

Placa base
La placa de control del sistema Pitagora 4.0 se basa en la tecnología electrónica de 32 bits y maneja todo tipo de ascensores eléctricos e hidráulicos. Se pueden añadir conexiones en serie y/o en paralelo a las botoneras (cabina y suelo). Es especialmente adecuado para las instalaciones eléctricas VVVF, también las equipadas con el sistema de movimiento incontrolado de la cabina del ascensor (enmienda A3 o EN81-20 / 50).
- Hasta 28 plantas con control en serie y hasta 12 plantas con control en paralelo
- Línea serie CAN Bus para conectar la pantalla y los paneles de operación de aterrizaje en serie
- Línea serie CAN Bus para la comunicación de la cabina del ascensor en serie
- APB; Colectivo descendente, Colectivo completo
- Control de sistemas multiplexados (máx. 6)
- Control alternativo o selectivo de puertas en sistemas de acceso pasante o adyacente
- Control de posición del ascensor por contactos magnéticos, codificador de eje DMG incremental, codificador de motor o sistema de posicionamiento absoluto ELGO LIMAX 33 CP
- Interfaz de programación/diagnóstico, a bordo y/o remoto.
- Diagnóstico de estado, errores, fallos y estado de E/S
- Manejo de parámetros y diagnósticos de la VVVF (sólo FUJI FRENIC LIFT LM2)
- Control avanzado de la VVVF con velocidad, confort y control de parada de precisión
- Actualización de software a través de dispositivo USB
- Línea serie RS232 para conexión a PC y módem GPRS
- Compatibilidad con todos los productos DMG
- Compatibilidad con todas las soluciones +A3 para sistemas eléctricos e hidráulicos
- Protección de acceso al eje (Acceso no autorizado al eje)
La placa base 4.0 contiene el hardware y el software que permite controlar el ascensor y todos sus periféricos. A través de los módulos de programación integrados y/o remotos permite acceder a todas las funciones disponibles. Las entradas y salidas están conectadas a todos los dispositivos electrónicos y electromecánicos del controlador y del ascensor.
La placa base dispone de un módulo de programación extraíble que permite la visualización y edición de todos los parámetros básicos para la gestión y configuración de la central. En la versión de VVVF, también se pueden ver y editar los parámetros de FUJI de la configuración básica (menú VVVF BASE) y avanzada (menú VVVF ADVANCED).
Para más detalles sobre el funcionamiento del módulo de programación y un amplio menú del sistema de gestión, véase el apartado Cambio de los parámetros del sistema.
Módulo de programación a distancia
Una forma alternativa de acceder al menú de configuración del controlador, en el modo de visualización/modificación, es conectando el teclado extraíble de la Playboard DMG V3 (PlayPad), al conector PLP V3, montado en la placa de control del ascensor.
Este módulo puede conectarse de varias maneras:
- Conectado directamente
- Conectado por un cable de extensión dedicado directamente en el tablero (en la sala de máquinas)
- Conectado a la placa del techo de la cabina del ascensor (TOC) en el caso de los ascensores con dispositivos en serie precableados por DMG.
Una forma alternativa de acceder al controlador se basa en Fusion App.

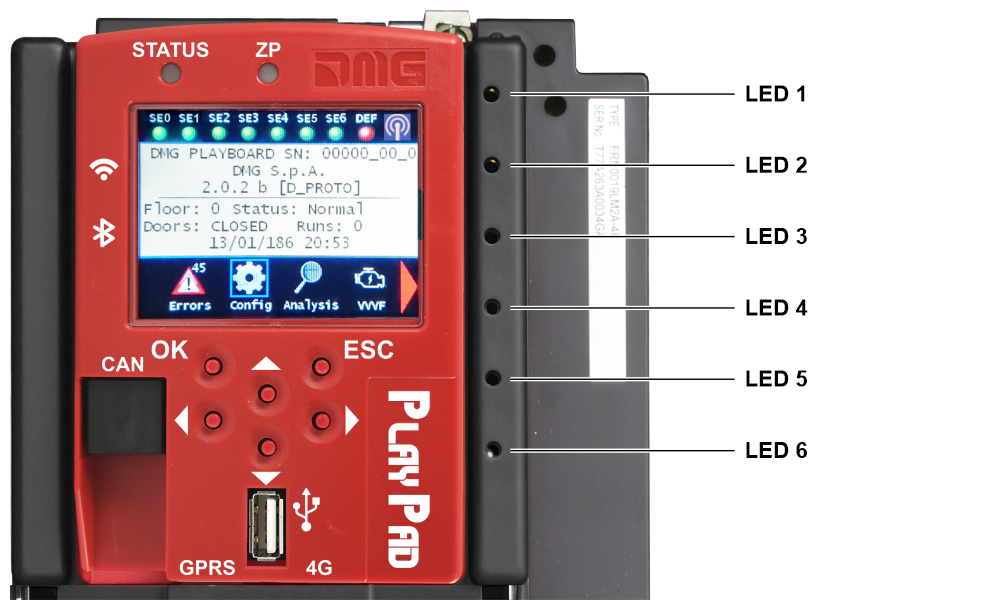
En la placa base están presentes 6 leds para un fácil diagnóstico:
LED1 (led verde)
Terminación del multiplex CAN activa: el led se apaga cuando la placa MULX está conectada (la terminación se desplaza automáticamente en la placa MULX del primer y último controlador del multiplex).
LED2 (LED verde)
Terminación del cable CAN activa: el led se apaga cuando se conecta una tarjeta opcional (PIT8 / 16IO / 16RL) dentro del controlador (la terminación se mueve automáticamente en la última tarjeta opcional).
LED3 (led RGB)
El color de este led da información sobre el estado interno del ascensor según la siguiente tabla:
| Color | Estado |
|---|---|
| Apagado | El sistema está realizando el procedimiento de reinicio |
| Verde | El sistema está en modo de funcionamiento normal |
| Amarillo | El sistema está en modo de inspección |
| Rosa | El sistema está en modo de operaciones temporales |
| Púrpura | El sistema está fuera de servicio (estacionamiento de la cabina) |
| Cyan | El sistema está funcionando en modo prioritario (LOP / CAR) |
| Rojo | El sistema está funcionando en el modo de bomberos |
| Blanco | El sistema está realizando el procedimiento de emergencia |
| Azul | El sistema está realizando el procedimiento de control de deriva de la cabina del ascensor |
LED4 (LED amarillo)
El led parpadea cuando la placa está en funcionamiento.
LED5 (LED verde)
Led on da el estado de la cadena de seguridad SE5
LED6 (LED rojo)
| Led Off | Ningún fallo activo |
| Led intermitente | Un (o más) fallo activo |
| Led On | Fallo de bloqueo activo |

| Nombre | Descripción | |
|---|---|---|
| FJ1 | Interfaz FUJI | Conexión a la interfaz FUJI dentro del inversor. |
| J4 | FUJI Analógico / Serie | Conexión con el FUJI utilizado en caso de inversor remoto. |
| J6 | Señales paralelas | Conexión a la placa APPO. Incluye todas las señales paralelas disponibles en el bloque de terminales del interior del panel de control. |
| J8 | Circuito UCM | Conexión al circuito para la solución UCM. Pitagora 4.0 dispone de soluciones propias y certificadas para la gestión de la solución UCM en instalaciones de ascensores. El sistema UCM consta de tres partes: - Detector que detecta un movimiento involuntario de la cabina. - Actuador que ejecuta la acción de frenado. - Dispositivo de parada que detiene la cabina. El Dispositivo de Parada debe ser un dispositivo de seguridad certificado y es responsabilidad del instalador asegurar la compatibilidad de los diferentes elementos del sistema UCM. Para la verificación del funcionamiento de todo el sistema y la medición de los espacios y los tiempos de intervención, se prevén pruebas específicas a realizar al final del montaje (ver Pruebas y mediciones) Para más información sobre las conexiones y los parámetros, véase la sección de circuitos UCM). Una lista no exhaustiva de los tipos de sistemas y soluciones UCM más utilizados se muestra en la siguiente tabla, donde se destacan las diferentes soluciones aplicables, cada una de las cuales tiene su propia interfaz y circuito de programación. La interconexión con los dispositivos enumerados se realiza según las especificaciones indicadas en los manuales de los fabricantes correspondientes. Cuando se proporciona el sistema de posicionamiento absoluto ELGO LIMAX 33CP(enlace), se utiliza su función UCM certificada. Véase la tabla "Sistema UCM" que figura a continuación |
| J9 | Circuito de relanzamiento | Circuito para hacer Bypass de Contacto de Seguridad de la Puerta para: - Preapertura y/o - Renivelación En el caso del sistema de Posicionamiento por Encoder Absoluto este conector no se utiliza. El circuito de gestión de la operación de renivelación está compuesto por un Módulo de Seguridad y un Relé de Seguridad. Este circuito permite el by-pass de los contactos de seguridad de las puertas, permitiendo así el movimiento de la cabina con las puertas abiertas a velocidad reducida en la zona permitida (zona de desbloqueo de las puertas) en el caso de descenso del nivel de la cabina del ascensor, parada no precisa de la cabina del ascensor, o preapertura de las puertas. La salida ISO se cierra a GND. - Salida ISO (contacto de relé de seguridad puertas by-pass) colector abierto Máx. 24V 100mA - Entrada CCISO (Monitor ISO relé de seguridad) cierre a GND (NC) I = 5mA - Entrada TISO (Monitor Safty module) cierre a GND (NC) I = 5mA - S11-S12 (contacto libre) se cierra cuando ISO1 está cerrado La segunda señal de habilitación del módulo de seguridad proviene directamente de un segundo sensor (ISO2) y debe cerrarse a GND. |
| J10 | Light Curtain / >|< | Utilizar sólo en configuración completamente paralela. Conexión al terminal de tornillo del gabinete. |
| J11 | Cadena de seguridad | Conexión a la placa SECU. Incluye la lectura de los 7 puntos de la cadena de seguridad. El sistema se basa en un circuito optoaislado conectado a tierra (dentro de la placa SEC): - Entrada SE0 <-> SE6 optoaislado 48 Vdc Por encima del circuito de seguridad debe haber un disyuntor magnético de tamaño adecuado (Imax = 0,5 A). - SE0 es el punto de inicio de la cadena de seguridad (después de la protección DIS dentro del controlador) - SE1 controla la zona de parada del eje y la caja de inspección del foso - SE2 controla la zona de STOP de la cabina del ascensor y la caja de inspección TOC - SE3 controla los Interruptores de Límite, el Equipo de Seguridad, el Regulador de Sobrevelocidad - SE4 controla los BLOQUEOS PRELIMINARES DEL PISO - SE5 controla las CERRADURAS DEL PISO - SE6 controla las PUERTAS DE LA VAGINA y los sistemas de contacto de los pre-disparos Si se activa el final de carrera, el limitador de velocidad o el paracaídas (se abre el punto de la cadena de seguridad SE3), el sistema queda fuera de servicio. Para volver a ponerlo en servicio hay que resetear el error SE3 a través del módulo de programación. Obviamente, el contacto de seguridad del final de carrera debe ser reajustado primero. |
| J12 | CAN múltiplex | Conexión a la placa MULX. Incluye la línea CAN para instalaciones Multiplex. Para más información sobre las conexiones y los parámetros, véase el ANEXO I. |
| J13 | Coche en el suelo | Salida de señal del sensor de la zona de la puerta para la señal luminosa en el armario. |
| J14 | Mando hidráulico | Conexión a la placa COIL. Incluye los comandos de movimiento para las instalaciones hidroeléctricas. Se puede utilizar también en el caso de instalaciones de Inversor Remoto. |
| J15 | Circuito EN81-21 | Conexión al Circuito para gestionar la Protección en caso de Instalación con Espacio Reducido en el Foso. Incluye la gestión del Circuito Biestable en puertas y dispositivos de Protección (sistema de pre-disparo o Protección Manual en el Foso). Para más información sobre conexiones y parámetros ver ANEXO IX. |
| J16 | Posición del codificador | Sistema de posicionamiento basado en un codificador incremental: - Codificador de eje DMG o - Codificador del motor (sólo para el elevador de motor sin engranajes VVVF) En el caso del sistema de Posicionamiento por Encoder Absoluto este conector no se utiliza. |
| J18 | Temperatura ambiente | Conexión al sensor de temperatura ambiental. Para utilizar la función de control de la temperatura ambiental el módulo sensor de temperatura DMG (Cod. Q40.SND). Esta función detiene el sistema cuando la temperatura de la sala de máquinas desciende por debajo del mínimo o aumenta por encima del umbral máximo establecido. |
| J19 | Panel PME | Conexión con el panel de control dentro del armario. |
| J20 | Salida de repuesto | Salida genérica utilizada para funciones especiales. |
| J21 | Circuito de emergencia | Circuito de Emergencia o Evacuación completo con apertura de Freno. |
| J22 | Relé de motor | Conexión al relé de los contactores de motor (o señales de habilitación en caso de instalación sin contactores). Incluye también la entrada de monitorización de los contactores principales. |
| J23 | Relé de freno | Conexión al relé de los contactores de freno (o de las válvulas en el caso de la instalación Hydro). Incluye también la entrada de monitorización de los contactores de freno. |
| J25 | Prueba de las baterías | Conexión a la placa CHAR. Incluye las señales para: - Baterías bajas - Secuencia de fases (sólo Hydro) - Modo de respaldo |
| J26 | Tablas opcionales | DMG Tablero opcional para: - Pulsadores precableados en paralelo (PIT8) - Tarjeta de salida de 16 relés (16RL): La tarjeta de expansión es necesaria, en particular, para accionar las pantallas paralelas (1 Cable / Piso, 1 Cable / Segmento, Código Gris, binario) como las salidas directas disponibles - Tarjeta de 16 entradas/salidas (16IO) |
| M1 | Fuente de alimentación | Alimentación de un proveedor comercial de energía estabilizada. El terminal negativo de los circuitos de alimentación y del cargador de baterías debe estar conectado a tierra. Alimentación del reloj interno: Supercondensador (autonomía de 5 días sin alimentación). |
| Sistema UCM | |||
|---|---|---|---|
| Tipo de sistema | Detector | Actuador | Dispositivo de parada |
| Ascensor eléctrico. No hay maniobras con las puertas abiertas. | No es necesario. (sólo monitor de frenos) | ||
| Ascensor eléctrico. Maniobras con puertas abiertas. | Pitagora 4.0 | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Frenos (*) |
| Ascensor eléctrico. Maniobras con puertas abiertas con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Frenos (*) |
| Elevador eléctrico. Regulador de velocidad con dispositivo antideriva (**) | Pitagora 4.0 | Interrupción de la alimentación de la clavija. | Equipo de seguridad |
| Elevador eléctrico. Regulador de velocidad con dispositivo antideriva (**) con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupción de la alimentación de la clavija. | Equipo de seguridad |
| Elevador hidráulico con doble válvula de descenso | Pitagora 4.0 | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Válvulas (***) |
| Elevador hidráulico con doble válvula de descenso con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Válvulas (***) |
| Elevación hidráulica con gestión electrónica de válvulas (unidad de control certificada) | Pitagora 4.0 | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Válvulas (***) |
| Elevación hidráulica con gestión electrónica de válvulas (unidad de control certificada) con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupción de los controles de los frenos (cadena de seguridad abierta) | Válvulas (***) |
(*) solución aplicable exclusivamente a los frenos dobles certificados como elemento de parada UCM según la norma EN81-20 5.6.7.3 y 5.6.7.4 (Motores sin engranajes o con caja de cambios y freno de eje lento).
