
Процедура обучения полов
Если контроллер оснащен датчиком абсолютного отсчета, датчиком DMG или датчиком двигателя, можно воспользоваться функцией обучения положению на полу, которая позволяет ускорить конфигурацию и точную настройку системы. Процедура отличается в зависимости от типа энкодера, как описано в следующих разделах:
ELGO LIMAX 33CP: процедура обучения
Процедура обучения вручную
Если в установке недостаточно свободного пространства (уменьшенная головка), рекомендуется выполнять ручное обучение снаружи шахты лифта (по крайней мере, первые 3 ступени): В этом случае можно использовать Inspection BOX внутри контроллера и после Top of ar Inspection BOX.
 Процедура должна быть выполнена перед переводом системы в нормальный режим.
Процедура должна быть выполнена перед переводом системы в нормальный режим.
Для начала процедуры подъемник должен находиться во временном режиме работы. До окончания процедуры ручного обучения контакты безопасности подключены к цепи безопасности, но еще не работают (конечный выключатель, контрольный выключатель, OSG, eSGC), так как ELGO не знает реального положения конечных точек шахты. Единственное управление, основанное на устройстве ELGO - это обучение скорости (0,4 м/с), поэтому если скорость кабины выше 0,4 м/с, ELGO размыкает контакт OC (и замыкает контакт OC после остановки кабины).
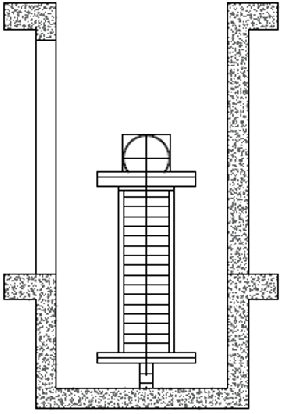 1) - Установите лифт вагон в верхнем положении (противовес на буферах).
1) - Установите лифт вагон в верхнем положении (противовес на буферах).
2) - Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционного блока 3 раза, чтобы перевести устройство ELGO в режим обучения. На игровой панели отображается мигающее сообщение WAIT (в случае возникновения проблемы процедура завершается с ошибкой ELGO, см. раздел Поиск и устранение неисправностей).
Устройство ELGO включит индикатор MODE и начнет подавать звуковой сигнал (один звуковой сигнал каждые 2 секунды). Этот звуковой сигнал будет присутствовать на протяжении всей процедуры ручного обучения. На игровой панели отображается мигающее сообщение "TOP".
 3) – Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционного блока 3 раза, чтобы записать в ELGO самую высокую точку вала. Эта точка будет точкой отсчета для верхних пределов (верхний концевой выключатель, верхний предел контроля, контроль TOP ETSL и т.д.)..
3) – Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционного блока 3 раза, чтобы записать в ELGO самую высокую точку вала. Эта точка будет точкой отсчета для верхних пределов (верхний концевой выключатель, верхний предел контроля, контроль TOP ETSL и т.д.)..
Сайт Устройство ELGO подает длинный звуковой сигнал, подтверждающий регистрацию данных верхнего предела.
На плейпаде отображается мигающее сообщение "Floor n" (n - этаж, который вы собираетесь записать).
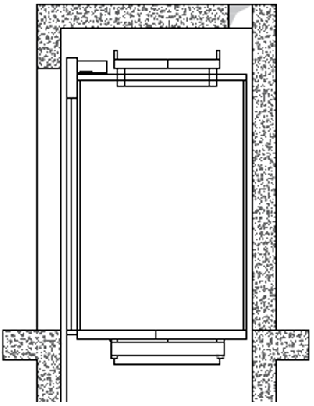
4) – Переместите кабину на самый верхний этаж.
Нажмите одновременно кнопки UP и DOWN инспекционной коробки 3 раза, чтобы записать в ELGO положение пола.
Сайт Устройство ELGO подает короткий звуковой сигнал, подтверждающий запись данных о перекрытии.
