
Leerprocedure van vloeren
Als de regelaar is uitgerust met een absolute encoder of DMG-encoder of motorencoder, is het mogelijk om gebruik te maken van de leerfunctie voor verdiepingsposities, die een snellere systeemconfiguratie en fijnafstelling mogelijk maakt. De procedure verschilt naargelang het type encoder, zoals beschreven in de volgende hoofdstukken:
ELGO LIMAX 33CP: Leerprocedure
Handmatige leerprocedure
Als er bij de installatie niet voldoende vrije ruimte is (gereduceerde kop), wordt aanbevolen om de handmatige bediening van buiten de liftschacht uit te voeren (ten minste de eerste 3 stappen): In dit geval kunt u de Inspection BOX binnen de controller gebruiken en na de Top of ar Inspection BOX.
 De procedure moet worden uitgevoerd voordat het systeem in de normale modus wordt gezet.
De procedure moet worden uitgevoerd voordat het systeem in de normale modus wordt gezet.
Om de procedure te starten, moet het hefsysteem tijdelijk in bedrijf zijn. Tot het einde van de handmatige leerprocedure zijn de veiligheidscontacten op de veiligheidsketting aangesloten, maar ze werken nog niet (eindschakelaar, inspectie-eindschakelaar, OSG, eSGC) omdat ELGO de werkelijke positie van de eindpunten van de as niet kent. De enige controle op basis van ELGO Device is Teach over speed (0,4 m/s), dus als de cabinesnelheid hoger is dan 0,4 m/s, opent ELGO het OC-contact (en sluit het OC-contact als de cabine stilstaat).
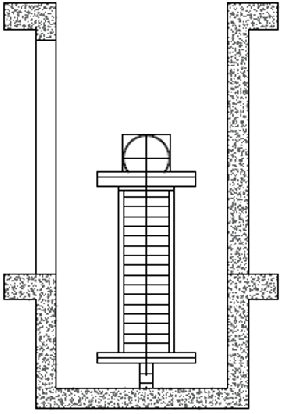 1) - Zet de lift wagen in de hoogste stand (contragewicht op buffers).
1) - Zet de lift wagen in de hoogste stand (contragewicht op buffers).
2) - Druk 3 keer gelijktijdig op de OMHOOG- en OMLAAG-toets van de inspectiebox om het ELGO-apparaat in de Leermodus te zetten. Op het playpad knippert de melding WAIT (als de procedure wordt afgebroken met een foutmelding ELGO, zie Problemen oplossen).
ELGO schakelt de led MODE in en begint akoestische feedback te geven (één pieptoon om de 2 seconden). Dit geluidssignaal blijft gedurende de hele Leerprocedure aanwezig. Op het playpad knippert de boodschap "TOP".
 3) - Druk 3 keer gelijktijdig op de toetsen OMHOOG en OMLAAG van de inspectiebox om het hoogste punt van de as in ELGO op te slaan. Dit punt wordt het referentiepunt voor de Bovengrenzen (Boveneindschakelaar, Bovenste inspectielimiet, TOP ETSL-regeling, enz.).
3) - Druk 3 keer gelijktijdig op de toetsen OMHOOG en OMLAAG van de inspectiebox om het hoogste punt van de as in ELGO op te slaan. Dit punt wordt het referentiepunt voor de Bovengrenzen (Boveneindschakelaar, Bovenste inspectielimiet, TOP ETSL-regeling, enz.).
De Het ELGO-apparaat geeft een lange akoestische feedback om te bevestigen dat de bovengrensgegevens werden geregistreerd.
Op het playpad knippert "Verdieping n" (n is de verdieping die je gaat opnemen).
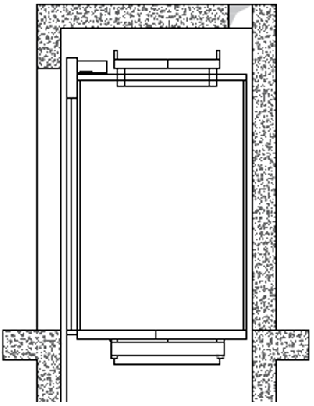
4) - Verplaats de cabine naar de hoogste verdieping.
Druk 3 keer tegelijkertijd op de toetsen OMHOOG en OMLAAG van de inspectiebox om de vloerpositie in ELGO op te nemen.
De Het ELGO-apparaat geeft een korte akoestische feedback om te bevestigen dat de vloergegevens werden geregistreerd.
