
Procedura di apprendimento di piani
Se quadro è dotato di Encoder Assoluto o Encoder DMG o Motor Encoder è possibile sfruttare la funzione di apprendimento della posizione piano , che permette una più rapida configurazione e messa a punto del sistema. La procedura è diversa a seconda del tipo di encoder, come descritto nelle sezioni seguenti:
ELGO LIMAX 33CP: Procedura di apprendimento
Procedura di apprendimento manuale
Se nell'installazione non c'è abbastanza spazio (Testa ridotta) si raccomanda di fare l'Insegnamento manuale dall'esterno dell'ascensore vano (almeno i primi 3 passi): In questo caso è possibile utilizzare il BOX d'ispezione all'interno di quadro e dopo il Top of ar Inspection BOX.
 La procedura deve essere fatta prima di mettere il sistema in modalità normale.
La procedura deve essere fatta prima di mettere il sistema in modalità normale.
Per iniziare la procedura l'ascensore deve essere in funzionamento temporaneo. Fino alla fine della procedura di apprendimento manuale i contatti di sicurezza sono collegati sulla catena di sicurezza ma non sono ancora operativi (finecorsa finale, finecorsa di ispezione, OSG, eSGC) perché ELGO non conosce la posizione reale dei punti limite del vano. L'unico controllo basato sul dispositivo ELGO è Teach over speed (0,4 m/s), quindi se la velocità della cabina è superiore a 0,4 m/s, l'ELGO apre il contatto OC (e chiude il contatto OC quando la cabina è ferma).
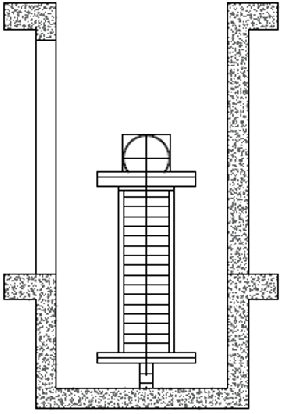 1) - Mettere l'ascensore macchina nella posizione più alta (contrappeso sui respingenti).
1) - Mettere l'ascensore macchina nella posizione più alta (contrappeso sui respingenti).
2) - Premete simultaneamente il tasto UP e DOWN del BOX d'ispezione 3 volte per mettere il dispositivo ELGO in modalità Teach. Sul playpad viene visualizzato un messaggio lampeggiante WAIT (in caso di problema la procedura esce con un guasto ELGO, vedi Risoluzione dei problemi).
Il dispositivo ELGO accende il led MODE e inizia a dare un feedback acustico (un bip ogni 2 secondi). Questo segnale acustico sarà presente durante tutta la procedura di apprendimento manuale. Sulla playpad compare una scritta lampeggiante "TOP".
 3) – Premere di nuovo simultaneamente il pulsante UP e DOWN del box d'ispezione 3 volte per registrare all'interno di ELGO il punto più alto del vano. Questo punto sarà il punto di riferimento per i limiti superiori (finecorsa superiore, limite di ispezione superiore, controllo TOP ETSL, ecc.).
3) – Premere di nuovo simultaneamente il pulsante UP e DOWN del box d'ispezione 3 volte per registrare all'interno di ELGO il punto più alto del vano. Questo punto sarà il punto di riferimento per i limiti superiori (finecorsa superiore, limite di ispezione superiore, controllo TOP ETSL, ecc.).
Il Il dispositivo ELGO fornisce un lungo feedback acustico per confermare che i dati del limite superiore sono stati registrati.
Sul playpad appare un messaggio lampeggiante "Piano n" (n è il piano che state per registrare).
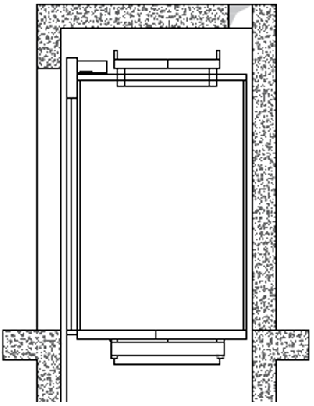
4) – Spostare la cabina fino al più alto piano.
Premete simultaneamente i pulsanti UP e DOWN del BOX d'ispezione 3 volte per registrare all'interno dell'ELGO la posizione piano .
Il Il dispositivo ELGO fornisce un breve feedback acustico per confermare che i dati di piano sono stati registrati.
