(v 1.1)

Den nye DMG magnetiske encoder bruger en sensor til at registrere rotation og position af en magnet, der er placeret på encoderens remskiveaksel. De genererede impulser modtages og behandles af elevatorens kontrolpanel, som beregner kabinens position, retning og hastighed.
Sikkerheds- og brugsadvarsler
Inden du installerer vores produkter, anbefaler vi, at du læser afsnittet om sikkerhed og brugsforholdsregler på nedenstående link.

Installation
Råd og advarsler
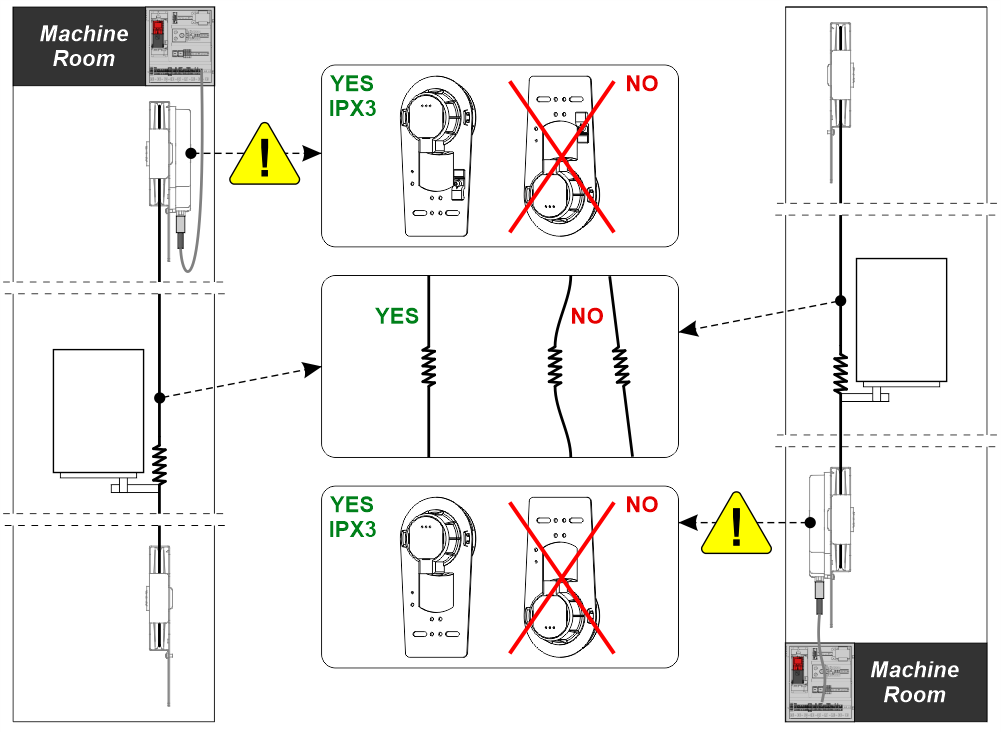
Remskiven, hvor encoderen er indbygget, skal installeres øverst på akslen eller i pitten tæt på maskinrummet.