(**) Limitadores certificados por la UCM con clavija antideriva (por ejemplo Montanari RQxxx-A, PFB LKxxx con bobina LSP, o dispositivos similares).
(***) Válvulas en serie certificadas como elemento de cierre UCM según EN81-20 5.6.7.3 y 5.6.7.4
Menú de programación y modificación de los parámetros del sistema
Mapa del menú de la pantalla V3
| TABLERO DE CONTROL DEL ASCENSOR DMG S.p.A. | ¿Idioma? Francés, inglés, portugués, italiano, ruso, alemán, holandés ENTER: confirmar / ESC: salir |
|
| ▲ ▼ | ▲ | |
| ¿Código? Contraseña... | ----- ENTER ----> | Estado del sistema |
| ▲ ▼ | ||
| Fallos | ||
| ▲ ▼ | ||
| Estado de E/S | ||
| ▲ ▼ | ||
| Configuración | ||
| ▲ ▼ | ||
| Puertas | ||
| ▲ ▼ | ||
| Señales | ||
| ▲ ▼ | ||
| Funciones especiales | ||
| ▲ ▼ | ||
| Posicionamiento | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Parámetros Rec. | ||
| ▲ ▼ | ||
| Reloj |
 Después de seleccionar el idioma deseado es necesario realizar el Actualización del software
Después de seleccionar el idioma deseado es necesario realizar el Actualización del softwareMenú "Estado del sistema"
Se accede fácilmente desde la ventana principal del PlayPad, pulsando una vez la tecla ENTER.
| Estado del sistema | Descripción | Visualización en Visualización en serie |
|---|---|---|
| Reiniciando | El sistema está realizando el procedimiento de reinicio | O - |
| En servicio | El sistema está en modo de funcionamiento normal | |
| Inspección | El sistema está en modo de inspección | O |
| Temp. Operat | El sistema está en modo de operaciones temporales | P |
| Fuera de servicio | El sistema está fuera de servicio | |
| Prioridad del coche | El sistema está funcionando en modo de prioridad de cabina de ascensor (interruptor de llave de prioridad activado) | |
| Bomberos | El sistema funciona en modo de bomberos (varias operaciones) | |
| Emergencia | El sistema está realizando el procedimiento de emergencia | E |
| Control de la deriva | El sistema está realizando el procedimiento de control de deriva de la cabina del ascensor | |
| Operación ascendente | El sistema está funcionando al alza | |
| Operación descendente | El sistema va hacia abajo | |
| Renivelación | La cabina del ascensor está a nivel del suelo y se está renivelando | |
| Todavía en el suelo | La cabina del ascensor está a nivel del suelo, sin llamadas registradas | |
| Alta velocidad | El sistema está funcionando en modo de alta velocidad | |
| Baja velocidad | El sistema está funcionando en modo de baja velocidad | |
| Cierre de la puerta | La puerta está completamente cerrada | |
| Puerta abierta | La puerta se abre (o se abre/cierra) | |
| Coche lleno | La cabina del ascensor se ha cargado completamente | |
| Fotocélula A | La entrada correspondiente a la entrada de la fotocélula A está activa | |
| Fotocélula B | La entrada correspondiente a la entrada de la fotocélula B está activa | |
| Botón BRA | La entrada correspondiente al botón de apertura de la puerta de la entrada A está activa | |
| Botón BRB | La entrada correspondiente al pulsador de puerta abierta de la entrada B está activa |
Menú "Fallos"
Este menú muestra los últimos 60 fallos almacenados en la memoria interna del controlador. Todos los fallos se describen en la sección de Resolución de Problemas.
ADVERTENCIA: En caso de apagón, la memoria interna se guarda sólo si la batería está conectada.
| Piso 0 12:30:56 | ----- ENTER ----> | Piso 0 No hay fallos | ||
| ----- ENTER ----> | Piso 0 Fallos: 4 ¿Imagen? | ----- ENTER ----> | < Fallos > 3/4 43 = Inspección Pos: 0 # 1 Cod. 0 17/03/09 10:10 * (ver detalles más abajo) |
|
| ▲ ▼ | ||||
| Restablecer todos los fallos registrados (pulse ENTER para confirmar) NOTA: los fallos se borran cuando la cabina del ascensor se detiene | Piso 0 Fallos: 4 ¿Reinicio? | |||
| ▲ ▼ | ||||
| Borrar el error detectado en el final de carrera (pulse ENTER para confirmar) NOTA: la anulación real se produce sólo cuando el sistema de memoria está parado | Piso 0 Fallos: 4 ¿Reiniciar XXX? (ver tabla abajo) | |||
| Fallo | Descripción |
|---|---|
| Reiniciar SE3 | Fallo del final de carrera; sólo se puede borrar después de cerrar la cadena de seguridad. |
| Restablecer 82212 | Control de la deriva |
| Restablecer RSP | Fallo del RSP; por reducción de la fosa y del espacio libre. |
| Restablecer UCM | Fallo de la UCM; para la enmienda A3 |
| Restablecer ISO | Fallo ISO; detección de problemas en la monitorización del funcionamiento del módulo de seguridad para la apertura / renivelación avanzada de la puerta. |
| Reiniciar el SCS | Fallo del SCS; instalación 81-20. |
| Reiniciar el UAS | Fallo del UAS; Función especial. |
Menú "Estado de E/S"
 | ----->>>>> |  | ----->>>>> | Piso 0 - 12:30:56 < Estado de E/S > |
| Campo | Descripción | Navegación | Valores (grupo de 12) | ||||
|---|---|---|---|---|---|---|---|
| Llamada al coche | Simulación de la llamada de una cabina de ascensor | ▲▼ (Seleccionar piso) ENTER (Confirmar) ESC (Salir) | |||||
 Tablero de juego IN-OUT | Entradas/salidas del sistema □ = Contacto abierto ■ = Contacto cerrado | ▲▼ (Cambiar de grupo) ENTER (Salir) ESC (Salir) | GRUPOS | ||||
| 1/9 | REM VHS SUR | ROJO TH1 COM | REV TH2 LE | REV1 REV2 LTMP |
|||
| 2/9 | RMO BRK RDE | RGV RMV RPV | MTR YBRK CCF | CCO CCOB |
|||
| 3/9 | BRA FOA ROA | CEA FFA RFA | BRB FOB ROB | CEB FFB RFB |
|||
| 4/9 | HS BFR OTM | PCA | POM RPH J20 | CPOM IEME OEME |
|||
| 5/9 | FLM FLD | BIP GNGM GNGD | 511B 511L | DSA 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | FAI ZP | FAS TISO | CAM ISO | AGH AGB CISO |
|||
| 8/9 | REM REM1 REM2 | RED RED1 RED2 | PME OVS | REV REV1 REV2 |
|||
| 9/9 | L-RED L-VERDE BUZZER | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF IN-OUT | Entradas/salidas VVVF □ = Contacto abierto ■ = Contacto cerrado | ▲▼ (Cambiar de grupo) ENTER (Salir) ESC (Salir) | GRUPOS | ||||
| 1/8 | ES FWD REV | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 RST | Y3 30 A/B/C | Y4 | |||
| 3/8 | BUSY ACC DEC | ALM INT BRK | EXT NUV RL | TL VL IL |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST --- | Fref = 0,00 Hz TRQ --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Encoder 0 P/s --- kW PRINCIPAL = |
||||||
| 7/8 | Fallo VVVF 0 = --- 2 = --- | Fallo VVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 Pulsadores | Estado de los botones de llamada □ = Botón no activado ■ = Botón activado | ▲▼ (Cambiar de grupo) ◄► (Cab/down/up) ENTER (Salir) ESC (Salir) | GRUPOS | ||||
| Lado de la cabina A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Lado de la cabina B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Pulsador hacia abajo en el lado A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Pulsador lado inferior B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Hacia arriba lado A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Hacia arriba lado B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Tarjetas AUX | Tarjetas Entradas/salidas AUX □ = Contacto abierto ■ = Contacto cerrado | ▲▼ (Cambiar de página) ENTER (Salir) ESC (Salir) | TARJETAS 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| TARJETAS 16 IO OUT | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| TARJETAS 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| Entradas BDU | Entradas BDU □ = Contacto abierto ■ = Contacto cerrado | ▲▼ (Cambiar página) ◄► (Cambiar grupo) ENTER (Salir) ESC (Salir) | Grupo: Puerta, Incendio, Llave 1, Llave 2, Llave 3, Llave 4. Para cada grupo, se muestra el estado del contacto para cada plan. |
||||
 Lista de registro de llamadas | Lista de registro de llamadas □ = Llamada no registrada ■ = Llamada registrada | ▲▼ (Cambiar de grupo) ◄► (Cab/down/up) ENTER (Salir) ESC (Salir) | Los mismos grupos que PUSHBUTTONS | ||||
| [0] Inicio = ... [1] Inicio = ... [2] Inicio = ... | Contadores de ejecución 0] parcial (reiniciable) 1] Total [2] Uso futuro | ◄► (Cambiar) ENTER (Reiniciar y salir) ESC (Salir) | La fecha mostrada se refiere a la última puesta a cero del contador parcial [0] | ||||
| Analógico | Medidas analógicas | ▲▼ (Cambiar de página) ESC (Salir) | 24 V = Fuente de alimentación VCAB = Absorciones de armarios y cabinas VMR = Absorciones de la BDU 24VB = Tensión de las baterías +5.0 V = Alimentación interna de la placa TAMB = Sensor de temperatura ambiente PWM = Salida de velocidad analógica |
||||
| Medidas del COT | Medidas analógicas | ▲▼ (Cambiar de página) ESC (Salir) | T_SHA = Temperatura del eje MAIN = Fuente de alimentación del COT COP_A = Absorciones del lado A del COP COP_B = Absorciones del lado B del COP |
||||
| Medidas COP | Medidas analógicas | ▲▼ (Cambiar de página) ESC (Salir) | MAIN_A = Fuente de alimentación del COP A MAIN_B = Alimentación del COP B T_CAR = Temperatura de la cabina |
||||
| Línea FLOORS | BDU Línea de comunicación | ENTER (Reiniciar) ESC (Salir) | Error: Número de error en las comunicaciones FER: Tasa de error de trama Fecha y hora del último reinicio |
||||
| Línea CAR | COT / COP Línea de comunicación | ENTER (Reiniciar) ESC (Salir) | Error: Número de error en las comunicaciones FER: Tasa de error de trama Fecha y hora del último reinicio |
||||
| Línea MTPX | MULTIPLEX Línea de comunicación | ▲▼ (Cambiar de página) ENTER (Reiniciar) ESC (Salir) | Error: Número de error en las comunicaciones FER: Tasa de error de trama Fecha y hora del último reinicio |
||||
| Modelo ELGO: | Diagnóstico de ELGO | ||||||
Parámetros de descripción de la tabla PLAYBOARD IN-OUT
| Entrada | Descripción |
|---|---|
| SE0 | Cadena de seguridad Inicio |
| SE1 | Cadena de seguridad contactos de seguridad en el foso |
| SE2 | Cadena de seguridad parte superior de la inspección de la cabina del ascensor Caja/parada |
| SE3 | Interruptor final de la cadena de seguridad, engranaje de seguridad, regulador de velocidad |
| SE4 | Cadena de seguridad puertas de pasillo contactos preliminares |
| SE5 | Cerraduras de cadena de seguridad para las puertas del vestíbulo |
| SE6 | Contactos de las puertas de la cabina del ascensor de la cadena de seguridad y dispositivo de predesconexión (81-21) |
| CCO CCOB | control de contactores de potencia |
| CISO | Monitorizar el relé ISO |
| TISO | Módulo de seguridad SM1 control |
| LE | Luz de emergencia (alimentación de la luz de la cabina del ascensor) |
| BFR | botón de cierre de la puerta |
| PCA | Función de prioridad de la cabina del ascensor |
| POM | Operaciones de los bomberos (interruptor de la llave del pasillo) |
| CPOM | Operaciones de los bomberos (interruptor de la llave del coche) |
| SUR | Control de sobrecarga |
| COM | Control de carga completa |
| HS | función fuera de servicio |
| ZP | señal de la zona de la puerta |
| RPH | Control de la secuencia de fases |
| REV REV1 REV2 | Función de inspección (sala de máquinas) Función de inspección (parte superior de la cabina) Función de inspección (PIT) |
| REM REM1 REM2 | Inspección arriba (sala de máquinas) Inspección arriba (parte superior de la cabina) Inspección arriba (PIT) |
| RED RED1 RED2 | Inspección hacia abajo (sala de máquinas) Inspección hacia abajo (parte superior de la cabina) Inspección hacia abajo (PIT) |
| TH1 TH2 | Control del sensor de temperatura del motor (aceite) |
| IEME | Emergencia (fallo en el suministro eléctrico) |
| PME | Selector PME (evacuación de emergencia) |
| AGH AGB | Interruptor de desaceleración superior Interruptor de desaceleración inferior |
| FAS FAI | Sensores de posición (sin sistema de posicionamiento por encoder) |
| E511 | Entrada opcional para el acceso al eje |
| BYPL BYPC | Seguridad de la puerta Selector de anulación |
| BRA | Botón de apertura de la puerta (entrada A) |
| CEA | Entrada de fotocélula A |