Op het playpad knippert "Verdieping n-1" (n-1 is de volgende verdieping die je gaat opnemen).
 5) - Verplaats de cabine naar beneden tot de volgende verdieping.
5) - Verplaats de cabine naar beneden tot de volgende verdieping.
Druk 3 keer tegelijkertijd op de toetsen OMHOOG en OMLAAG van de inspectiebox om de vloerpositie in ELGO op te slaan.
Het ELGO-apparaat geeft een korte akoestische feedback om te bevestigen dat de vloergegevens werden geregistreerd.
6) - Herhaal het vorige punt tot de laagste verdieping is bereikt.
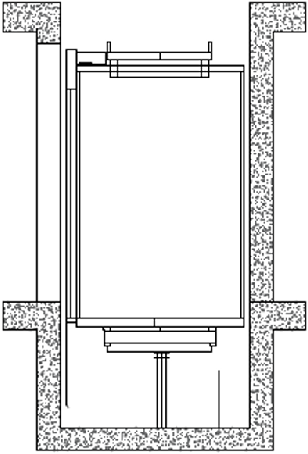
7) - Na opname van de Positie bodem op het afspeelpad knippert "BOTTOM".Beweeg de cabine naar het laagste punt van de as (cabine op de buffers).
Druk 3 keer gelijktijdig op de toetsen OMHOOG en OMLAAG van de inspectiebox om de laagste positie in ELGO op te slaan. Dit punt is de oorsprong van de magnetische band (0 mm getoond) en zal het referentiepunt zijn voor de bodemlimieten (onderste eindschakelaar, onderste inspectiegrens, onderste ETSL-regeling, enz.).
Het ELGO-apparaat geeft een lange akoestische feedback om de registratie van de gegevens te bevestigen.
Op dit moment registreert de controller automatisch:
- Positie van verworven verdiepingen;
- Positie deurzone, gebruikt door de controller om deurcontacten te omzeilen (voor openen / opnieuw nivelleren).
- Vertragingsafstand, volgens de liftsnelheid.
 Op het bedieningspaneel knippert de melding "/": Breng de lift naar de onderste verdieping. De besturing zet de ELGO in de normale modus. (dit was voorheen niet mogelijk omdat de ELGO dan op de limiet zou staan om OC te openen en de cabine te vergrendelen).
Op het bedieningspaneel knippert de melding "/": Breng de lift naar de onderste verdieping. De besturing zet de ELGO in de normale modus. (dit was voorheen niet mogelijk omdat de ELGO dan op de limiet zou staan om OC te openen en de cabine te vergrendelen).
Op het playpad knippert gedurende 10 seconden "WAIT". Wacht tot Floor 0 wordt weergegeven.
Het ELGO-apparaat stopt met de akoestische pieptoon en de led MODE begint te knipperen (1 knippering per seconde).
Nu werkt het ELGO-apparaat voor veiligheidscontacten:
- Elektronische veiligheidsuitrusting (indien aanwezig)
- Elektronische OSG.
- Eindschakelaars.
- De inspectie-eindschakelaars worden nog niet beheerd omdat de lift in de tijdelijke modus staat..
Vóór de normale bedrijfsmodus is het verplicht om een automatische asinleerprocedure uit te voeren om de juiste stopafstanden in opwaartse en neerwaartse richting voor elke verdieping in te stellen.
Automatische leerprocedure
9) - De lift moet in tijdelijke werking zijn. Zet de lift op de onderste verdieping met de helft van de maximale belasting.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Zet de inspectiekeuzeknop op Normaal
De lift begint automatisch te bewegen:
- Opwaartse ritten met vertraging en stoppen bij elke verdieping.
- Neerwaartse ritten met vertraging en stops op elke verdieping.
Wanneer de cabine terugkeert naar de laagste verdieping, is het systeem klaar om over te schakelen naar normaal bedrijf.
After automatic learning procedure in <Positioning>, Monitor encoder je kunt instellen:
- Vertragingsafstanden bij normaal bedrijf voor vertragingscomfort
- R1S (Pag. 3) opwaartse vertragingsafstand
- R1D (Pag. 2) neerwaartse vertragingsafstand
Deze waarden worden automatisch ingesteld na automatisch leren volgens de snelheid van de lift (zie liftsnelheid en vertragingsafstand).