Sul playpad appare un messaggio lampeggiante "Piano n-1" (n-1 è il prossimo piano che stai per registrare).
 5) – Spostare la cabina verso il basso fino al prossimo piano.
5) – Spostare la cabina verso il basso fino al prossimo piano.
Premete simultaneamente il pulsante UP e DOWN del BOX d'ispezione 3 volte per registrare all'interno dell'ELGO la posizione piano .
Il dispositivo ELGO dà un breve feedback acustico per confermare che i dati piano sono stati registrati.
6) – Ripetere il punto precedente fino a raggiungere il più basso piano .
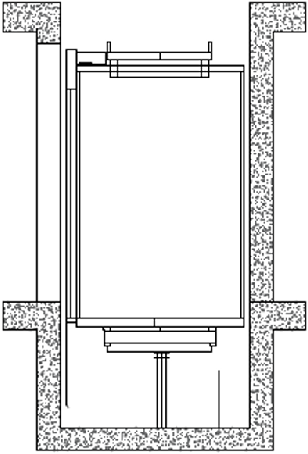
7) – Dopo la registrazione di il Fondo piano posizione sul playpad mostra un messaggio "BOTTOM" lampeggiante, spostare la Cabina nel punto più basso del vano (cabina sui respingenti).
Premere simultaneamente il pulsante UP e DOWN della Inspection BOX 3 volte per registrare all'interno di ELGO la posizione più bassa. Questo punto è l'origine della banda magnetica (0 mm mostrato) e sarà il punto di riferimento per i limiti inferiori (finecorsa inferiore, limite di ispezione inferiore, controllo ETSL inferiore, ecc.).
Il dispositivo ELGO dà un lungo feedback acustico per confermare la registrazione dei dati.
In questo momento quadro registra automaticamente:
- Posizione acquisita piani;
- Posizione della zona della porta, usata dal quadro per abilitare il bypass dei contatti della porta (preapertura / ri-livellamento).
- Distanza di decelerazione, secondo la velocità dell'ascensore.
 Sul playpad compare un messaggio lampeggiante "/\": Spostare l'ascensore fino alla posizione inferiore piano . Il quadro metterà l'ELGO in modalità normale. (prima non era possibile perché l'ELGO sarebbe stato al limite aprendo OC e bloccando la cabina).
Sul playpad compare un messaggio lampeggiante "/\": Spostare l'ascensore fino alla posizione inferiore piano . Il quadro metterà l'ELGO in modalità normale. (prima non era possibile perché l'ELGO sarebbe stato al limite aprendo OC e bloccando la cabina).
Sulla playpad viene mostrato un messaggio lampeggiante "WAIT" per 10 secondi, attendere fino a quando verrà mostrato Piano 0.
Il dispositivo ELGO interrompe il segnale acustico e il led MODE inizia a lampeggiare (1 lampeggio al secondo).
Ora il dispositivo ELGO è operativo per i contatti di sicurezza:
- Dispositivo elettronico di sicurezza (se presente)
- OSG elettronico.
- Finecorsa finali.
- I finecorsa di ispezione non sono ancora gestiti perché l'ascensore è in modalità provvisoria.
Prima della modalità di funzionamento normale, è obbligatorio eseguire un apprendimento automatico vano per impostare le corrette distanze di arresto in direzione ascendente e discendente per ogni piano.
Procedura di apprendimento automatico
9) - L'ascensore deve essere in funzionamento temporaneo. Mettere l'ascensore sul fondo piano con metà del carico massimo.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Girare il selettore d'ispezione su Normal
L'ascensore inizia a muoversi automaticamente:
- Viaggi verso l'alto con decelerazione e arresto ad ogni piano.
- Viaggi verso il basso con decelerazione e fermate ad ogni piano.
Quando la cabina torna al più basso piano il sistema è pronto per passare al servizio normale.
After automatic learning procedure in <Positioning>, Monitor Encoder è possibile impostare:
- Distanze di decelerazione in servizio normale per confort di decelerazione
- R1S (Pag. 3) distanza di decelerazione verso l'alto
- R1D (Pag. 2) distanza di decelerazione verso il basso
Questi valori sono impostati automaticamente dopo l'apprendimento automatico in base alla velocità dell'ascensore (vedere velocità di sollevamento e distanza di decelerazione).
