
Læringsprosedyre av gulv
Hvis kontrolleren er utstyrt med Absolute Encoder eller DMG Encoder eller Motor Encoder, er det mulig å dra nytte av gulvposisjonslæringsfunksjonen, som muliggjør en raskere systemkonfigurasjon og finjustering. Prosedyren er forskjellig avhengig av typen koder, som beskrevet i følgende avsnitt:
ELGO LIMAX 33CP: Manuell innlæringsprosedyre
Hvis det i installasjonen ikke er nok klaring (redusert hode) anbefales det å gjøre Manual Teach fra utsiden av heissjakten (minst de første 3 trinnene): I dette tilfellet kan du bruke inspeksjonsboksen inne i kontrolleren og etter toppen av ar InspeksjonsBOKS.
 Prosedyren må gjøres før du setter systemet i normal modus.
Prosedyren må gjøres før du setter systemet i normal modus.
For å starte prosedyren må heisen være i midlertidig drift. Inntil slutten av den manuelle innlæringsprosedyren er sikkerhetskontaktene koblet til sikkerhetskjeden, men er ennå ikke operative (endelig grensebryter, inspeksjonsgrensebryter, OSG, eSGC) fordi ELGO ikke kjenner den virkelige posisjonen til grensepunktene til skaftet. Den eneste kontrollen basert på ELGO Device er Teach over speed (0,4 m/s), så hvis kabinhastigheten er høyere enn 0,4 m/s, åpner ELGO OC-kontakten (og lukker OC-kontakten etter at kabinen står stille).
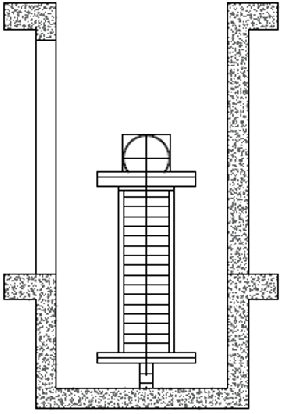 1) – Sett heisen bil i høyeste posisjon (motvekt på buffere).
1) – Sett heisen bil i høyeste posisjon (motvekt på buffere).
2) – Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å sette ELGO-enheten i læremodus. På spilleplaten viser en WAIT blinkende melding (i tilfelle problemprosedyren avsluttes med en feil ELGO, se Feilsøking ).
ELGO-enheten slår på LED MODE og begynner å gi akustisk tilbakemelding (ett pip hvert 2. sekund). Dette akustiske signalet vil være tilstede under den manuelle innlæringsprosedyren. På spilleplaten vises en "TOPP" blinkende melding.
 3) – Trykk igjen samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere det høyeste punktet på skaftet inne i ELGO. Dette punktet vil være referansepunktet for toppgrenser (øvre grensebryter, toppinspeksjonsgrense, TOP ETSL-kontroll, etc.).
3) – Trykk igjen samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere det høyeste punktet på skaftet inne i ELGO. Dette punktet vil være referansepunktet for toppgrenser (øvre grensebryter, toppinspeksjonsgrense, TOP ETSL-kontroll, etc.).
De ELGO-enheten gir en lang akustisk tilbakemelding for å bekrefte at toppgrensedataene er registrert.
På spilleplaten vises en "Floor n" blinkende melding (n er gulvet du skal ta opp).
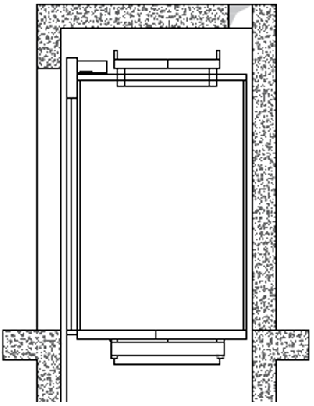
4) – Flytt hytta opp til den høyeste etasjen.
Trykk på OPP- og NED-knappene på inspeksjonsboksen 3 ganger samtidig for å registrere gulvposisjonen inne i ELGO.
De ELGO-enheten gir en kort akustisk tilbakemelding for å bekrefte at gulvdataene er registrert.