| FOA | Entrada del final de carrera de la puerta abierta A |
| FFA | Final de carrera de cierre de puerta entrada A |
| BRB | Botón de apertura de la puerta (entrada B) |
| CEB | Fotocélula de entrada B |
| FOB | Interruptor de fin de carrera de puerta abierta entrada B |
| FFB | Corsa fina chiusura (Porta B) |
| BR1 | Interruptor del monitor del freno 1 |
| BR2 | Interruptor del monitor del freno 2 |
| IN_A IN_D | Monitorizar el circuito UCM |
| Salida | Descripción |
|---|---|
| VHS | Salida - iluminación fuera de orden |
| RMV | Salida - comando de velocidad intermedia |
| BRK | Salida - Comando de freno |
| MTR | Salida - Comando del motor |
| YBRK | Salida - Orden de frenado (VVVF) |
| ISO | Salida - Comando de renivelación |
| RGV | Salida - comando de alta velocidad |
| RPV | Salida - comando de baja velocidad |
| RMO | Salida - comando de desplazamiento hacia arriba |
| RDE | Salida - comando de desplazamiento hacia abajo |
| LTMP | Salida - comando de luz de cabina de ascensor limitado en el tiempo |
| CAM | Salida - comando de rampa de retirada |
| OEM | Salida - comando de emergencia |
| CCF | Salida - Cortocircuito en la fase del motor |
| J20 | Salida - programable (conector J20) |
| DSA | Salida - desactivación de alarmas |
| 511B | Salida - Norma 511 Zumbador |
| 511L | Salida - Norma 511 Light |
| 212B | Salida - Norm 212 Buzzer |
| FLD | Salida - comando de flechas hacia abajo |
| FLM | Salida - comando de flechas hacia arriba |
| GNGD | Salida - comando gong ascendente |
| GNGM | Salida - comando de gong hacia abajo |
| BIP | Salida - Señalización BIP en la cabina |
| PWR | Comando de alimentación del módulo UCM |
| ENAB | Comando de habilitación del módulo UCM |
| ROA | Salida - orden de apertura de la puerta (entrada A) |
| RFA | Salida - orden de cierre de la puerta (entrada A) |
| ROB | Salida - orden de apertura de la puerta (entrada B) |
| RFB | Salida - orden de cierre de la puerta (entrada B) |
| L-RED | Señal del semáforo 81-20/21 |
| L-GREEN | Señal del semáforo 81-20/21 |
| BUZZER | Señal de zumbido para la derivación 81-20 |
Parámetros de descripción de la tabla VVVF IN-OUT
| Señal | Descripción |
|---|---|
| ES | Habilitación de la entrada digital (terminal de tornillo EN) |
| FWD | Entrada digital ascendente (terminal de tornillo FWD) |
| REV | Entrada digital descendente (terminal de tornillo REV) |
| X1 | Entrada digital de alta velocidad (terminal de tornillo X1) |
| X2 | Entrada digital de velocidad REV (terminal de tornillo X2) |
| X3 | Entrada digital de baja velocidad (terminal de tornillo X3) |
| X4 | Ingreso digital (morsetto X4) |
| X5 | entrada digital (terminal de tornillo X4) |
| X6 | Ingreso digital (morsetto X6) |
| X7 | Ingreso digital (morsetto X7) |
| X8 | Entrada digital de emergencia (terminal de tornillo X8) |
| 0,0 V | Entrada analógica VVVF (terminales 11-12) |
| Codificador | Entrada VVVF del codificador (bucle cerrado) |
| PRINCIPAL | Versión del firmware del VVVF |
| Y1 | Salida digital (terminal Y1) |
| Y2 | Salida digital (terminal Y2) |
| Y3 | Salida digital (terminal Y3) |
| Y4 | Salida digital (terminal Y4) |
| Y5A/C | Relés de mando de los frenos (terminal Y5) |
| 30 A/B/C | Relè (terminal 30 A/B/C) |
| ALM | Señalización de la alarma VVVF |
| RST | Restablecer VVVF |
| ACC | Aceleración |
| DEC | Desaceleración |
| Fout | Frecuencia de salida |
| Vout | Tensión de salida |
| Iout | Corriente de salida |
| Imax | Corriente de salida máxima |
Menú "Configuración"
| ----->>>>> | | ----->>>>> | Planta 0 - 12:30:56 < Configuración > |
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Operaciones temporales | Modo de funcionamiento temporal del sistema | ◄► (Elección) | No; Sí | No |
| Prueba | Para facilitar las comprobaciones y la puesta en marcha de la instalación. Para la descripción, consulte el anexo II. | |||
| ¿Código? | Protección con contraseña para acceder a la programación | ◄► (Cambiar caracteres) ▲▼ (Seleccionar caracteres) | 8 caracteres (0 - 9; A - Z; a - z ) | sin contraseña |
| Configuración | Tipo de configuración del cableado: -) Terminales de cableado estándar (coche y pisos); -) Comunicación en serie en la cabina del ascensor, 1 línea/conectores de piso en los pisos; -) Terminales de cable en la cabina del ascensor, comunicación en serie en los pisos (módulos BDU); -) Comunicación en serie para la cabina del ascensor y los pisos | ◄► (Elección) | Coche y Fl. STD; Coche SER. / Fl. RJ45; Coche STD. / Fl. BDU; Coche SER. / Fl. BDU | Coche SER / Fl. RJ45 |
| Tipo de control | Tipo de control para el ascensor | ◄► (Elección) | -SAPB; -SAPB registro -SAPB presión constante -Colectivo de bajada; -Colectivo completo; | SAPB; |
| Conduzca | Tipo de tracción: -) Tracción VVVF -) Hidráulica - Motor Directo (Dir): Se puede utilizar también en caso de VVF activada sólo en sentido ascendente. -) Hidráulico - Arranque suave del motor (S-S): -) Hidráulico - Estrella Delta del Motor (Y-D): -) Hidráulico - Motor con inversor (VVF): Los contactores del motor se activan en dirección ARRIBA y ABAJO. | ◄► (Elección) | Tracción Hidráulico Dir Hidráulico S-S Hidráulica Y-D Hidráulico VVF | Tracción |
| Número de pisos | Número de plantas de la instalación | ▲▼ (Aumento/Disminución) | 2 <-> 16 (estándar) 2 <-> 32 (sólo BDU) | 2 |
| Renivelación | No está presente: No hay renivelación Tipo 1: (abrir o cerrar la puerta). Este ajuste está indicado para instalaciones de tracción para una buena precisión de parada. La renivelación se activa cuando la cabina del ascensor abandona su posición "perfectamente en el suelo", es decir, cuando uno de los dos largueros se interrumpe. La renivelación termina cuando los dos largueros están libres. ATENCIÓN: este ajuste no es adecuado para las instalaciones hidráulicas debido al riesgo de efecto de "bombeo" (la cabina del ascensor se desplaza hacia abajo después de la parada) Tipo 2: (abrir o cerrar la puerta). Este ajuste está indicado para instalaciones hidráulicas y funciona como en el Tipo 1, salvo que los dos largueros deben interrumpirse antes de que comience la renivelación. La renivelación finaliza cuando los dos largueros están libres. ATENCIÓN: se sugiere el uso de sensores con distancia reducida entre largueros (TMS03 = 20 mm). Tipo 3: Nivelación 1 larguero puerta abierta 2 larguero puerta cerrada. Este ajuste permite la nivelación de 1 haz, puerta de piso abierta (luz de cabina encendida) y la nivelación de 2 haces, puerta de piso cerrada (luz de cabina apagada). ATENCIÓN: para accionar la puerta de nivelación abierta, sea cual sea la opción elegida, es necesario desviar la seguridad de la puerta, utilizando un sistema homologado. Nota: con el sistema de posicionamiento Encoder, se muestra la distancia de activación de la renivelación | ◄► (Elección) | No está presente Tipo 1 Tipo 2 Tipo 3 | No está presente |
| Piso principal | Posición de la planta principal (todas las llamadas por debajo de esta planta se atienden sólo hacia arriba (sólo colectivo hacia abajo) | ▲▼ (Aumento/Disminución) | 0 <-> Piso No. | 0 |
| Tiempo de fallo de baja velocidad | Tiempo antes de la activación del fallo de baja velocidad (velocidad baja demasiado larga) | ▲▼ (Aumento/Disminución) | 7 s <-> 40 s | 7 s |
| Duración | Tiempo antes de la activación del fallo de tiempo de funcionamiento | ▲▼ (Aumento/Disminución) | 20 s <-> 45 s | 20 s |
| Tipo de instalación | Tipo de instalación (Simplex / Multiplex / Multiplex LIGHT) Multiplex LIGHT tiene una línea BDU única compartida para dos ascensores con un cableado de sinalización dedicado. | ◄► (Elección) | Simplex; Multiplex; Multiplex LIGHT | Simplex |
| Configuración múltiplex | Configuración del múltiplex: Número de ascensor (LN); Línea de pulsadores (PBL); Pisos en múltiplex; Desplazamiento. Para la descripción, consulte las soluciones Multiplex. | ◄► (Seleccionar parámetro) ▲▼ (Cambiar valor) | - Nº de ascensor (LN): 1<->4 - Línea de pulsadores (PBL): 0(1 Línea)<->3(4 Líneas) | (LN).(PBL): 1.0 |
| - Pisos: 2 <-> 16 [32] - Ofst 0 <-> N° pisos | Pisos : 2 Ofst : 0 |
|||
| Multiplex Llamar a | En las instalaciones múltiplex se puede diferenciar una llamada de planta con una presión larga del botón (más de 3 segundos): a) La instalación con el parámetro "Número de ascensor (LN)" más bajo (por ejemplo, si hay una instalación dúplex con una cabina grande para pasajeros discapacitados y otra más pequeña, la mayor debe ponerse como "1" y la otra como "2"; b) En un sistema de "distribución asimétrica de pisos", la instalación que puede alcanzar el nivel más bajo/alto. | ◄► (Elección) | No (0, 1, 2, 3) Sí (0, 1, 2, 3) | No |
"Menú "Puertas
| ----->>>>> | | ----->>>>> | Planta 0 - 12:30:56 < Puertas > |
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Rampa de retorno en | Tiempo antes de la activación de la rampa de retirada | ▲▼ (Aumento/Disminución) | 0,1 s <-> 9,9 s | 0,1 s |
| Rampa de retorno apagada | Tiempo antes de la desactivación de la rampa de retirada | ▲▼ (Aumento/Disminución) | 0,1 s <-> 9,9 s | 0,1 s |
| Tiempo de fallo de la cerradura | Tiempo antes de la activación del fallo de la cerradura | ▲▼ (Aumento/Disminución) | 2 s <-> 60 s | 15 s |
| Retraso en la apertura de la puerta | Tiempo antes de la apertura de la puerta - para puerta automática | ▲▼ (Aumento/Disminución) | 0,1 s <-> 9,9 s | 0,5 s |
| Tiempo de aparcamiento con la puerta abierta | Tiempo de aparcamiento del ascensor con la puerta abierta (en seg.) | ▲▼ (Aumento/Disminución) | 1 s <-> 30 s | 7 s |
| Hora de cierre con llamadas | Tiempo (en seg.) antes de que la puerta se cierre en caso de llamadas registradas | ▲▼ (Aumento/Disminución) | 1 s <-> 60 s | 2 s |
| Puertas Nb. | Número y tipo de puertas | ◄► (Selección) | -1 puerta -2 puertas simult. -2 puertas sel. -2 puertas sel+pasar | 1 acceso |
| Tipo Puerta A | Selección del tipo de puerta para la entrada A: 1) Manual / No presente: puertas manuales en las plantas, puertas de cabina de ascensor manuales o no presentes; 2) Independiente de la cabina: puertas manuales en las plantas, puertas de la cabina del ascensor independientes; 3) Automática de cabina: puertas manuales en las plantas, puertas de cabina de ascensor automáticas; 4) Automático combinado: puertas automáticas en la cabina del ascensor y en los pisos | ◄► (Selección) | Manual / no presente; Coche independiente; Automático de coche; Auto combinado | Auto combinado |
| Puerta A con final de carrera | Presencia de un final de carrera para la puerta A (no existe para las puertas manuales e independientes) | ◄► (Selección) | No (NO) Sí (NO) Sí (NC) | No |
| Seleccione la puerta A en el piso | Configuración de la puerta A para cada planta: establecer el acceso a cada planta y abrir o cerrar el aparcamiento de la puerta en la planta (para puertas automáticas) | ◄► (Selección) ▲▼ (Cambio de piso) | No; Paquete. Cierre de puerta; Puerta del paquete Puerta abierta | Paquete. Cierre de la puerta; |
| Tiempo de apertura/cierre de la puerta A | Puerta A sin final de carrera: tiempo de apertura/cierre de la puerta | ▲▼ (Aumento/Disminución) | 1 s <-> 60 s | 10 s |
| Retraso de inicio de la puerta A | Manual de la puerta A: tiempo antes del inicio | ▲▼ (Aumento/Disminución) | 0,1 s <-> 9,9 s | 2,0 s |
| Puerta deslizante A | Puerta A con final de carrera: tiempo antes del fallo de deslizamiento | ▲▼ (Aumento/Disminución) | 1 s <-> 60 s | 10 s |
| Puerta A alimentada | Puerta A alimentada durante el recorrido. No se considera para puertas manuales o independientes | ◄► (Selección) | No Sí Sí AT40 | No |
| Tipo Puerta B | Selección del tipo de puerta para la entrada B (véase el tipo de puerta A): | ◄► (Selección) | Manual / no presente; Coche independiente; Automático de coche; Auto combinado | Auto combinado |
