(v 2.2)
Raffaello-, Giotto- ja Matisse-sarjojen DMG-näytöille tarkoitettu autonominen paikannusjärjestelmä mahdollistaa hissin sijainnin ja suunnan näyttämisen ohjaimesta riippumatta. Liitäntä käyttää hissikopion yläosaan asennettuja anturisignaaleja.
Jos saatavilla, on mahdollista käyttää samoja sijaintiantureita kuin ohjain.
Jos EI saatavilla, on asennettava:
a) – 1 magneettinen anturi (normaalisti avoin) hissikopioon + 1 magneetti jokaiseen kerrokseen sijainnin laskemiseksi.
b) – 1 magneettinen anturi (normaalisti avoin/suljettu) hissikopioon + 1 magneetti pääkerrokseen RESET-toimintoa varten.
Tässä käyttöliittymässä on CAN BUS -sarjaliitäntä lattian sijainnin ilmaisimien ohjaamiseen.
Kaikkien muiden toimintojen (äänisynteesin, gongin, ilmaisimien jne.) osalta katso näytön käyttöohje.
Turvallisuus- ja käyttöohjeet
Ennen tuotteidemme asentamista suosittelemme lukemaan turvallisuus- ja käyttöohjeet alla olevasta linkistä.

Kytkentäohjeet
Autonominen laskenta-järjestelmä näytöillä vaatii kaksi anturia, yhden laskemista ja toisen nollausta varten. Alla on taulukko, jossa on käytettävien magneettien lukumäärä ja tyyppi.
| Hissin nopeus: | < 2 m/s | yksi 15 cm:n magneetti pysähdystä kohti + 1 magneetti nollausta varten. |
| Hissin nopeus: | ≥ 2 m/s | yksi 30 cm:n magneetti pysähdystä kohti + 1 magneetti nollausta varten. |
Yhteys yhden oven vyöhykesignaalin kanssa
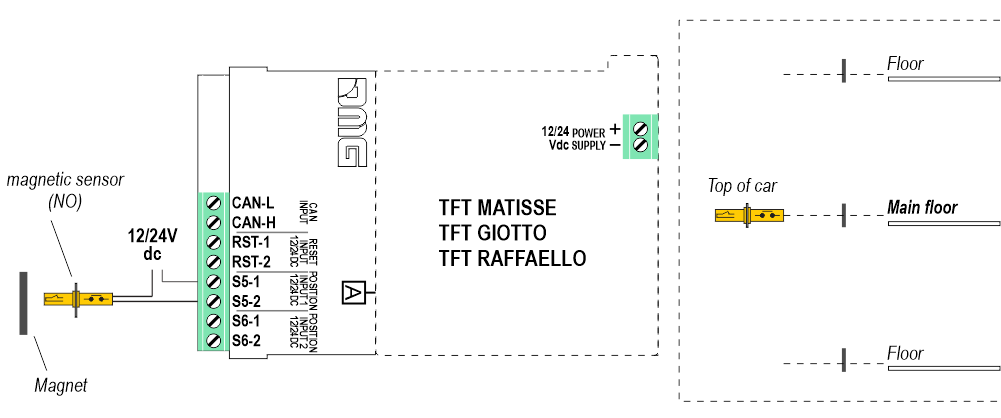
Hissikopion sijainti muuttuu joka kerta, kun anturi kulkee magneettien edestä.
Jos mahdollista, voidaan käyttää asennuksessa jo olevaa ovialueen anturia.
Yhteys kaksoisovialueen signaalilla
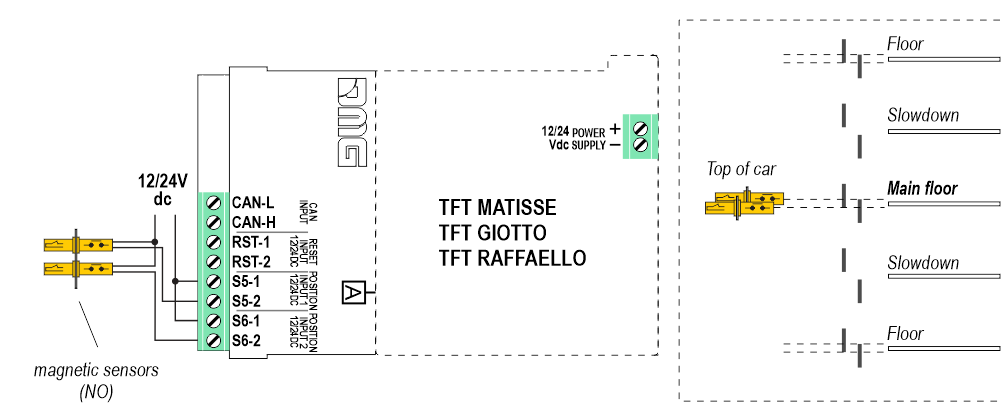
Hissikopion sijainti muuttuu, kun anturit kulkevat magneettien edestä niiden aktivoituessa samanaikaisesti.
