
Pitagora 4.0 -järjestelmä hallitsee kahta erityistä toimintoa, jotka edellyttävät oven avaamista:
- Tasausfunktio
- Oven avaamisen ennakkotoiminto
Molemmat toiminnot edellyttävät ohjainlaitteen sisällä olevan erityisen turvakytkimen (Q40.FNRLV – Avoimen oven turvakytkin) olemassaoloa. Sama kytkin voi palvella molempia toimintoja, jos ne ovat käytössä samanaikaisesti.
Piiri toimii samalla tavalla kuin ovialueen (ZP) toiminto.
Tasausominaisuus on pakollinen hydraulisissa järjestelmissä ja valinnainen vetohississä. Se tulee pakolliseksi myös vetohisseissä, kun rakenteellisesti ei ole mahdollista taata kaapeleiden pidentämistä siten, että ne pysyvät aina EN81.20-standardin edellyttämien lattian tasausrajojen sisällä (+/-20 mm lattian kynnyksestä).
Ennakko-avaus-toiminto mahdollistaa oven avaamisen ennakoimisen suhteessa kerroksen saavuttamishetkeen (liikekoskettimien pudotus), ja sitä pidetään lisävarusteena nopeissa ja/tai korkealaatuisissa järjestelmissä.
Molemmat toiminnot edellyttävätinkrementaalista paikannusjärjestelmää tai absoluuttisen paikannusjärjestelmänjärjestelmää (perinteistä magneettilukijaa käyttävää paikannusjärjestelmää ei suositella). Vain hydraulijärjestelmissä on mahdollista yhdistää tasapainotusfunktio magneettilukijajärjestelmään.
Asennusohjeet
Molemmat toiminnot edellyttävät RZPA-magneettilukijan ja magneettien asentamista kunkin kerroksen porraskäytävään. Magneettilukijan 3 metrin kaapeli on kytkettävä TOC-laatikon ZP2-tuloon:
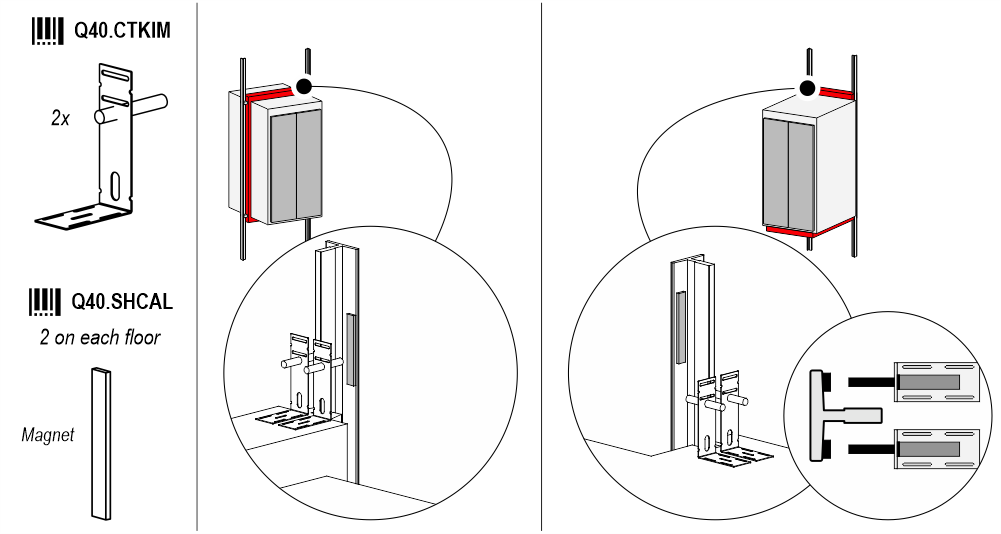
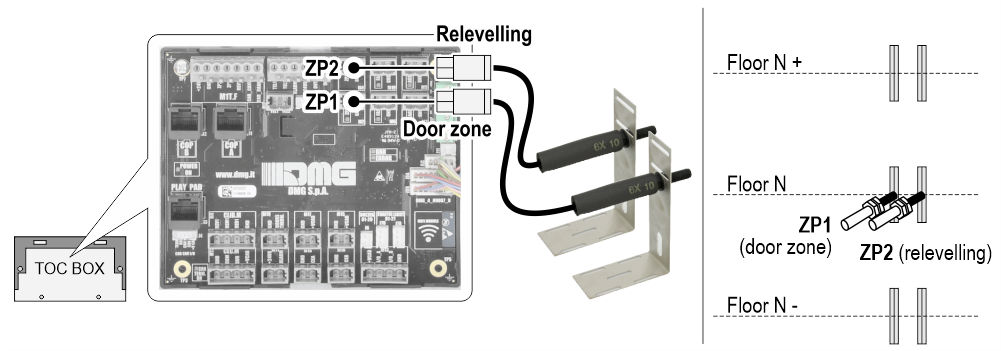
Katso lisätietoja pika-asennusoppaasta.