Systemkomponenter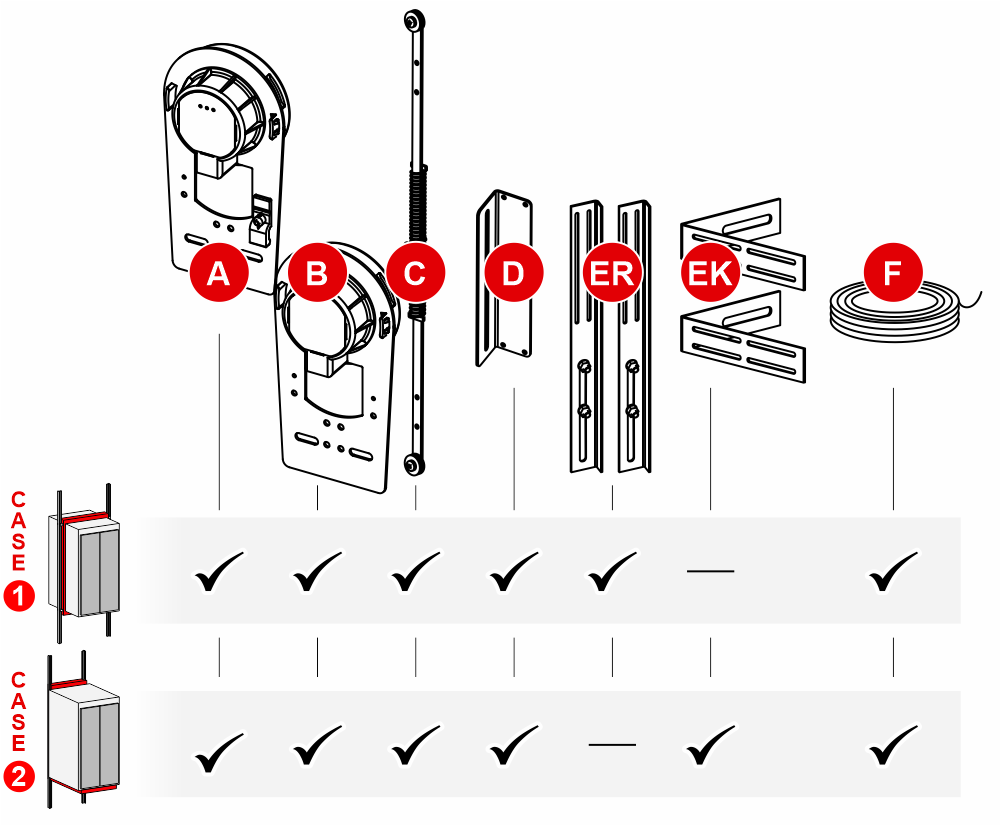
Tilfælde 1: Elevatorer med rammemekanik
Tilfælde 2: Elevatorer med rygsæksmekanik
A) – Det er enkoderhjulet, der indeholder det elektroniske kort. Den kan have 2 opløsninger:
– 1,25 mm (100 PPR) for den røde mærkede encoder: Skal bruges med Pitagora 4.0-controlleren fra firmwareversion 3.0.2
– 2,5 mm (50 PPR) til den blå mærkede encoder: Skal bruges med V3 / Musa / Pitagora 4.0-controllere op til firmwareversion Y
