(версия 1.1)

Новый магнитный энкодер DMG использует датчик для определения вращения и положения магнита, установленного на оси шкива энкодера. Генерируемые импульсы принимаются и обрабатываются панелью управления лифтом, которая рассчитывает положение, направление и скорость кабины.
Меры безопасности и предостережения по использованию
Перед установкой наших продуктов мы рекомендуем вам ознакомиться с разделом о мерах безопасности и предостережениях по эксплуатации по ссылке ниже.

Установка
Советы и предупреждения
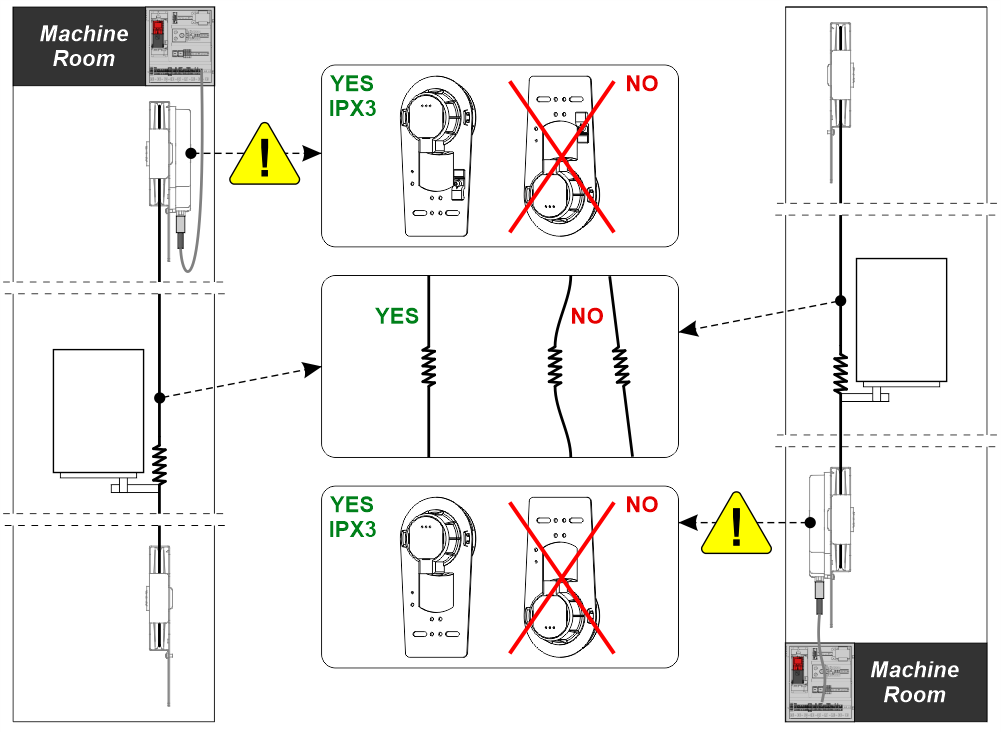
Шкив, в который встроен энкодер, должен быть установлен в верхней части вала или в яме, рядом с машинным залом.
