
Procedimiento de aprendizaje de pisos
Si el Controlador está equipado con un Encoder Absoluto o un Encoder DMG o un Encoder de Motor, es posible aprovechar la función de aprendizaje de posición en el suelo, que permite una configuración más rápida del sistema y un ajuste fino. El procedimiento es diferente según el tipo de encoder, como se describe en las siguientes secciones:
ELGO LIMAX 33CP: Procedimiento de aprendizaje
Procedimiento de aprendizaje manual
Si en la instalación no hay suficiente espacio libre (Cabezal Reducido) se recomienda hacer la Enseñanza Manual desde fuera del hueco del ascensor (al menos los 3 primeros pasos): En este caso se puede utilizar la Caja de Inspección dentro del controlador y después de la Caja de Inspección superior.
 El procedimiento debe realizarse antes de poner el sistema en modo Normal.
El procedimiento debe realizarse antes de poner el sistema en modo Normal.
Para iniciar el procedimiento, el ascensor debe estar en funcionamiento temporal. Hasta el final del procedimiento de aprendizaje manual, los contactos de seguridad están conectados en la cadena de seguridad pero aún no están operativos (interruptor de límite final, interruptor de límite de inspección, OSG, eSGC) porque el ELGO no conoce la posición real de los puntos de límite del eje. El único control basado en el dispositivo ELGO es el de Enseñar sobre la velocidad (0,4 m/s), por lo que si la velocidad de la cabina es superior a 0,4 m/s, el ELGO abre el contacto OC (y cierra el contacto OC después de que la cabina esté parada).
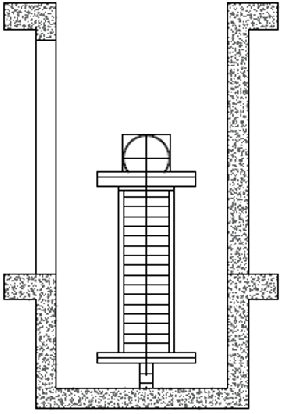 1) - Poner el ascensor coche en la posición más alta (contrapeso en los topes).
1) - Poner el ascensor coche en la posición más alta (contrapeso en los topes).
2) - Pulse simultáneamente el botón UP y DOWN de la Caja de Inspección 3 veces para poner el dispositivo ELGO en Modo Teach. En el playpad aparece un mensaje parpadeante de WAIT (en caso de problema el procedimiento se cierra con un Fault ELGO, ver Solución de problemas).
El dispositivo ELGO enciende el led MODE y comienza a emitir una señal acústica (un pitido cada 2 segundos). Esta señal acústica estará presente durante todo el procedimiento de aprendizaje manual. En el playpad aparece un mensaje "TOP" parpadeando.
 3) – Vuelva a pulsar simultáneamente el botón ARRIBA y ABAJO de la Caja de Inspección 3 veces para registrar dentro del ELGO el punto más alto del Eje. Este punto será el punto de referencia para los límites superiores (interruptor de límite superior, límite de inspección superior, control de ETSL superior, etc.).
3) – Vuelva a pulsar simultáneamente el botón ARRIBA y ABAJO de la Caja de Inspección 3 veces para registrar dentro del ELGO el punto más alto del Eje. Este punto será el punto de referencia para los límites superiores (interruptor de límite superior, límite de inspección superior, control de ETSL superior, etc.).
El El dispositivo ELGO emite una respuesta acústica larga para confirmar que se han registrado los datos del límite superior.
En el panel de reproducción aparece el mensaje "Piso n" parpadeando (n es el piso que vas a grabar).
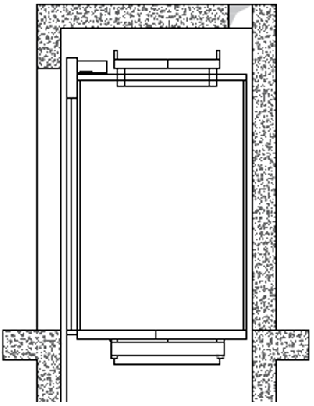
4) – Sube la cabina al piso más alto.
Pulse simultáneamente los botones ARRIBA y ABAJO de la Caja de Inspección 3 veces para grabar dentro del ELGO la posición del suelo.
El El dispositivo ELGO emite una breve respuesta acústica para confirmar que se han registrado los datos del suelo.
