
Procedure for indlæring af gulve
Hvis controlleren er udstyret med Absolute Encoder eller DMG Encoder eller Motor Encoder, er det muligt at drage fordel af gulvpositionslæringsfunktionen, hvilket giver mulighed for en hurtigere systemkonfiguration og finjustering. Fremgangsmåden er forskellig alt efter kodertype som beskrevet i følgende afsnit:
ELGO LIMAX 33CP: Manuel Teach Procedure
Hvis der i installationen ikke er nok frihøjde (reduceret hoved), anbefales det at lave manualen undervise uden for løfteakslen (mindst de første 3 trin): I dette tilfælde kan du bruge inspektionsboksen inde i controlleren og efter toppen af ar Inspektionsboks.
 Proceduren skal udføres, før systemet sættes i normal tilstand.
Proceduren skal udføres, før systemet sættes i normal tilstand.
For at starte proceduren skal Liften være i midlertidig drift. Indtil slutningen af manualen Teach Procedure er sikkerhedskontakterne forbundet på sikkerhedskæden, men er endnu ikke operative (Slutgrænsekontakt, Inspektionsgrænsekontakt, OSG, eSGC), fordi ELGO ikke kender den reelle position af akselens grænsepunkter. Den eneste kontrol baseret på ELGO Device er Teach over speed (0,4 m/s), så hvis kabinehastigheden er højere end 0,4 m/s, åbner ELGO OC-kontakt (og lukker OC-kontakten, når kabinen er stationær).
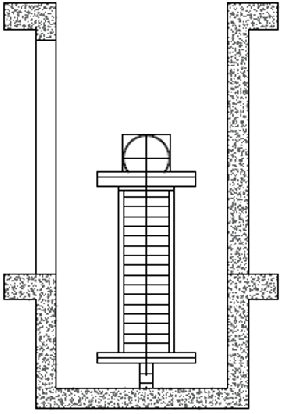 1) – Sæt elevatoren bilen i den højeste position (modvægt på buffere).
1) – Sæt elevatoren bilen i den højeste position (modvægt på buffere).
2) – Tryk samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at sætte ELGO-enheden i undervisningstilstand. På playpad'en vises en WAIT-blinkende meddelelse (i tilfælde af, at problemproceduren afsluttes med en Fejl ELGO, skal du se Fejlfinding).
ELGO-enheden tænder led MODE og begynder at give akustisk feedback (et bip hvert andet sekund). Dette akustiske signal vil være til stede under hele den manuelle undervisningsprocedure. På playpad viser en "TOP" blinkende besked.
 3) – Tryk igen samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at optage inde i ELGO det højeste punkt i akslen. Dette punkt vil være referencepunktet for Top grænser (Top limit switch, Top inspektion grænse, TOP ETSL kontrol, osv.).
3) – Tryk igen samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at optage inde i ELGO det højeste punkt i akslen. Dette punkt vil være referencepunktet for Top grænser (Top limit switch, Top inspektion grænse, TOP ETSL kontrol, osv.).
Den ELGO-enheden giver en lang akustisk feedback for at bekræfte, at topgrænsedataene er blevet registreret.
På playpad viser en "Floor n" blinkende besked (n er det gulv, du vil optage).
4) – Flyt kabinen op til øverste etage.
Tryk samtidigt på OP- og NED-knapperne i inspektionsboksen 3 gange for at optage gulvpositionen inde i ELGO.
Den ELGO-enheden giver en kort akustisk feedback for at bekræfte, at gulvdataene er blevet registreret.
På playpad viser en "Floor n-1" blinkende besked (n-1 er den næste etage, du vil optage).
 5) – Flyt kabinen nedad indtil næste etage.
5) – Flyt kabinen nedad indtil næste etage.
Tryk samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at optage i ELGO-gulvpositionen.
ELGO-enheden giver en kort akustisk feedback for at bekræfte, at gulvdataene er blevet registreret.