Компоненты системы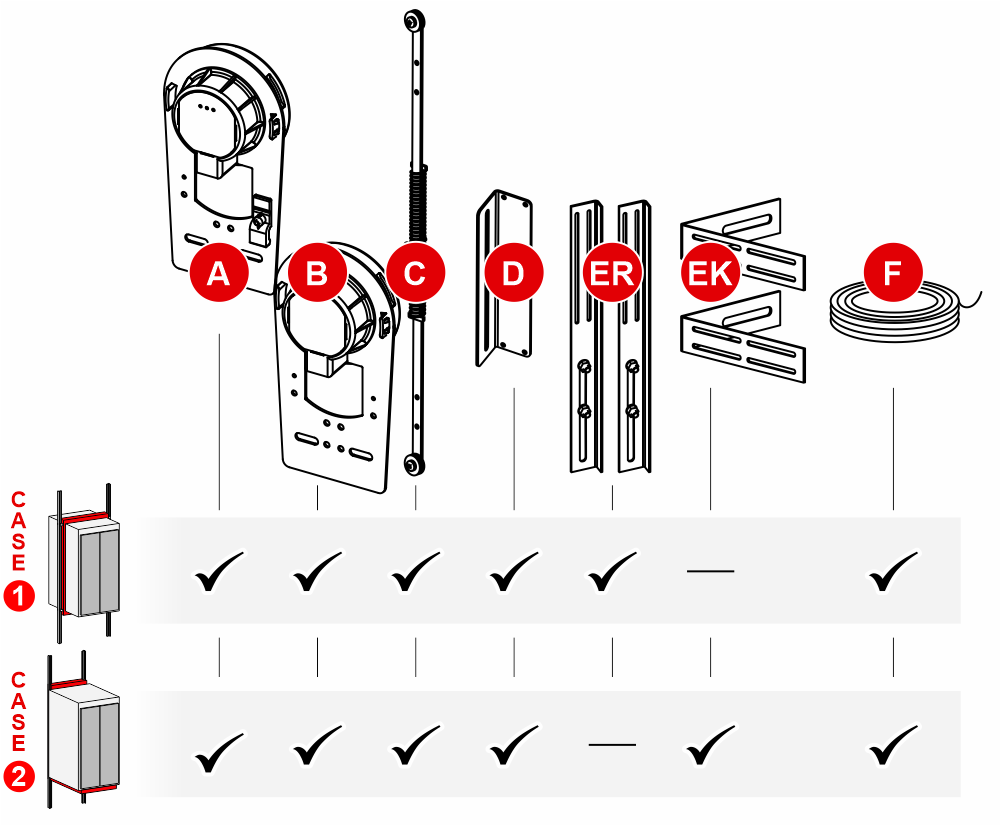
Случай 1: Лифты с каркасной механикой
Случай 2: Лифты с механикой типа «рюкзак»
A) – Это шкив энкодера, в котором находится электронная плата. Он может иметь 2 разрешения:
– 1,25 мм (100 PPR) для энкодера с красной маркировкой: для использования с контроллером Pitagora 4.0, начиная с версии прошивки 3.0.2
– 2,5 мм (50 PPR) для энкодера с синей маркировкой: для использования с контроллерами V3 / Musa / Pitagora 4.0 до версии прошивки Y
