
Utilización del codificador magnético de cable DMG o del codificador de motor
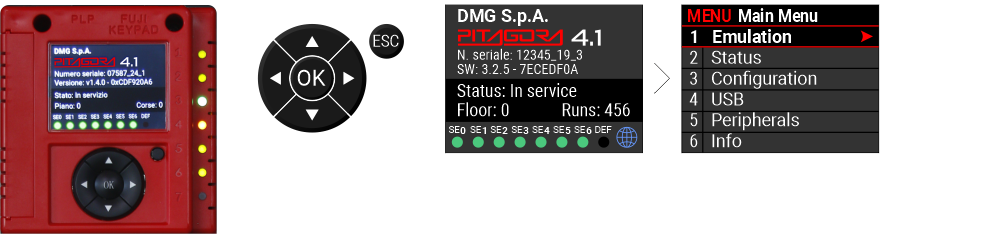
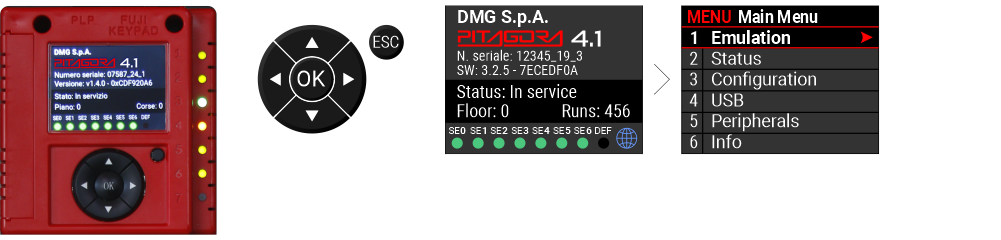
Desde el menú principal, acceda al menú Emulación.
Menú principal > Emulación
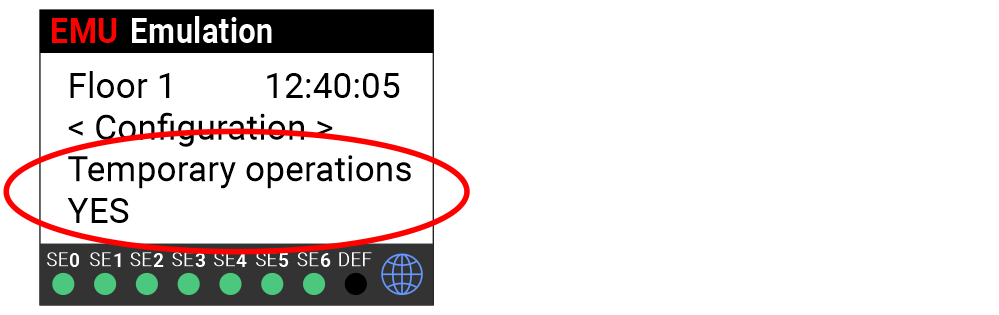
(1) - Compruebe que el elevador está en funcionamiento temporal.
Menú principal > Emulación > Configuración > Operaciones temporales > SÍ

(2) - Compruebe que la dirección del movimiento de la cabina corresponde al aumento o disminución del valor (mm).
Menú principal > Emulación
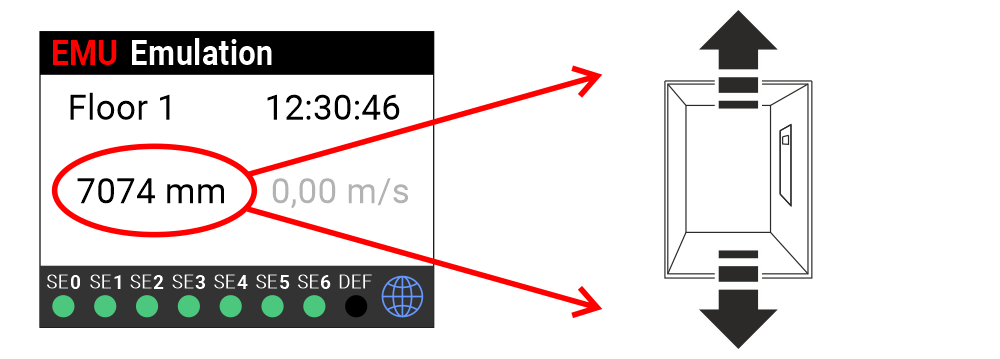
El valor aumenta a medida que el vehículo se desplaza hacia arriba.
El valor disminuye a medida que el vehículo se desplaza hacia abajo.
Vaya al paso 4.
El valor aumenta a medida que el vehículo se desplaza hacia abajo.
El valor disminuye a medida que el vehículo se desplaza hacia arriba.
Vaya al paso 3.
(3) - Invertir el sentido de giro del encoder.
Menú principal > Emulación > Posicionamiento > Sistema de posicionamiento > Encoder Antihorario