På spilleplaten vises en "Etage n-1" blinkende melding (n-1 er neste etasje du skal ta opp).
 5) – Flytt hytta nedover til neste etasje.
5) – Flytt hytta nedover til neste etasje.
Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere gulvets posisjon inne i ELGO.
ELGO-enheten gir en kort akustisk tilbakemelding for å bekrefte at gulvdataene er registrert.
6) – Gjenta forrige punkt til den laveste etasjen er nådd.
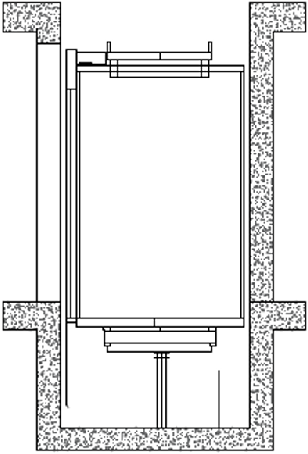
7) – Etter opptak av de Posisjon i bunnen på spilleplaten viser en "BOTTOM" blinkende melding, flytt kabinen til det laveste punktet på sjakten (kabin på bufferne).
Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere den laveste posisjonen inne i ELGO. Dette punktet er opprinnelsen til magnetbåndet (0 mm vist) og vil være referansepunktet for bunngrenser (bunngrensebryter, bunninspeksjonsgrense, bunn ETSL-kontroll, etc.).
ELGO-enheten gir en lang akustisk tilbakemelding for å bekrefte registreringen av data.
I dette øyeblikket registrerer kontrolleren automatisk:
• Plassering av oppkjøpte gulv;
• Dørsoneposisjon, brukt av kontrolleren for å muliggjøre forbikobling av dørkontakter (foråpning / ny nivellering).
• Retardasjonsavstand, i henhold til løftehastigheten .
 På spilleplaten vises en "/\" blinkende melding: Flytt heisen opp til nederste etasje. Kontrolleren vil sette ELGO i normal modus. (ikke mulig før fordi ELGO ville være på grensene for å åpne OC og låse hytta).
På spilleplaten vises en "/\" blinkende melding: Flytt heisen opp til nederste etasje. Kontrolleren vil sette ELGO i normal modus. (ikke mulig før fordi ELGO ville være på grensene for å åpne OC og låse hytta).
På spilleplaten viser en "WAIT" blinkende melding i 10 sekunder, vent til vil vises etasje 0.
ELGO-enheten stopper det akustiske pipet og LED MODE begynner å blinke (1 blink per sekund).
Nå er ELGO-enheten operativ for sikkerhetskontakter:
• Elektronisk sikkerhetsutstyr (hvis tilgjengelig)
• Elektronisk OSG.
• Endelige grensebrytere.
• Inspeksjonsgrensebrytere er ennå ikke administrert fordi heisen er i midlertidig modus.
Før normal driftsmodus er det obligatorisk å utføre en automatisk aksellæring for å stille inn riktige stoppavstander i retning oppover og nedover for hver etasje.
Automatisk læringsprosedyre (ELGO LIMAX33-CP)
9) – Heisen må være i midlertidig drift. Sett heisen i nederste etasje med halvparten av maksimal belastning.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Vri inspeksjonsvelgeren til Normal
Heisen begynner å bevege seg automatisk:
• Oppoverturer med retardasjon og stopp i hver etasje.
• Nedturer med retardasjon og stopp i hver etasje.
Når hytta kommer tilbake til nederste etasje er systemet klart til å gå inn i normal service.
After automatic learning procedure in <Positioning>, Monitorkoder du kan stille inn:
• Retardasjonsavstander i normal tjeneste for bremsekomfort
– R1S (Side 3) oppover retardasjonsavstand
– R1D (Side 2) nedadgående retardasjonsavstand
Disse verdiene settes automatisk etter automatisk innlæring i henhold til heisens hastighet (se løftehastighet og retardasjonsavstand).
• Stoppavstander i akselens inspeksjon
– I_LIM_S oppover stoppavstand før toppetasjeposisjon
– I_LIM_D nedadgående stoppavstand før nederste etasjeposisjon
I redusert hode/grop må disse verdiene vurderes i henhold til det forhåndsutløste sikkerhetssystemet.