C) – При необходимости пружинный натяжитель также можно установить на верхней части кабины.
Монтаж
Монтаж зависит от механики установки.
Пример 1 – Лифты с рамочной механикой
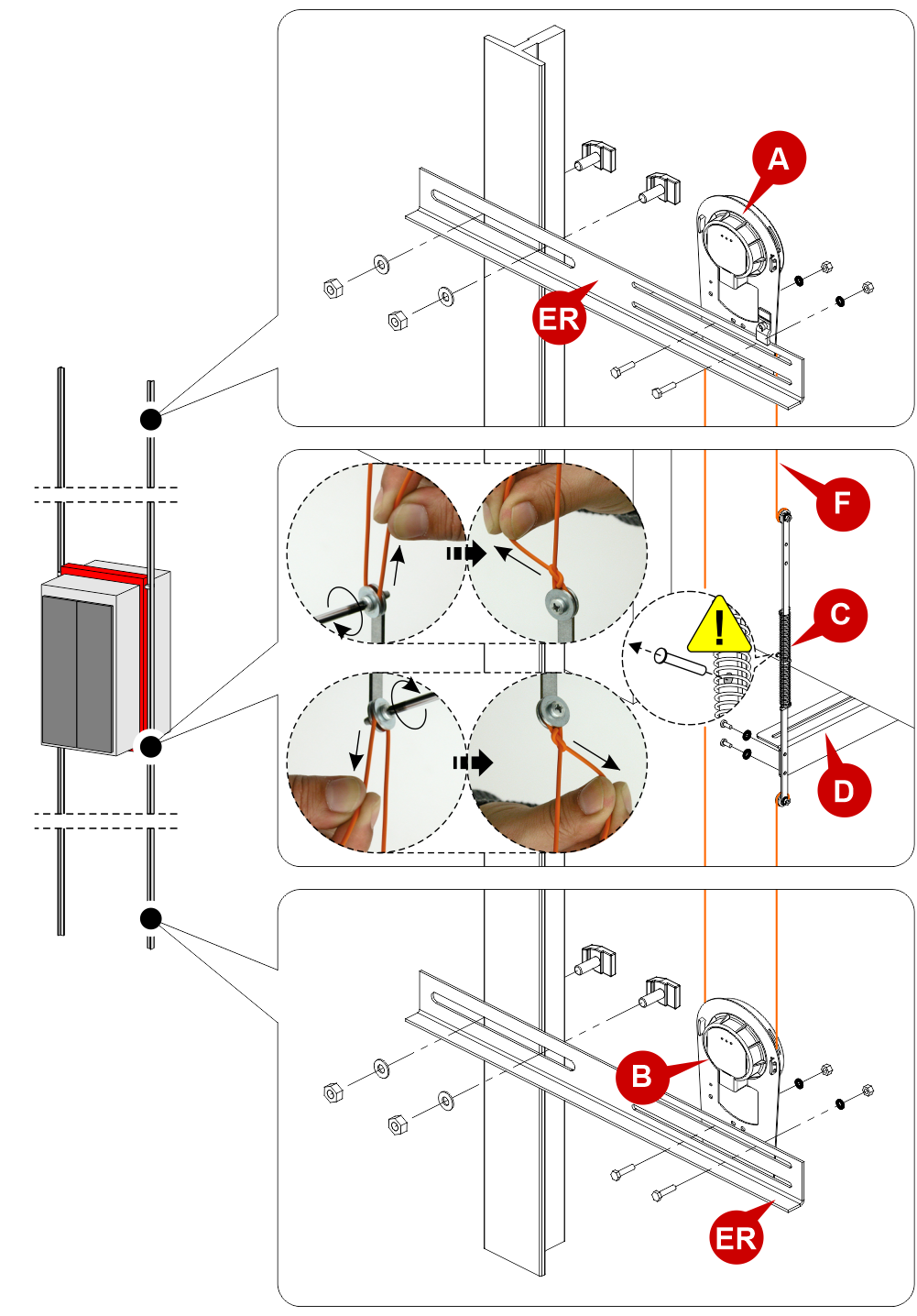
C) – Пружинный натяжитель также может быть установлен на верхней части кабины, если это необходимо.
![]() Снимайте фиксатор только после завершения установки.
Снимайте фиксатор только после завершения установки.