En el panel de reproducción aparece el mensaje "Piso n-1" parpadeando (n-1 es el siguiente piso que vas a grabar).
 5) – Mueve la cabina hacia abajo hasta el siguiente piso.
5) – Mueve la cabina hacia abajo hasta el siguiente piso.
Pulse simultáneamente el botón ARRIBA y ABAJO de la Caja de Inspección 3 veces para grabar dentro del ELGO la posición del suelo.
El dispositivo ELGO emite una breve respuesta acústica para confirmar que se han registrado los datos del suelo.
6) – Repita el punto anterior hasta llegar al piso más bajo.
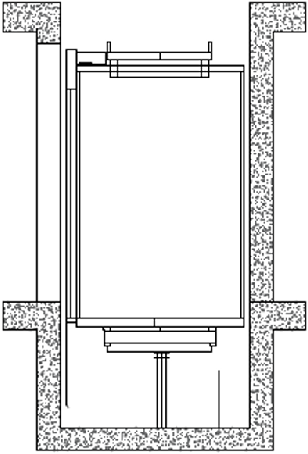
7) – Tras la grabación de el Posición del piso inferior en el panel de control muestra un mensaje intermitente "BOTTOM"., mueva la cabina hasta el punto más bajo del eje (cabina en los topes).
Pulse simultáneamente el botón UP y DOWN de la Caja de Inspección 3 veces para registrar dentro del ELGO la posición más baja. Este punto es el origen de la banda magnética (0 mm mostrado) y será el punto de referencia para los límites de fondo (interruptor de límite de fondo, límite de inspección de fondo, control de ETSL de fondo, etc.).
El dispositivo ELGO emite una respuesta acústica prolongada para confirmar el registro de los datos.
En este momento el controlador graba automáticamente:
- Posición de los pisos adquiridos;
- Posición de la zona de la puerta, utilizada por el controlador para habilitar la derivación de los contactos de la puerta (preapertura / renivelación).
- Distancia de desaceleración, según la velocidad del ascensor.
 En el tablero de juego aparece un mensaje "/\" parpadeante: Mueva el ascensor hasta la posición del piso inferior. El controlador pondrá el ELGO en Modo Normal. (antes no era posible porque el ELGO estaría en los límites abriendo OC y bloqueando la cabina).
En el tablero de juego aparece un mensaje "/\" parpadeante: Mueva el ascensor hasta la posición del piso inferior. El controlador pondrá el ELGO en Modo Normal. (antes no era posible porque el ELGO estaría en los límites abriendo OC y bloqueando la cabina).
En el playpad se muestra un mensaje "WAIT" parpadeando durante 10 segundos, espere hasta que se muestre Floor 0.
El dispositivo ELGO deja de emitir el pitido acústico y el led MODE comienza a parpadear (1 parpadeo por segundo).
Ahora el dispositivo ELGO está operativo para los contactos de seguridad:
- Equipo de seguridad electrónico (si está presente)
- OSG electrónico.
- Interruptores de fin de carrera.
- Los interruptores de fin de carrera de inspección aún no se gestionan porque el ascensor está en modo temporal..
Antes del modo de funcionamiento normal, es obligatorio ejecutar un aprendizaje automático del eje para establecer las distancias de parada correctas en dirección ascendente y descendente para cada piso.
Procedimiento de aprendizaje automático
9) - El ascensor debe estar en funcionamiento temporal. Ponga el ascensor en el piso inferior con la mitad de la carga máxima.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Gire el selector de inspección a la posición normal
El ascensor se pone en marcha automáticamente:
- Viajes hacia arriba con desaceleración y parada en cada piso.
- Viajes hacia abajo con desaceleración y paradas en cada piso.
Cuando la cabina vuelve al piso más bajo, el sistema está listo para pasar al servicio normal.
After automatic learning procedure in <Positioning>, Monitorear el codificador que puedas establecer:
- Distancias de deceleración en servicio normal para el confort de deceleración
- R1S (Pag. 3) distancia de deceleración hacia arriba
- R1D (Pag. 2) distancia de deceleración hacia abajo
Estos valores se ajustan automáticamente tras el aprendizaje automático según la velocidad del ascensor (ver velocidad de elevación y distancia de deceleración).