(4) - Compruebe que los LED (AGH, ZP, AGB) se encienden cuando pasa el coche.
Menú principal > Emulación > Estado de E/S > Playboard IN/OUT > página 7/9
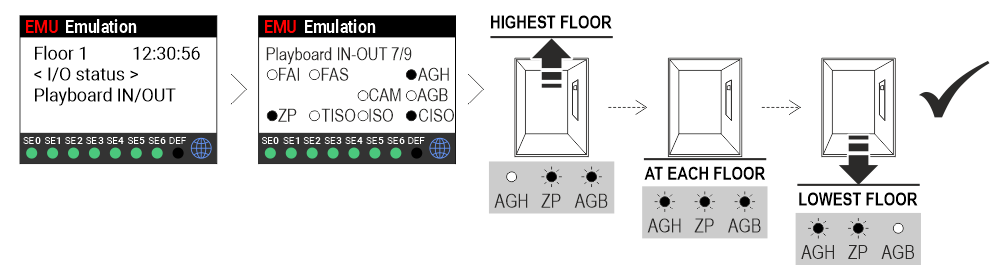
Mueva el coche hasta la planta más alta (AGH) y, a continuación, pase por todas las plantas intermedias hasta llegar a la planta más baja (AGB).
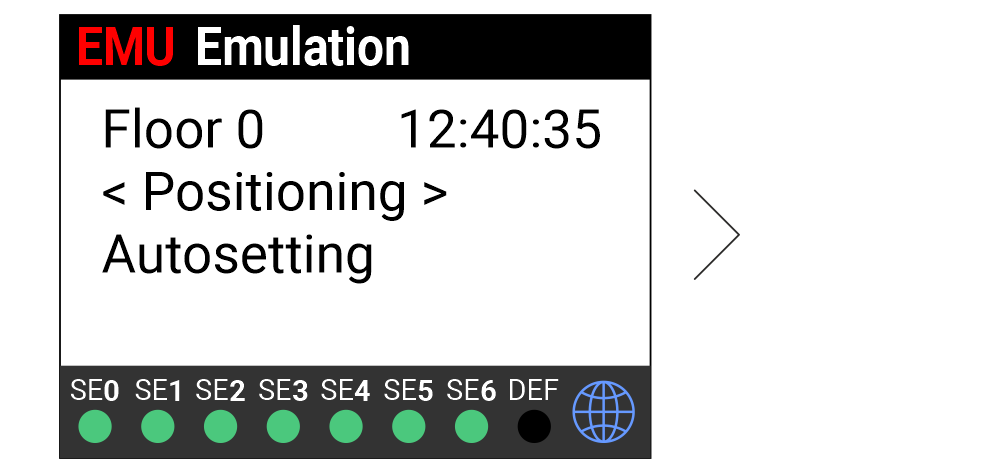
(5) - Inicio del procedimiento automático
Menú principal > Emulación > Posicionamiento > Autosetting > SÍ
Durante el procedimiento, el sistema requiere la introducción de parámetros específicos en función del tipo de codificador (codificador magnético de cable DMG o codificador de motor).
Uso del codificador magnético de cable DMG
Enter / Check:
Pulse N.: resolución del encoder
ZP Lenght: 150 mm
No.of floors: número de plantas
Max speed (of the lift)
Autosetting: velocidad de aprendizaje
Uso del codificador del motor
Enter / Check:
Pulse N.: resolución del codificador del motor
Motor Ratio: relación de reducción de la máquina
Traction pulley: diámetro de la polea de tracción (en mm)
Roping: relación de cuerda directa/indirecta del ascensor
No.of floors: número de plantas
Max speed (of the lift)
Autosetting: velocidad de aprendizaje