6) – Gentag det forrige punkt, indtil den nederste etage er nået.
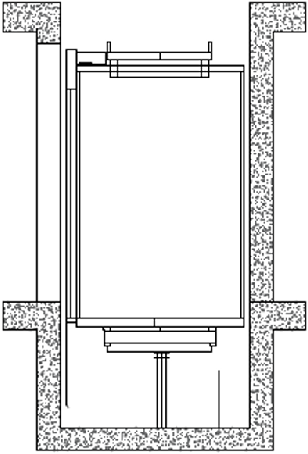
7) – Efter optagelse af the Placering på nederste etage på playpad viser en "BOTTOM" blinkende besked, flytte kabinen til det laveste punkt i akslen (kabine på bufferne).
Tryk samtidigt på knappen OP og NED i inspektionsboksen 3 gange for at optage inde i ELGO den laveste position. Dette punkt er oprindelsen af magnetbånd (0 mm vist) og vil være referencepunktet for bundgrænser (bundgrænsekontakt, bundinspektionsgrænse, bund ETSL-kontrol osv.).
ELGO-enheden giver en lang akustisk feedback for at bekræfte registreringen af data.
I dette øjeblik registrerer controlleren automatisk:
• Placering af erhvervede gulve
• Dørzoneposition, der bruges af controlleren til at aktivere dørkontakter bypass (foråbning / re nivellering).
• Decelerationsafstand i henhold til løftehastigheden.
 På playpad viser en "/\" blinkende besked: Flyt liften op til nederste etage position. Controlleren sætter ELGO i normal tilstand. (ikke muligt før, fordi ELGO ville være på grænserne åbning OC og låsning kabinen).
På playpad viser en "/\" blinkende besked: Flyt liften op til nederste etage position. Controlleren sætter ELGO i normal tilstand. (ikke muligt før, fordi ELGO ville være på grænserne åbning OC og låsning kabinen).
På playpad viser en "VENT" blinkende besked i 10 sekunder, vent til vil blive vist Floor 0.
ELGO-enheden stopper det akustiske bip, og LED MODE begynder at blinke (1 blink i sekundet).
Nu er ELGO-enheden operativ for sikkerhedskontakter:
• Elektronisk sikkerhedsudstyr (hvis det findes)
• Elektronisk OSG.
• Slutgrænseafbrydere.
• Inspektionsgrænseafbrydere administreres endnu ikke, fordi liften er i midlertidig tilstand.
Før den normale driftstilstand er det obligatorisk at udføre en automatisk aksellæring for at indstille de korrekte bremselængder i opadgående og nedadgående retning for hver etage.
Automatisk læringsprocedure (ELGO LIMAX33-CP)
9) – Elevatoren skal være i midlertidig drift. Sæt elevatoren på nederste etage med halvdelen af maksimal belastning.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Gør inspektionsvælgeren til Normal
Liften begynder at bevæge sig automatisk:
• Opadgående ture med deceleration og stop ved hver etage.
• Nedadgående ture med deceleration og stopper ved hver etage.
Når kabinen kommer tilbage til nederste etage, er systemet klar til at gå ind til Normal service.
After automatic learning procedure in <Positioning>, Skærmkoder du kan for at indstille:
• Decelerationsafstande i normal drift for decelerationskonfort
– R1S (Side 3) opadgående decelerationsafstand
– R1D (Pag. 2) nedadgående decelerationsafstand
Disse værdier indstilles automatisk efter automatisk læring i henhold til liftens hastighed (se løftehastighed og decelerationsafstand).
• Stop afstande i Shaft's Inspection
– I_LIM_S opadgående stopafstand før øverste etage
– I_LIM_D nedadgående stopafstand før nederste gulvposition
I Reduceret hoved/pit skal disse værdier tages i betragtning i henhold til det forududløsede sikkerhedssystem.