- Distancias de parada en la inspección del eje
- I_LIM_S distancia de parada hacia arriba antes de la posición del piso superior
- I_LIM_D distancia de parada hacia abajo antes de la posición del piso inferior
En el caso de la Cabeza Reducida / Foso, estos valores deben ser considerados de acuerdo con el sistema de seguridad pre-disparado.
- Distancias de parada en servicio normal
- N_LIM_S distancia de parada hacia arriba después de la posición del piso superior
- N_LIM_D distancia de parada hacia abajo después de la posición del piso inferior
Estos valores se fijan automáticamente tras el aprendizaje automático a una distancia igual a 30 mm de los pisos extremos (en caso de menor distancia de los puntos de referencia se considera el punto medio entre el piso extremo y las posiciones de referencia extremas).
- Posición de pre-disparo de ELGO+eSGC
- TRIPS distancia desde la parte superior Posición de referencia en la que el comando eléctrico eSGC obliga a la cabina a detenerse (sólo para la elevación de cabeza reducida).
- Distancia TRIPD desde el fondo Posición de referencia en la que el comando eléctrico eSGC obliga a la cabina a detenerse (sólo para instalación de Foso Reducido)
Estos valores son de sólo lectura y son mayores que 0 mm sólo si el ELGO forma parte del sistema de previsión de seguridad (junto con el paracaídas eléctrico / regulador de velocidad).
Si en la instalación no hay suficiente espacio libre (Cabezal Reducido) se recomienda hacer la Enseñanza Manual desde fuera del hueco del ascensor (al menos los 3 primeros pasos): En este caso se puede utilizar la Caja de Inspección dentro del controlador y después de la Caja de Inspección superior.
Para iniciar el procedimiento, el ascensor debe estar en funcionamiento temporal. Hasta el final del procedimiento de aprendizaje manual, los contactos de seguridad están conectados en la cadena de seguridad pero aún no están operativos (interruptor de límite final, interruptor de límite de inspección, OSG, eSGC) porque el ELGO no conoce la posición real de los puntos de límite del eje. El único control basado en el dispositivo ELGO es el de Enseñar sobre la velocidad (0,4 m/s), por lo que si la velocidad de la cabina es superior a 0,4 m/s, el ELGO abre el contacto OC (y cierra el contacto OC después de que la cabina esté parada).
1) - Poner el ascensor coche en la posición más alta (contrapeso en los topes).2) - Pulse simultáneamente el botón UP y DOWN de la Caja de Inspección 3 veces para poner el dispositivo ELGO en Modo Teach. En el playpad aparece un mensaje parpadeante de WAIT (en caso de problema el procedimiento se cierra con un Fault ELGO, ver Solución de problemas).
El dispositivo ELGO enciende el led MODE y comienza a emitir una señal acústica (un pitido cada 2 segundos). Esta señal acústica estará presente durante todo el procedimiento de aprendizaje manual. En el playpad aparece un mensaje "TOP" parpadeando.
3) – Vuelva a pulsar simultáneamente el botón ARRIBA y ABAJO de la Caja de Inspección 3 veces para registrar dentro del ELGO el punto más alto del Eje. Este punto será el punto de referencia para los límites superiores (interruptor de límite superior, límite de inspección superior, control de ETSL superior, etc.).El El dispositivo ELGO emite una respuesta acústica larga para confirmar que se han registrado los datos del límite superior.
En el panel de reproducción aparece el mensaje "Piso n" parpadeando (n es el piso que vas a grabar).
4) – Sube la cabina al piso más alto.
Pulse simultáneamente los botones ARRIBA y ABAJO de la Caja de Inspección 3 veces para grabar dentro del ELGO la posición del suelo.
El El dispositivo ELGO emite una breve respuesta acústica para confirmar que se han registrado los datos del suelo.
En el panel de reproducción aparece el mensaje "Piso n-1" parpadeando (n-1 es el siguiente piso que vas a grabar).
5) – Mueve la cabina hacia abajo hasta el siguiente piso.Pulse simultáneamente el botón ARRIBA y ABAJO de la Caja de Inspección 3 veces para grabar dentro del ELGO la posición del suelo.
El dispositivo ELGO emite una breve respuesta acústica para confirmar que se han registrado los datos del suelo.
6) – Repita el punto anterior hasta llegar al piso más bajo.