На плейпаде появляется мигающее сообщение "Floor n-1" (n-1 - это следующий этаж, который вы собираетесь записать).
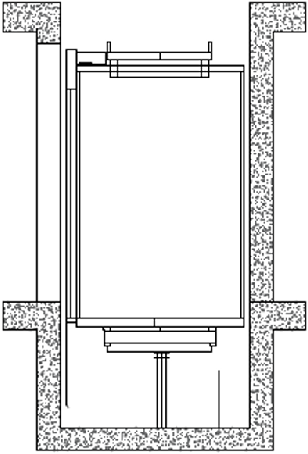 5) – Переместите кабину вниз до следующего этажа.
5) – Переместите кабину вниз до следующего этажа.
Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционной коробки 3 раза, чтобы записать в ELGO положение пола.
Устройство ELGO подает короткий звуковой сигнал, подтверждающий запись данных о перекрытии.
6) – Повторяйте предыдущий пункт, пока не будет достигнут самый низкий этаж.
7) – После записи сайт Положение нижнего этажа на плейпаде появляется мигающее сообщение "BOTTOM"., переместите кабину в самую нижнюю точку вала (кабина на буферах).
Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционной коробки 3 раза, чтобы записать внутри ELGO самое низкое положение. Эта точка является началом магнитной полосы (показано 0 мм) и будет точкой отсчета для нижних пределов (нижний концевой выключатель, нижний предел контроля, нижний контроль ETSL и т.д.)..
Устройство ELGO выдает длинный звуковой сигнал для подтверждения записи данных.
В этот момент контроллер автоматически производит запись:
- Положение приобретенных этажей;
- Положение зоны двери, используется контроллером для включения обхода контактов двери (предварительное открытие / повторное выравнивание).
- Расстояние замедления, в соответствии со скоростью лифта.
 На игровой панели отображается мигающее сообщение "/\": Переместите лифт вверх в положение нижнего этажа. Контроллер переведет ELGO в нормальный режим. (раньше это было невозможно, так как ELGO находился на пределе открытия OC и блокировки кабины).
На игровой панели отображается мигающее сообщение "/\": Переместите лифт вверх в положение нижнего этажа. Контроллер переведет ELGO в нормальный режим. (раньше это было невозможно, так как ELGO находился на пределе открытия OC и блокировки кабины).
На плейпаде появится мигающая надпись "WAIT" на 10 секунд, подождите, пока не появится надпись Floor 0.
Устройство ELGO прекращает подавать звуковой сигнал, а индикатор MODE начинает мигать (1 мигание в секунду).
Теперь устройство ELGO работает для контактов безопасности:
- Электронные устройства безопасности (при наличии)
- Электронные OSG.
- Окончательные концевые выключатели.
- Контрольные концевые выключатели еще не управляются, так как лифт находится во временном режиме..
Перед переходом в нормальный режим работы необходимо выполнить автоматическое обучение вала, чтобы установить правильные расстояния остановки в направлении вверх и вниз для каждого этажа.
Процедура автоматического обучения
9) - Лифт должен находиться во временной эксплуатации. Установите лифт на нижнем этаже с половиной максимальной нагрузки.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Поверните селектор инспекции в положение Normal
Лифт начинает двигаться автоматически:
- Движение вверх с замедлением и остановкой на каждом этаже.
- Спуск вниз с замедлением и остановкой на каждом этаже.
Когда кабина возвращается на самый нижний этаж, система готова к переходу в нормальный режим работы.
After automatic learning procedure in <Positioning>, Мониторный кодер вы можете установить:
- Расстояния замедления в нормальном режиме работы для конфорта замедления
- R1S (стр. 3) расстояние замедления вверх
- R1D (стр. 2) расстояние замедления вниз
Эти значения устанавливаются автоматически после автоматического обучения в соответствии со скоростью лифта (см. скорость подъема и расстояние замедления).