Utilización del encoder absoluto ELGO LIMAX 33 CP
Desde el menú principal, acceda al menú Emulación.
Menú principal > Emulación
(1) - Compruebe que el elevador está en funcionamiento temporal.
Menú principal > Emulación > Configuración > Operaciones temporales > SÍ
(2) - Gire el selector del panel de control a la posición INSPECCIÓN

(3) - Mueva el coche a la posición más alta en el eje
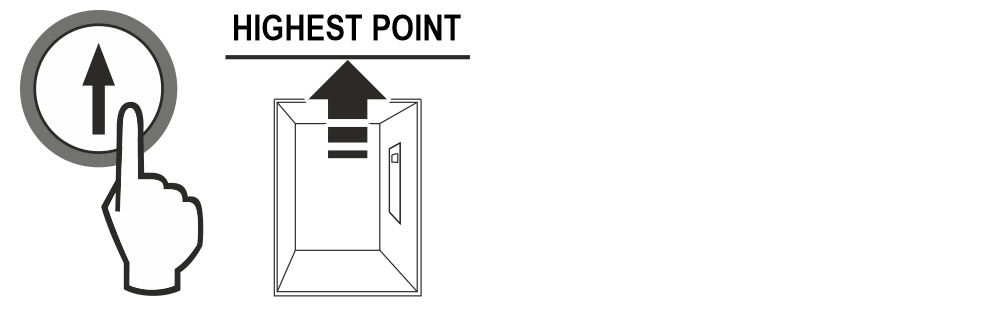
Contrapeso en los topes
o Pistón tocado fondo.
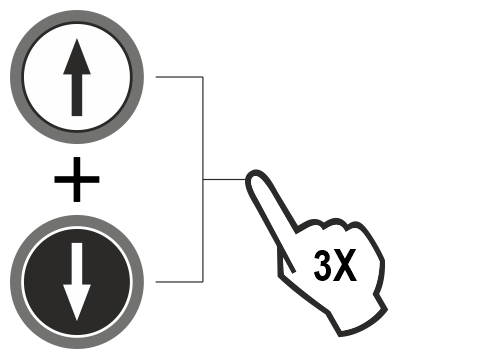
(4) - Ponga el ELGO en modo 'Aprendizaje Manual'.

- Pulse los botones ARRIBA y ABAJO simultáneamente tres veces.
- Aparece el mensaje "WAIT" en el panel de reproducción.
- El ELGO comienza a emitir un pitido cada 2 segundos. Esta señal acústica estará activa durante todo el procedimiento de aprendizaje Manual.
- Aparece el mensaje "TOP" en el panel de reproducción.
(5) - Almacenamiento del punto extremo más alto
- Pulse los botones ARRIBA y ABAJO simultáneamente tres veces para fijar la posición más alta del sistema.
- El punto más alto del eje se almacena como referencia para todos los límites superiores (final de carrera superior, final de carrera de inspección superior, ETSL superior, etc.).
- El ELGO emite un pitido largo para confirmar el punto memorizado.
(6) - Almacenamiento del piso más alto