| Puerta B con final de carrera | Presencia de un final de carrera para la puerta A (no existe para las puertas manuales e independientes) | ◄► (Selección) | No; Sí | No |
| Seleccione la puerta B en el piso | Configuración de la puerta A para cada planta: establecer el acceso a cada planta y abrir o cerrar el aparcamiento de la puerta en la planta (para puertas automáticas) | ◄► (Selección) ▲▼ (Cambio de piso) | No; Paquete. Cierre de puerta; Puerta del paquete Puerta abierta | Paquete. Cierre de la puerta |
| Tiempo de apertura/cierre de la puerta B | Puerta B sin final de carrera: tiempo de apertura/cierre de la puerta | ▲▼ (Aumento/Disminución) | 1 s <-> 60 s | 10 s |
| Retraso de inicio de la puerta B | Puerta B manual: tiempo antes del inicio | ▲▼ (Aumento/Disminución) | 0,1 s <-> 9,9 s | 2,0 s |
| Puerta deslizante B | Puerta B con final de carrera: tiempo antes del fallo de deslizamiento | ▲▼ (Aumento/Disminución) | 1 s <-> 60 s | 10 s |
| Puerta B alimentada | Puerta B alimentada durante el recorrido. No se considera para puertas manuales o independientes | ◄► (Selección) | No Sí Sí AT40 | No |
| Apertura avanzada | Parámetro para la apertura avanzada de la puerta (la apertura comienza antes de la parada de la cabina del ascensor). | ◄► (Selección) | No; Sí | No |
| Tipo de fotocélula | Parámetro para seleccionar el tipo de fotocélula: Fotocélula NO: el contacto se abre si el haz está libre. El contacto se cierra si el haz se interrumpe. Los contactos de choque, de fotocélula y de puerta abierta deben estar cableados en paralelo. Fotocélula NC: al contrario que la fotocélula NO. Los contactos de choque, fotocélula y puerta abierta deben estar cableados en serie. NOTA: Los contactos de choque, fotocélula y puerta abierta deben ser todos del mismo tipo (NA o NC) | ◄► (Selección) | NO; NC | No |
| Tiempo de contacto de la puerta | Tiempo de espera antes de iniciar un viaje (para el contacto de seguridad de la puerta vieja) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,1 s |
"Menú "Señales
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Señales > |
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Prioridad del coche | Tiempo de la cabina del ascensor en el piso sin dirección antes de tomar las llamadas de aterrizaje. En caso de puertas automáticas combinadas, la temporización comienza cuando las puertas se han cerrado y los contactos de choque, fotocélula y reapertura no están activados | ▲▼ (Aumento/Disminución) | 2 s <-> 30 s | 10 s |
| Registro de llamadas de planta | Establecer el parpadeo de los botones del suelo al registrarse | ◄► (Selección) | Permanente; Tapajuntas en suelos | Permanente |
| Salida AUX | Selección del tipo de salida en las tarjetas de 16 relés. NOTA: Las configuraciones de 1 hilo/suelo y 1 hilo/suelo HYD están disponibles sólo en la primera tarjeta 16RL. Después de la configuración de las dos tarjetas AUX se pueden configurar las salidas en BDU (OUT-1 y OUT-2). | ◄► (Selección) ▲▼ (Cambiar valor) | 1 cable por piso; Coche en el piso; Luz de piso; Indicador gris; Indicador de 9 segmentos; El ascensor está llegando; 1 cable por piso HYD | 1 cable por piso |
| Entradas de la BDU Tipo 0 = Coche en el suelo y fuera de servicio Tipo 1 = Flechas Tipo 2 = Coche en el suelo y Viene un coche Tipo 3 = Pantalla de 3 cables | Tipo 0 Tipo 1 Tipo 2 Tipo 3 | Tipo 0 | ||
| Designación automática del suelo | Ajuste automático de los caracteres numéricos para los indicadores de posición en serie. El valor aumenta/disminuye automáticamente en cada piso empezando por el más bajo | ▲▼ (Aumento/Disminución) | -9 <-> 30 | Fl. más bajo: 0 |
| Designación manual del suelo | Ajuste manual de los caracteres alfanuméricos para los indicadores de posición en serie. El ajuste debe hacerse para cada planta | ◄► (Selección) ▲▼ (Cambiar valor) | - ; 0 <-> 9 ; A <-> Z | |
| Disparo en PV | Es posible iniciar el disparo (sintetizador de voz / flechas de dirección siguiente) en el punto de desaceleración (Sí) o a la llegada al suelo (No). | ◄► (Selección) | No sí | No |
| Flechas de dirección siguientes | En caso de activación del parámetro, las salidas de flecha se activan sólo cuando el ascensor se detiene en el suelo (o al frenar si el parámetro de activación en PV está activo). | ◄► (Elección) | No sí | No |
| Retraso de LTMP | Esta función maneja el retardo entre una llamada de piso/ cabina de ascensor y el encendido de la luz. La salida se desactiva XX segundos después de que se haya atendido la llamada. 0 segundos significa que no hay temporizador activo (luz encendida) | ▲▼ (Aumento/Disminución) | 0 s <-> 240 s | 1 segundo. |
| Retraso EME | Esta función gestiona el retardo entre la señal de apagón (IEME) y la orden de salida (OEME) antes de la conmutación del sistema en el procedimiento automático de emergencia. | ▲▼ (Aumento/Disminución) | 0 s <-> 30 s | 0 seg. |
| Buzzer 81-21 | Para la instalación del 81-21: utilizar el zumbador acústico del 81-20 (puerta de bypass) en la parte superior de la cabina del ascensor como alarma acústica cuando las protecciones no están en posición activa. | ◄► (Elección) | No sí | No |
Menú "Características especiales"
| ----->>>>> | | ----->>>>> | Planta 0 - 12:30:56 < Características especiales > |
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Reiniciar en | Sentido de la marcha durante el procedimiento de restablecimiento | ◄► (Selección) | 2 s <-> 30 s | 10 s |
| Límites de desplazamiento en la inspección | Válido sólo para el sistema de posicionamiento FAI/FAS. Configuración de los límites de desplazamiento durante el modo de inspección. Si se programa el desplazamiento más allá de los límites, el controlador no permite ningún movimiento más allá de los pisos superiores/inferiores. | ◄► (Selección) | Permanente; Parpadeo en los pisos | Permanente |
| Bomberos | (Consulte el procedimiento de programación de operaciones contra incendios) Tipo de operaciones de bomberos (si las hay) y parámetros pertinentes (nivel y lado de acceso del servicio de bomberos, tipo de contacto de la llave POM y CPOM); elección de la norma aplicable pertinente: -) Norma NF P82-207 (Francia); -) Norma EN 81-72 (a): sin interruptor de llave FF de cabina de ascensor; -) EN 81-72 (b): con interruptor de llave FF de cabina de ascensor; | ◄► (Seleccionar campo) ▲▼ (Cambiar valor) | No está presente; NF P82-207; EN 81-72 (a); EN 81-72 (b) EN 81-73 DM 15/09/2005 (IT) | No está presente |
| Detección de incendios | Parámetro para la detección de incendios en los pisos. Cuando se detecta un incendio - si el ascensor se encuentra en una planta diferente a la que se ha detectado el incendio, se cancelan todas las llamadas registradas desde/hacia esta planta; - si el ascensor se encuentra en la planta en la que se ha detectado el incendio, el controlador bloquea la apertura de las puertas, las cierra (si están abiertas al detectar el incendio) y envía la cabina del ascensor a una planta segura | ◄► (Selección) | No; Sí | No |
| Registro del botón de parada | El sistema registra el modo fuera de servicio (presión del botón STOP). También es posible configurar el retardo para evitar el movimiento simultáneo en instalaciones alimentadas con un generador. | ◄► (Selección) | No; Sí | No |
| EN 81-20 | Ajuste del sistema según EN 81-20 | ◄► (Selección) | No; Sí | No |
| Fallo antirreglamentario | Parámetro para la detección de la avería antinuclear (número de paradas sin activación de la fotocélula tras las cuales se anulan todas las llamadas de cabina del ascensor) | ◄► (Selección) ▲▼ (Sin llamadas) | No; Sí 2 <-> 10 | No 3 |
| Piso fuera de servicio | Piso para fuera de servicio. Piso de estacionamiento cuando la entrada HS está habilitada. | ▲▼ (Aumento/Disminución) | 0 <-> Piso No: | 0 |
| Retorno automático | Parámetros para el retorno automático de la cabina del ascensor en el piso: Planta de retorno y Tiempo mínimo de espera antes del retorno automático | ◄► (Seleccionar parámetro) ▲▼ (Cambiar valor) | No 0 <-> Piso No: 1 minuto <-> 60 minutos | No 0 15 min. |
| Zonas de retorno | Ajustes avanzados para el retorno al piso a las horas / días previstos: -) Día (0 = todos los días, 1 = lunes ... 7 = domingo); -) Intervalo de tiempo seleccionado (4 intervalos cada día); -) Planta de retorno; -) Hora de inicio; -) Hora de finalización (tiempo máximo: 7h 45 min); | ◄► (Seleccionar parámetro) ▲▼ (Cambiar valor) | ||
| R. tiempo de la zona | Horario de las zonas de retorno seleccionadas | ◄► (Selección) ▲▼ (Cambiar valor) | No; Sí 1 s <-> 120 s | No 60 s |
| Borrado de llamadas en el suelo | Borrado de todas las llamadas en la planta donde se detiene la cabina del ascensor, sin control de la dirección (sólo para instalaciones colectivas completas) | ◄► (Selección) | No; Sí | No |
| Control de la deriva (FR) | Control de la deriva (Francia) | ◄► (Selección) | No está presente; Tracción; Máquina de tambor | Ninguno |
| Código del pulsador | Permite programar un código de 4 dígitos para las llamadas de cabina de ascensor. Se puede asignar un código de 4 dígitos a cada entrada del pulsador de cabina del ascensor BCx, correspondiente a las entradas de los pulsadores de cabina del ascensor. Ejemplo: si el pulsador BC0 está asociado al código 0123, para reservar la planta 0 de la cabina se puede a) mantener pulsado el pulsador de planta 0 durante 3 segundos. b) Todos los pulsadores COP parpadearán c) Presionar secuencialmente los pulsadores correspondientes a la BC0, BC1, BC2, BC3; Nota: Introduzca un código entre 0 y 9 correspondiente a las entradas BC0 ÷ BC9 El código de programación "0 " habilitará la función especial Pent House | ◄► (Seleccionar campo) ▲▼ (Cambiar valor) | ||
| Control de la temperatura ambiente | Compruebe la temperatura en la sala de máquinas a través del sensor (si está presente). Si la temperatura supera los umbrales establecidos durante más de 30 segundos, el sistema se detiene en el suelo y se registra el error. El control sólo está activo durante el funcionamiento normal o la prioridad de la cabina. Después de haber ajustado los dos umbrales, pulsando Enter se puede realizar la calibración del sensor (pulse inmediatamente Enter para conservar la calibración actual, de lo contrario ajuste el valor de la temperatura ambiente y luego pulse Enter). El primer umbral se puede establecer entre -10 ° C y +5 ° C, mientras que el segundo umbral se puede establecer entre +40 ° C y +75 ° C. | ◄► (Seleccionar campo) ▲▼ (Cambiar valor) | Without; +5°C <=> +40°C | Sin |
| Automático Llamadas | Cuando el ascensor está en modo normal, se puede activar la función "Llamadas automáticas" para realizar un número determinado de llamadas (hasta 120 llamadas o ilimitadas) en pasos de un minuto. Sin embargo, es posible habilitar o no la funcionalidad de las puertas (el sistema también seguirá aceptando llamadas de planta simulando las llamadas programadas, si está habilitada). La función finaliza automáticamente cuando se apagan las máquinas o si el sistema se pone en modo de inspección. | ▲▼ (Aumentar/disminuir ◄► (Seleccionar puertas) | 0 <-> 120 ∞ 10 <-> 60 s Sí - No | 0 60s Sí |
| Monitorizar la UCM | Enmienda A3. Configure el tipo de monitor. Para la descripción, consulte el circuito UCM. | ▲▼ (Aumentar/Disminuir) ◄► (Elección) | ||
| UCM | Instalación tipo 81-1 / 81-20 / 81-21 Procedimiento de acceso al eje y protecciones. Para la descripción, consulte el circuito UCM. | ▲▼ (Aumentar/Disminuir) ◄► (Elección) | ||
| Parada forzada | Si se programa, la instalación se detendrá en un piso específico en cada cruce (algunos hoteles utilizan esta función). | ▲▼ (Aumentar/Disminuir) ◄► (Elección) | ||