- Остановочные расстояния при проверке вала
- I_LIM_S расстояние до упора вверх до положения верхнего этажа
- I_LIM_D расстояние остановки вниз до нижнего положения пола
В системе Reduced Head/Pit эти значения должны быть учтены в соответствии с системой безопасности Pre-Triggered.
- Остановочные расстояния при нормальном обслуживании
- N_LIM_S расстояние до упора вверх после положения верхнего этажа
- N_LIM_D расстояние до упора вниз после нижнего положения пола
Эти значения устанавливаются автоматически после автоматического обучения на расстоянии, равном 30 мм от крайних этажей (в случае меньшего расстояния от опорных точек считается средняя точка между крайним этажом и крайними опорными позициями).
- Предварительное положение триггера ELGO+eSGC
- TRIPS расстояние от верха Исходное положение, в котором электрическая команда eSGC заставляет кабину остановиться (только для Уменьшенного подъема головы).
- TRIPD расстояние от дна Исходное положение, в котором электрическая команда eSGC заставляет кабину остановиться (только для установки в уменьшенной яме)
Эти значения являются значениями только для чтения и больше 0 мм только в том случае, если ELGO является частью системы Safety pre.-Triggered (вместе с электрическим предохранительным редуктором / регулятором превышения скорости).
Если в установке недостаточно свободного пространства (уменьшенная головка), рекомендуется выполнять ручное обучение снаружи шахты лифта (по крайней мере, первые 3 ступени): В этом случае можно использовать Inspection BOX внутри контроллера и после Top of ar Inspection BOX.
Для начала процедуры подъемник должен находиться во временном режиме работы. До окончания процедуры ручного обучения контакты безопасности подключены к цепи безопасности, но еще не работают (конечный выключатель, контрольный выключатель, OSG, eSGC), так как ELGO не знает реального положения конечных точек шахты. Единственное управление, основанное на устройстве ELGO - это обучение скорости (0,4 м/с), поэтому если скорость кабины выше 0,4 м/с, ELGO размыкает контакт OC (и замыкает контакт OC после остановки кабины).
1) - Установите лифт вагон в верхнем положении (противовес на буферах).2) - Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционного блока 3 раза, чтобы перевести устройство ELGO в режим обучения. На игровой панели отображается мигающее сообщение WAIT (в случае возникновения проблемы процедура завершается с ошибкой ELGO, см. раздел Поиск и устранение неисправностей).
Устройство ELGO включит индикатор MODE и начнет подавать звуковой сигнал (один звуковой сигнал каждые 2 секунды). Этот звуковой сигнал будет присутствовать на протяжении всей процедуры ручного обучения. На игровой панели отображается мигающее сообщение "TOP".
3) – Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционного блока 3 раза, чтобы записать в ELGO самую высокую точку вала. Эта точка будет точкой отсчета для верхних пределов (верхний концевой выключатель, верхний предел контроля, контроль TOP ETSL и т.д.)..Сайт Устройство ELGO подает длинный звуковой сигнал, подтверждающий регистрацию данных верхнего предела.
На плейпаде отображается мигающее сообщение "Floor n" (n - этаж, который вы собираетесь записать).
4) – Переместите кабину на самый верхний этаж.
Нажмите одновременно кнопки UP и DOWN инспекционной коробки 3 раза, чтобы записать в ELGO положение пола.
Сайт Устройство ELGO подает короткий звуковой сигнал, подтверждающий запись данных о перекрытии.
На плейпаде появляется мигающее сообщение "Floor n-1" (n-1 - это следующий этаж, который вы собираетесь записать).
5) – Переместите кабину вниз до следующего этажа.Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционной коробки 3 раза, чтобы записать в ELGO положение пола.
Устройство ELGO подает короткий звуковой сигнал, подтверждающий запись данных о перекрытии.
6) – Повторяйте предыдущий пункт, пока не будет достигнут самый низкий этаж.
7) – После записи сайт Положение нижнего этажа на плейпаде появляется мигающее сообщение "BOTTOM"., переместите кабину в самую нижнюю точку вала (кабина на буферах).