- Fermare le distanze in vano's Inspection
- I_LIM_S distanza di arresto verso l'alto prima della posizione superiore piano
- I_LIM_D distanza di arresto verso il basso prima della posizione inferiore piano
In Reduced Head/Pit questi valori devono essere considerati secondo il sistema di sicurezza Pre-Triggered.
- Distanze di arresto in servizio normale
- N_LIM_S distanza di arresto verso l'alto dopo la posizione superiore piano
- N_LIM_D distanza di arresto verso il basso dopo la posizione inferiore piano
Questi valori sono impostati automaticamente dopo l'apprendimento automatico a una distanza pari a 30 mm dall'estremo piani (in caso di distanza inferiore dai punti di riferimento è considerato il punto medio tra l'estremo piano e le posizioni estreme di riferimento).
- ELGO+eSGC posizione pre-Trigger
- Distanza TRIPS dall'alto Posizione di riferimento in cui il comando elettrico eSGC forza la cabina a fermarsi (solo per l'ascensore a testa ridotta).
- Distanza TRIPD dal fondo Posizione di riferimento in cui il comando elettrico eSGC forza la cabina ad arrestarsi (solo per l'installazione della fossa ridotta)
Questi valori sono di sola lettura e sono maggiori di 0 mm solo se ELGO fa parte del sistema Safety pre.-Triggered (insieme al Safety Gear elettrico / Overspeed Governor).
Se nell'installazione non c'è abbastanza spazio (Testa ridotta) si raccomanda di fare l'Insegnamento manuale dall'esterno dell'ascensore vano (almeno i primi 3 passi): In questo caso è possibile utilizzare il BOX d'ispezione all'interno di quadro e dopo il Top of ar Inspection BOX.
Per iniziare la procedura l'ascensore deve essere in funzionamento temporaneo. Fino alla fine della procedura di apprendimento manuale i contatti di sicurezza sono collegati sulla catena di sicurezza ma non sono ancora operativi (finecorsa finale, finecorsa di ispezione, OSG, eSGC) perché ELGO non conosce la posizione reale dei punti limite del vano. L'unico controllo basato sul dispositivo ELGO è Teach over speed (0,4 m/s), quindi se la velocità della cabina è superiore a 0,4 m/s, l'ELGO apre il contatto OC (e chiude il contatto OC quando la cabina è ferma).
1) - Mettere l'ascensore macchina nella posizione più alta (contrappeso sui respingenti).2) - Premete simultaneamente il tasto UP e DOWN del BOX d'ispezione 3 volte per mettere il dispositivo ELGO in modalità Teach. Sul playpad viene visualizzato un messaggio lampeggiante WAIT (in caso di problema la procedura esce con un guasto ELGO, vedi Risoluzione dei problemi).
Il dispositivo ELGO accende il led MODE e inizia a dare un feedback acustico (un bip ogni 2 secondi). Questo segnale acustico sarà presente durante tutta la procedura di apprendimento manuale. Sulla playpad compare una scritta lampeggiante "TOP".
3) – Premere di nuovo simultaneamente il pulsante UP e DOWN del box d'ispezione 3 volte per registrare all'interno di ELGO il punto più alto del vano. Questo punto sarà il punto di riferimento per i limiti superiori (finecorsa superiore, limite di ispezione superiore, controllo TOP ETSL, ecc.).Il Il dispositivo ELGO fornisce un lungo feedback acustico per confermare che i dati del limite superiore sono stati registrati.
Sul playpad appare un messaggio lampeggiante "Piano n" (n è il piano che state per registrare).
4) – Spostare la cabina fino al più alto piano.
Premete simultaneamente i pulsanti UP e DOWN del BOX d'ispezione 3 volte per registrare all'interno dell'ELGO la posizione piano .
Il Il dispositivo ELGO fornisce un breve feedback acustico per confermare che i dati di piano sono stati registrati.
Sul playpad appare un messaggio lampeggiante "Piano n-1" (n-1 è il prossimo piano che stai per registrare).
5) – Spostare la cabina verso il basso fino al prossimo piano.Premete simultaneamente il pulsante UP e DOWN del BOX d'ispezione 3 volte per registrare all'interno dell'ELGO la posizione piano .
Il dispositivo ELGO dà un breve feedback acustico per confermare che i dati piano sono stati registrati.
6) – Ripetere il punto precedente fino a raggiungere il più basso piano .
7) – Dopo la registrazione di il Fondo piano posizione sul playpad mostra un messaggio "BOTTOM" lampeggiante, spostare la Cabina nel punto più basso del vano (cabina sui respingenti).