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
Montering
Montering afhænger af installationens mekanik.
Tilfælde 1 – Elevatorer med rammemekanik
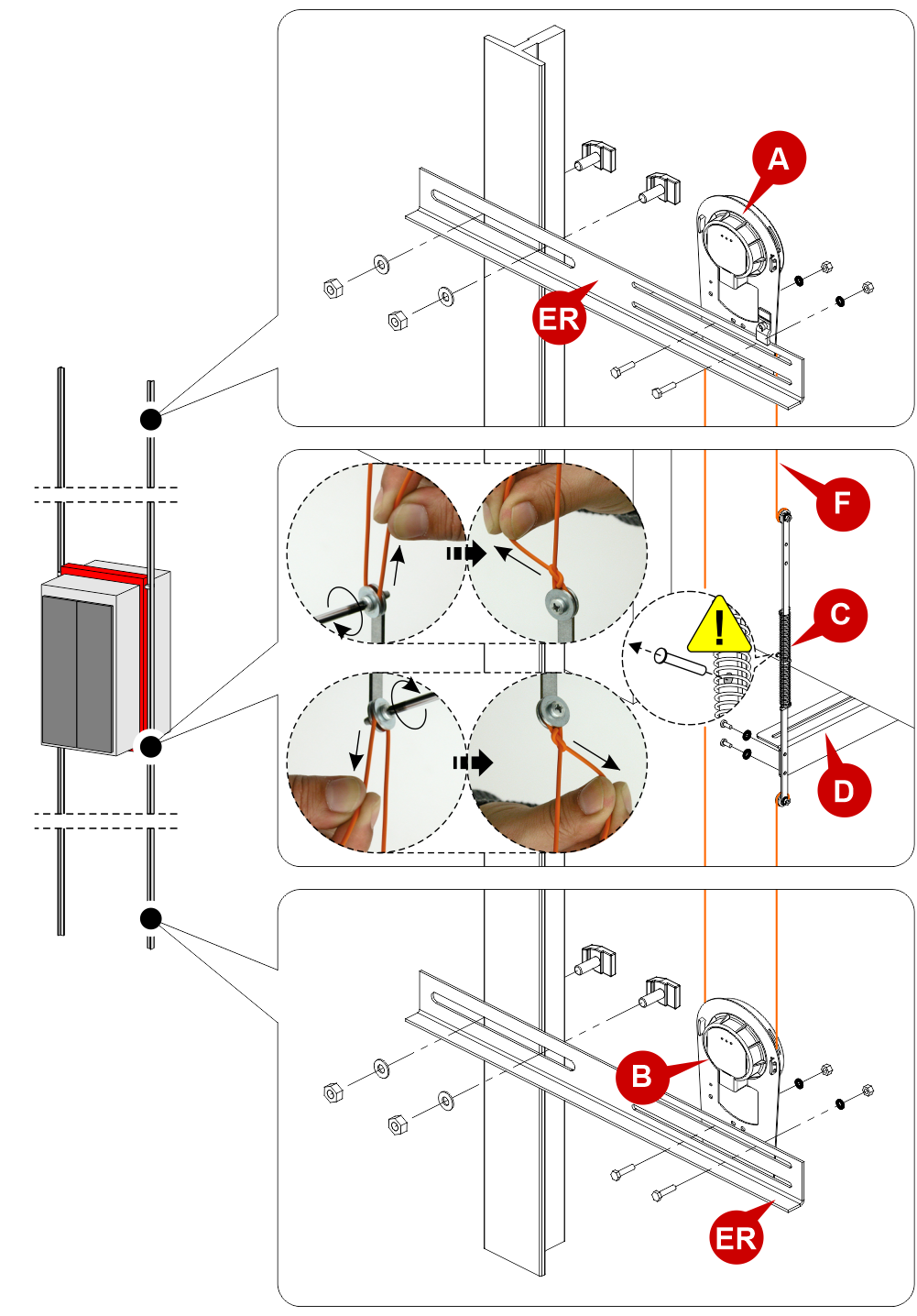
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
![]() Fjern kun holderen, når installationen er afsluttet.
Fjern kun holderen, når installationen er afsluttet.