Нажмите одновременно кнопки ВВЕРХ и ВНИЗ инспекционной коробки 3 раза, чтобы записать внутри ELGO самое низкое положение. Эта точка является началом магнитной полосы (показано 0 мм) и будет точкой отсчета для нижних пределов (нижний концевой выключатель, нижний предел контроля, нижний контроль ETSL и т.д.)..
Устройство ELGO выдает длинный звуковой сигнал для подтверждения записи данных.
В этот момент контроллер автоматически производит запись:
- Положение приобретенных этажей;
- Положение зоны двери, используется контроллером для включения обхода контактов двери (предварительное открытие / повторное выравнивание).
- Расстояние замедления, в соответствии со скоростью лифта.
На игровой панели отображается мигающее сообщение "/\": Переместите лифт вверх в положение нижнего этажа. Контроллер переведет ELGO в нормальный режим. (раньше это было невозможно, так как ELGO находился на пределе открытия OC и блокировки кабины).На плейпаде появится мигающая надпись "WAIT" на 10 секунд, подождите, пока не появится надпись Floor 0.
Устройство ELGO прекращает подавать звуковой сигнал, а индикатор MODE начинает мигать (1 мигание в секунду).
Теперь устройство ELGO работает для контактов безопасности:
- Электронные устройства безопасности (при наличии)
- Электронные OSG.
- Окончательные концевые выключатели.
- Контрольные концевые выключатели еще не управляются, так как лифт находится во временном режиме..
Перед переходом в нормальный режим работы необходимо выполнить автоматическое обучение вала, чтобы установить правильные расстояния остановки в направлении вверх и вниз для каждого этажа.
Процедура автоматического обучения
9) - Лифт должен находиться во временной эксплуатации. Установите лифт на нижнем этаже с половиной максимальной нагрузки.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Поверните селектор инспекции в положение Normal
Лифт начинает двигаться автоматически:
- Движение вверх с замедлением и остановкой на каждом этаже.
- Спуск вниз с замедлением и остановкой на каждом этаже.
Когда кабина возвращается на самый нижний этаж, система готова к переходу в нормальный режим работы.
After automatic learning procedure in <Positioning>, Мониторный кодер вы можете установить:
- Расстояния замедления в нормальном режиме работы для конфорта замедления
- R1S (стр. 3) расстояние замедления вверх
- R1D (стр. 2) расстояние замедления вниз
Эти значения устанавливаются автоматически после автоматического обучения в соответствии со скоростью лифта (см. скорость подъема и расстояние замедления).
- Остановочные расстояния при проверке вала
- I_LIM_S расстояние до упора вверх до положения верхнего этажа
- I_LIM_D расстояние остановки вниз до нижнего положения пола
В системе Reduced Head/Pit эти значения должны быть учтены в соответствии с системой безопасности Pre-Triggered.
- Остановочные расстояния при нормальном обслуживании
- N_LIM_S расстояние до упора вверх после положения верхнего этажа
- N_LIM_D расстояние до упора вниз после нижнего положения пола
Эти значения устанавливаются автоматически после автоматического обучения на расстоянии, равном 30 мм от крайних этажей (в случае меньшего расстояния от опорных точек считается средняя точка между крайним этажом и крайними опорными позициями).
- Предварительное положение триггера ELGO+eSGC
- TRIPS расстояние от верха Исходное положение, в котором электрическая команда eSGC заставляет кабину остановиться (только для Уменьшенного подъема головы).
- TRIPD расстояние от дна Исходное положение, в котором электрическая команда eSGC заставляет кабину остановиться (только для установки в уменьшенной яме)
Эти значения являются значениями только для чтения и больше 0 мм только в том случае, если ELGO является частью системы Safety pre.-Triggered (вместе с электрическим предохранительным редуктором / регулятором превышения скорости).
