(v 2.2)
O Sistema de Posicionamento Autónomo para os visores DMG das séries Raffaello, Giotto e Matisse permite mostrar a posição e a direção do elevador independentemente do controlador. A interface utiliza os sinais dos sensores instalados na parte superior da cabina do elevador.
Se disponível, é possível utilizar os mesmos sensores de posição utilizados pelo controlador.
Se NÃO estiver disponível, é necessário instalar:
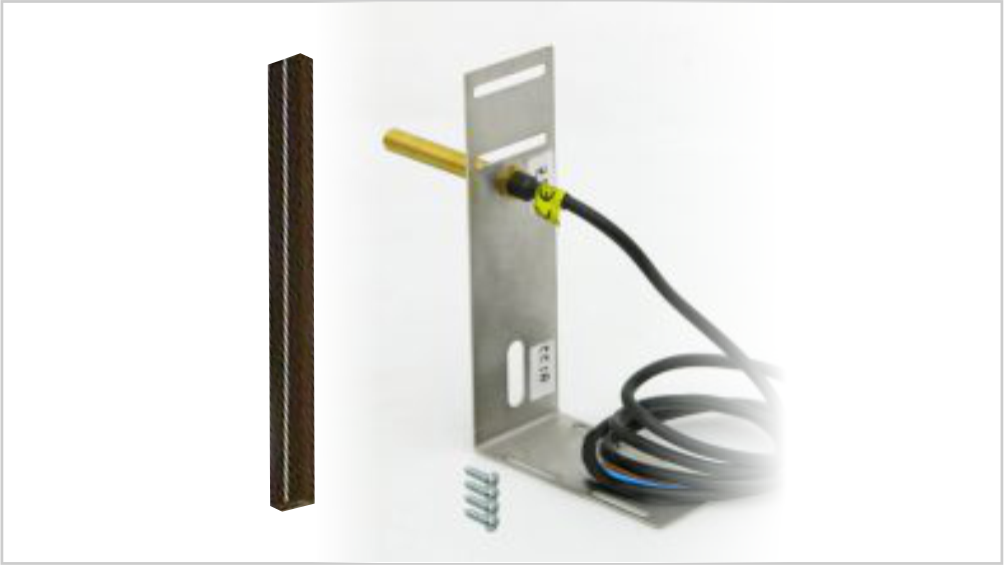
a) – 1 sensor magnético (normalmente aberto) na cabina + 1 íman em cada piso para contar a posição.
b) – 1 sensor magnético (normalmente aberto/fechado) na cabina + 1 íman no piso principal para o RESET.
Nesta interface existe uma linha serial CAN BUS para controlar os indicadores de posição do piso.
Para todas as outras funções (sintetizador de voz, gongo, indicadores, etc.), consulte o manual do utilizador do visor.
Precauções de segurança e utilização
Antes de instalar os nossos produtos, recomendamos que consulte a secção sobre precauções de segurança e utilização no link abaixo.

Instruções para transferência bancária
O sistema de contagem autónomo com visores requer dois sensores, um para contagem e outro para reinicialização. Abaixo está uma tabela com o número e o tipo de ímanes a serem utilizados.
| Velocidade do elevador: | < 2 m/s | um íman de 15 cm por paragem + 1 íman para reinicialização. |
| Velocidade do elevador: | ≥ 2 m/s | um íman de 30 cm por paragem + 1 íman para reinicialização. |
Conexão com sinal de zona de porta única
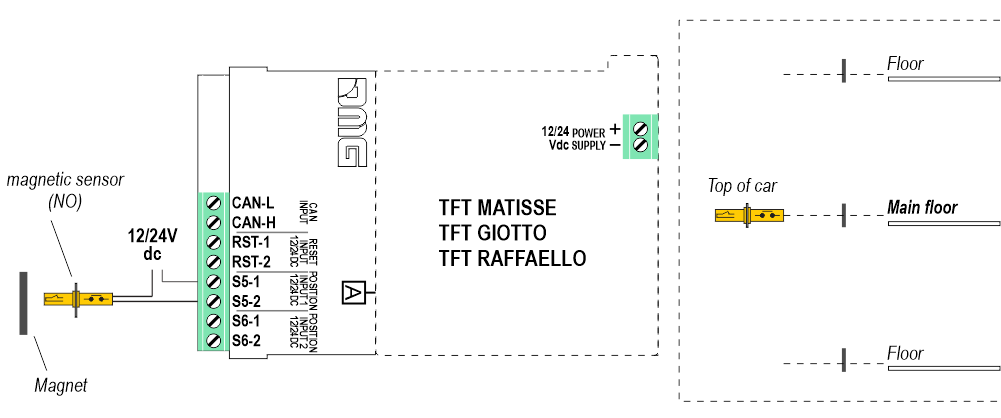
A posição da cabina do elevador muda sempre que o sensor passa em frente aos ímanes.