• Stop afstande i normal service
– N_LIM_S opadgående stopafstand efter øverste etageposition
– N_LIM_D nedadgående stopafstand efter nederste gulvposition
Disse værdier indstilles automatisk efter automatisk læring i en afstand svarende til 30 mm fra ekstreme gulve (i tilfælde af mindre afstand fra referencepunkter betragtes det som midtpunktet mellem ekstremt gulv og ekstreme referencepositioner).
• ELGO+eSGC pre-Trigger position
– TRIPS afstand fra øverste referenceposition, hvor eSGC elektrisk kommando tvinger kabinen til at stoppe (kun for reduceret hovedløft).
– TRIPD afstand fra bunden Referenceposition, hvor eSGC elektrisk kommando tvinger kabinen til at stoppe (kun til reduceret pitinstallation)
Disse værdier er skrivebeskyttede værdier og er kun større end 0 mm, hvis ELGO er en del af Safety pre.-Triggered system (togheter with electric Safety Gear / Overspeed Governor).
Proceduren skal udføres, før systemet sættes i normal tilstand.For at starte proceduren skal Liften være i midlertidig drift. Indtil slutningen af manualen Teach Procedure er sikkerhedskontakterne forbundet på sikkerhedskæden, men er endnu ikke operative (Slutgrænsekontakt, Inspektionsgrænsekontakt, OSG, eSGC), fordi ELGO ikke kender den reelle position af akselens grænsepunkter. Den eneste kontrol baseret på ELGO Device er Teach over speed (0,4 m/s), så hvis kabinehastigheden er højere end 0,4 m/s, åbner ELGO OC-kontakt (og lukker OC-kontakten, når kabinen er stationær).
1) – Sæt elevatoren bilen i den højeste position (modvægt på buffere).2) – Tryk samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at sætte ELGO-enheden i undervisningstilstand. På playpad'en vises en WAIT-blinkende meddelelse (i tilfælde af, at problemproceduren afsluttes med en Fejl ELGO, skal du se Fejlfinding).
ELGO-enheden tænder led MODE og begynder at give akustisk feedback (et bip hvert andet sekund). Dette akustiske signal vil være til stede under hele den manuelle undervisningsprocedure. På playpad viser en "TOP" blinkende besked.
3) – Tryk igen samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at optage inde i ELGO det højeste punkt i akslen. Dette punkt vil være referencepunktet for Top grænser (Top limit switch, Top inspektion grænse, TOP ETSL kontrol, osv.).Den ELGO-enheden giver en lang akustisk feedback for at bekræfte, at topgrænsedataene er blevet registreret.
På playpad viser en "Floor n" blinkende besked (n er det gulv, du vil optage).
4) – Flyt kabinen op til øverste etage.
Tryk samtidigt på OP- og NED-knapperne i inspektionsboksen 3 gange for at optage gulvpositionen inde i ELGO.
Den ELGO-enheden giver en kort akustisk feedback for at bekræfte, at gulvdataene er blevet registreret.
På playpad viser en "Floor n-1" blinkende besked (n-1 er den næste etage, du vil optage).
5) – Flyt kabinen nedad indtil næste etage.Tryk samtidigt på op- og ned-knappen i inspektionsboksen 3 gange for at optage i ELGO-gulvpositionen.
ELGO-enheden giver en kort akustisk feedback for at bekræfte, at gulvdataene er blevet registreret.
6) – Gentag det forrige punkt, indtil den nederste etage er nået.
7) – Efter optagelse af the Placering på nederste etage på playpad viser en "BOTTOM" blinkende besked, flytte kabinen til det laveste punkt i akslen (kabine på bufferne).
Tryk samtidigt på knappen OP og NED i inspektionsboksen 3 gange for at optage inde i ELGO den laveste position. Dette punkt er oprindelsen af magnetbånd (0 mm vist) og vil være referencepunktet for bundgrænser (bundgrænsekontakt, bundinspektionsgrænse, bund ETSL-kontrol osv.).
ELGO-enheden giver en lang akustisk feedback for at bekræfte registreringen af data.