Ved udskiftning på gamle systemer er det nødvendigt at løsne det gamle reb og spænde det igen efter montering af den nye encoder.
Tilfælde 2 – Elevatorer med rygsæksmekanik
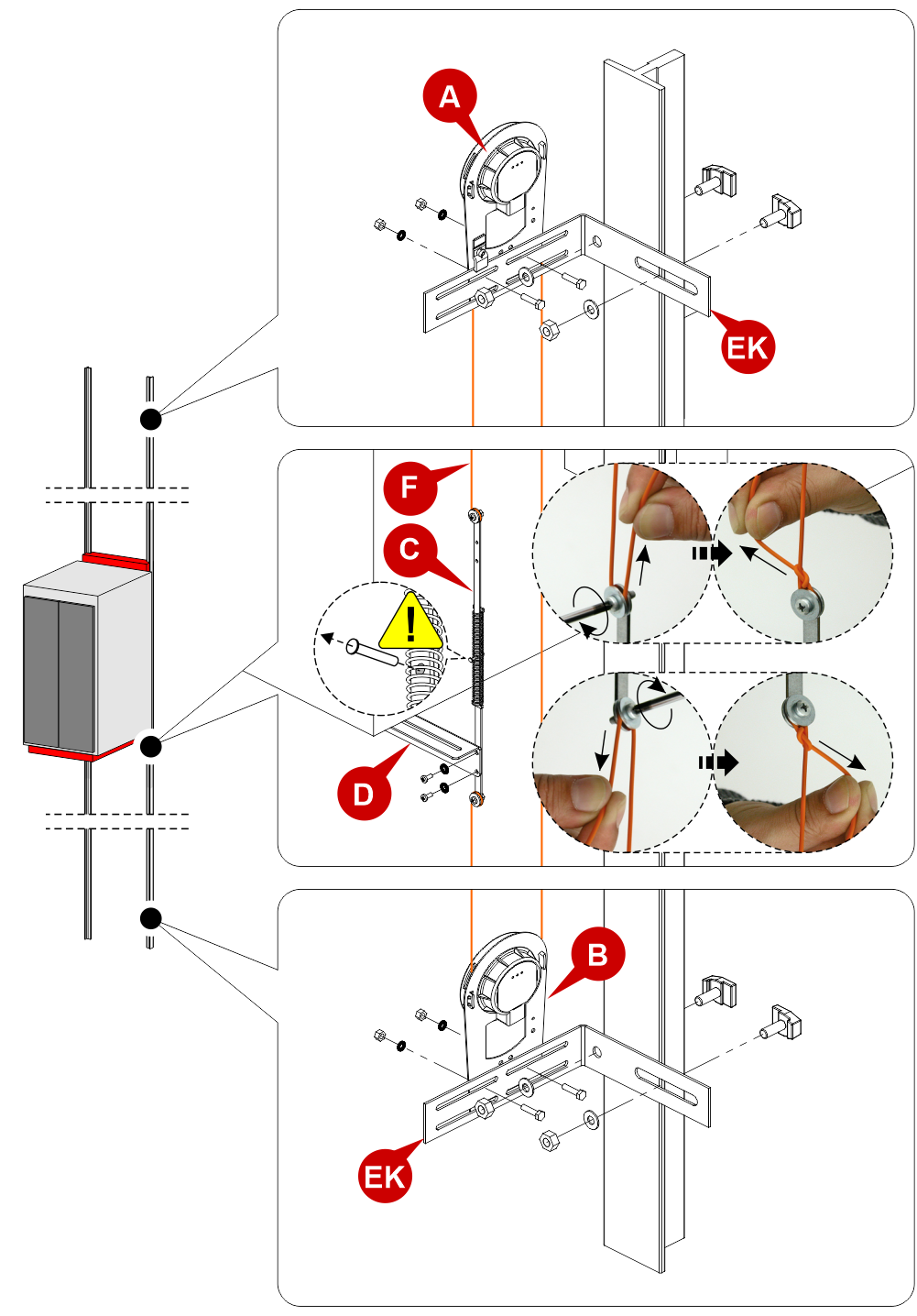
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
![]() Fjern kun holderen, når installationen er afsluttet.
Fjern kun holderen, når installationen er afsluttet.
Ved udskiftning på gamle systemer er det nødvendigt at løsne det gamle reb og spænde det igen efter montering af den nye encoder.