- Stop afstanden bij de inspectie van de as
- I_LIM_S opwaartse stopafstand vóór bovenste vloerpositie
- I_LIM_D neerwaartse stopafstand vóór bodempositie
In Verminderde kop/kuil moeten deze waarden in aanmerking worden genomen volgens het Pre-Triggered veiligheidssysteem.
- Stopafstanden bij normale werking
- N_LIM_S opwaartse stopafstand na hoogste vloerpositie
- N_LIM_D neerwaartse stopafstand na onderste vloerpositie
Deze waarden worden automatisch ingesteld na automatisch leren op een afstand gelijk aan 30 mm van extreme vloeren (in het geval van minder afstand tot referentiepunten wordt het als het middelste punt tussen extreme vloer en extreme referentieposities beschouwd).
- ELGO+eSGC pre-triggerpositie
- TRIPS afstand vanaf bovenkant Referentiepositie waar het elektrische commando eSGC de cabine tot stilstand dwingt (alleen voor gereduceerde hefinrichting).
- TRIPD afstand vanaf onderkant Referentiepositie waar het elektrische commando eSGC de cabine tot stilstand dwingt (alleen voor installatie met verlaagde put)
Deze waarden zijn Read Only-waarden en zijn alleen groter dan 0 mm als ELGO deel uitmaakt van het systeem Safety pre.-Triggered (samen met elektrisch voorschakelapparaat / Overspeed Governor).
Als er bij de installatie niet voldoende vrije ruimte is (gereduceerde kop), wordt aanbevolen om de handmatige bediening van buiten de liftschacht uit te voeren (ten minste de eerste 3 stappen): In dit geval kunt u de Inspection BOX binnen de controller gebruiken en na de Top of ar Inspection BOX.
Om de procedure te starten, moet het hefsysteem tijdelijk in bedrijf zijn. Tot het einde van de handmatige leerprocedure zijn de veiligheidscontacten op de veiligheidsketting aangesloten, maar ze werken nog niet (eindschakelaar, inspectie-eindschakelaar, OSG, eSGC) omdat ELGO de werkelijke positie van de eindpunten van de as niet kent. De enige controle op basis van ELGO Device is Teach over speed (0,4 m/s), dus als de cabinesnelheid hoger is dan 0,4 m/s, opent ELGO het OC-contact (en sluit het OC-contact als de cabine stilstaat).
1) - Zet de lift wagen in de hoogste stand (contragewicht op buffers).2) - Druk 3 keer gelijktijdig op de OMHOOG- en OMLAAG-toets van de inspectiebox om het ELGO-apparaat in de Leermodus te zetten. Op het playpad knippert de melding WAIT (als de procedure wordt afgebroken met een foutmelding ELGO, zie Problemen oplossen).
ELGO schakelt de led MODE in en begint akoestische feedback te geven (één pieptoon om de 2 seconden). Dit geluidssignaal blijft gedurende de hele Leerprocedure aanwezig. Op het playpad knippert de boodschap "TOP".
3) - Druk 3 keer gelijktijdig op de toetsen OMHOOG en OMLAAG van de inspectiebox om het hoogste punt van de as in ELGO op te slaan. Dit punt wordt het referentiepunt voor de Bovengrenzen (Boveneindschakelaar, Bovenste inspectielimiet, TOP ETSL-regeling, enz.).De Het ELGO-apparaat geeft een lange akoestische feedback om te bevestigen dat de bovengrensgegevens werden geregistreerd.
Op het playpad knippert "Verdieping n" (n is de verdieping die je gaat opnemen).
4) - Verplaats de cabine naar de hoogste verdieping.
Druk 3 keer tegelijkertijd op de toetsen OMHOOG en OMLAAG van de inspectiebox om de vloerpositie in ELGO op te nemen.
De Het ELGO-apparaat geeft een korte akoestische feedback om te bevestigen dat de vloergegevens werden geregistreerd.
Op het playpad knippert "Verdieping n-1" (n-1 is de volgende verdieping die je gaat opnemen).
5) - Verplaats de cabine naar beneden tot de volgende verdieping.Druk 3 keer tegelijkertijd op de toetsen OMHOOG en OMLAAG van de inspectiebox om de vloerpositie in ELGO op te slaan.
Het ELGO-apparaat geeft een korte akoestische feedback om te bevestigen dat de vloergegevens werden geregistreerd.
6) - Herhaal het vorige punt tot de laagste verdieping is bereikt.
7) - Na opname van de Positie bodem op het afspeelpad knippert "BOTTOM".Beweeg de cabine naar het laagste punt van de as (cabine op de buffers).