Quando disponível, o sensor da zona da porta já presente na instalação pode ser utilizado.
Ligação com sinal de zona de porta dupla
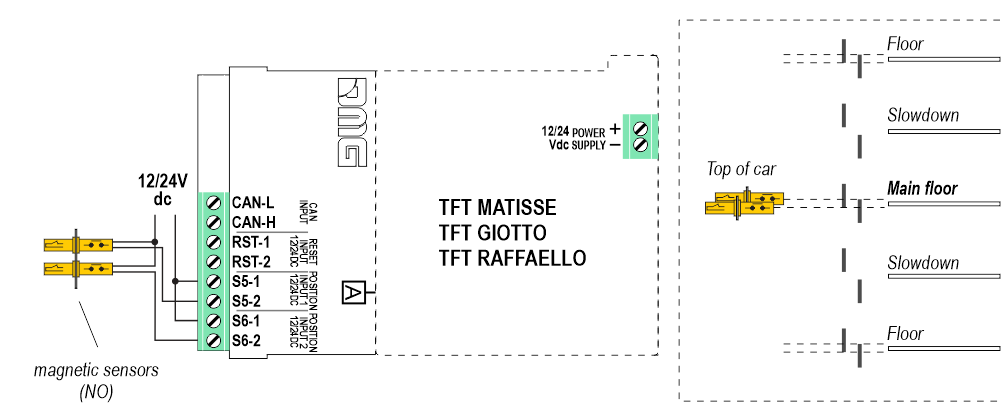
A posição da cabina do elevador muda quando os sensores passam em frente aos ímanes quando são ativados simultaneamente.
Válido apenas no caso de sensores magnéticos já instalados no sistema.
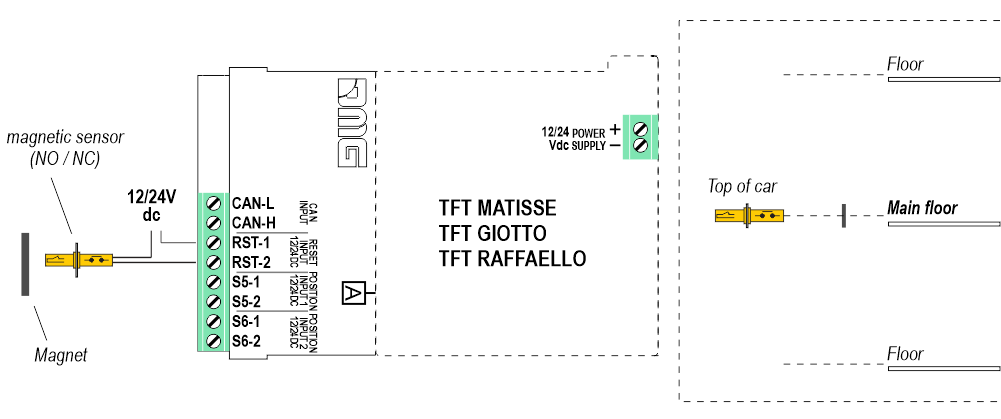
Conexão do circuito RESET
A interface necessita de um RESET para a restauração inicial e para uma eventual restauração devido a um encerramento do sistema.
RESET com sensor magnético (NO ou NC)
Quando disponível, o sensor de reinicialização já presente na instalação pode ser utilizado.