DMG энкодер или энкодер двигателя: Процедура автоматического обучения полов
После установки и в режиме ВРЕМЕННОЙ РАБОТЫ контроллер выполняет ряд пробных запусков вверх/вниз (сначала на высокой скорости, затем на низкой скорости с остановками на этажах) с целью изучения точного расположения пола.
Процедура самообучения:
1) – Убедитесь, что установка находится в режиме "Временная работа".
2) – Убедитесь, что энкодер отслеживает правильное направление движения (увеличивается расстояние при движении вверх, уменьшается при движении вниз); при необходимости в меню "Позиционирование" установите параметр Система позиционирования с по часовой стрелке на против часовой стрелки (или наоборот) и сохраните новую настройку.

3) – Проверьте правильность показаний входа ZP (дверная зона) (светодиод ZP на модуле PLAYPAD должен гореть, когда он находится в дверной зоне).
4) – Проверьте правильность показаний входов AGB/AGH (концевые выключатели замедления) (AGB/AGH должны быть разомкнуты, когда находятся в крайних положениях замедления).
5) – Убедитесь, что кабина находится на нижнем этаже (AGB открыт, светодиод ZP горит)
6) – Войдите в меню "Позиционирование", выберите параметр Автонастройка и введите:
- На энкодере DMG: разрешение энкодера (64 или 100 импульсов в зависимости от модели энкодера), затем длина напольных магнитов. (Длина дверной зоны). Подтвердите общее количество этажей, затем нажмите "Yes" для начала процедуры.
- На энкодере двигателя: разрешение энкодера, коэффициент двигателя, тяговый шкив и канат. Подтвердите общее количество этажей, затем нажмите "Да", чтобы начать процедуру.
7) – Установите селектор смотровой панели на NORMAL (если есть), в противном случае убедитесь, что цепь безопасности замкнута.
Система выполняет следующую автоматическую процедуру:
- Движение вверх, пока не отключится сигнал ZP нижнего этажа
- Движение вниз, пока не активируется сигнал ZP нижнего этажа
- Движение вверх с высокой скоростью и определение положения для каждого этажа (нижний край магнитов дверной зоны); точное положение нижнего края магнита сохраняется в памяти контроллера.
- При достижении верхней точки замедления (AGH) система переключается на низкую скорость, а при достижении зоны дверей верхнего этажа (ZP) останавливается.
- Движение вниз с высокой скоростью и определение положения для каждого этажа (верхний край магнитов дверной зоны); точное положение верхнего края магнита сохраняется в памяти контроллера.
- При достижении нижней точки замедления (AGB) система переключается на низкую скорость, а при достижении зоны дверей нижнего этажа (ZP) останавливается.
- Движение вверх, замедление и остановка на каждом этаже (на уровне магнита ZP)
- Движение вниз замедляется и останавливается на каждом этаже (на уровне магнита ZP)
После второго набора прогонов (который заканчивается на самом нижнем этаже) установка готова к переходу в режим SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
ПРИМЕЧАНИЕ: процедура самообучения должна выполняться каждый раз, когда концевые выключатели AGB/AGH и/или магниты дверных зон перемещаются из исходного положения.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH расстояния достаточно для скорости подъема. Можно ли увеличить/уменьшить расстояние замедления в нормальном режиме работы R1S и R1D без повторения процедуры автоматического обучения.
Для определения положения AGB/AGH и расстояния замедления используйте таблица в соответствии со скоростью лифта.
В системах, где минимально необходимые размеры в верхней и нижней части шахты гарантированы в соответствии с требованиями правила EN 81, можно использовать два параметра для остановки лифта в инспекции.
In <Positioning>, Мониторный кодер
- I_LIM_S расстояние до упора вверх до положения верхнего этажа
- I_LIM_D расстояние остановки вниз до нижнего положения пола
Эти расстояния остановки действительны для осмотра из шахты (не действуют в случае осмотра из машинного отделения) и могут быть использованы для предотвращения риска застревания техника в шахте лифта.