В случае замены на старых системах необходимо будет отвязать старую веревку и повторно натянуть ее после сборки нового датчика.
Случай 2 – Лифты с механикой типа «рюкзак»
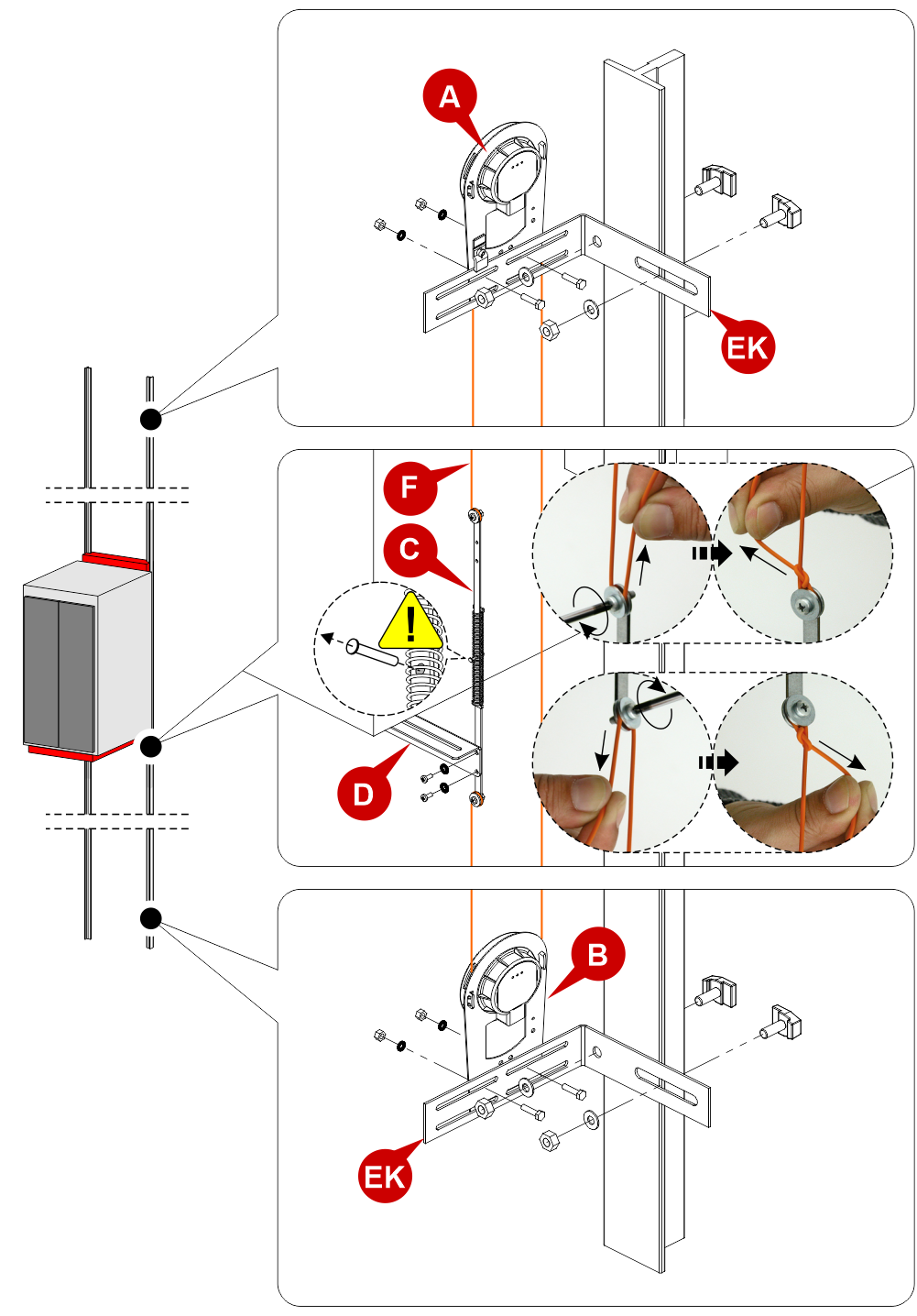
C) – Пружинный натяжитель также может быть установлен на верхней части кабины, если это необходимо.
![]() Снимайте фиксатор только после завершения установки.
Снимайте фиксатор только после завершения установки.
В случае замены на старых системах необходимо будет отвязать старую веревку и повторно натянуть ее после сборки нового датчика.