Druk 3 keer gelijktijdig op de toetsen OMHOOG en OMLAAG van de inspectiebox om de laagste positie in ELGO op te slaan. Dit punt is de oorsprong van de magnetische band (0 mm getoond) en zal het referentiepunt zijn voor de bodemlimieten (onderste eindschakelaar, onderste inspectiegrens, onderste ETSL-regeling, enz.).
Het ELGO-apparaat geeft een lange akoestische feedback om de registratie van de gegevens te bevestigen.
Op dit moment registreert de controller automatisch:
- Positie van verworven verdiepingen;
- Positie deurzone, gebruikt door de controller om deurcontacten te omzeilen (voor openen / opnieuw nivelleren).
- Vertragingsafstand, volgens de liftsnelheid.
Op het bedieningspaneel knippert de melding "/": Breng de lift naar de onderste verdieping. De besturing zet de ELGO in de normale modus. (dit was voorheen niet mogelijk omdat de ELGO dan op de limiet zou staan om OC te openen en de cabine te vergrendelen).Op het playpad knippert gedurende 10 seconden "WAIT". Wacht tot Floor 0 wordt weergegeven.
Het ELGO-apparaat stopt met de akoestische pieptoon en de led MODE begint te knipperen (1 knippering per seconde).
Nu werkt het ELGO-apparaat voor veiligheidscontacten:
- Elektronische veiligheidsuitrusting (indien aanwezig)
- Elektronische OSG.
- Eindschakelaars.
- De inspectie-eindschakelaars worden nog niet beheerd omdat de lift in de tijdelijke modus staat..
Vóór de normale bedrijfsmodus is het verplicht om een automatische asinleerprocedure uit te voeren om de juiste stopafstanden in opwaartse en neerwaartse richting voor elke verdieping in te stellen.
Automatische leerprocedure
9) - De lift moet in tijdelijke werking zijn. Zet de lift op de onderste verdieping met de helft van de maximale belasting.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Zet de inspectiekeuzeknop op Normaal
De lift begint automatisch te bewegen:
- Opwaartse ritten met vertraging en stoppen bij elke verdieping.
- Neerwaartse ritten met vertraging en stops op elke verdieping.
Wanneer de cabine terugkeert naar de laagste verdieping, is het systeem klaar om over te schakelen naar normaal bedrijf.
After automatic learning procedure in <Positioning>, Monitor encoder je kunt instellen:
- Vertragingsafstanden bij normaal bedrijf voor vertragingscomfort
- R1S (Pag. 3) opwaartse vertragingsafstand
- R1D (Pag. 2) neerwaartse vertragingsafstand
Deze waarden worden automatisch ingesteld na automatisch leren volgens de snelheid van de lift (zie liftsnelheid en vertragingsafstand).
- Stop afstanden bij de inspectie van de as
- I_LIM_S opwaartse stopafstand vóór bovenste vloerpositie
- I_LIM_D neerwaartse stopafstand vóór bodempositie
In Verminderde kop/kuil moeten deze waarden in aanmerking worden genomen volgens het Pre-Triggered veiligheidssysteem.
- Stopafstanden bij normale werking
- N_LIM_S opwaartse stopafstand na hoogste vloerpositie
- N_LIM_D neerwaartse stopafstand na onderste vloerpositie
Deze waarden worden automatisch ingesteld na automatisch leren op een afstand gelijk aan 30 mm van extreme vloeren (in het geval van minder afstand tot referentiepunten wordt het als het middelste punt tussen extreme vloer en extreme referentieposities beschouwd).
- ELGO+eSGC pre-triggerpositie
- TRIPS afstand vanaf bovenkant Referentiepositie waar het elektrische commando eSGC de cabine tot stilstand dwingt (alleen voor gereduceerde hefinrichting).
- TRIPD afstand vanaf onderkant Referentiepositie waar het elektrische commando eSGC de cabine tot stilstand dwingt (alleen voor installatie met verlaagde put)
Deze waarden zijn Read Only-waarden en zijn alleen groter dan 0 mm als ELGO deel uitmaakt van het systeem Safety pre.-Triggered (samen met elektrisch voorschakelapparaat / Overspeed Governor).
DMG-encoder of motorencoder: Automatische leerprocedure van vloeren
Na de installatie en tijdens de TIJDELIJKE BEDIENING voert de controller een aantal opwaartse/ neerwaartse testruns uit (eerst hoge snelheid, dan lage snelheid met stops bij vloeren) om de exacte vloerpositionering te leren.