Voimassa vain, jos magneettiset anturit on jo asennettu järjestelmään.
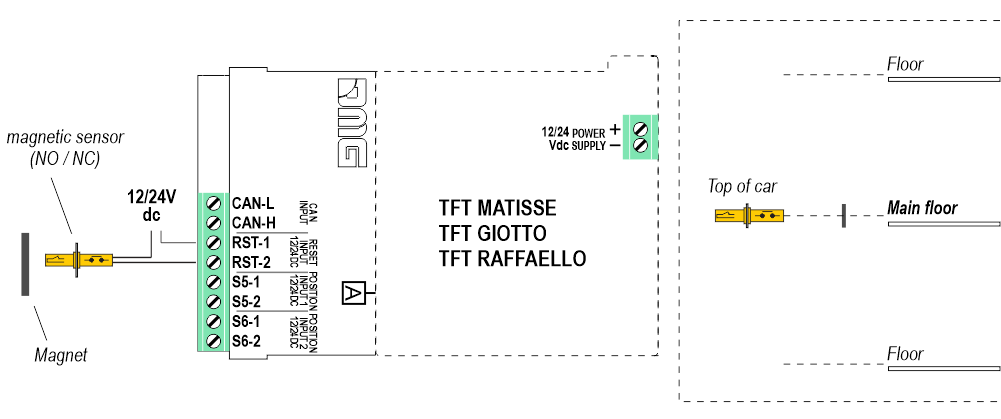
RESET-piirin liitäntä
Liitäntä tarvitsee RESET-komennon alkuperäisen palautuksen ja järjestelmän sammutuksen aiheuttaman mahdollisen palautuksen yhteydessä.
RESET magneettisella anturilla (NO tai NC)
Jos mahdollista, voidaan käyttää asennuksessa jo olevaa nollausanturia.
Nollaus tapahtuu aina, kun hissikori saavuttaa pää-/alimman kerroksen.
Nollaus tapahtuu aina, kun pää-/alimman kerroksen kutsu on hoidettu ja painikkeen merkkivalo sammuu.
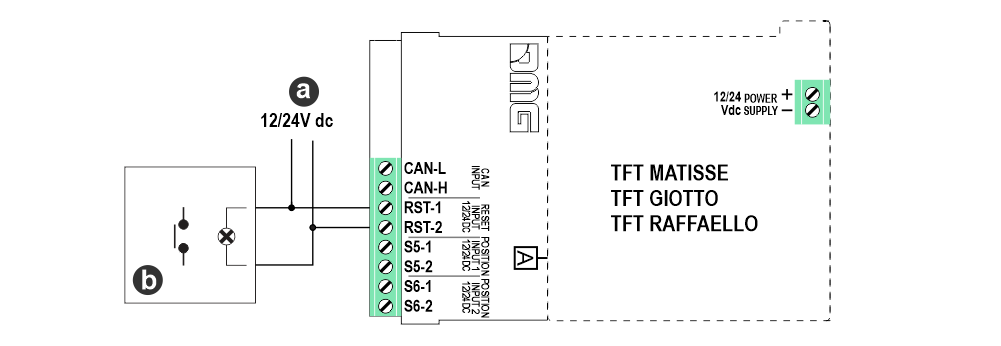
a) – Ohjaimen lampun teho
b) – Pääkerroksen painikkeen valo
Liitäntä liukukiskon sijainnin ilmaisimiin
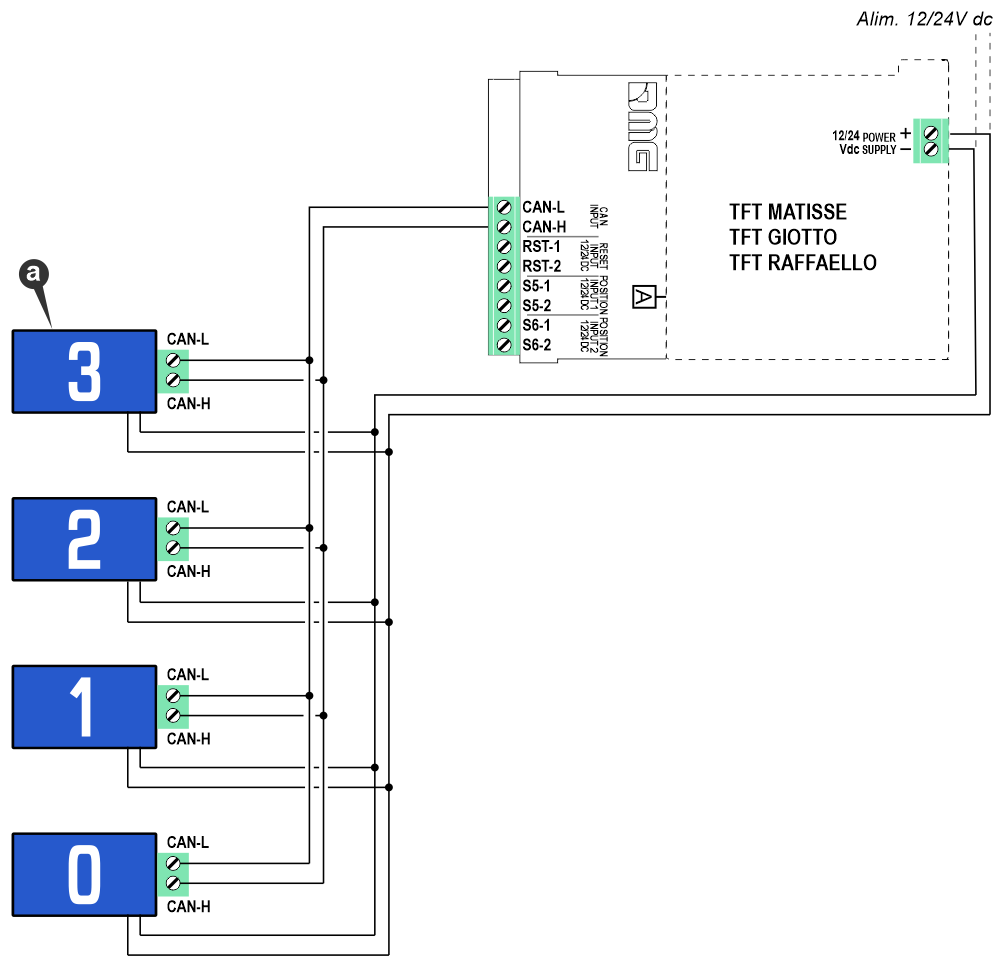