A reinicialização ocorre sempre que a cabine do elevador atinge o piso principal/mais baixo.
A reinicialização ocorre sempre que a chamada do piso principal/inferior é atendida quando a luz do botão se apaga.
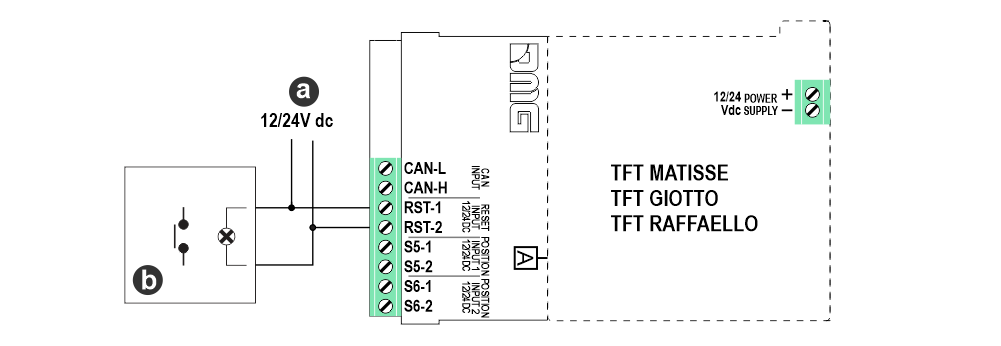
a) – Saída da lâmpada do controlador
b) – Luz do botão do piso principal
Conexão da interface com indicadores de posição do piso
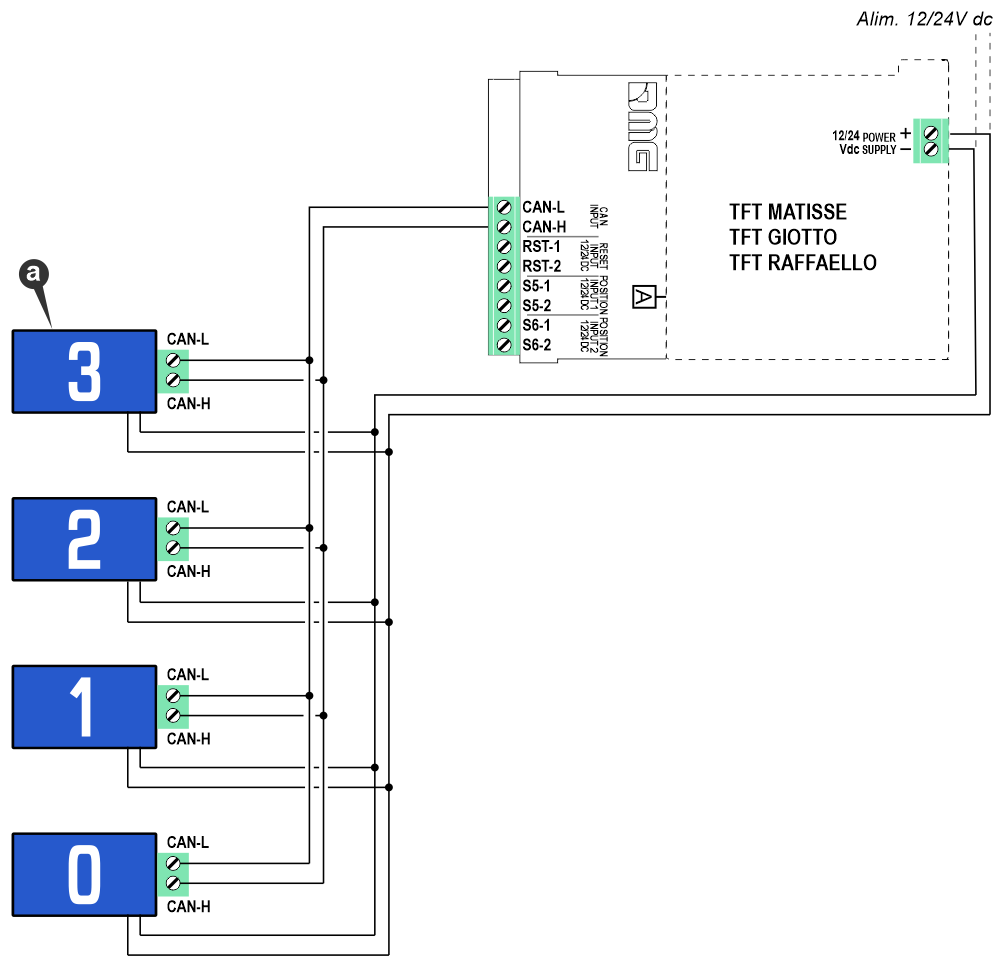
a) – Indicadores de posição do piso (apenas interface CAN)
Configurações
Redefinir configuração
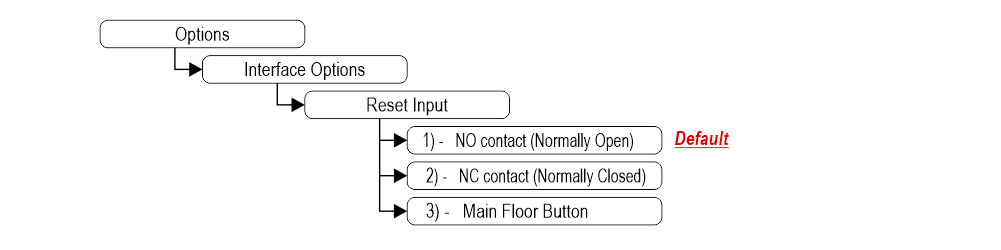
1) – Contacto normalmente aberto (ver«Ligações > Reinicialização com sensor magnético»)
2) – Contacto normalmente fechado (ver«Ligações > Reinicialização com sensor magnético»)
3) – Botão do piso principal (Consulte«Fiação > Reiniciar com a luz do botão do piso principal»)
Configuração do tipo de zona da porta
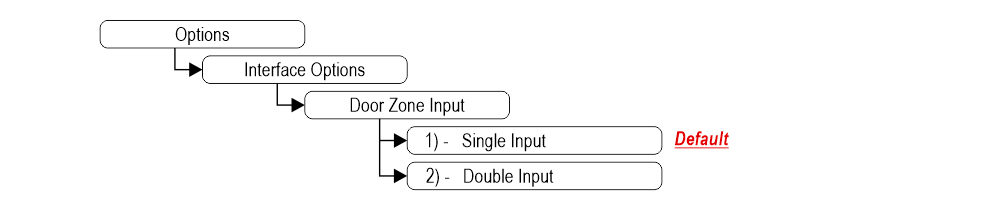
1) – Entrada única (Consulte«Ligações > Ligação com sinal de zona de porta única»)
2) – Entrada dupla (ver«Ligações > Ligação com sinal de zona de porta dupla»)
Definição do limite de velocidade da seta
Ficha técnica
| Fonte de alimentação | 12/24 V CC |
| Número de paragens controláveis | -9 / 99 |
| Velocidade máxima do sistema | Até 2 m/s com íman de 15 cm para contagem de andares De 2 m/s a 4 m/s com íman de 30 cm para contagem de andares |
| Posição da fonte de alimentação/entrada de reinicialização | 12/24 V CC Optoisolado |
| Linha serial para indicadores de posição de aterragem | Protocolo CAN BUS 10 kbps DMG |
| Temperatura de funcionamento | -10 °C ÷ +50 °C |
Acessórios

1 Kit de sensores magnéticos

8 Ímanes para kit de contagem (15 cm)

4 Ímanes para kit de contagem (30 cm)
Fonte de alimentação de 24 V
Download
| Referência | Versão | Link |
|---|---|---|
| 1.9 | Download (Inglês) | |
| Repor com sensor magnético (revisão) | 2.0 | Download (Inglês) |
| Velocidade máxima do sistema (revisão) | 2.1 | Download (Inglês) |
| Conexão com sinal de zona de porta única | 2.2 (versão atual) | Download (Inglês) |