I dette øjeblik registrerer controlleren automatisk:
• Placering af erhvervede gulve
• Dørzoneposition, der bruges af controlleren til at aktivere dørkontakter bypass (foråbning / re nivellering).
• Decelerationsafstand i henhold til løftehastigheden.
På playpad viser en "/\" blinkende besked: Flyt liften op til nederste etage position. Controlleren sætter ELGO i normal tilstand. (ikke muligt før, fordi ELGO ville være på grænserne åbning OC og låsning kabinen).På playpad viser en "VENT" blinkende besked i 10 sekunder, vent til vil blive vist Floor 0.
ELGO-enheden stopper det akustiske bip, og LED MODE begynder at blinke (1 blink i sekundet).
Nu er ELGO-enheden operativ for sikkerhedskontakter:
• Elektronisk sikkerhedsudstyr (hvis det findes)
• Elektronisk OSG.
• Slutgrænseafbrydere.
• Inspektionsgrænseafbrydere administreres endnu ikke, fordi liften er i midlertidig tilstand.
Før den normale driftstilstand er det obligatorisk at udføre en automatisk aksellæring for at indstille de korrekte bremselængder i opadgående og nedadgående retning for hver etage.
Automatisk læringsprocedure (ELGO LIMAX33-CP)
9) – Elevatoren skal være i midlertidig drift. Sæt elevatoren på nederste etage med halvdelen af maksimal belastning.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Gør inspektionsvælgeren til Normal
Liften begynder at bevæge sig automatisk:
• Opadgående ture med deceleration og stop ved hver etage.
• Nedadgående ture med deceleration og stopper ved hver etage.
Når kabinen kommer tilbage til nederste etage, er systemet klar til at gå ind til Normal service.
After automatic learning procedure in <Positioning>, Skærmkoder du kan for at indstille:
• Decelerationsafstande i normal drift for decelerationskonfort
– R1S (Side 3) opadgående decelerationsafstand
– R1D (Pag. 2) nedadgående decelerationsafstand
Disse værdier indstilles automatisk efter automatisk læring i henhold til liftens hastighed (se løftehastighed og decelerationsafstand).
• Stop afstande i Shaft's Inspection
– I_LIM_S opadgående stopafstand før øverste etage
– I_LIM_D nedadgående stopafstand før nederste gulvposition
I Reduceret hoved/pit skal disse værdier tages i betragtning i henhold til det forududløsede sikkerhedssystem.
• Stop afstande i normal service
– N_LIM_S opadgående stopafstand efter øverste etageposition
– N_LIM_D nedadgående stopafstand efter nederste gulvposition
Disse værdier indstilles automatisk efter automatisk læring i en afstand svarende til 30 mm fra ekstreme gulve (i tilfælde af mindre afstand fra referencepunkter betragtes det som midtpunktet mellem ekstremt gulv og ekstreme referencepositioner).
• ELGO+eSGC pre-Trigger position
– TRIPS afstand fra øverste referenceposition, hvor eSGC elektrisk kommando tvinger kabinen til at stoppe (kun for reduceret hovedløft).
– TRIPD afstand fra bunden Referenceposition, hvor eSGC elektrisk kommando tvinger kabinen til at stoppe (kun til reduceret pitinstallation)
Disse værdier er skrivebeskyttede værdier og er kun større end 0 mm, hvis ELGO er en del af Safety pre.-Triggered system (togheter with electric Safety Gear / Overspeed Governor).
DMG Encoder eller Motor Encoder: Automatisk læringsprocedure for gulve
Efter installationen og i MIDLERTIDIG DRIFT-tilstand udfører controlleren en række opadgående/nedadgående prøvekørsler (høj hastighed først og derefter lav hastighed med stop ved gulve) med det formål at lære den nøjagtige gulvpositionering.