- Aparece el mensaje "Piso n" en el panel de reproducción.
- Mueva la cabina y alinéela con el piso más alto del sistema.
- Pulse los botones ARRIBA y ABAJO simultáneamente tres veces para fijar la posición del suelo.
- El ELGO emite un breve pitido como confirmación del punto memorizado.
(7) - Almacenamiento de los otros pisos
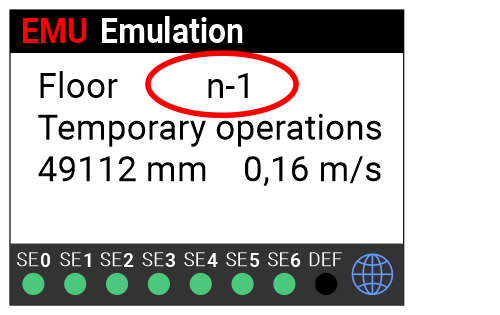
- El mensaje "Planta n-1" se muestra en el panel de reproducción (n-1 es la siguiente planta que se va a almacenar).
- Repita el procedimiento descrito en el paso (6) en cada piso, moviendo el carro hacia abajo hasta llegar al piso más bajo.
(8) - Almacenamiento del punto extremo más bajo

- El mensaje "BOTTOM" aparece en el panel de reproducción.
- Coloque la cabina en la posición más baja del sistema.
- Pulse simultáneamente tres veces los botones ARRIBA y ABAJO para fijar el punto más bajo del sistema. Este punto del eje se almacena como origen de la cinta magnética (0 mm).
- El ELGO emite un pitido largo para confirmar el punto memorizado.
(9) - Cierre del procedimiento de aprendizaje manual

- Aparece el mensaje "/\" en el panel de reproducción.
- Mueva la cabina hacia arriba, deteniéndola por encima de la posición del piso más bajo..
- El controlador pone el ELGO en modo normal (esta operación es necesaria porque, de lo contrario, el sistema estaría en el límite final)
- El mensaje "WAIT" aparece en el panel de reproducción.
- Transcurridos unos 10 segundos, se muestra el piso 0 y se apaga la señal acústica.
(10) - Aprendizaje automático
Antes de entrar en servicio, es obligatorio realizar un procedimiento de aprendizaje automático del hueco para detectar las distancias reales de parada tanto para el ascenso como para el descenso en cada planta.
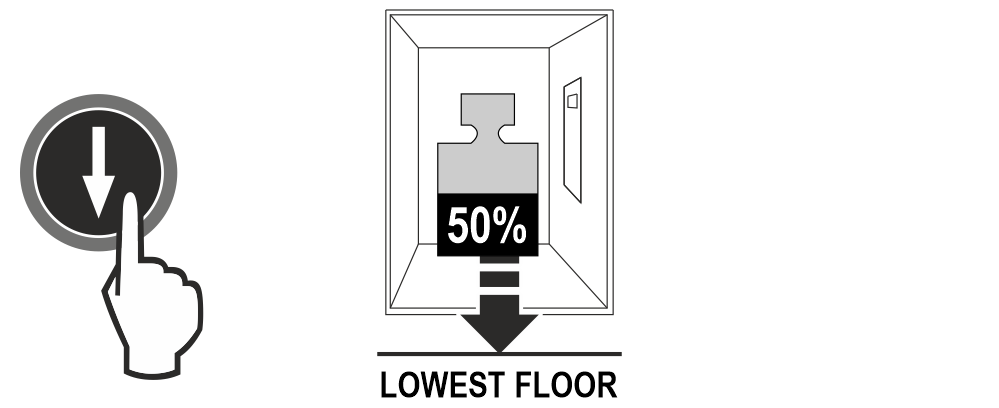
Mientras esté en funcionamiento temporal, desplace la cabina al piso más bajo (si es posible, con la cabina cargada hasta la mitad de su capacidad).
(11) - Iniciar el procedimiento de aprendizaje automático
Menú principal > Emulación > Posicionamiento > Autosetting > SÍ

El ascensor comienza a moverse automáticamente.
Cuando la cabina vuelve al piso más bajo, el sistema está listo para cambiar al funcionamiento normal (Funcionamiento temporal = No).