Проводка
Подключение к контроллеру Pitagora 4.0
– Начиная с версии прошивки 3.0.2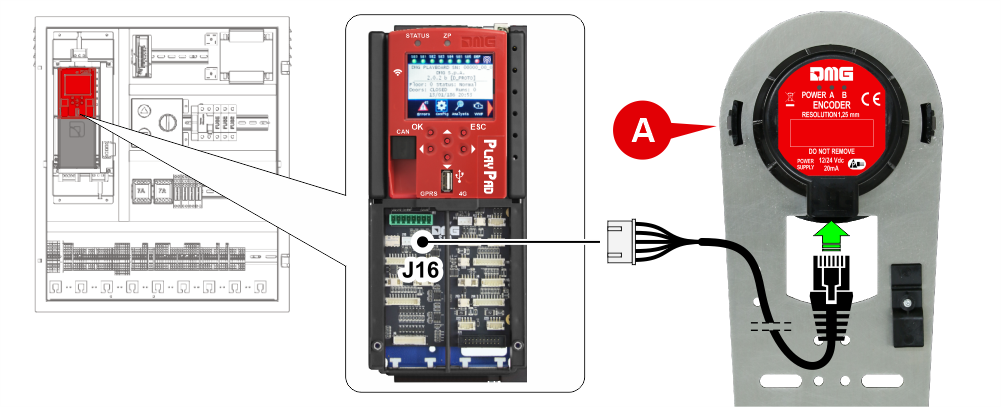 A) – Энкодер с разрешением 1,25 мм
A) – Энкодер с разрешением 1,25 мм
– До версии прошивки 3.0.1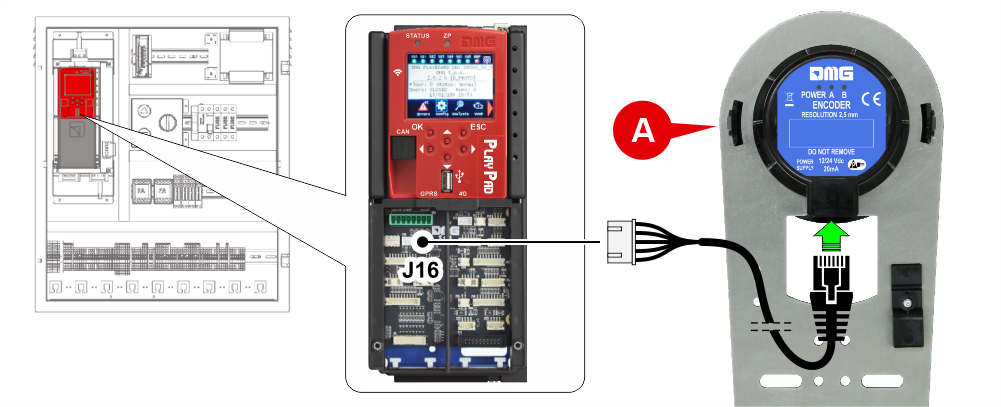 A) – Энкодер с разрешением 2,50 мм
A) – Энкодер с разрешением 2,50 мм
Подключение к существующим контроллерам MUSA / PLAYBOARD V3
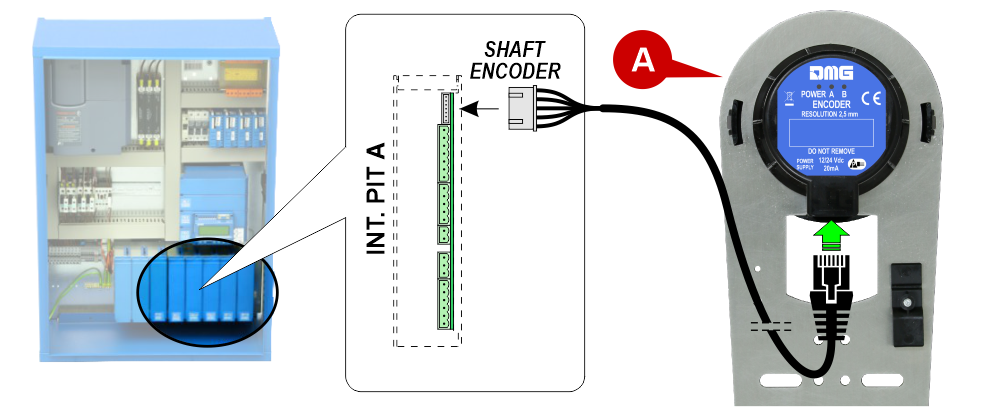
A) – Энкодер с разрешением 2,50 мм
Вы можете заменить существующий тросовый энкодер новым магнитным энкодером (разрешение 2,50 мм).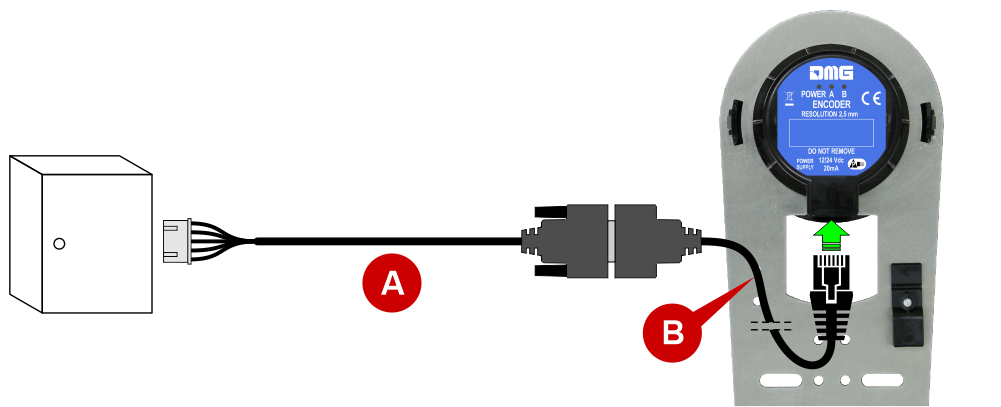
Просто оставьте существующий кабель (A) и подключите его к новому энкодеру с помощью переходного кабеля (B).
После замены датчика проверьте:
- Правильное направление вращения в режиме проверки (движение вверх, увеличение в мм, движение вниз, уменьшение в мм). При необходимости измените направление вращения с помощью контроллера, следуя этим инструкциям:
- Установите панель в «Временные операции» (меню «Конфигурация» -> «Временные операции» -> «Да»);
- Измените направление вращения в меню «Система позиционирования» -> «Система позиционирования» -> «Энкодер по часовой стрелке/против часовой стрелки»;