Ledninger
Tilslutning til Pitagora 4.0-controller
– Fra firmwareversion 3.0.2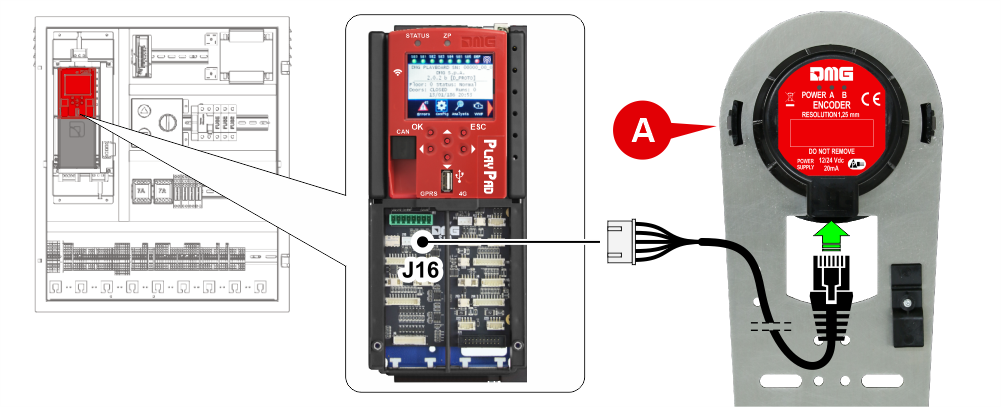 A) – Encoder med 1,25 mm opløsning
A) – Encoder med 1,25 mm opløsning
– Op til firmwareversion 3.0.1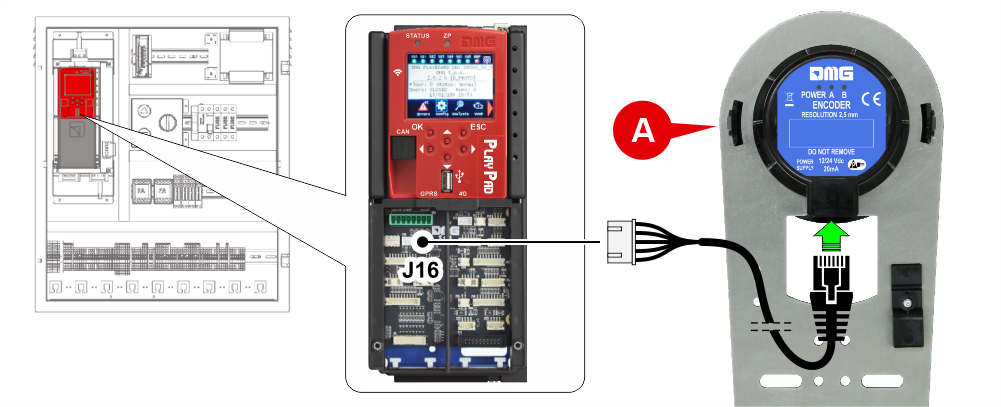 A) – Encoder med 2,50 mm opløsning
A) – Encoder med 2,50 mm opløsning
Tilslutning til eksisterende MUSA / PLAYBOARD V3-controllere
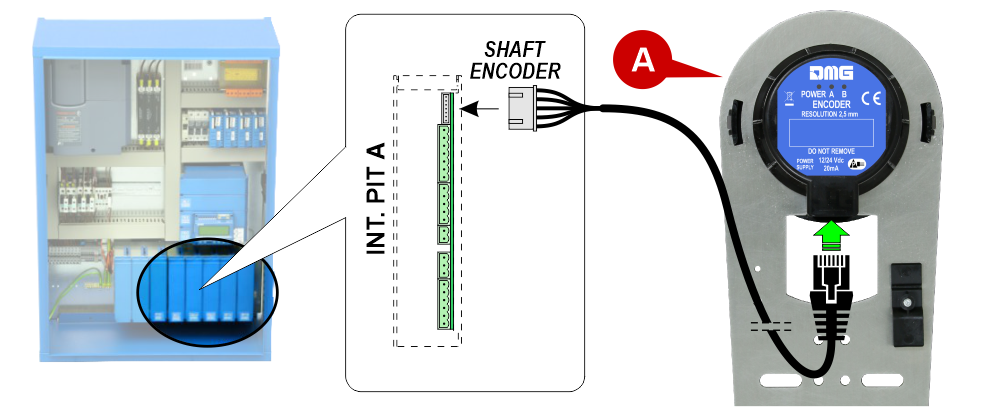
A) – Encoder med 2,50 mm opløsning
Du kan udskifte den eksisterende reb-enkoder med den nye magnetiske enkoder (2,50 mm opløsning).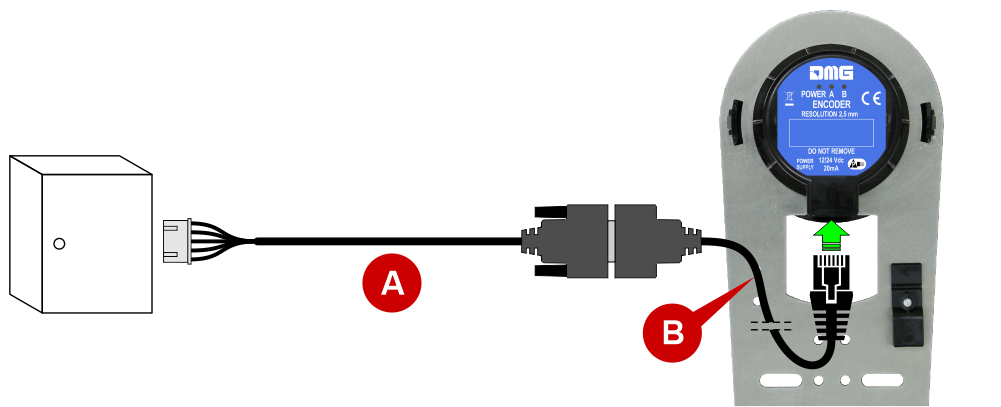
Bare lad det eksisterende kabel (A) sidde og tilslut det til den nye encoder ved hjælp af et adapterkabel (B).