a) – Lattian sijainnin ilmaisimet (vain CAN-liitäntä)
Asetukset
Palauta asetukset
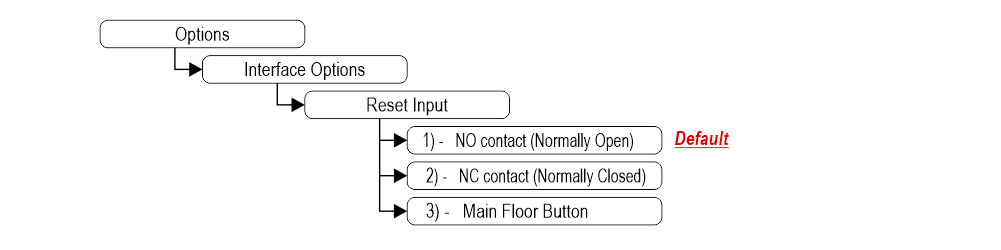
1) – Normaalisti avoin kosketin (katso”Johdotukset > Nollaus magneettisella anturilla”)
2) – Normaalisti suljettu kosketin (katso”Johdotukset > Nollaus magneettisella anturilla”)
3) – Pääkerroksen painike (katso”Johdotukset > Nollaus pääkerroksen painikkeen valolla”)
Ovialueen tyypin asetus
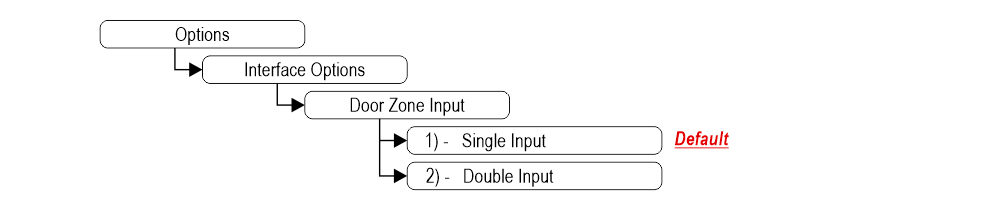
1) – Yksi tulo (katso”Johdotukset > Liitäntä yhden ovialueen signaalilla”)
2) – Kaksinkertainen tulo (katso”Johdotukset > Kaksinkertaisen ovisignaalin liitäntä”)
Nuolen nopeuden kynnysarvon asetus
Tuoteseloste
| Virtalähde | 12/24 V DC |
| Hallittavien pysähdysten määrä | -9 / 99 |