Premere simultaneamente il pulsante UP e DOWN della Inspection BOX 3 volte per registrare all'interno di ELGO la posizione più bassa. Questo punto è l'origine della banda magnetica (0 mm mostrato) e sarà il punto di riferimento per i limiti inferiori (finecorsa inferiore, limite di ispezione inferiore, controllo ETSL inferiore, ecc.).
Il dispositivo ELGO dà un lungo feedback acustico per confermare la registrazione dei dati.
In questo momento quadro registra automaticamente:
- Posizione acquisita piani;
- Posizione della zona della porta, usata dal quadro per abilitare il bypass dei contatti della porta (preapertura / ri-livellamento).
- Distanza di decelerazione, secondo la velocità dell'ascensore.
Sul playpad compare un messaggio lampeggiante "/\": Spostare l'ascensore fino alla posizione inferiore piano . Il quadro metterà l'ELGO in modalità normale. (prima non era possibile perché l'ELGO sarebbe stato al limite aprendo OC e bloccando la cabina).Sulla playpad viene mostrato un messaggio lampeggiante "WAIT" per 10 secondi, attendere fino a quando verrà mostrato Piano 0.
Il dispositivo ELGO interrompe il segnale acustico e il led MODE inizia a lampeggiare (1 lampeggio al secondo).
Ora il dispositivo ELGO è operativo per i contatti di sicurezza:
- Dispositivo elettronico di sicurezza (se presente)
- OSG elettronico.
- Finecorsa finali.
- I finecorsa di ispezione non sono ancora gestiti perché l'ascensore è in modalità provvisoria.
Prima della modalità di funzionamento normale, è obbligatorio eseguire un apprendimento automatico vano per impostare le corrette distanze di arresto in direzione ascendente e discendente per ogni piano.
Procedura di apprendimento automatico
9) - L'ascensore deve essere in funzionamento temporaneo. Mettere l'ascensore sul fondo piano con metà del carico massimo.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Girare il selettore d'ispezione su Normal
L'ascensore inizia a muoversi automaticamente:
- Viaggi verso l'alto con decelerazione e arresto ad ogni piano.
- Viaggi verso il basso con decelerazione e fermate ad ogni piano.
Quando la cabina torna al più basso piano il sistema è pronto per passare al servizio normale.
After automatic learning procedure in <Positioning>, Monitor Encoder è possibile impostare:
- Distanze di decelerazione in servizio normale per confort di decelerazione
- R1S (Pag. 3) distanza di decelerazione verso l'alto
- R1D (Pag. 2) distanza di decelerazione verso il basso
Questi valori sono impostati automaticamente dopo l'apprendimento automatico in base alla velocità dell'ascensore (vedere velocità di sollevamento e distanza di decelerazione).
- Fermare le distanze in vano's Inspection
- I_LIM_S distanza di arresto verso l'alto prima della posizione superiore piano
- I_LIM_D distanza di arresto verso il basso prima della posizione inferiore piano
In Reduced Head/Pit questi valori devono essere considerati secondo il sistema di sicurezza Pre-Triggered.
- Distanze di arresto in servizio normale
- N_LIM_S distanza di arresto verso l'alto dopo la posizione superiore piano
- N_LIM_D distanza di arresto verso il basso dopo la posizione inferiore piano
Questi valori sono impostati automaticamente dopo l'apprendimento automatico a una distanza pari a 30 mm dall'estremo piani (in caso di distanza inferiore dai punti di riferimento è considerato il punto medio tra l'estremo piano e le posizioni estreme di riferimento).
- ELGO+eSGC posizione pre-Trigger
- Distanza TRIPS dall'alto Posizione di riferimento in cui il comando elettrico eSGC forza la cabina a fermarsi (solo per l'ascensore a testa ridotta).
- Distanza TRIPD dal fondo Posizione di riferimento in cui il comando elettrico eSGC forza la cabina ad arrestarsi (solo per l'installazione della fossa ridotta)
Questi valori sono di sola lettura e sono maggiori di 0 mm solo se ELGO fa parte del sistema Safety pre.-Triggered (insieme al Safety Gear elettrico / Overspeed Governor).