• Stoppavstander i normal tjeneste
– N_LIM_S oppover stoppavstand etter toppetasjeposisjon
– N_LIM_D nedadgående stoppavstand etter bunnposisjon
Disse verdiene settes automatisk etter automatisk innlæring i en avstand lik 30 mm fra ekstreme gulv (i tilfelle mindre avstand fra referansepunkter regnes det som midtpunktet mellom ekstreme gulv og ekstreme referanseposisjoner).
• ELGO+eSGC pre-trigger posisjon
– TRIPS-avstand fra topp Referanseposisjon der eSGC elektrisk kommando tvinger kabinen til å stoppe (kun for redusert hodeløft).
– TRIPD-avstand fra bunn Referanseposisjon der eSGC elektrisk kommando tvinger kabinen til å stoppe (kun for installasjon med redusert grop)
Disse verdiene er lesebeskyttede verdier og er større enn 0 mm bare hvis ELGO er en del av det forhåndsutløste sikkerhetssystemet (sammen med elektrisk sikkerhetsutstyr / overhastighetsregulator).
Prosedyren må gjøres før du setter systemet i normal modus.For å starte prosedyren må heisen være i midlertidig drift. Inntil slutten av den manuelle innlæringsprosedyren er sikkerhetskontaktene koblet til sikkerhetskjeden, men er ennå ikke operative (endelig grensebryter, inspeksjonsgrensebryter, OSG, eSGC) fordi ELGO ikke kjenner den virkelige posisjonen til grensepunktene til skaftet. Den eneste kontrollen basert på ELGO Device er Teach over speed (0,4 m/s), så hvis kabinhastigheten er høyere enn 0,4 m/s, åpner ELGO OC-kontakten (og lukker OC-kontakten etter at kabinen står stille).
1) – Sett heisen bil i høyeste posisjon (motvekt på buffere).2) – Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å sette ELGO-enheten i læremodus. På spilleplaten viser en WAIT blinkende melding (i tilfelle problemprosedyren avsluttes med en feil ELGO, se Feilsøking ).
ELGO-enheten slår på LED MODE og begynner å gi akustisk tilbakemelding (ett pip hvert 2. sekund). Dette akustiske signalet vil være tilstede under den manuelle innlæringsprosedyren. På spilleplaten vises en "TOPP" blinkende melding.
3) – Trykk igjen samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere det høyeste punktet på skaftet inne i ELGO. Dette punktet vil være referansepunktet for toppgrenser (øvre grensebryter, toppinspeksjonsgrense, TOP ETSL-kontroll, etc.).De ELGO-enheten gir en lang akustisk tilbakemelding for å bekrefte at toppgrensedataene er registrert.
På spilleplaten vises en "Floor n" blinkende melding (n er gulvet du skal ta opp).
4) – Flytt hytta opp til den høyeste etasjen.
Trykk på OPP- og NED-knappene på inspeksjonsboksen 3 ganger samtidig for å registrere gulvposisjonen inne i ELGO.
De ELGO-enheten gir en kort akustisk tilbakemelding for å bekrefte at gulvdataene er registrert.
På spilleplaten vises en "Etage n-1" blinkende melding (n-1 er neste etasje du skal ta opp).
5) – Flytt hytta nedover til neste etasje.Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere gulvets posisjon inne i ELGO.
ELGO-enheten gir en kort akustisk tilbakemelding for å bekrefte at gulvdataene er registrert.
6) – Gjenta forrige punkt til den laveste etasjen er nådd.
7) – Etter opptak av de Posisjon i bunnen på spilleplaten viser en "BOTTOM" blinkende melding, flytt kabinen til det laveste punktet på sjakten (kabin på bufferne).
Trykk samtidig OPP- og NED-knappen på inspeksjonsboksen 3 ganger for å registrere den laveste posisjonen inne i ELGO. Dette punktet er opprinnelsen til magnetbåndet (0 mm vist) og vil være referansepunktet for bunngrenser (bunngrensebryter, bunninspeksjonsgrense, bunn ETSL-kontroll, etc.).