Efter udskiftning af encoderen skal du kontrollere:
- Den korrekte rotationsretning i inspektionsmodus (opadgående bevægelse, stigning i mm, nedadgående bevægelse, fald i mm). Om nødvendigt kan du ændre rotationsretningen fra controlleren ved at følge disse instruktioner:
- Indstil panelet til Midlertidige operationer (Konfigurationsmenu -> Midlertidige operationer -> Ja);
- Ændr rotationen i menuen System Positioning (Systempositionering) -> Positioning System (Positioneringssystem) -> encoder med uret/mod uret;
- Fjern de midlertidige handlinger (Konfigurationsmenu -> Midlertidige handlinger -> Nej).
- Kontroller, at bilen er korrekt justeret på alle etager. Juster om nødvendigt stopnøjagtigheden fra controlleren i menuen System Positioning -> Gulvposition.
 Hvis du udskifter en gammel DMG optisk reb-enkoder med den nuværende magnetiske læser (50 PPR / 2,5 mm), er det ikke nødvendigt at genindlære positionerne.
Hvis du udskifter en gammel DMG optisk reb-enkoder med den nuværende magnetiske læser (50 PPR / 2,5 mm), er det ikke nødvendigt at genindlære positionerne.
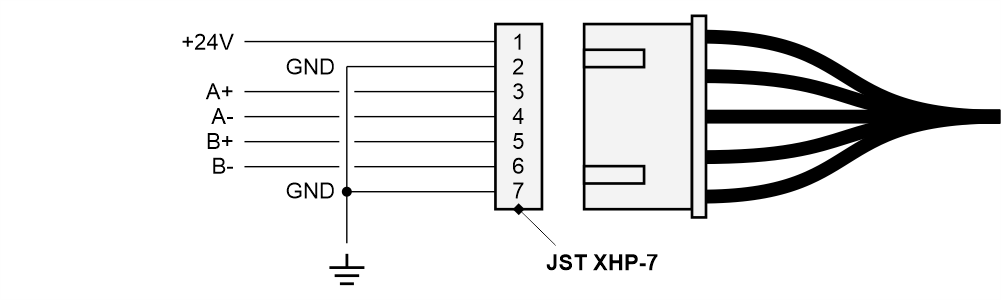
PIN OUT JST 7-polet stik
Diagnostik-LED

STRØM: Hvis LED'en lyser, er encoderen tilsluttet strøm.
A/B: Status for encoderudgange. Når elevatorstolen står stille, ændres status for disse LED'er ikke (de kan både være TÆNDT og SLUKKET); når elevatorstolen er i bevægelse, vil begge LED'er være TÆNDT.
Download
| Reference | Version | Link |
|---|---|---|
| 1.0 (aktuel version) | Download " " (engelsk) | |
| Montering af opgradering til gammelt system og tilslutning til eksisterende installationer | 1.1 (nuværende version) | Download " " (engelsk) |