Zelflerende procedure:
1) - Zorg ervoor dat de installatie in de modus "Tijdelijke werking" staat.
2) - Controleer of de encoder de juiste looprichting volgt (toenemende afstand bij opwaarts, afnemende afstand bij neerwaarts); stel indien nodig in het menu "Positionering" de parameter Positioneersysteem in van rechtsom naar linksom (of omgekeerd) en sla de nieuwe instelling op.

3) - Controleer of de ZP-ingang (deurzone) correct is afgelezen (de ZP-led op de PLAYPAD-module moet branden als hij zich in de deurzone bevindt).
4) - Controleer de correcte aflezing van de ingangen AGB/AGH (vertragingseindschakelaars) (AGB/AGH moet open zijn in de eindposities van de vertraging).
5) - Zorg ervoor dat de cabine zich op de onderste verdieping bevindt (AGB open, ZP LED aan)
6) - Ga naar het menu "Positionering", selecteer de parameter Auto instelling en geef Enter:
- Op de DMG-encoder: de encoderresolutie (64 of 100 pulsaantal afhankelijk van het encodermodel), vervolgens de lengte van de vloermagneten. (Lengte deurzone). Bevestig het totale aantal verdiepingen en druk vervolgens op "Ja" om de procedure te starten.
- Op de motor-encoder: de encoderresolutie, de motorverhouding, de tractiepoelie en het touw. Bevestig het totale aantal verdiepingen en druk vervolgens op "Ja" om de procedure te starten.
7) - Zet de keuzeschakelaar van het inspectiepaneel op NORMAAL (indien aanwezig), zorg er anders voor dat de veiligheidsketting gesloten is.
Het systeem voert de volgende automatische procedure uit:
- Omhoog bewegen, totdat het signaal ZP van de onderste verdieping is gedeactiveerd
- Naar beneden bewegen totdat het signaal ZP van de onderste verdieping wordt geactiveerd
- Omhoog bewegen met hoge snelheid en positiedetectie voor elke verdieping (onderkant magneten deurzone); de exacte positie van de onderkant van de magneet wordt opgeslagen in het geheugen van de controller.
- Bij het bereiken van het bovenste vertragingspunt (AGH) schakelt het systeem over op lage snelheid en bij het bereiken van de deurzone van de bovenste verdieping (ZP) stopt het.
- Naar beneden bewegen met hoge snelheid en positiedetectie voor elke verdieping (bovenrand magneten deurzone); de exacte positie van de bovenrand van de magneet wordt opgeslagen in het geheugen van de controller.
- Bij het bereiken van het onderste vertragingspunt (AGB) schakelt het systeem over op lage snelheid en bij het bereiken van de onderste deurzone (ZP) stopt het.
- Omhoog bewegen, vertragen en stoppen op elke verdieping (op ZP-magneetniveau)
- Naar beneden bewegen vertraagt en stopt bij elke verdieping (op ZP-magneetniveau)
Na de tweede reeks (die eindigt op de laagste verdieping) is de installatie klaar om in DIENSTmodus te gaan.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
OPMERKINGDe zelfleerprocedure moet elke keer worden uitgevoerd als de eindschakelaars AGB/AGH en/of de magneten van de deurzone uit hun oorspronkelijke positie worden verplaatst.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH afstanden voldoende zijn voor de hefsnelheid. Is het mogelijk om de vertragingsafstanden in Normale modus R1S en R1D te vergroten/verkleinen zonder de automatische inleerprocedure te hoeven herhalen?
Gebruik voor AGB/AGH-posities en vertragingsafstanden tabel volgens de snelheid van de lift.
In systemen waar de minimaal vereiste afmetingen aan de boven- en onderkant van de schacht gegarandeerd zijn volgens de vereisten van de norm EN 81, is het mogelijk om twee parameters te gebruiken om de lift in Inspectie te stoppen.
In <Positioning>, Monitor encoder
- I_LIM_S opwaartse stopafstand vóór bovenste vloerpositie
- I_LIM_D neerwaartse stopafstand vóór bodempositie
Deze stopafstanden gelden voor inspectie vanuit de schacht (zijn niet actief bij inspectie vanuit de machinekamer) en kunnen worden gebruikt om het risico te vermijden dat de technicus in de liftschacht vast komt te zitten.
Denk eraan dat deze stopposities geen veiligheidscontacten zijn.