ELGO-enheten gir en lang akustisk tilbakemelding for å bekrefte registreringen av data.
I dette øyeblikket registrerer kontrolleren automatisk:
• Plassering av oppkjøpte gulv;
• Dørsoneposisjon, brukt av kontrolleren for å muliggjøre forbikobling av dørkontakter (foråpning / ny nivellering).
• Retardasjonsavstand, i henhold til løftehastigheten .
På spilleplaten vises en "/\" blinkende melding: Flytt heisen opp til nederste etasje. Kontrolleren vil sette ELGO i normal modus. (ikke mulig før fordi ELGO ville være på grensene for å åpne OC og låse hytta).På spilleplaten viser en "WAIT" blinkende melding i 10 sekunder, vent til vil vises etasje 0.
ELGO-enheten stopper det akustiske pipet og LED MODE begynner å blinke (1 blink per sekund).
Nå er ELGO-enheten operativ for sikkerhetskontakter:
• Elektronisk sikkerhetsutstyr (hvis tilgjengelig)
• Elektronisk OSG.
• Endelige grensebrytere.
• Inspeksjonsgrensebrytere er ennå ikke administrert fordi heisen er i midlertidig modus.
Før normal driftsmodus er det obligatorisk å utføre en automatisk aksellæring for å stille inn riktige stoppavstander i retning oppover og nedover for hver etasje.
Automatisk læringsprosedyre (ELGO LIMAX33-CP)
9) – Heisen må være i midlertidig drift. Sett heisen i nederste etasje med halvparten av maksimal belastning.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Vri inspeksjonsvelgeren til Normal
Heisen begynner å bevege seg automatisk:
• Oppoverturer med retardasjon og stopp i hver etasje.
• Nedturer med retardasjon og stopp i hver etasje.
Når hytta kommer tilbake til nederste etasje er systemet klart til å gå inn i normal service.
After automatic learning procedure in <Positioning>, Monitorkoder du kan stille inn:
• Retardasjonsavstander i normal tjeneste for bremsekomfort
– R1S (Side 3) oppover retardasjonsavstand
– R1D (Side 2) nedadgående retardasjonsavstand
Disse verdiene settes automatisk etter automatisk innlæring i henhold til heisens hastighet (se løftehastighet og retardasjonsavstand).
• Stoppavstander i akselens inspeksjon
– I_LIM_S oppover stoppavstand før toppetasjeposisjon
– I_LIM_D nedadgående stoppavstand før nederste etasjeposisjon
I redusert hode/grop må disse verdiene vurderes i henhold til det forhåndsutløste sikkerhetssystemet.
• Stoppavstander i normal tjeneste
– N_LIM_S oppover stoppavstand etter toppetasjeposisjon
– N_LIM_D nedadgående stoppavstand etter bunnposisjon
Disse verdiene settes automatisk etter automatisk innlæring i en avstand lik 30 mm fra ekstreme gulv (i tilfelle mindre avstand fra referansepunkter regnes det som midtpunktet mellom ekstreme gulv og ekstreme referanseposisjoner).
• ELGO+eSGC pre-trigger posisjon
– TRIPS-avstand fra topp Referanseposisjon der eSGC elektrisk kommando tvinger kabinen til å stoppe (kun for redusert hodeløft).
– TRIPD-avstand fra bunn Referanseposisjon der eSGC elektrisk kommando tvinger kabinen til å stoppe (kun for installasjon med redusert grop)
Disse verdiene er lesebeskyttede verdier og er større enn 0 mm bare hvis ELGO er en del av det forhåndsutløste sikkerhetssystemet (sammen med elektrisk sikkerhetsutstyr / overhastighetsregulator).
DMG Encoder eller Motor Encoder: Automatisk læringsprosedyre for gulv
Etter installasjonen og under MIDLERTIDIG DRIFT-modus, utfører kontrolleren et antall opp-/nedover-testkjøringer (først høy hastighet, deretter lav hastighet med stopp ved gulv) med det formål å lære den nøyaktige gulvplasseringen.