Selvlæringsprocedure:
1) – Kontroller, at installationen er i tilstanden "Midlertidig handling"
2) – Sørg for, at koderen sporer den korrekte kørselsretning (stigende afstand, når den er opadgående, faldende afstand, når den er nedad). i menuen "positionering" angiver om nødvendigt parameterpositioneringssystemet fra uret til mod uret (eller omvendt) og gemmer den nye indstilling.

3) – Kontroller den korrekte aflæsning af ZP-indgang (dørzone) (ZP LED på PLAYPAD-modulet skal lyses op, når du er i dørzonen)
4) – Kontroller den korrekte aflæsning af AGB/AGH-indgange (deceleration limit switches) (AGB/AGH skal være åben, når de er i decelerationsgrænsepositioner)
5) – Sørg for, at kabinen er på nederste etage (AGB åben, ZP LED på)
6) – Angiv menuen "Placering", vælg parameteren For automatisk indstilling, og indtast:
- På DMG-enkoderen: enkoderens opløsning (64 eller 100 impulstal i henhold til enkodermodellen), derefter længden af gulvmagneterne. (Dørzonens længde). Bekræft det samlede antal etager, og tryk derefter på "Ja" for at starte proceduren.
• På motorkoderen: koderopløsningen, motorforholdet, trækkraftskiven og ropingen. Bekræft det samlede antal etager, og tryk derefter på "Ja" for at starte proceduren.
7) – Indstil inspektionspanelets vælger på NORMAL (hvis den findes), ellers skal du sørge for, at sikkerhedskæden er lukket.
Systemet udfører følgende automatiske procedure:
• Bevæger sig op, indtil signalet ZP på nederste etage er deaktiveret
• Bevæger sig ned, indtil signalet ZP på nederste etage er aktiveret
• Bevægelse op ved høj hastighed og position detektion for hver etage (nederste kant af døren zone magneter); den nøjagtige position af magnetens nederste kant gemmes i controllerens hukommelse.
• Når systemet når det øverste decelerationspunkt (AGH), skifter det til lav hastighed, og når det når den øverste etagedørzone (ZP), stopper det.
• Flytning ned ved høj hastighed og position detektion for hver etage (øverste kant af døren zone magneter); den nøjagtige position af magnetens øverste kant gemmes i controllerens hukommelse.
• Når systemet når det nederste decelerationspunkt (AGB), swithes det til lav hastighed, og når det når den nederste gulvdørzone (ZP), stopper det.
• Flytning op bremse og stoppe ved hver etage (på ZP magnet niveau)
• Flytning ned bremse og stoppe ved hver etage (på ZP magnet niveau)
Efter det andet sæt kørsler (som slutter på nederste etage), er installationen klar til at gå i SERVICE-tilstand.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
BEMÆRK: Selvlæringsproceduren skal udføres, hver gang enten AGB/AGH-grænseafbrydere og/eller dørzonemagneter flyttes fra deres oprindelige position.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH afstande er nok til løftehastigheden. Er det muligt at øge/mindske decelerationsafstande i Normal service R1S og R1D uden behov for at gentage automatisk læringsprocedure.
Til AGB/AGH-positioner og decelerationsafstande skal du bruge bord i henhold til liftens hastighed.
I systemer, hvor de krævede mindstemål i toppen og bunden af akslen er garanteret i henhold til kravene i regulativ EN 81, er det muligt at anvende to parametre til at stoppe liften i Inspektion.
In <Positioning>, Skærmkoder
• I_LIM_S opadgående stopafstand før øverste etage
• I_LIM_D nedadgående stopafstand før nederste gulvposition
Disse bremselængder er gyldige til inspektion fra akslen (er ikke aktive i tilfælde af inspektion fra maskinrummet) og kan bruges til at undgå risikoen for, at teknikeren bliver fanget inde i elevatorskakten.
Husk, at disse stoppositioner ikke er sikkerhedskontakter.
