
El sistema Pitagora 4.0 gestiona dos funciones específicas que requieren una maniobra con las puertas abiertas:
- Función de nivelación
- Función de apertura anticipada de puertas
Ambas funciones requieren la presencia de un circuito de seguridad dedicado dentro del controlador (Q40.FNRLV - Circuito de seguridad de puerta abierta). El mismo circuito puede servir para ambas funciones si están presentes al mismo tiempo.
El circuito funciona de forma similar a la función Zona de puerta (ZP).
La función de renivelación es obligatoria para los sistemas hidráulicos y opcional para los ascensores de tracción. También es obligatoria para los ascensores de tracción cuando, por diseño, no es posible garantizar una extensión de los cables tal que permanezcan siempre dentro de los límites de alineación con el suelo exigidos por la norma EN81.20 (+/-20 mm desde el umbral del suelo).
La función de Apertura Anticipada permite anticipar el inicio de la apertura de la puerta respecto al momento de llegada al suelo (caída de los contactores de recorrido), y se considera opcional para sistemas rápidos y/o de alta gama.
Ambas funciones requieren unSistema de Posicionamiento Incremental o un Posicionamiento Absolutoning System para su correcto funcionamiento (el sistema tradicional de posicionamiento por lector magnético no está indicado). Sólo en el caso de sistemas hidráulicos es posible hacer coincidir la función de Nivelación con el sistema de lectura magnética.
Instrucciones de instalación
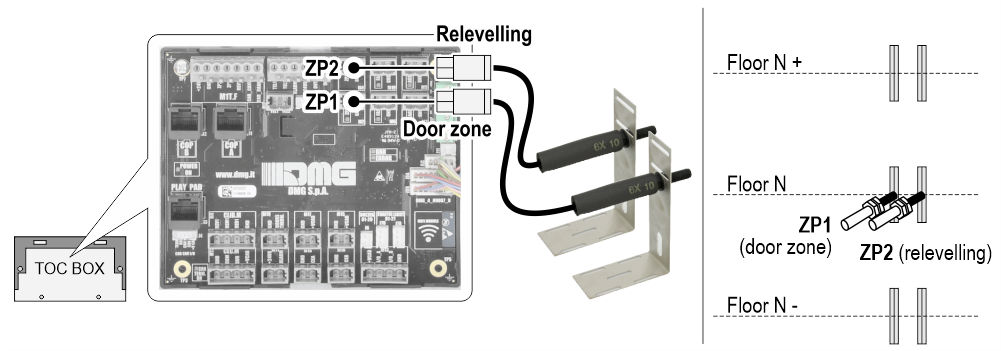
Ambas funciones requieren la instalación en el hueco del lector magnético RZPA y de imanes para cada rellano. El cable de 3 m del lector magnético debe enchufarse en la entrada ZP2 de la caja TOC:
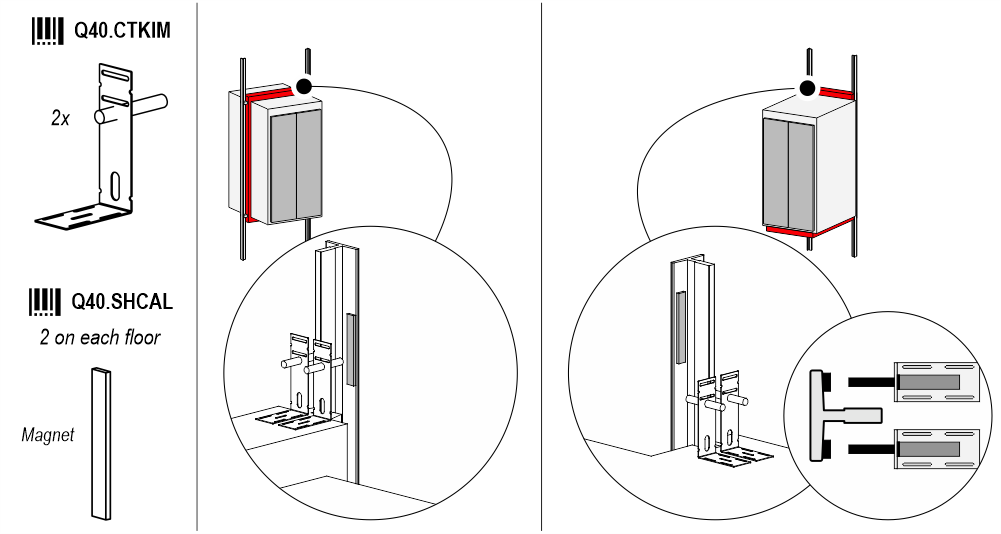
Consulte la Guía de instalación rápida para obtener más información.
Instalación y uso
Desbloqueo
La función Releveling consiste en la activación de una maniobra de realineamiento de la cabina en el nivel de aterrizaje, realizada a baja velocidad y con las puertas abiertas, destinada a compensar cualquier desalineamiento (holgura) entre el umbral de aterrizaje y el umbral de la cabina cuando ésta se detiene en el suelo.
El controlador Pitagora 4.0 ofrece tres tipos de maniobras de renivelación, que se diferencian entre sí por la tolerancia de inicio de la propia maniobra respecto al nivel de parada en el suelo definido en la fase de autoaprendizaje de la maniobra:
- Tipo 1: tolerancia de arranque de la maniobra +/- 10mm. Esta selección está más indicada para los ascensores de tracción VVVF para garantizar el pleno cumplimiento del código EN81.20 en lo que se refiere a la precisión de parada.
- Tipo 20: tolerancia de arranque +/- 20 mm. Esta selección es la más adecuada para ascensores hidráulicos, ya que permite una mayor tolerancia en la precisión de parada en el suelo.
- Tipo 10+20: tolerancia inicial +/- 20mm con cabina con puertas cerradas y +/-10mm con cabina con puertas abiertas. Esta solución es una combinación de las dos anteriores y se recomienda para ascensores hidráulicos con el fin de evitar maniobras de relanzamiento demasiado frecuentes, proporcionando una mayor tolerancia cuando las puertas de la cabina están cerradas (y, por tanto, posiblemente vacías).
Utilice el parámetro A8 - Nivelación en el menú de configuración para activar la función con la selección deseada.
Apertura anticipada
La función de Apertura Anticipada consiste en activar la señal de apertura de la puerta antes de la parada real en el suelo de la cabina (y por tanto antes de que se desactiven los contactores de desplazamiento), dentro de una zona de llegada bien definida que es similar (o coincidente) con la zona de la puerta.
Utilice el parámetro B18 - Apertura anticipada del menú Puertas para activar la función.
Impacto de las operaciones de puertas abiertas en la instalación
Ambas funciones se consideran operaciones de puertas abiertas y deben gestionarse con seguridad y en determinadas condiciones.
En primer lugar, el panel de control debe contener un dispositivo de seguridad adecuado dedicado a la función. Basta con un único dispositivo aunque coexistan las dos funciones.
En segundo lugar, dado que una operación de puerta abierta implica el riesgo de movimiento incontrolado de la cabina, el sistema debe contar con un circuito de protección UCMP.
La detección de un posible problema en la supervisión del funcionamiento del módulo de seguridad para operaciones de puerta abierta provoca el error de bloqueo ISO, que requiere un procedimiento de rearme específico.