7) – Tras la grabación de el Posición del piso inferior en el panel de control muestra un mensaje intermitente "BOTTOM"., mueva la cabina hasta el punto más bajo del eje (cabina en los topes).
Pulse simultáneamente el botón UP y DOWN de la Caja de Inspección 3 veces para registrar dentro del ELGO la posición más baja. Este punto es el origen de la banda magnética (0 mm mostrado) y será el punto de referencia para los límites de fondo (interruptor de límite de fondo, límite de inspección de fondo, control de ETSL de fondo, etc.).
El dispositivo ELGO emite una respuesta acústica prolongada para confirmar el registro de los datos.
En este momento el controlador graba automáticamente:
- Posición de los pisos adquiridos;
- Posición de la zona de la puerta, utilizada por el controlador para habilitar la derivación de los contactos de la puerta (preapertura / renivelación).
- Distancia de desaceleración, según la velocidad del ascensor.
En el tablero de juego aparece un mensaje "/\" parpadeante: Mueva el ascensor hasta la posición del piso inferior. El controlador pondrá el ELGO en Modo Normal. (antes no era posible porque el ELGO estaría en los límites abriendo OC y bloqueando la cabina).En el playpad se muestra un mensaje "WAIT" parpadeando durante 10 segundos, espere hasta que se muestre Floor 0.
El dispositivo ELGO deja de emitir el pitido acústico y el led MODE comienza a parpadear (1 parpadeo por segundo).
Ahora el dispositivo ELGO está operativo para los contactos de seguridad:
- Equipo de seguridad electrónico (si está presente)
- OSG electrónico.
- Interruptores de fin de carrera.
- Los interruptores de fin de carrera de inspección aún no se gestionan porque el ascensor está en modo temporal..
Antes del modo de funcionamiento normal, es obligatorio ejecutar un aprendizaje automático del eje para establecer las distancias de parada correctas en dirección ascendente y descendente para cada piso.
Procedimiento de aprendizaje automático
9) - El ascensor debe estar en funcionamiento temporal. Ponga el ascensor en el piso inferior con la mitad de la carga máxima.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Gire el selector de inspección a la posición normal
El ascensor se pone en marcha automáticamente:
- Viajes hacia arriba con desaceleración y parada en cada piso.
- Viajes hacia abajo con desaceleración y paradas en cada piso.
Cuando la cabina vuelve al piso más bajo, el sistema está listo para pasar al servicio normal.
After automatic learning procedure in <Positioning>, Monitorear el codificador que puedas establecer:
- Distancias de deceleración en servicio normal para el confort de deceleración
- R1S (Pag. 3) distancia de deceleración hacia arriba
- R1D (Pag. 2) distancia de deceleración hacia abajo
Estos valores se ajustan automáticamente tras el aprendizaje automático según la velocidad del ascensor (ver velocidad de elevación y distancia de deceleración).
- Distancias de parada en la inspección del eje
- I_LIM_S distancia de parada hacia arriba antes de la posición del piso superior
- I_LIM_D distancia de parada hacia abajo antes de la posición del piso inferior
En el caso de la Cabeza Reducida / Foso, estos valores deben ser considerados de acuerdo con el sistema de seguridad pre-disparado.
- Distancias de parada en servicio normal
- N_LIM_S distancia de parada hacia arriba después de la posición del piso superior
- N_LIM_D distancia de parada hacia abajo después de la posición del piso inferior
Estos valores se fijan automáticamente tras el aprendizaje automático a una distancia igual a 30 mm de los pisos extremos (en caso de menor distancia de los puntos de referencia se considera el punto medio entre el piso extremo y las posiciones de referencia extremas).
- Posición de pre-disparo de ELGO+eSGC
- TRIPS distancia desde la parte superior Posición de referencia en la que el comando eléctrico eSGC obliga a la cabina a detenerse (sólo para la elevación de cabeza reducida).
- Distancia TRIPD desde el fondo Posición de referencia en la que el comando eléctrico eSGC obliga a la cabina a detenerse (sólo para instalación de Foso Reducido)
Estos valores son de sólo lectura y son mayores que 0 mm sólo si el ELGO forma parte del sistema de previsión de seguridad (junto con el paracaídas eléctrico / regulador de velocidad).