Selvlæringsprocedure:
1) – Kontroller, at installationen er i tilstanden "Midlertidig handling"
2) – Sørg for, at koderen sporer den korrekte kørselsretning (stigende afstand, når den er opadgående, faldende afstand, når den er nedad). i menuen "positionering" angiver om nødvendigt parameterpositioneringssystemet fra uret til mod uret (eller omvendt) og gemmer den nye indstilling.
3) – Kontroller den korrekte aflæsning af ZP-indgang (dørzone) (ZP LED på PLAYPAD-modulet skal lyses op, når du er i dørzonen)
4) – Kontroller den korrekte aflæsning af AGB/AGH-indgange (deceleration limit switches) (AGB/AGH skal være åben, når de er i decelerationsgrænsepositioner)
5) – Sørg for, at kabinen er på nederste etage (AGB åben, ZP LED på)
6) – Angiv menuen "Placering", vælg parameteren For automatisk indstilling, og indtast:
- På DMG-enkoderen: enkoderens opløsning (64 eller 100 impulstal i henhold til enkodermodellen), derefter længden af gulvmagneterne. (Dørzonens længde). Bekræft det samlede antal etager, og tryk derefter på "Ja" for at starte proceduren.
• På motorkoderen: koderopløsningen, motorforholdet, trækkraftskiven og ropingen. Bekræft det samlede antal etager, og tryk derefter på "Ja" for at starte proceduren.
7) – Indstil inspektionspanelets vælger på NORMAL (hvis den findes), ellers skal du sørge for, at sikkerhedskæden er lukket.
Systemet udfører følgende automatiske procedure:
• Bevæger sig op, indtil signalet ZP på nederste etage er deaktiveret
• Bevæger sig ned, indtil signalet ZP på nederste etage er aktiveret
• Bevægelse op ved høj hastighed og position detektion for hver etage (nederste kant af døren zone magneter); den nøjagtige position af magnetens nederste kant gemmes i controllerens hukommelse.
• Når systemet når det øverste decelerationspunkt (AGH), skifter det til lav hastighed, og når det når den øverste etagedørzone (ZP), stopper det.
• Flytning ned ved høj hastighed og position detektion for hver etage (øverste kant af døren zone magneter); den nøjagtige position af magnetens øverste kant gemmes i controllerens hukommelse.
• Når systemet når det nederste decelerationspunkt (AGB), swithes det til lav hastighed, og når det når den nederste gulvdørzone (ZP), stopper det.
• Flytning op bremse og stoppe ved hver etage (på ZP magnet niveau)
• Flytning ned bremse og stoppe ved hver etage (på ZP magnet niveau)
Efter det andet sæt kørsler (som slutter på nederste etage), er installationen klar til at gå i SERVICE-tilstand.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
BEMÆRK: Selvlæringsproceduren skal udføres, hver gang enten AGB/AGH-grænseafbrydere og/eller dørzonemagneter flyttes fra deres oprindelige position.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH afstande er nok til løftehastigheden. Er det muligt at øge/mindske decelerationsafstande i Normal service R1S og R1D uden behov for at gentage automatisk læringsprocedure.
Til AGB/AGH-positioner og decelerationsafstande skal du bruge bord i henhold til liftens hastighed.
I systemer, hvor de krævede mindstemål i toppen og bunden af akslen er garanteret i henhold til kravene i regulativ EN 81, er det muligt at anvende to parametre til at stoppe liften i Inspektion.
In <Positioning>, Skærmkoder
• I_LIM_S opadgående stopafstand før øverste etage
• I_LIM_D nedadgående stopafstand før nederste gulvposition
Disse bremselængder er gyldige til inspektion fra akslen (er ikke aktive i tilfælde af inspektion fra maskinrummet) og kan bruges til at undgå risikoen for, at teknikeren bliver fanget inde i elevatorskakten.
Husk, at disse stoppositioner ikke er sikkerhedskontakter.
Videoselvstudium
Sådan konfigureres ELGO-positioneringssystemet med en controller Pitagora 4.0