| Proteger el suelo | Si se programa una planta protegida, cuando la cabina del ascensor llega a la planta, la puerta no se abre, en su lugar el monitor mostrará imágenes procedentes de la cámara correspondiente a esa planta. Las puertas sólo pueden abrirse pulsando el botón de ABRIR PUERTA; si esto no ocurre, el ascensor se desplaza a la planta anterior y entonces deja de funcionar el modo de planta protegida (este modo de funcionamiento sólo es posible con el sistema de monitorización de DMG). | ▲▼ (Aumentar/Disminuir) ◄► (Elección) | ||
| Prioridad Lop | Habilitación de la función de llamada prioritaria de planta. emparejamiento con tarjeta 16 IN (o entradas de llave de BDU) | ◄► (Elección) | No; Sí | No |
| Habilitar suelo | Habilitación de la función de habilitación de llamadas (por ejemplo, lector de tarjetas). En combinación con la tarjeta 16 IN. Tipo 1: habilitación LOP: para habilitar las llamadas, la entrada correspondiente de la tarjeta 16 IN debe estar cerrada. Tipo 2: Habilitación COP: para habilitar las llamadas, la entrada correspondiente de la tarjeta 16 IN debe estar cerrada Tipo 3: Habilitar COP + LOP: para habilitar las llamadas, la entrada correspondiente de la tarjeta 16 IN debe estar cerrada (deshabilitando el piso) | ▲▼ (Aumentar/Disminuir) ◄► (Elección) | No Tipo 1 Tipo 2 Tipo 3 | No |
| Protección del eje | Protección del compartimento y de las puertas. Para la descripción, consulte la protección del eje. | ▲▼ (Aumento/Disminución | No Tipo 1 Tipo 2 Tipo 3 Tipo 4 | No |
| Pesaje de cargas integrado | Habilitar la función de pesaje de carga integrada. Es obligatorio un procedimiento de calibración(Prueba 22) | ◄► (Seleccionar campo) | No; Sí | No |
"Menú "Posicionamiento del sistema
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Posicionamiento > |
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Sistema de posicionamiento | Tipo de sistema de posicionamiento: con Encoder o tradicional. Sólo se puede modificar en Oper. Temporal. Mode Nota: en caso de Encoder absoluto y longitudes de eje superiores a 65 metros cambiar la resolución de Encoder = 2 en el menú de autoajuste antes de iniciar el procedimiento de Teach manual. | ◄► (Selección) | FAI/FAS; Codificador en el sentido de las agujas del reloj; Encoder Antihorario Encoder ELGO | FAI/FAS |
| Top PV | Posición de la desaceleración (paso en Baja Velocidad) y número de entradas | ▲▼ (Aumento/Disminución) | 2 <-> 6 | 5 |
| FV en los pisos | Posición de la desaceleración específica para cada piso | ◄► (PV superior) ▲▼ (Opción de piso) | Piso corto o 2<->6 0 <-> No. Piso | 5 todos los pisos |
| Retraso de nivel corto | Tiempo antes de la desaceleración del nivel corto (sólo si se programa un nivel corto) | ▲▼ (Aumento/Disminución) | 0,00 s <-> 2,50 s | 0,00s |
| Retraso en la parte superior de PV 2 | Retraso antes de pasar a velocidad intermedia | ▲▼ (Aumento/Disminución) | 0,00 s <-> 2,50 s | 0,00s |
| Retraso Dir.-BRK | VVVF: Retraso entre la activación del sentido de la marcha y la orden de marcha (BRK) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Otros |
| OLEO: Retraso en el Star / Delta | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Estrella/Delta 0,0 s - Otros |
|
| Retraso BRK-S | Retraso entre la activación del comando BRK y el comando de velocidad | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,00 s |
| Retraso BRK-Dir. | Retraso entre la desactivación de la orden de marcha y la desactivación del sentido de la marcha (llegar al piano) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Otros |
| Velocidad de inspección | Establece la velocidad de desplazamiento en la inspección | ◄► (Selección) | Baja velocidad; Alta velocidad | Baja velocidad |
| Emergencia BRK On | Parámetro de modulación de interrupción de emergencia (modificar sólo si la tarjeta EME no está presente) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 5,0 s | 0,0s |
| Emergencia BRK Off | Parámetro de modulación de interrupción de emergencia (modificar sólo si la tarjeta EME no está presente) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 5,0 s | 0,0s |
Tabla de parámetros: (Sistema de posicionamiento del codificador):
| Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|
| Sistema de posicionamiento | Tipo de sistema de posicionamiento: con Encoder o tradicional. Nota: Sólo se puede modificar en el modo Operativo Temporal. | ◄► (Selección) | Encoder sentido horario; Encoder sentido antihorario Encoder ELGO | Codificador en el sentido de las agujas del reloj |
| Autosetting | Inicio del procedimiento de autoaprendizaje de la posición del suelo. Sólo se puede modificar en el modo de funcionamiento temporal. | ◄► (Selección) | No; Sí | No |
| Posición en el suelo | Valor de la posición de cada planta | ▲▼ (Aumento/Disminución) ◄► (Selección) | ||
| Accel. Tiempo | Tiempo de aceleración. Tiempo necesario para pasar de la velocidad inicial a la velocidad de desplazamiento. | ▲▼ (Aumento/Disminución) | 1,0 s <-> 5,0 s | 3,0 s |
| Impulso inicial | Velocidad inicial | ▲▼ (Aumento/Disminución) | 0 s <-> 10 s | 3 % |
| Parar el impulso | Velocidad final (de parada) | ▲▼ (Aumento/Disminución) | 0 s <-> 10 s | 4 % |
| Velocidad máxima | Velocidad máxima durante el recorrido | ▲▼ (Aumento/Disminución) | 5 s <-> 100 s | 100 % |
| Velocidad de inspección | Velocidad de desplazamiento en modo de inspección | ▲▼ (Aumento/Disminución) | 5 s <-> 100 s | 50 % |
| Velocidad AGB/AGH | Velocidad de circulación en los puntos límite AGB/AGH. La misma velocidad adoptada durante las operaciones de emergencia | ▲▼ (Aumento/Disminución) | 1 s <-> 15 s | 10 % |
| Retraso Dir.-BRK | VVVF: Retraso entre la activación del sentido de la marcha y la orden BRK (inicio) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Otros |
| OLEO: Retraso en el Star / Delta | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Estrella/Delta 0,0 s - Otros |
|
| Retraso BRK-S | Retraso entre la activación del comando BRK y el inicio de la rampa de velocidad analógica | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Otros |
| Retraso BRK-Dir. | Retraso entre la desactivación de la orden de marcha y la desactivación del sentido de la marcha (parada en el suelo) | ▲▼ (Aumento/Disminución) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Otros |
| Emergencia BRK On | Parámetro de modulación de la pausa de emergencia | ▲▼ (Aumento/Disminución) | 0,0 s <-> 5,0 s | 0,0s |
| Emergencia BRK Off | Parámetro de modulación de la pausa de emergencia | ▲▼ (Aumento/Disminución) | 0,0 s <-> 5,0 s | 0,0s |
| Monitorear el codificador | Contiene información sobre: Características del codificador, lectura de las alturas de ralentización (R1D / R1S), renivelación (RRIPD / RRIPS) y parada de la cabina (RLD / RLS) donde la D indica bajada mientras la S significa subida; finalmente contiene información sobre la lectura de las alturas AGB / AGH y ZP. Nota: Las alturas R1D y R1S pueden modificarse pulsando Enter sin repetir el procedimiento de autoaprendizaje (para que la distancia de ralentización sea igual en subida y en bajada). | |||
| Zona de la puerta | Longitud de la zona de la puerta ZP en mm |
NOTA: Por favor, consulte el diagrama de tiempos al final de este manual, para entender mejor el significado de algunos parámetros.
"Menú "VVVF
Este menú sólo está disponible cuando un FUJI FRENIC LIFT VVVF está conectado a una tarjeta de control del ascensor.
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < VVVF > |
| Cod. | Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|---|
| F03 | Velocidad máxima | Velocidad máxima del motor | ◄► (Selección) ▲▼ (Cambiar valor) | 150-3600 RPM | 1500 RPM |
| F05 | Tensión nominal | Tensión nominal del motor accionado por el inversor | ◄► (Selección) ▲▼ (Cambiar valor) | 80-240 V (para las series de clase 200V) | 230 V |
| 160-500 V (para series de clase 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa de aceleración (Sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-99,9 s | 1,8 s |
| F08 | Diciembre T2 | Rampa de aceleración (Sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-99,9 s | 1,8 s |
| F42 | Modo de control | Modo de control | ◄► (Selección) ▲▼ (Cambiar valor) | 0-1-2 | 0 (Accionamientos con engranajes, bucle cerrado) 1 (Accionamientos sin engranajes, bucle cerrado) 2 (Accionamientos con engranajes, bucle abierto) |
| E12 | Acc/dec T5 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selección) ▲▼ (Cambiar valor) | 0.00 - 99.9 s | 1,8 s | |
| C07 | Velocidad de fluencia | Velocidad de arrastre (Sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 4,0 Hz (Accionamientos de engranaje, bucle abierto) 2,5 Hz (Reductores, bucle cerrado) 1,5 Hz (Accionamientos sin engranajes, bucle cerrado) |
|
| C10 | Velocidad media | Velocidad del sistema en modo de inspección (sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 25 Hz (Accionamientos por engranajes) 10 Hz (Accionamientos sin engranajes) |
|
| C11 | Alta velocidad | Alta velocidad para el cambio de velocidad en varios pasos (sólo con el sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 50 Hz (Accionamientos por engranajes) 20 Hz (Accionamientos sin engranajes) |
|
| P01 | Polos de motor | Número de polos del motor | ◄► (Selección) ▲▼ (Cambiar valor) | Ver placa del motor | 4 (Accionamientos por engranajes) 20 (Accionamientos sin engranajes) |
| P02 | Tapa nominal del motor | Potencia nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | Ver placa del motor | Función del tamaño del inversor |
| P03 | Cur. nominal del motor | Intensidad nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | Ver placa del motor | Función del tamaño del inversor |
| P04 | Autotuning del motor | Sintonización automática de los parámetros del motor (sólo accionamientos con reductor) | ◄► (Selección) ▲▼ (Cambiar valor) | 0 (2 para activar el procedimiento de autoajuste para los accionamientos de engranajes) | |
| P06 | M-No-Load Curr. | Corriente en vacío del motor | ◄► (Selección) ▲▼ (Cambiar valor) | Ajustado por el Autotuning del motor (Accionamientos con reductor) 0 A (Accionamientos sin engranajes) |
|
| P12 | Slip con clasificación M | Frecuencia de deslizamiento nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | 0-15Hz | Ajustado por el Autotuning del motor |
| L01 (*) | Selección PG | Ver ajuste del ascensor VVVF Frenic | ◄► (Selección) ▲▼ (Cambiar valor) | 0-5 | 0 (Accionamientos por engranajes) 4 (Accionamientos sin engranajes con codificador EnDat) 5 (Accionamientos sin engranajes con codificador sin-cos) |
| L02 (*) | Resolución PG | Resolución del codificador de pulsos (Pulso/ Vuelta) | ◄► (Selección) ▲▼ (Cambiar valor) | 360-60000 P/R | 1024 (Accionamientos con reductor) 2048 (Accionamientos sin engranajes) |
| L19 | Curva S 1 | Curva S - 1 | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L24 | Curva S 6 | Curva S - 6 | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L25 | Curva S 7 | Curva S - 7 | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L26 | Curva S 8 | Curva S - 8 | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L27 | Curva S 9 | Curva S - 9 | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L82 | Retraso en la activación del freno | Retraso desde la activación de la salida BRKS | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10,00 S | 0,20 s |
| L83 | Retraso en la desactivación de los frenos | Retraso desde la desactivación de la salida BRKS | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10,00 S | 0,10 s |
(*) - No disponible en el modelo de inversor LM2C.