Имейте в виду, что эти стопорные позиции не являются предохранительными контактами.
Процедура самообучения:
1) – Убедитесь, что установка находится в режиме "Временная работа".
2) – Убедитесь, что энкодер отслеживает правильное направление движения (увеличивается расстояние при движении вверх, уменьшается при движении вниз); при необходимости в меню "Позиционирование" установите параметр Система позиционирования с по часовой стрелке на против часовой стрелки (или наоборот) и сохраните новую настройку.
3) – Проверьте правильность показаний входа ZP (дверная зона) (светодиод ZP на модуле PLAYPAD должен гореть, когда он находится в дверной зоне).
4) – Проверьте правильность показаний входов AGB/AGH (концевые выключатели замедления) (AGB/AGH должны быть разомкнуты, когда находятся в крайних положениях замедления).
5) – Убедитесь, что кабина находится на нижнем этаже (AGB открыт, светодиод ZP горит)
6) – Войдите в меню "Позиционирование", выберите параметр Автонастройка и введите:
- На энкодере DMG: разрешение энкодера (64 или 100 импульсов в зависимости от модели энкодера), затем длина напольных магнитов. (Длина дверной зоны). Подтвердите общее количество этажей, затем нажмите "Yes" для начала процедуры.
- На энкодере двигателя: разрешение энкодера, коэффициент двигателя, тяговый шкив и канат. Подтвердите общее количество этажей, затем нажмите "Да", чтобы начать процедуру.
7) – Установите селектор смотровой панели на NORMAL (если есть), в противном случае убедитесь, что цепь безопасности замкнута.
Система выполняет следующую автоматическую процедуру:
- Движение вверх, пока не отключится сигнал ZP нижнего этажа
- Движение вниз, пока не активируется сигнал ZP нижнего этажа
- Движение вверх с высокой скоростью и определение положения для каждого этажа (нижний край магнитов дверной зоны); точное положение нижнего края магнита сохраняется в памяти контроллера.
- При достижении верхней точки замедления (AGH) система переключается на низкую скорость, а при достижении зоны дверей верхнего этажа (ZP) останавливается.
- Движение вниз с высокой скоростью и определение положения для каждого этажа (верхний край магнитов дверной зоны); точное положение верхнего края магнита сохраняется в памяти контроллера.
- При достижении нижней точки замедления (AGB) система переключается на низкую скорость, а при достижении зоны дверей нижнего этажа (ZP) останавливается.
- Движение вверх, замедление и остановка на каждом этаже (на уровне магнита ZP)
- Движение вниз замедляется и останавливается на каждом этаже (на уровне магнита ZP)
После второго набора прогонов (который заканчивается на самом нижнем этаже) установка готова к переходу в режим SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
ПРИМЕЧАНИЕ: процедура самообучения должна выполняться каждый раз, когда концевые выключатели AGB/AGH и/или магниты дверных зон перемещаются из исходного положения.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH расстояния достаточно для скорости подъема. Можно ли увеличить/уменьшить расстояние замедления в нормальном режиме работы R1S и R1D без повторения процедуры автоматического обучения.
Для определения положения AGB/AGH и расстояния замедления используйте таблица в соответствии со скоростью лифта.
В системах, где минимально необходимые размеры в верхней и нижней части шахты гарантированы в соответствии с требованиями правила EN 81, можно использовать два параметра для остановки лифта в инспекции.
In <Positioning>, Мониторный кодер
- I_LIM_S расстояние до упора вверх до положения верхнего этажа
- I_LIM_D расстояние остановки вниз до нижнего положения пола
Эти расстояния остановки действительны для осмотра из шахты (не действуют в случае осмотра из машинного отделения) и могут быть использованы для предотвращения риска застревания техника в шахте лифта.
Имейте в виду, что эти стопорные позиции не являются предохранительными контактами.
Видеоурок
Как настроить систему позиционирования ELGO с контроллером Pitagora 4.0