Encoder DMG o Encoder motore: Procedura di apprendimento automatico di piani
Dopo l'installazione e durante la modalità di FUNZIONAMENTO TEMPORANEO, il sito quadro esegue una serie di corse di prova in salita/discesa (prima ad alta velocità, poi a bassa velocità con fermate su piani) con lo scopo di imparare l'esatto posizionamento di piano .
Procedura di autoapprendimento:
1) – Assicuratevi che l'installazione sia in modalità "Funzionamento temporaneo
2) – Assicurarsi che l'encoder tracci il corretto senso di marcia, (distanza crescente quando si sale, distanza decrescente quando si scende); se necessario, nel menu "posizionamento" impostare il parametro Sistema di posizionamento da orario ad antiorario (o viceversa) e salvare la nuova impostazione.

3) – Controllare la corretta lettura dell'ingresso ZP (zona della porta) (il LED ZP sul modulo PLAYPAD deve essere acceso quando si trova nella zona della porta)
4) – Controllare la corretta lettura degli ingressi AGB/AGH (finecorsa di decelerazione) (AGB/AGH devono essere aperti quando sono nelle posizioni limite di decelerazione)
5) – Assicurarsi che la cabina sia al fondo piano (AGB aperto, LED ZP acceso)
6) – Entrare nel menu "Posizionamento", selezionare il parametro Impostazione automatica ed entrare:
- Sull'encoder DMG: la risoluzione dell'encoder (64 o 100 impulsi a seconda del modello di encoder), quindi la lunghezza dei magneti piano . (lunghezza della zona porta). Confermare il numero totale di piano, quindi premere "Sì" per avviare la procedura.
- Sull'encoder del motore: la risoluzione dell'encoder, il rapporto del motore, la puleggia di trazione e la corda. Confermare il numero totale di piano, poi premere "Yes" per iniziare la procedura.
7) – Impostare il selettore del pannello d'ispezione su NORMAL (se presente), altrimenti assicurarsi che la catena di sicurezza sia chiusa.
Il sistema esegue la seguente procedura automatica:
- Spostandosi verso l'alto, fino a quando il segnale ZP del fondo piano è disattivato
- Spostandosi verso il basso, fino a quando il segnale ZP del fondo piano è attivato
- Spostamento verso l'alto ad alta velocità e rilevamento della posizione per ogni piano (bordo inferiore dei magneti della zona della porta); la posizione esatta del bordo inferiore del magnete è memorizzata nella memoria di quadro .
- Quando si raggiunge il punto di decelerazione superiore (AGH) il sistema passa a bassa velocità e quando si raggiunge la zona della porta superiore piano (ZP) si ferma.
- Spostamento verso il basso ad alta velocità e rilevamento della posizione per ogni piano (bordo superiore dei magneti della zona della porta); la posizione esatta del bordo superiore del magnete è memorizzata nella memoria di quadro .
- Quando si raggiunge il punto di decelerazione inferiore (AGB) il sistema passa a bassa velocità e quando si raggiunge la zona della porta inferiore piano (ZP) si ferma.
- Salendo, rallentando e fermandosi ad ogni piano (a livello del magnete ZP)
- Scendere rallentando e fermandosi ad ogni piano (a livello del magnete ZP)
Dopo la seconda serie di corse (che termina al più bassa piano), l'installazione è pronta per andare in modalità SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTAla procedura di autoapprendimento deve essere eseguita ogni volta che i finecorsa AGB/AGH e/o i magneti della zona della porta vengono spostati dalla loro posizione originale.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH sono sufficienti per la velocità dell'ascensore. È possibile aumentare/diminuire le distanze di decelerazione nel servizio normale R1S e R1D senza dover ripetere la procedura di apprendimento automatico.
Per le posizioni AGB/AGH e le distanze di decelerazione usare tabella secondo la velocità dell'ascensore.
Nei sistemi in cui le dimensioni minime richieste nella parte superiore e inferiore del vano sono garantite secondo i requisiti della normativa EN 81, è possibile utilizzare due parametri per fermare l'ascensore in ispezione.
In <Positioning>, Monitor Encoder
- I_LIM_S distanza di arresto verso l'alto prima della posizione superiore piano
- I_LIM_D distanza di arresto verso il basso prima della posizione inferiore piano
Queste distanze di arresto sono valide per l'ispezione dal sito vano (non sono attive in caso di ispezione dalla sala macchine) e possono essere utilizzate per evitare il rischio che il tecnico rimanga intrappolato nell'ascensore vano.