| Cod. | Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|---|
| F01 | Orden de velocidad | Selección de comandos para la variación de la velocidad | ◄► (Selección) ▲▼ (Cambiar valor) | 0=MULTIPASO 1=NR Analógico (no polarizado) no disponible | 0 (con sistema de posicionamiento FAI/FAS) 1 (con sistemas de posicionamiento Encoder) |
| F03 | Velocidad máxima | Velocidad máxima del motor | ◄► (Selección) ▲▼ (Cambiar valor) | 150-3600 RPM | 1500 RPM |
| F04 | Velocidad nominal | Velocidad nominal del motor (frecuencia) | ◄► (Selección) ▲▼ (Cambiar valor) | 50 Hz | |
| F05 | Tensión nominal | Tensión nominal del motor accionado por el inversor | ◄► (Selección) ▲▼ (Cambiar valor) | 80-240 V (para las series de clase 200V) | 230 V |
| 160-500 V (para series de clase 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa de aceleración (sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-99,9 s | 1,8 s |
| F08 | Diciembre T2 | Rampa de desaceleración (sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-99,9 s | 1,8 s |
| F09 | Refuerzo de TRQ | Aumento del par motor | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0-5,0 | 0,0 (hasta 7,5 kW y a partir de 30 kW) 0,3 (de 11 kW a 22 kW) |
| F10 | OL electrónico | Protección eléctrica contra sobrecargas | ◄► (Selección) ▲▼ (Cambiar valor) | 1 - 2 | 2 |
| F11 | Nivel de sobrecarga | Protección electrónica de sobrecarga térmica del motor (valor en amperios igual al tamaño del inversor) | ◄► (Selección) ▲▼ (Cambiar valor) | 1 a 200% de la corriente nominal | 100 % |
| F12 | Tiempo de sobrecarga | Constante de tiempo térmica | ◄► (Selección) ▲▼ (Cambiar valor) | 0,5 - 75,0 min. | 0,5 |
| F20 | DC Velocidad del freno | Umbral de frecuencia para la INYECCIÓN de CC | ◄► (Selección) ▲▼ (Cambiar valor) | 0,2 Hz (Bucle abierto) 0,0 Hz (Bucle cerrado) |
|
| F21 | Nivel de freno DC | Umbral de intensidad para la INYECCIÓN de CC | ◄► (Selección) ▲▼ (Cambiar valor) | 50 % (Bucle abierto) 0 % (Bucle cerrado) |
|
| F22 | Freno DC T | Tiempo de inyección de CC | ◄► (Selección) ▲▼ (Cambiar valor) | 1,0 s (Bucle abierto) 0,0 s (Bucle cerrado) |
|
| F23 | Velocidad inicial | Velocidad de arranque (en Hz) para el inversor | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-150 | 0,50 Hz (Bucle abierto) 0,00 Hz (Bucle cerrado) |
| F24 | Tiempo de espera | Tiempo de funcionamiento a la velocidad de arranque del inversor | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10 s | 0,8 s (FAI/FAS) 0,2 s (Codificador) |
| F25 | Velocidad de parada | Velocidad de parada (en Hz) para el inversor | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0 Hz (FAI/FAS) 0,1 Hz (codificador) |
|
| F26 | Sonido del motor | Frecuencia de la portadora | ◄► (Selección) ▲▼ (Cambiar valor) | 15 kHz | |
| F42 | Modo de control | Modo de control | ◄► (Selección) ▲▼ (Cambiar valor) | 0-1-2 | 0 (Accionamientos por engranajes, bucle cerrado) 1 (Accionamientos sin engranajes, bucle cerrado) 2 (Accionamientos con engranajes, bucle abierto) |
| F44 | Limitador de corriente | Nivel de activación del limitador de corriente. Si el valor es 999, significa que no hay limitación de corriente | ◄► (Selección) ▲▼ (Cambiar valor) | % a la corriente nominal del inversor | 200 % |
| E04 | Comando X4 | Entrada X4 no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 25 | |
| E05 | Comando X5 | Entrada X5 no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 25 | |
| E06 | Comando X6 | Entrada X6 no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 25 | |
| E07 | Comando X7 | Entrada X7 no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 25 | |
| E08 | Comando X8 | Entrada X8 no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 63 | |
| E10 | Acc/dec T3 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E11 | Acc/dec T4 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E12 | Acc/dec T5 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E14 | Acc/dec T7 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selección) ▲▼ (Cambiar valor) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00 -99,9 s | 1,8 s | |
| E20 | Señal Y1 | Salida Y1 (transistor) no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 27 | |
| E21 | Señal Y2 | Salida Y2 (transistor) no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 27 | |
| E22 | Señal Y3 | Salida Y3 (transistor) no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 27 | |
| E23 | Señal Y4 | Salida Y4 (transistor) no utilizada | ◄► (Selección) ▲▼ (Cambiar valor) | 25 | |
| E30 | Velocidad Arr. Hyst | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | 0,48 Hz (Motorreductor) 0,1 Hz (Motor sin engranajes) |
|
| E31 | Velocidad Det.Lev | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | 48,33Hz | |
| E32 | Velocidad Det Hyst | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | 0,48 Hz (Motorreductor) 0,1 Hz (Motor sin engranajes) |
|
| E39 | Nivel de RRD | Dirección recomendada en caso de emergencia (No se utiliza) | ◄► (Selección) ▲▼ (Cambiar valor) | 0% | |
| E61 | Entrada analógica 12 | Función de la entrada analógica 12 | ◄► (Selección) ▲▼ (Cambiar valor) | 0-2 | 1 |
| E98 | Comando FWD | Función para el terminal de tornillo FWD | ◄► (Selección) ▲▼ (Cambiar valor) | 98 | |
| E99 | Comando REV | Función para el terminal de tornillo REV | ◄► (Selección) ▲▼ (Cambiar valor) | 99 |
| Cod. | Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Limitación del par en caso de emergencia (el valor 999 significa que el límite es como F44) | ◄► (Selección) ▲▼ (Cambiar valor) | 0 | |
| C02 | BATRY TL T | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0 s | ||
| C03 | Velocidad de la batería | Velocidad durante la marcha de emergencia | ◄► (Selección) ▲▼ (Cambiar valor) | 1,50 Hz | |
| C07 | Velocidad de fluencia | Velocidad de arrastre (sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 4,0 Hz (Accionamientos de engranaje, bucle abierto) 2,5 Hz (Reductores, bucle cerrado) 1,5 Hz (Accionamientos sin engranajes, bucle cerrado) |
|
| C10 | Velocidad media | Velocidad del sistema en modo de inspección (sólo con sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 25 Hz (Accionamientos por engranajes) 10 Hz (Accionamientos sin engranajes) |
|
| C11 | Alta velocidad | Alta velocidad para el cambio de velocidad en varios pasos (sistema de posicionamiento FAI/FAS) | ◄► (Selección) ▲▼ (Cambiar valor) | 50 Hz (Accionamientos por engranajes) 20 Hz (Accionamientos sin engranajes) |
|
| P01 | Polos de motor | Número de polos del motor | ◄► (Selección) ▲▼ (Cambiar valor) | (ver placa del motor) | 4 (Accionamientos por engranajes) 20 (Accionamientos sin engranajes) |
| P02 | Tapa nominal del motor | Potencia nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | (ver placa del motor) | Función del tamaño del inversor |
| P03 | Cur. nominal del motor | Intensidad nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | (ver placa del motor) | Función del tamaño del inversor |
| P04 | Autotuning del motor | Sintonización automática de los parámetros del motor (sólo accionamientos con reductor) | ◄► (Selección) ▲▼ (Cambiar valor) | 0 (2 para activar el procedimiento de autoajuste para los accionamientos de engranajes) | |
| P06 | M-No-Load Curr. | Corriente en vacío del motor | ◄► (Selección) ▲▼ (Cambiar valor) | Ajustado por el Autotuning del motor (Accionamientos con reductor) 0 A (Accionamientos sin engranajes) |
|
| P07 | M-%R1 | Motor (%R1) | ◄► (Selección) ▲▼ (Cambiar valor) | Ajustado por el Autotuning del motor (Accionamientos con reductor) 5 % (Accionamientos sin engranajes) |
|
| P08 | M-%X | Motor (%X) | ◄► (Selección) ▲▼ (Cambiar valor) | Ajustado por el Autotuning del motor (Accionamientos con reductor) 10 % (Accionamientos sin engranajes) |
|
| P09 | Conducción M-Slip | Ganancia de compensación de deslizamiento en porcentaje respecto al deslizamiento nominal (P12) en los lados de accionamiento | 0,0 - 200% | Ajustado por el Autotuning del motor | |
| P10 | Freno M-Slip | Ganancia de compensación de deslizamiento en porcentaje respecto al deslizamiento nominal (P12) en los lados de frenado | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0 - 200% | Ajustado por el Autotuning del motor |
| P11 | M-Slip T | Valor del tiempo de compensación de deslizamiento (fijo) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,2 s | |
| P12 | Slip con clasificación M | Frecuencia de deslizamiento nominal del motor | ◄► (Selección) ▲▼ (Cambiar valor) | 0 - 15 Hz | Ajustado por el Autotuning del motor |
| H04 | Reinicio automático Tiempos | Reinicio automático (número de veces) | ◄► (Selección) ▲▼ (Cambiar valor) | 10 | |
| H05 | Auto reset int | Reinicio automático (intervalo de reinicio) | ◄► (Selección) ▲▼ (Cambiar valor) | 5 s | |
| H06 | Ventilador CTRL | Retraso en el apagado del ventilador de refrigeración (el valor 999 significa que no hay límite en el control del ventilador; el ventilador siempre está encendido) | ◄► (Selección) ▲▼ (Cambiar valor) | 5 minutos | |
| H57 | Curva S 11 | Curva a S-11 | ◄► (Selección) ▲▼ (Cambiar valor) | 0 - 50% | 20% |
| H58 | Curva S 12 | Curva a S-12 | ◄► (Selección) ▲▼ (Cambiar valor) | 0 - 50% | 20% |
| H64 | Tiempo de retención del cero | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0 s (con sistema de posicionamiento FAI/FAS) 0,8 s (con sistemas de posicionamiento Encoder) |
||
| H65 | Tiempo de arranque suave | ◄► (Selección) ▲▼ (Cambiar valor) | 0,0 s (con sistema de posicionamiento FAI/FAS) 0,0 s (con sistemas de posicionamiento Encoder) |
||
| H67 | Tiempo de retención de la parada | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00 s (Bucle abierto) 1,00 s (Bucle cerrado) |
||
| H96 | Monitor de frenos | Habilitar el control de los frenos | ◄► (Selección) ▲▼ (Cambiar valor) | 0-1 | 0 |
| H190 | Pedido de motor UVW | Secuencia de uso del motor | ◄► (Selección) ▲▼ (Cambiar valor) | 0-1 | 1 |
| Cod. | Parámetro | Descripción | Navegación | Valores | Valor por defecto |
|---|---|---|---|---|---|
| L01 (*) | Selección PG | Ver ajuste del ascensor VVVF Frenic | ◄► (Selección) ▲▼ (Cambiar valor) | 0-5 | 0 (Accionamientos por engranajes) 4 (Accionamientos sin engranajes con codificador EnDat) 5 (Accionamientos sin engranajes con codificador sin-cos) |
| L02 (*) | Resolución PG | Resolución del codificador de pulsos (Pulso/ Vuelta) | ◄► (Selección) ▲▼ (Cambiar valor) | 360-60000 P/R | 1024 (Accionamientos con reductor) 2048 (Accionamientos sin engranajes) |
| L03 (*) | P.P.Tuning | Ver ajuste del ascensor VVVF Frenic | ◄► (Selección) ▲▼ (Cambiar valor) | ||
| L04 (*) | P.P.Offset | Desplazamiento de la posición del polo magnético (ángulo de desplazamiento) para accionamientos sin engranajes | ◄► (Selección) ▲▼ (Cambiar valor) | Se ajusta automáticamente durante el ajuste de la posición de la pole (L03) | |
| L05 (*) | Ganancia ACR P | ◄► (Selección) ▲▼ (Cambiar valor) | 1,5 | ||
| L19 | Curva S 1 | L19 a L28 especifican las zonas de la curva S que se aplicarán a las operaciones accionadas por comandos de velocidad de varios pasos con aceleración/desaceleración de la curva S. | ◄► (Selección) ▲▼ (Cambiar valor) | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|
| L20 | Curva S2 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L21 | Curva S 3 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L22 | Curva S 4 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L23 | Curva S 5 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L24 | Curva S 6 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L25 | Curva S 7 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L26 | Curva S 8 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L27 | Curva S 9 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L28 | Curva S 10 | 20 % (Accionamientos con reductor) 25 % (Accionamientos sin engranajes) |
|||
| L29 | SFO Hold T | Operación de piso corto (tiempo de espera) - NO SE UTILIZA | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00 s | |
| L30 | Velocidad SFO | Operación de piso corto (velocidad permitida) - NO SE UTILIZA | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00 s | |
| L36 (*) | Ganancia ASR P Alta | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 10,00 (Accionamientos con reductor) 2,50 (Accionamientos sin engranajes) |
|
| L37 (*) | Ganancia de ASR I Alta | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 0,100 | |
| L38 (*) | Ganancia ASR P Baja | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 10,00 (Reductores) 2,50 (Accionamientos sin engranajes) |
|
| L39 (*) | ASR I Ganancia baja | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 0,100 | |
| L40 (*) | Velocidad del interruptor 1 | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | 5,00 (Accionamientos con reductor) 1,00 (Accionamientos sin engranajes) |
|
| L41 (*) | Velocidad del interruptor 2 | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | 10,00 (Accionamientos con reductor) 2,00 (Accionamientos sin engranajes) |
|
| L42 (*) | Ganancia de ASR-FF | ◄► (Selección) ▲▼ (Cambiar valor) | 0.000 - 10.000 s | 0.000 s | |
| L55 (*) | TB Hora de inicio | ◄► (Selección) ▲▼ (Cambiar valor) | 0.00 - 1.00 s | 0.20 s | |
| L56 (*) | TB Hora de finalización | ◄► (Selección) ▲▼ (Cambiar valor) | 0.00 - 20.00 s | 0.20 s | |
| L64 (*) | TB Digital 3 | ◄► (Selección) ▲▼ (Cambiar valor) | -200 - +200 % | 0 % | |
| L65 (*) | Funcionamiento de la ULC | Carga desequilibrada Compensación | ◄► (Selección) ▲▼ (Cambiar valor) | 0-1 | 1 |
| L66 (*) | Activación de ULC | Compensación de carga desequilibrada (Tiempo de activación) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,01-2 s | 2,00 s |
| L68 (*) | Ganancia ULC ASR P | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 10 (FAI/FAS) 10 (Codificador) |
|
| L69 (*) | ULC ASR I gain | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 0,01 (FAI/FAS) 0,01 (Codificador) |
|
| L73 (*) | APR P ganancia cero | Ver Control de retroceso y confort de marcha | ◄► (Selección) ▲▼ (Cambiar valor) | 0 (FAI/FAS) 0 (Codificador) |
|
| L74 (*) | Ganancia APR D | ◄► (Selección) ▲▼ (Cambiar valor) | 0.0 | ||
| L75 (*) | Tiempo de filtrado | ◄► (Selección) ▲▼ (Cambiar valor) | 0.000 s | ||
| L76 (*) | Constante ACR P | ◄► (Selección) ▲▼ (Cambiar valor) | 0.00 | ||
| L80 | Modo de freno | Modo de salida del Control de Frenos (BRKS) | ◄► (Selección) ▲▼ (Cambiar valor) | 1-2 | 1 |
| L81 | Nivel de freno activado | Corriente de salida que pone en ON la señal BRKS cuando L80 = 2. | ◄► (Selección) ▲▼ (Cambiar valor) | 0,-200% de la corriente en vacío del motor | 100 % |
| L82 | Retraso en la activación del freno | Retraso desde la activación de la salida BRKS | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10,00 segundos | 0,20 s |
| L83 | Retraso en la desactivación de los frenos | Retraso desde la desactivación de la salida BRKS | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-100 segundos | 0,10 s |
| L84 | BRKS comprobar t | Tiempo admisible entre la salida BRKS y la entrada BRKE (Er6) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10 segundos | 0,00 s |
| L99 | ACCIÓN SEL | No se utiliza | ◄► (Selección) ▲▼ (Cambiar valor) | ||
| L134 | Tiempo de retroceso | Tiempo de holgura (Cuando L65 = 2) | ◄► (Selección) ▲▼ (Cambiar valor) | 0,00-10,00 s | 0 |
| L198 | Interruptor de ajuste óptico 1 | BIT0 = Es posible fijar la frecuencia de la portadora a 16 kHz para toda la gama de velocidades con el fin de reducir el ruido de conducción. | ◄► (Selección) ▲▼ (Cambiar valor) | 0 | |
| L199 | Interruptor de ajuste óptico 2 | Reservado. | ◄► (Selección) ▲▼ (Cambiar valor) | 0 |
(*) - No disponible en el modelo de inversor LM2C.