Codificador DMG o codificador de motor: Procedimiento de aprendizaje automático de suelos
Después de la instalación y durante el modo de FUNCIONAMIENTO TEMPORAL, el controlador realiza una serie de recorridos de prueba de subida/bajada (primero a alta velocidad y luego a baja velocidad con paradas en los pisos) con el propósito de aprender el posicionamiento exacto del piso.
Procedimiento de autoaprendizaje:
1) – Asegúrese de que la instalación está en el modo de "funcionamiento temporal".
2) – Asegúrese de que el codificador traza el sentido correcto de la marcha, (aumentando la distancia cuando sube, disminuyendo la distancia cuando baja); si es necesario, en el menú "posicionamiento" ajuste el parámetro Sistema de posicionamiento de horario a antihorario (o viceversa) y guarde el nuevo ajuste.

3) – Compruebe la lectura correcta de la entrada ZP (zona de puerta) (el LED ZP del módulo PLAYPAD debe estar iluminado cuando está en la zona de puerta)
4) – Compruebe la lectura correcta de las entradas AGB/AGH (interruptores de límite de deceleración) (AGB/AGH deben estar abiertos cuando están en posiciones de límite de deceleración)
5) – Asegúrese de que la cabina está en el piso inferior (AGB abierto, ZP LED encendido)
6) – Entre en el menú "Posicionamiento", seleccione el parámetro de ajuste automático y entre:
- En el codificador DMG: la resolución del codificador (número de impulsos 64 o 100 según el modelo de codificador), luego la longitud de los imanes de suelo. (Longitud de la zona de la puerta). Confirme el número total de pisos y pulse "Sí" para iniciar el procedimiento.
- En el codificador del motor: la resolución del codificador, la relación del motor, la polea de tracción y la cuerda. Confirme el número total de piso, luego pulse "Sí" para iniciar el procedimiento.
7) – Coloque el selector del panel de inspección en NORMAL (si está presente), de lo contrario asegúrese de que la cadena de seguridad esté cerrada.
El sistema realiza el siguiente procedimiento automático:
- Subiendo, hasta desactivar la señal ZP del piso inferior
- Desplazamiento hacia abajo, hasta que se active la señal ZP del piso inferior
- Subida a gran velocidad y detección de posición para cada piso (borde inferior de los imanes de la zona de la puerta); la posición exacta del borde inferior del imán se almacena en la memoria del controlador.
- Al llegar al punto de desaceleración superior (AGH) el sistema pasa a velocidad baja y al llegar a la zona de la puerta del piso superior (ZP) se detiene.
- Desplazamiento hacia abajo a gran velocidad y detección de la posición de cada piso (borde superior de los imanes de la zona de la puerta); la posición exacta del borde superior del imán se almacena en la memoria del controlador.
- Al llegar al punto de desaceleración inferior (AGB) el sistema cambia a velocidad baja y al llegar a la zona de la puerta del piso inferior (ZP) se detiene.
- Subiendo, bajando y parando en cada piso (a nivel del imán ZP)
- Desplazamiento hacia abajo, ralentizando y parando en cada piso (a nivel del imán ZP)
Después de la segunda serie de recorridos (que termina en el piso más bajo), la instalación está lista para pasar al modo de SERVICIO.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTAEl procedimiento de autoaprendizaje debe realizarse cada vez que los interruptores de límite AGB/AGH y/o los imanes de la zona de la puerta se mueven de su posición original.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH distancias son suficientes para la velocidad de elevación. ¿Es posible aumentar/disminuir las distancias de desaceleración en el servicio normal R1S y R1D sin necesidad de repetir el procedimiento de aprendizaje automático?
Para las posiciones AGB/AGH y las distancias de desaceleración utilice tabla según la velocidad del ascensor.
En los sistemas en los que las dimensiones mínimas requeridas en la parte superior e inferior del hueco están garantizadas según los requisitos de la normativa EN 81, es posible utilizar dos parámetros para detener el ascensor en Inspección.
In <Positioning>, Monitorear el codificador
- I_LIM_S distancia de parada hacia arriba antes de la posición del piso superior
- I_LIM_D distancia de parada hacia abajo antes de la posición del piso inferior
Estas distancias de parada son válidas para la inspección desde el hueco (no están activas en el caso de la inspección desde la sala de máquinas) y pueden utilizarse para evitar el riesgo de que el técnico quede atrapado dentro del hueco del ascensor.