Tenete presente che queste posizioni di arresto non sono contatti di sicurezza.
Procedura di autoapprendimento:
1) – Assicuratevi che l'installazione sia in modalità "Funzionamento temporaneo
2) – Assicurarsi che l'encoder tracci il corretto senso di marcia, (distanza crescente quando si sale, distanza decrescente quando si scende); se necessario, nel menu "posizionamento" impostare il parametro Sistema di posizionamento da orario ad antiorario (o viceversa) e salvare la nuova impostazione.
3) – Controllare la corretta lettura dell'ingresso ZP (zona della porta) (il LED ZP sul modulo PLAYPAD deve essere acceso quando si trova nella zona della porta)
4) – Controllare la corretta lettura degli ingressi AGB/AGH (finecorsa di decelerazione) (AGB/AGH devono essere aperti quando sono nelle posizioni limite di decelerazione)
5) – Assicurarsi che la cabina sia al fondo piano (AGB aperto, LED ZP acceso)
6) – Entrare nel menu "Posizionamento", selezionare il parametro Impostazione automatica ed entrare:
- Sull'encoder DMG: la risoluzione dell'encoder (64 o 100 impulsi a seconda del modello di encoder), quindi la lunghezza dei magneti piano . (lunghezza della zona porta). Confermare il numero totale di piano, quindi premere "Sì" per avviare la procedura.
- Sull'encoder del motore: la risoluzione dell'encoder, il rapporto del motore, la puleggia di trazione e la corda. Confermare il numero totale di piano, poi premere "Yes" per iniziare la procedura.
7) – Impostare il selettore del pannello d'ispezione su NORMAL (se presente), altrimenti assicurarsi che la catena di sicurezza sia chiusa.
Il sistema esegue la seguente procedura automatica:
- Spostandosi verso l'alto, fino a quando il segnale ZP del fondo piano è disattivato
- Spostandosi verso il basso, fino a quando il segnale ZP del fondo piano è attivato
- Spostamento verso l'alto ad alta velocità e rilevamento della posizione per ogni piano (bordo inferiore dei magneti della zona della porta); la posizione esatta del bordo inferiore del magnete è memorizzata nella memoria di quadro .
- Quando si raggiunge il punto di decelerazione superiore (AGH) il sistema passa a bassa velocità e quando si raggiunge la zona della porta superiore piano (ZP) si ferma.
- Spostamento verso il basso ad alta velocità e rilevamento della posizione per ogni piano (bordo superiore dei magneti della zona della porta); la posizione esatta del bordo superiore del magnete è memorizzata nella memoria di quadro .
- Quando si raggiunge il punto di decelerazione inferiore (AGB) il sistema passa a bassa velocità e quando si raggiunge la zona della porta inferiore piano (ZP) si ferma.
- Salendo, rallentando e fermandosi ad ogni piano (a livello del magnete ZP)
- Scendere rallentando e fermandosi ad ogni piano (a livello del magnete ZP)
Dopo la seconda serie di corse (che termina al più bassa piano), l'installazione è pronta per andare in modalità SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTAla procedura di autoapprendimento deve essere eseguita ogni volta che i finecorsa AGB/AGH e/o i magneti della zona della porta vengono spostati dalla loro posizione originale.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH sono sufficienti per la velocità dell'ascensore. È possibile aumentare/diminuire le distanze di decelerazione nel servizio normale R1S e R1D senza dover ripetere la procedura di apprendimento automatico.
Per le posizioni AGB/AGH e le distanze di decelerazione usare tabella secondo la velocità dell'ascensore.
Nei sistemi in cui le dimensioni minime richieste nella parte superiore e inferiore del vano sono garantite secondo i requisiti della normativa EN 81, è possibile utilizzare due parametri per fermare l'ascensore in ispezione.
In <Positioning>, Monitor Encoder
- I_LIM_S distanza di arresto verso l'alto prima della posizione superiore piano
- I_LIM_D distanza di arresto verso il basso prima della posizione inferiore piano
Queste distanze di arresto sono valide per l'ispezione dal sito vano (non sono attive in caso di ispezione dalla sala macchine) e possono essere utilizzate per evitare il rischio che il tecnico rimanga intrappolato nell'ascensore vano.
Tenete presente che queste posizioni di arresto non sono contatti di sicurezza.
Video tutorial
Come configurare il sistema di posizionamento ELGO con un quadro Pitagora 4.0