NOTA: Consulte el diagrama de tiempos para entender mejor algunos parámetros de significado.
Menú "Parámetros de grabación"
Nota: el ahorro de datos no es necesario sólo para la emulación de los controladores PBV3.
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Parámetros de Rec > |
| Piso 0 12:30:56 < Parámetros de Rec > | ----- ENTER ----> | Piso 0 12:30:56 < Parámetros de grabación > Guardar parámetros | ----- ENTER ----> <----- ESC ------ | Piso 0 12:30:56 < Parámetros de grabación > Guardar parámetros ¿Está seguro? |
| ▲ ▼ | ENTRA EN ↓ |
|||
| Piso 0 12:30:56 < Parámetros de grabación > Guardar parámetros Finalizar reg. |
||||
| Piso 0Piso 0 12:30:56 < Parámetros de grabación > Restablecer parámetros | ----- ENTER ----> <----- ESC ------ | Piso 0Piso 0 12:30:56 < Parámetros de grabación > Restablecer parámetros ¿Está seguro? |
||
| ENTRA EN ↓ |
||||
| Piso 0Piso 0 12:30:56 < Parámetros de grabación > Restablecer parámetros Finalizar reg. |
||||
"Menú "Reloj
| ----->>>>> | | ----->>>>> | Planta 0 - 12:30:56 < Reloj > |
- Da = Día
- Mo = Mes
- Yr = Año
- D = Día de la semana (1=Lunes)
- Hr = Horas
- Mn = Minutos
ATENCIÓN: En caso de parada del sistema, el tiempo se guarda mediante un Supercondensador (hasta 5 días sin alimentación).
VVVF Frenic Lift Setting
- Procedimiento de ajuste -
Seleccione "Menú de instalación".

En la pantalla aparecerá:

Confirme pulsando OK y seleccione "Máquina / VVVF Autotuning":
Inserte el parámetro solicitado y pase al siguiente pulsando la flecha derecha.
La lista de Parámetros VVVF es:
| Parámetro | Descripción | Motor sin engranajes | Motorreductor |
|---|---|---|---|
| P01 - Polos del motor | Inserte el número del polo del motor | X | X |
| F03 - Velocidad máxima | Insertar la velocidad máxima del motor [RPM] (placa del motor) | X | X |
| F04 - Corriente nominal | Insertar Velocidad nominal del motor [Hz] (Placa del motor) | X | X |
| F05 - Tensión nominal | Insertar Tensión nominal del motor [V] (Placa del motor) | X | X |
| P08 - M-%X | Insertar valor 10 % | X | |
| P07 - M-%R1 | Insertar valor 5 % | X | |
| P06 - M-Sin carga Curr. | Insertar valor 0 [A] | X | |
| P03 - Corriente nominal del motor | Inserte la corriente nominal [A] (Placa del motor) | X | |
| P02 - Tapa del motor | Inserte la potencia nominal [kW] (Placa del motor) | X | |
| C11 - Alta velocidad | Insertar alta velocidad [Hz] (Placa del motor) | X | |
| C10 - Velocidad media | Insertar velocidad media [Hz] (Velocidad de inspección) | X | |
| C07 - Velocidad de fluencia | Insertar velocidad baja [Hz] (10% de C11) | X | |
| L01 - Selección PG | Ajustar el tipo de codificador del motor: (VVVF Tablas opcionales) | X | X (*) |
| L02 - Resolución PG | Resolución del codificador del motor de inserción | X | X (*) |
(*) Sólo bucle cerrado
El último parámetro es diferente según el tipo de motor:
Motor sin engranajes:
 Seleccione 4 : Sintonización estática
Seleccione 4 : Sintonización estáticaSeleccione 5 : Sintonización dinámica (sólo si está libre de cuerdas)
Motor de engranajes:
 Seleccione 3
Seleccione 3En caso de cualquier problema, vaya al menú de fallos para identificar el problema (§ Errores de ajuste del motor)
Al final del procedimiento, pulse el botón de subida/bajada y compruebe el sentido correcto del movimiento de la cabina del ascensor; si no es correcto, invierta los valores de los parámetros E98 y E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Especificaciones del codificador | Placa del codificador | Motor | |
| Canal de salida A/B | Señal absoluta | |||
| 0 | Colector abierto / Push-Pull | = | OPC-PG3 | IM |
| Conductor de línea | = | OPC-PMPG | ||
| 1 | Colector abierto / Push-Pull | Z | OPC-PG3 | IM Y PMSM |
| 4 | Diferencial sinusoidal (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS o OPC-PSH | PMSM |
| 5 | Diferencial sinusoidal (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Diferencial sinusoidal (1Vpp) | BISS-C (Sendix 5873) | OPC-PS o OPC-PSH | PMSM |
| 7 | Diferencial sinusoidal (1Vpp) | SSI (ECN1313) | OPC-PS o OPC-PSH | PMSM |
| 8 | Diferencial sinusoidal (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Código | Descripción | |
|---|---|---|
| OC1 | Sobrecorriente durante la aceleración | La corriente de salida momentánea del inversor ha superado el nivel de sobrecorriente. |
| OC2 | Sobrecorriente durante la desaceleración | |
| OC3 | Sobrecorriente durante el funcionamiento a velocidad constante | |
| EF | Fallo de tierra | La corriente de fase cero causada por un fallo a tierra en el circuito de salida El circuito de salida ha superado el límite permitido. (30kW o más) |
| OV1 | Sobretensión durante la aceleración | La tensión del bus de CC ha superado el nivel de detección de sobretensión nivel de detección de sobretensión. |
| OV2 | Sobretensión durante la deceleración | |
| OV3 | Sobretensión durante el funcionamiento a velocidad constante | |
| LV | Baja tensión | La tensión del bus de enlace de CC cayó por debajo del nivel de detección de subvoltaje. edad |
| Lin * | Pérdida de fase de entrada | Se ha producido una pérdida de fase de entrada o la tensión interfásica de desequilibrio de la tensión interfásica era grande. |
| OH1 | Sobrecalentamiento del disipador de calor | La temperatura alrededor del disipador de calor ha aumentado anormalmente. |
| OH2 | Alarma externa | Se ha introducido el THR de alarma externa. (cuando el THR "Habilitar disparo de alarma externa" ha sido asignado a cualquier terminal de entrada digital) |
| OH3 | Sobrecalentamiento interno del inversor | La temperatura en el interior del inversor ha superado el límite permitido. |
| OH4 | Protección del motor (termistor PTC/NTC) | La temperatura del motor ha aumentado de forma anormal. |
| DBH | Sobrecalentamiento del registro de frenado | La temperatura de la resistencia de frenado ha superado el límite permitido. |
| OL1 | Sobrecarga del motor 1 | La protección térmica electrónica para la detección de sobrecarga del motor se ha activado. |
| OLU | Sobrecarga del inversor | La temperatura en el interior del IGBT ha aumentado de forma anormal. |
| OS | Prevención del exceso de velocidad | La velocidad del motor es superior a la velocidad máxima * L32. |
| PG | Cableado roto en la PG | La velocidad del motor es superior a la velocidad máxima * L32. |
| nrb | Error de rotura de cable NTC | Se ha detectado una rotura de cable en el circuito de detección del termistor NTC. |
| Er1 | Error de memoria | Se ha producido un error al escribir datos en la memoria del inversor memoria del inversor. |
| Er2 | Error de comunicación del teclado | Se ha producido un error de comunicación entre la llave y el inversor. almohadilla |
| Er3 | Error de la CPU | Se ha producido un error en la CPU o en el LSI. |
| Er4 | Error de comunicación de la opción | Se ha producido un error de comunicación entre la tarjeta tarjeta opcional y el inversor. |
| Er5 | Error de opción | Se ha detectado un error en la tarjeta opcional conectada (no en el el inversor). |
| Er6 | Protección de la operación | Se ha intentado una operación incorrecta. |
| Er7 | Error de sintonía | La sintonización automática o la sintonización de la posición del polo magnético ha fallado, lo que ha provocado resultados de sintonización anormales. |
| Er8 | Error de comunicación RS-485 (puerto 1) | Se ha producido un error de comunicación durante la comunicación RS-485 de la comunicación RS-485. |
| ErP | Error de comunicación RS-485 (puerto 2) | |
| OPL | Pérdida de fase de salida | Se ha producido una pérdida de fase de salida. |
| ErE | Desajuste de la velocidad | La velocidad de referencia y la velocidad de detección son diferentes. |
| ErF | Error de almacenamiento de datos durante la subtensión | Cuando se activó la protección contra la baja tensión, el inversor no pudo guardar los datos, mostrando este error. |
| ErH | Error de hardware | El LSI de la placa de circuito impreso de potencia ha funcionado mal debido al ruido, etc. |
| Ert | Error de comunicación CAN abierta | Se ha producido un error de comunicación durante la comunicación CANopen. |
| ECF | Error en el circuito de los terminales EN1, EN2 | Se ha diagnosticado una anomalía en el circuito de terminales EN1, EN2. |
| Ot | Corriente de sobrepartida | La corriente de par de referencia se volvió excesiva. |
| DBA | Transistor de frenado roto | Detección de una anomalía en el transistor del freno |
| bbE | Confirmación de los frenos | El inversor detecta el desajuste entre la señal de control del freno y la señal de detección del freno (retroalimentación). |
| Eo | Los terminales EN1, EN2 parpadean | Detectada colisión entre la salida ENOFF y los terminales EN1/EN2. entrada |
| ECL | Error lógico personalizable | Un error de configuración de la lógica personalizable ha provocado una alarma. |
| OH6 | Sobrecalentamiento de la resistencia de carga | La temperatura de la resistencia de carga dentro del inversor ha superado el límite permitido. |
| rbA | Rescate por alarma de freno | No se ha detectado ningún movimiento durante la operación de rescate por el control de los frenos. |
| tCA | Alcanzar el número máximo de viajes contador | El número de cambios de dirección de viaje ha alcanzado el nivel preestablecido. |
| SCA | Error de control de cortocircuito | El inversor detecta el desajuste entre la señal de control de cortocircuito y la señal de detección de cortocircuito (retroalimentación). |
| LCO | Sobrecarga de la célula de carga | La función de célula de carga ha detectado la situación de sobrecarga mediante del nivel preestablecido. |
| Código | Nombre de la alarma | Subcódigo | Descripción |
|---|---|---|---|
| OC1 | Sobrecorriente durante la aceleración | 1 | Protección de sobrecorriente (interrupción OCT) - Sobrecorriente normal |
| 2 | Protección de sobrecorriente (interrupción OCL) - Sobrecorriente normal | ||
| OC2 | Sobrecorriente durante la desaceleración | 3 | Protección contra cortocircuitos - Sobrecorriente en el arranque |
| 4 | Protección contra fallos a tierra - Sobrecorriente en el arranque | ||
| OC3 | Sobrecorriente durante la velocidad constante | 5 | Fallo de la señal de detección (señal FAULT) - Circuito de puerta |
| 11 | Fallo de la señal de detección (señal OCT) - Circuito de detección (PPCB) | ||
| 12 | Fallo de la señal de detección (señal OCL) - Circuito de detección (PPCB) | ||
| OV1 | Sobretensión durante la aceleración | 1 11 | Protección de sobretensión (señal OVT) Fallo de la señal de detección (señal OVT) |
| OV2 | Sobretensión durante la deceleración | ||
| OV3 | Sobretensión durante la velocidad constante | ||
| Lin | Pérdida de fase de entrada | 1 | Detección del nivel de protección del diodo rectificador |
| 2 | Detección del nivel de tolerancia en funcionamiento continuo | ||
| OPL | Pérdida de fase de salida | 1 | |
| OH1 | Sobrecalentamiento de las aletas de refrigeración | 1 | Sobrecalentamiento de las aletas de refrigeración (NTC2) |
| 3 | Sobrecalentamiento del convertidor (NTC4) | ||
| 11 | Desconexión del termistor (NTC2) | ||
| OH2 | Fallo externo | 0 | Protección a través del THR |
| OH3 | Sobrecalentamiento en el interior del inversor | 0 | Sobrecalentamiento del aire interno (NTC1) |
| OH4 | Protección del motor (termistor PTC) | 1 | Termistor PTC |
| 2 | Termistor NTS | ||