Tenga en cuenta que estas posiciones de parada no son contactos de seguridad.
Procedimiento de autoaprendizaje:
1) – Asegúrese de que la instalación está en el modo de "funcionamiento temporal".
2) – Asegúrese de que el codificador traza el sentido correcto de la marcha, (aumentando la distancia cuando sube, disminuyendo la distancia cuando baja); si es necesario, en el menú "posicionamiento" ajuste el parámetro Sistema de posicionamiento de horario a antihorario (o viceversa) y guarde el nuevo ajuste.
3) – Compruebe la lectura correcta de la entrada ZP (zona de puerta) (el LED ZP del módulo PLAYPAD debe estar iluminado cuando está en la zona de puerta)
4) – Compruebe la lectura correcta de las entradas AGB/AGH (interruptores de límite de deceleración) (AGB/AGH deben estar abiertos cuando están en posiciones de límite de deceleración)
5) – Asegúrese de que la cabina está en el piso inferior (AGB abierto, ZP LED encendido)
6) – Entre en el menú "Posicionamiento", seleccione el parámetro de ajuste automático y entre:
- En el codificador DMG: la resolución del codificador (número de impulsos 64 o 100 según el modelo de codificador), luego la longitud de los imanes de suelo. (Longitud de la zona de la puerta). Confirme el número total de pisos y pulse "Sí" para iniciar el procedimiento.
- En el codificador del motor: la resolución del codificador, la relación del motor, la polea de tracción y la cuerda. Confirme el número total de piso, luego pulse "Sí" para iniciar el procedimiento.
7) – Coloque el selector del panel de inspección en NORMAL (si está presente), de lo contrario asegúrese de que la cadena de seguridad esté cerrada.
El sistema realiza el siguiente procedimiento automático:
- Subiendo, hasta desactivar la señal ZP del piso inferior
- Desplazamiento hacia abajo, hasta que se active la señal ZP del piso inferior
- Subida a gran velocidad y detección de posición para cada piso (borde inferior de los imanes de la zona de la puerta); la posición exacta del borde inferior del imán se almacena en la memoria del controlador.
- Al llegar al punto de desaceleración superior (AGH) el sistema pasa a velocidad baja y al llegar a la zona de la puerta del piso superior (ZP) se detiene.
- Desplazamiento hacia abajo a gran velocidad y detección de la posición de cada piso (borde superior de los imanes de la zona de la puerta); la posición exacta del borde superior del imán se almacena en la memoria del controlador.
- Al llegar al punto de desaceleración inferior (AGB) el sistema cambia a velocidad baja y al llegar a la zona de la puerta del piso inferior (ZP) se detiene.
- Subiendo, bajando y parando en cada piso (a nivel del imán ZP)
- Desplazamiento hacia abajo, ralentizando y parando en cada piso (a nivel del imán ZP)
Después de la segunda serie de recorridos (que termina en el piso más bajo), la instalación está lista para pasar al modo de SERVICIO.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTAEl procedimiento de autoaprendizaje debe realizarse cada vez que los interruptores de límite AGB/AGH y/o los imanes de la zona de la puerta se mueven de su posición original.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH distancias son suficientes para la velocidad de elevación. ¿Es posible aumentar/disminuir las distancias de desaceleración en el servicio normal R1S y R1D sin necesidad de repetir el procedimiento de aprendizaje automático?
Para las posiciones AGB/AGH y las distancias de desaceleración utilice tabla según la velocidad del ascensor.
En los sistemas en los que las dimensiones mínimas requeridas en la parte superior e inferior del hueco están garantizadas según los requisitos de la normativa EN 81, es posible utilizar dos parámetros para detener el ascensor en Inspección.
In <Positioning>, Monitorear el codificador
- I_LIM_S distancia de parada hacia arriba antes de la posición del piso superior
- I_LIM_D distancia de parada hacia abajo antes de la posición del piso inferior
Estas distancias de parada son válidas para la inspección desde el hueco (no están activas en el caso de la inspección desde la sala de máquinas) y pueden utilizarse para evitar el riesgo de que el técnico quede atrapado dentro del hueco del ascensor.
Tenga en cuenta que estas posiciones de parada no son contactos de seguridad.
Video Tutorial
Cómo configurar el sistema de posicionamiento ELGO con un controlador Pitagora 4.0