Selvlærende prosedyre:
1) - Sørg for at installasjonen er i "midlertidig drift"-modus
2) – Sørg for at koderen sporer riktig kjøreretning, (øker avstanden når den er oppover, minker avstanden når den er nedover); om nødvendig, i "posisjonering"-menyen sett parameteren Posisjoneringssystem fra klokken til mot klokken (eller omvendt) og lagre den nye innstillingen.

3) – Sjekk riktig avlesning av ZP (dørsone) inngang (ZP LED på PLAYPAD-modulen må lyse når du er i dørsonen)
4) – Kontroller riktig avlesning av AGB/AGH (retardasjonsgrensebrytere) innganger (AGB/AGH må være åpen når i retardasjonsgrenseposisjoner)
5) – Sørg for at hytta er i nederste etasje (AGB åpen, ZP LED på)
6) – Gå inn i "Posisjonering"-menyen, velg Auto-innstillingsparameteren og skriv inn:
- På DMG-enkoderen: enkoderens oppløsning (64 eller 100 pulser i henhold til enkodermodellen), deretter lengden på gulvmagnetene. (Dørsonens lengde). Bekreft det totale antallet etasjer, og trykk deretter på "Ja" for å starte prosedyren.
• På motorens koder: koderoppløsningen, motorforholdet, trekkhjulet og tauet. Bekreft det totale antallet etasjer, og trykk "Ja" for å starte prosedyren.
7) – Sett inspeksjonspanelvelgeren på NORMAL (hvis tilgjengelig), ellers sørg for at sikkerhetskjeden er lukket.
Systemet utfører følgende automatiske prosedyre:
• Beveger seg oppover, til signalet ZP i underetasjen er deaktivert
• Beveger seg nedover til signalet ZP i underetasjen er aktivert
• Flytte opp med høy hastighet og posisjonsdeteksjon for hver etasje (nedre kant av dørsonemagneter); den nøyaktige posisjonen til den nedre kanten av magneten er lagret i kontrollerminnet.
• Når man når det øverste retardasjonspunktet (AGH) bytter systemet til lav hastighet og når det når dørsonen i toppetasjen (ZP) stopper det.
• Bevegelse ned med høy hastighet og posisjonsdeteksjon for hver etasje (øvre kant av dørsonemagneter); den nøyaktige posisjonen til magnetens øvre kant er lagret i kontrollerminnet.
• Når det nedre retardasjonspunktet (AGB) nås, går systemet til lav hastighet, og når det når dørsonen i nederste etasje (ZP) stopper det.
• Flytte opp sakte ned og stoppe i hver etasje (på ZP-magnetnivå)
• Flytte ned sakte ned og stoppe i hver etasje (på ZP-magnetnivå)
Etter det andre settet med kjøringer (som ender i nederste etasje), er installasjonen klar til å gå inn i SERVICE-modus.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
MERK : selvlæringsprosedyren må utføres hver gang enten AGB/AGH-grensebrytere og/eller dørsonemagneter flyttes fra sin opprinnelige posisjon.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH avstander er nok for løftehastigheten. Er det mulig å øke/minske retardasjonsavstander i Normal service R1S og R1D uten å måtte gjenta Automatisk læringsprosedyre.
Bruk for AGB/AGH-posisjoner og retardasjonsavstander bord i henhold til heisens hastighet.
I systemer der minimumskravene i toppen og bunnen av sjakten er garantert i henhold til kravene i forskriften EN 81, er det mulig å bruke to parametere for å stoppe heisen i Inspeksjon.
In <Positioning>, Monitorkoder
• I_LIM_S oppover stoppavstand før toppetasjeposisjon
• I_LIM_D nedadgående stoppavstand før bunnetasjeposisjon
Disse stoppavstandene er gyldige for inspeksjon fra sjakten (er ikke aktive ved inspeksjon fra maskinrom) og kan brukes for å unngå risikoen for at teknikeren blir fanget inne i heissjakten.
Husk at disse stoppposisjonene ikke er sikkerhetskontakter.