| OH6 | Sobrecalentamiento de la resistencia de carga | 1 | Sobrecalentamiento de la resistencia de carga Excepto para FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Desconexión del termistor (NTC3) | ||
| OL1 | Sobrecarga del motor | 0 | Detección de corriente térmica electrónica |
| LV | Baja tensión | 1 | Se produce una subtensión durante la activación de la puerta |
| 11 | Nivel mínimo de funcionamiento de la batería | ||
| dbH | Sobrecalentamiento de la resistencia DB | 0 | Sobrecalentamiento de la resistencia DB (F50) <-> F52) |
| 1 | Transistor DB 2sec_ON continuamente (R incorrecto demasiado alto) | ||
| dbA | Detección de fallos en el transistor DB | 0 | Detección de fallos en el transistor DB |
| Er1 | Error de memoria | 0x0001 | Destrucción del historial de alarmas |
| 0x0002 | Código de función estándar | ||
| 0x0004 | Código de función del usuario | ||
| 0x0008 | Código de función oculto | ||
| 0x0010 | Error de área de programa | ||
| 0x0040 | Error de lectura (reintento) | ||
| 0x0080 | Error de escritura (reintento) | ||
| 0x0100 | Área ampliada | ||
| 0x1000 | Área de valores de ajuste | ||
| Er2 | Error de comunicación del panel del teclado | 1 | Detección de la desconexión |
| Er3 | Error de la CPU | 1 | Procesamiento de reinicio de la CPU |
| 1000 | Error de suma de comprobación del código de función (error de RAM) | ||
| 0x0001 | Error de código de función estándar | ||
| 0x0002 | Error de código de función oculto (código u) | ||
| 0x0004 | Error de código de función oculto (código n) | ||
| 0x0008 | Error en el código de función de la válvula de ajuste | ||
| 0x0010 | Área ampliada | ||
| 2000 | Error de ciclo fijo | ||
| 0x0001 | Error de ciclo L1 | ||
| 0x0004 | Error de ciclo L3 | ||
| 0x0008 | Error de ciclo L4 | ||
| 0x0020 | Error de ciclo L6 | ||
| 0x0080 | Error de ciclo LP | ||
| 3000 | Corte injusto en | ||
| 5001 | Entrada RST exterior | ||
| 7001 | Destrucción del área de la pila | ||
| 9000 | Detección de fallos de software | ||
| 0x0200 | Alarma QUE sobre | ||
| Er4 | Error de comunicación de la opción | 1 | Error de comunicación del puerto A No hay opción |
| 3 | Error de comunicación del puerto C | ||
| 10 | Un exceso de opción instalada No hay opción |
||
| Er5 | Error de opción | 0 | Opción in-match |
| 1 | Señal de finalización ON (No hay opción) | ||
| 10 | Error de EEPROM de AIO PT (No hay opción) | ||
| 26 | Error de información de posición PR-PP (sólo OPC-PMPG+L01=2) | ||
| 27 | Error de inicio de la información de posición del PP | ||
| 50 | No hay área de guardado | ||
| 51 | Error de comando de comunicación | ||
| 52 | Error de código de distinción | ||
| 53 | Error de suma de comprobación | ||
| 54 | Error de escritura | ||
| Er6 | Error en el procedimiento de la operación | 2 | Comprobación de inicio |
| 7 | Error de asignación de varias velocidades | ||
| 8 | Comprobación de los frenos (tiempo de espera) | ||
| 9 | |||
| 10 | No intentar la sintonización de la posición de los polos magnéticos | ||
| 11 | Error de confirmación del contactor del lado de salida | ||
| 12 | Falta de velocidad de calificación | ||
| 14 | Chack de freno (error asignado) | ||
| 15 | Cortocircuito (error asignado por el SCC) | ||
| 16 | Error de rescate |
| Código | Nombre de la alarma | Subcódigo | Descripción |
|---|---|---|---|
| Er7 | En la puesta a punto del motor de inducción | 1 | Error de asignación de varias velocidades |
| 2 | Error de fase R1 | ||
| 3 | Error %X | ||
| 6 | Error de corriente de salida | ||
| 7 | Comando de accionamiento OFF | ||
| 9 | Terminal BX ON | ||
| 11 | Detección de baja tensión (BT) | ||
| 15 | La alarma se produce | ||
| 16 | Cambio de comando de accionamiento | ||
| 19 | Otros | ||
| 21 | Error I0 | ||
| 24 | Terminal ES | ||
| 25 | Terminal DRS | ||
| Er7 | En el ajuste de la ganancia de detección actual | 32 | Error de escritura de la EEPROM |
| 37 | STOP tecla_ON | ||
| Er7 | En la sintonía de la posición del polo magnético | 51 | Sintonización sin motor |
| 52 | Error de sintonización de la posición de los polos magnéticos | ||
| 53 | Fallo de ajuste de F42 | ||
| 54 | Desajuste L04 | ||
| Er7 | En la sintonización del offset de detección actual | 61 | Error de escritura de la EEPROM |
| 62 | STOP tecla_ON | ||
| Er7 | Error de ajuste del motor síncrono | 5058 | Error de resistencia de maduración (límite inferior) |
| 5059 | Error de resistencia de maduración (límite superior) | ||
| 5060 | Error Ld (límite inferior) | ||
| 5061 | Error Ld (límite superior) | ||
| 5062 | Error Lq (límite inferior) | ||
| 5063 | Error Lq (límite superior) | ||
| 5080 | Error de ganancia ACR (límite superior) | ||
| 5081 | Error de ganancia ACR (límite inferior) | ||
| Er8 | Error de comunicación RS485 | 0 | CH1 Error de comunicación RS485 |
| nrb | Detección de desconexión del termistor NTC | 0 | Detección de desconexión del termistor NTC |
| OS | Sobrevelocidad | 0 | Protección contra el exceso de velocidad |
| pg | Error PG | 1 | |
| 2 | |||
| 50 | Opción - Detección de desconexión de la fase A/B (Sin) | ||
| 51 | Opción - Detección de desconexión de la fase C/D (Sin) | ||
| 52 | Opción - Detección de desconexión de la fase R (Sin) | ||
| 53 | Opción - Detección de desconexión de fase A/B (pulso) | ||
| 54 | Opción - Detección de desconexión de la fase Z (pulso) | ||
| 55 | Opción - Detección de desconexión de fase U/V/W (pulso) | ||
| 60 | Opción - tiempo de espera del perro guardián | ||
| 61 | Opción - tiempo de respuesta del codificador en serie | ||
| 62 | Opción - Error de CRC de comunicación de la CPU | ||
| 63 | Opción - Error de comunicación de la CPU | ||
| 70 | Opción - Error de salida ABZ | ||
| 71 | Opción - codificador en serie cada alarma | ||
| 72 | Opción - error de acceso a la memoria | ||
| 73 | Opción - error de culcuración | ||
| 80 | Opción - Error de configuración de la tarjeta PG | ||
| ErE | Desajuste de velocidad (exceso de desviación de velocidad) | 1 | Las marcas de comando de velocidad y de detección de velocidad difieren |
| 3 | Desviación de velocidad excesiva (detección de velocidad > orden de velocidad) | ||
| 5 | La detección de velocidad sigue siendo 0 | ||
| 7 | Desviación de velocidad excesiva (detección de velocidad < orden de velocidad) | ||
| ErF | Error de almacenamiento de datos de baja tensión | 0 | Error de almacenamiento de datos de baja tensión |
| ErP | RS485 2ch error de comunicación | 0 | CH2 Error de comunicación RS485 |
| Ert | Error de comunicación CAN | 1 | Bus-off |
| 2 | Detección del tiempo de espera de la guardia | ||
| OLU | Sobrecarga del inversor | 1 | Protección IGBT |
| 2 | Térmico del inversor Sólo FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | Error del circuito EN | 10 | Error de entrada EN (_EN1A=L, EN2A=L) |
| 11 | Error de entrada EN (_EN1A=H, EN2A=H) | ||
| 5000 | Error en el circuito de diagnóstico | ||
| 5010 | Fallo de la fuente de alimentación del P5S | ||
| 5020 | Diagnóstico de la CPU: Diagnóstico de configuración de puertos | ||
| 5030 | Diagnóstico de la CPU: Diagnóstico de la ROM | ||
| 5040 | Diagnóstico de la CPU: Diagnóstico de la RAM | ||
| 5050 | Diagnóstico de la CPU: monitor de secuencia | ||
| ECL | Mal funcionamiento de la lógica de personalización | 0 | Error de lógica de personalización |
| Err | Fallo simulado | 9998 | Fallo simulado |
| Ot | Error de par excesivo | 0 | Error de par excesivo |
| bbE | Error del freno mecánico | 11 | Error en el freno 1 |
| 12 | Error en el freno 2 | ||
| Eo | ES Error de terminal | 0 | ES Error de terminal |
| rbA | Error de detección de la velocidad de rescate | 0 | Error de detección de la velocidad de rescate |
| tCA | Interruptor de dirección límite de llegada | 0 | Interruptor de dirección límite de llegada |
| SCA | Error de cortocircuito | 0 | Error de cortocircuito |
| Lco | Error de la célula de carga | 0 | Error de la célula de carga |
| EF | Protección del suelo | 0 | Corriente trifásica Sólo FRN0060LM2A-4 <-> FRN0091LM2A-4 |
En motores antiguos puede fallar el auto-tuning: en estos casos se puede ejecutar el auto-tuning tipo 1 (en el punto 10 seleccionar P04 = 1) pero en este caso los valores P06 y P12 deben ser introducidos manualmente.

Los valores típicos de P06 están entre el 30% y el 70% de P03.
 F.r. = Frecuencia nominal
F.r. = Frecuencia nominalS.s. = Velocidad sincrónica
S.r. = Velocidad nominal
Los valores aceptables de P12 están entre 0,5 y 5 Hz.
Por ejemplo, para un motor de 4 polos, la frecuencia nominal es de 50 Hz, la velocidad sincrónica es de 1500 rpm y la velocidad nominal está en la placa del motor (siempre en revoluciones por minuto).
Motor sin engranajes
En caso de que haya un problema "Error 52 = er7 Error VVVF" aparecerá en el MENÚ ERRORES. En este caso, compruebe las conexiones del codificador del motor, borre los errores en el menú "Errores" y repita el procedimiento de ajuste desde el punto 14.
Después del procedimiento de poletuning intente mover el elevador en mantenimiento en subida y bajada durante algunas revoluciones del motor. Si se mueve correctamente el procedimiento ha terminado, de lo contrario, en caso de un error del VVVF (ere u Ocx u Os), invierta las dos fases del motor cambiando el parámetro H190 del VVVF, borre los errores en el menú "Fault" y repita el procedimiento de poletuning.
Instrucciones para la actualización del software
NombreArchivo.PP2 o .PP4
Inserte el dispositivo USB en la ranura, esperando el mensaje como en la Figura 1.
 (Figura 1)
(Figura 1)Seleccione "Poner un archivo en PlayPad" (por defecto), pulse el botón OK. La ventana cambia a la Figura 2.
 (Figura 2)
(Figura 2)Siga las instrucciones en pantalla y seleccione el fichero .PP2/4 (en el ejemplo PLP2_2.PP2) y pulse OK. La ventana cambia a la Figura 3
 (Figura 3)
(Figura 3)Pulse OK para confirmar el proceso de actualización. La ventana cambia a la Figura 4
 (Figura 4)
(Figura 4)Al final del procedimiento hay que retirar el USB (aparecerá la Figura 5 o la Figura 6).
 (Figura 5)
(Figura 5) (Figura 6)
(Figura 6) (Figura 7)
(Figura 7)La ventana se convierte en la Figura 8.
 (Figura 8)
(Figura 8)Siga las instrucciones en pantalla y seleccione el archivo *.bin y pulse OK. La ventana cambia a la Figura 9.
 (Figura 9)
(Figura 9)Pulse OK para confirmar el proceso de actualización. La ventana cambia a la Figura 10, espere un rato.
 (Figura 10)
(Figura 10)Seleccione el dispositivo (o grupo de dispositivos) que desea actualizar y pulse OK (Figura 11)
 (Figura 11)
(Figura 11)La ventana cambia a la Figura 12: espere hasta que finalice el proceso. Si es necesario, pulse cualquier botón de flecha para encender la luz de fondo.
 (Figura 12)
(Figura 12)Cuando el proceso termine (Figura 13) pulse el botón Esc hasta que la ventana muestre "Please remove USB Device" (Figura 14).
 (Figura 13)
(Figura 13) (Figura 14)
(Figura 14)| Dispositivo | Tiempo necesario para actualizar el SW |
|---|---|
| Tarjeta madre (Playboard Controller) | 3 minutos |
| PlayPad 4.0 | 1 minuto |
| Tarjeta TOC (Car TOP Interface) | 1 minuto |
| Placa DMCPIT (Interfaz COP del coche) | 1 minuto |
| Interfaces de pulsadores en serie (dispositivos BDU) | 30 segundos |
| Tarjetas de expansión (PIT8 / 16RL / 16IO) | 30 segundos |
(Tabla III.1 - Calendario para la actualización del software)