Zelflerende procedure:
1) - Zorg ervoor dat de installatie in de modus "Tijdelijke werking" staat.
2) - Controleer of de encoder de juiste looprichting volgt (toenemende afstand bij opwaarts, afnemende afstand bij neerwaarts); stel indien nodig in het menu "Positionering" de parameter Positioneersysteem in van rechtsom naar linksom (of omgekeerd) en sla de nieuwe instelling op.
3) - Controleer of de ZP-ingang (deurzone) correct is afgelezen (de ZP-led op de PLAYPAD-module moet branden als hij zich in de deurzone bevindt).
4) - Controleer de correcte aflezing van de ingangen AGB/AGH (vertragingseindschakelaars) (AGB/AGH moet open zijn in de eindposities van de vertraging).
5) - Zorg ervoor dat de cabine zich op de onderste verdieping bevindt (AGB open, ZP LED aan)
6) - Ga naar het menu "Positionering", selecteer de parameter Auto instelling en geef Enter:
- Op de DMG-encoder: de encoderresolutie (64 of 100 pulsaantal afhankelijk van het encodermodel), vervolgens de lengte van de vloermagneten. (Lengte deurzone). Bevestig het totale aantal verdiepingen en druk vervolgens op "Ja" om de procedure te starten.
- Op de motor-encoder: de encoderresolutie, de motorverhouding, de tractiepoelie en het touw. Bevestig het totale aantal verdiepingen en druk vervolgens op "Ja" om de procedure te starten.
7) - Zet de keuzeschakelaar van het inspectiepaneel op NORMAAL (indien aanwezig), zorg er anders voor dat de veiligheidsketting gesloten is.
Het systeem voert de volgende automatische procedure uit:
- Omhoog bewegen, totdat het signaal ZP van de onderste verdieping is gedeactiveerd
- Naar beneden bewegen totdat het signaal ZP van de onderste verdieping wordt geactiveerd
- Omhoog bewegen met hoge snelheid en positiedetectie voor elke verdieping (onderkant magneten deurzone); de exacte positie van de onderkant van de magneet wordt opgeslagen in het geheugen van de controller.
- Bij het bereiken van het bovenste vertragingspunt (AGH) schakelt het systeem over op lage snelheid en bij het bereiken van de deurzone van de bovenste verdieping (ZP) stopt het.
- Naar beneden bewegen met hoge snelheid en positiedetectie voor elke verdieping (bovenrand magneten deurzone); de exacte positie van de bovenrand van de magneet wordt opgeslagen in het geheugen van de controller.
- Bij het bereiken van het onderste vertragingspunt (AGB) schakelt het systeem over op lage snelheid en bij het bereiken van de onderste deurzone (ZP) stopt het.
- Omhoog bewegen, vertragen en stoppen op elke verdieping (op ZP-magneetniveau)
- Naar beneden bewegen vertraagt en stopt bij elke verdieping (op ZP-magneetniveau)
Na de tweede reeks (die eindigt op de laagste verdieping) is de installatie klaar om in DIENSTmodus te gaan.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
OPMERKINGDe zelfleerprocedure moet elke keer worden uitgevoerd als de eindschakelaars AGB/AGH en/of de magneten van de deurzone uit hun oorspronkelijke positie worden verplaatst.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH afstanden voldoende zijn voor de hefsnelheid. Is het mogelijk om de vertragingsafstanden in Normale modus R1S en R1D te vergroten/verkleinen zonder de automatische inleerprocedure te hoeven herhalen?
Gebruik voor AGB/AGH-posities en vertragingsafstanden tabel volgens de snelheid van de lift.
In systemen waar de minimaal vereiste afmetingen aan de boven- en onderkant van de schacht gegarandeerd zijn volgens de vereisten van de norm EN 81, is het mogelijk om twee parameters te gebruiken om de lift in Inspectie te stoppen.
In <Positioning>, Monitor encoder
- I_LIM_S opwaartse stopafstand vóór bovenste vloerpositie
- I_LIM_D neerwaartse stopafstand vóór bodempositie
Deze stopafstanden gelden voor inspectie vanuit de schacht (zijn niet actief bij inspectie vanuit de machinekamer) en kunnen worden gebruikt om het risico te vermijden dat de technicus in de liftschacht vast komt te zitten.
Denk eraan dat deze stopposities geen veiligheidscontacten zijn.
Video-handleiding
Hoe het ELGO positioneersysteem configureren met een controller Pitagora 4.0