Selvlærende prosedyre:
1) - Sørg for at installasjonen er i "midlertidig drift"-modus
2) – Sørg for at koderen sporer riktig kjøreretning, (øker avstanden når den er oppover, minker avstanden når den er nedover); om nødvendig, i "posisjonering"-menyen sett parameteren Posisjoneringssystem fra klokken til mot klokken (eller omvendt) og lagre den nye innstillingen.
3) – Sjekk riktig avlesning av ZP (dørsone) inngang (ZP LED på PLAYPAD-modulen må lyse når du er i dørsonen)
4) – Kontroller riktig avlesning av AGB/AGH (retardasjonsgrensebrytere) innganger (AGB/AGH må være åpen når i retardasjonsgrenseposisjoner)
5) – Sørg for at hytta er i nederste etasje (AGB åpen, ZP LED på)
6) – Gå inn i "Posisjonering"-menyen, velg Auto-innstillingsparameteren og skriv inn:
- På DMG-enkoderen: enkoderens oppløsning (64 eller 100 pulser i henhold til enkodermodellen), deretter lengden på gulvmagnetene. (Dørsonens lengde). Bekreft det totale antallet etasjer, og trykk deretter på "Ja" for å starte prosedyren.
• På motorens koder: koderoppløsningen, motorforholdet, trekkhjulet og tauet. Bekreft det totale antallet etasjer, og trykk "Ja" for å starte prosedyren.
7) – Sett inspeksjonspanelvelgeren på NORMAL (hvis tilgjengelig), ellers sørg for at sikkerhetskjeden er lukket.
Systemet utfører følgende automatiske prosedyre:
• Beveger seg oppover, til signalet ZP i underetasjen er deaktivert
• Beveger seg nedover til signalet ZP i underetasjen er aktivert
• Flytte opp med høy hastighet og posisjonsdeteksjon for hver etasje (nedre kant av dørsonemagneter); den nøyaktige posisjonen til den nedre kanten av magneten er lagret i kontrollerminnet.
• Når man når det øverste retardasjonspunktet (AGH) bytter systemet til lav hastighet og når det når dørsonen i toppetasjen (ZP) stopper det.
• Bevegelse ned med høy hastighet og posisjonsdeteksjon for hver etasje (øvre kant av dørsonemagneter); den nøyaktige posisjonen til magnetens øvre kant er lagret i kontrollerminnet.
• Når det nedre retardasjonspunktet (AGB) nås, går systemet til lav hastighet, og når det når dørsonen i nederste etasje (ZP) stopper det.
• Flytte opp sakte ned og stoppe i hver etasje (på ZP-magnetnivå)
• Flytte ned sakte ned og stoppe i hver etasje (på ZP-magnetnivå)
Etter det andre settet med kjøringer (som ender i nederste etasje), er installasjonen klar til å gå inn i SERVICE-modus.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
MERK : selvlæringsprosedyren må utføres hver gang enten AGB/AGH-grensebrytere og/eller dørsonemagneter flyttes fra sin opprinnelige posisjon.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH avstander er nok for løftehastigheten. Er det mulig å øke/minske retardasjonsavstander i Normal service R1S og R1D uten å måtte gjenta Automatisk læringsprosedyre.
Bruk for AGB/AGH-posisjoner og retardasjonsavstander bord i henhold til heisens hastighet.
I systemer der minimumskravene i toppen og bunnen av sjakten er garantert i henhold til kravene i forskriften EN 81, er det mulig å bruke to parametere for å stoppe heisen i Inspeksjon.
In <Positioning>, Monitorkoder
• I_LIM_S oppover stoppavstand før toppetasjeposisjon
• I_LIM_D nedadgående stoppavstand før bunnetasjeposisjon
Disse stoppavstandene er gyldige for inspeksjon fra sjakten (er ikke aktive ved inspeksjon fra maskinrom) og kan brukes for å unngå risikoen for at teknikeren blir fanget inne i heissjakten.
Husk at disse stoppposisjonene ikke er sikkerhetskontakter.
Videoopplæring
Hvordan konfigurere ELGO posisjoneringssystem med en kontroller Pitagora 4.0