- Удалите временные операции (меню «Конфигурация» -> «Временные операции» -> «Нет»).
- Проверьте правильность выравнивания автомобиля на всех этажах. При необходимости отрегулируйте точность остановки с помощью контроллера в меню «Системное позиционирование» -> Положение этажа.
 Если вы заменяете старый оптический энкодер DMG на современный магнитный энкодер (50 PPR / 2,5 мм), нет необходимости повторно запоминать положения.
Если вы заменяете старый оптический энкодер DMG на современный магнитный энкодер (50 PPR / 2,5 мм), нет необходимости повторно запоминать положения.
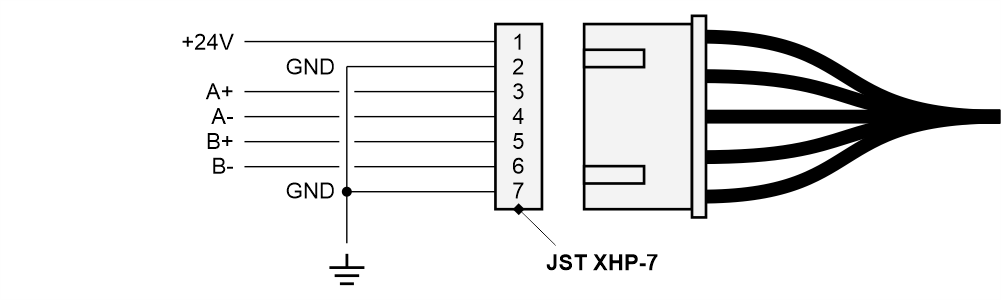
Распиновка 7-контактного разъема JST
Диагностический светодиод

ПИТАНИЕ: Если светодиод горит, энкодер питается.
A/B: Состояние выходов энкодера. Когда кабина лифта неподвижна, состояние этих светодиодов не изменяется (они могут быть как включенными, так и выключенными); когда кабина лифта движется, оба светодиода будут включены.
Download
| Ссылка | Версия | Ссылка |
|---|---|---|
| 1.0 (текущая версия) | Download « » (английский язык) | |
| Модернизация крепления для старой системы и подключение к существующим установкам | 1.1 (текущая версия) | Download « » (английский язык) |