Asennus ja käyttö
Uudelleentasaus
Tasaus-toiminto koostuu hissikabinin tasausliikkeestä laskeutumistasolla, joka suoritetaan hitaalla nopeudella ja ovet auki, ja jonka tarkoituksena on kompensoida mahdollinen epätasaisuus (rako) laskeutumiskynnyksen ja hissikabinin kynnyksen välillä, kun hissikabini pysähtyy kerroksessa.
Pitagora 4.0 -ohjain tarjoaa kolme erilaista tasausliikettä, jotka eroavat toisistaan liikkeen alkutoleranssin suhteen itseoppimisvaiheessa määriteltyyn lattian pysäytystasoon nähden:
- Tyyppi 1: liikkeen toleranssin alaraja +/- 10 mm. Tämä valinta sopii paremmin VVVF-hissien vetovoimaan, jotta pysähtymistarkkuuden osalta voidaan taata EN81.20-standardin täysi noudattaminen.
- Tyyppi 20: käynnistystoleranssi +/- 20 mm. Tämä valinta sopii parhaiten hydraulisiin hissiin, koska se mahdollistaa suuremman toleranssin kerroksen pysäytystarkkuudessa.
- Tyyppi 10+20: käynnistystoleranssi +/- 20 mm, kun hissikori on ovet kiinni, ja +/-10 mm, kun hissikori on ovet auki. Tämä ratkaisu on yhdistelmä kahdesta edellisestä, ja sitä suositellaan hydraulihisseille, jotta vältytään liian tiheiltä tasapainotusliikkeiltä tarjoamalla suurempi toleranssi, kun hissikorin ovet ovat kiinni (ja hissikori siten mahdollisesti tyhjä).
Käytä parametria A8 – Uudelleentasaus konfigurointivalikossa aktivoidaksesi toiminnon haluamallasi valinnalla.
Ennakko-avaus
Ennakko-avaus-toiminto tarkoittaa oven avaussignaalin aktivointia ennen hissin pysähtymistä kerroksessa (ja siten ennen liikennekontaktien deaktivointia) tarkasti määritellyllä saapumisalueella, joka on samanlainen (tai sama) kuin oven alue.
Käytä parametria B18 – Ovien ennakkoavaus Ovet-valikossa tämän toiminnon ottamiseksi käyttöön.
Avoimien ovien toiminnan vaikutukset laitokseen
Molemmat toiminnot katsotaan avoimiksi toiminnoiksi, ja niitä on hallinnoitava turvallisesti ja tietyin ehdoin.
Ensinnäkin ohjauspaneelissa on oltava kyseiseen toimintoon tarkoitettu asianmukainen turvalaite. Yksi laite riittää, vaikka kaksi toimintoa esiintyisivät samanaikaisesti.
Toiseksi, koska avoimen oven toiminta aiheuttaa vaaran matkustamon hallitsemattomasta liikkeestä, järjestelmässä on oltava UCMP-suojauspiiri.
Mahdollisen ongelman havaitseminen avoimen oven toimintojen turvallisuusmoduulin toiminnan valvonnassa aiheuttaa ISO-estovirheen, joka edellyttää erityistä nollausmenettelyä.