| Järjestelmän enimmäisnopeus | Jopa 2 m/s, 15 cm:n magneetti kerrosten laskemiseen 2 m/s – 4 m/s, 30 cm:n magneetti kerrosten laskemiseen |
| Virtalähteen asento/nollaustulo | 12/24 V DC Optoeristetty |
| Sarjaliitäntä laskeutumisasennon ilmaisimille | CAN BUS 10 kbps DMG-protokolla |
| Käyttölämpötila | -10 °C – +50 °C |
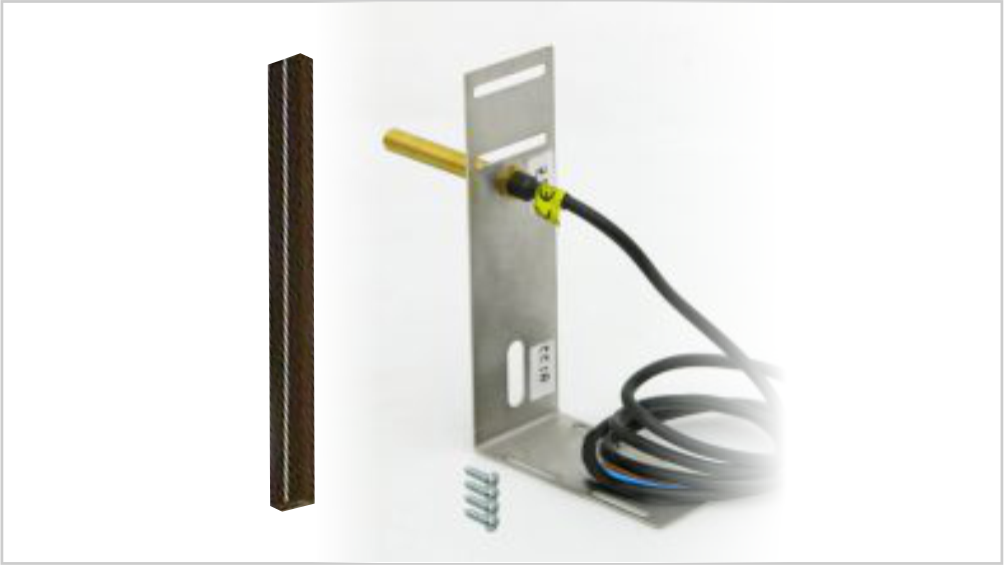
Lisävarusteet

1 magneettinen anturisarja

8 magneettia laskentasarjaan (15 cm)

4 magneettia laskentasarjaan (30 cm)
24 V:n virtalähde
Download
| Viite | Versio | Linkki |
|---|---|---|
| 1.9 | Download (englanti) | |
| Nollaus magneettisella anturilla (versio) | 2.0 | Download (englanti) |
| Järjestelmän enimmäisnopeus (tarkistus) | 2.1 | Download (englanti) |
| Yhteys yhden oven vyöhykesignaalin kanssa | 2.2 (nykyinen versio) | Download (englanti) |