
Inlärningsförfarande för golv
Om styrenheten är utrustad med Absolute Encoder eller DMG Encoder eller Motor Encoder är det möjligt att dra nytta av golvpositionsinlärningsfunktionen, vilket möjliggör en snabbare systemkonfiguration och finjustering. Förfarandet skiljer sig åt beroende på vilken typ av kodare som beskrivs i följande avsnitt:
ELGO LIMAX 33CP: Inlärningsprocedur
Manuell inlärningsprocedur
Om det i installationen inte finns tillräckligt med utrymme (reducerat huvud) rekommenderas att manualen lär ut från utsidan av lyftaxeln (åtminstone de första 3 stegen): I detta fall kan du använda Inspektionsboxen inuti styrenheten och efter top of ar Inspection BOX.
 Proceduren måste göras innan systemet försätts i normalt läge.
Proceduren måste göras innan systemet försätts i normalt läge.
För att starta proceduren måste hissen vara i tillfällig drift. Fram till slutet av manual teach proceduren är säkerhetskontakterna anslutna på säkerhetskedjan men är ännu inte operativa (Slutlig gränsbrytare, Inspektionsgränsbrytare, OSG, eSGC) eftersom ELGO inte känner till den verkliga positionen för axelns gränsvärden. Den enda kontrollen baserad på ELGO Device är Teach over speed (0,4 m/s), så om cabinspeed är högre än 0,4 m/s öppnar ELGO OC-kontakt (och stänger OC-kontakten efter att kabinen står stilla).
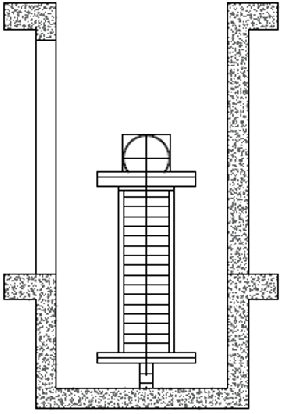 1) – Sätt hissen bilen i högsta läge (motvikt på buffertar).
1) – Sätt hissen bilen i högsta läge (motvikt på buffertar).
2) – Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att placera ELGO-enheten i teach-läge. På spelplattan visas ett VÄNTA blinkande meddelande (om problemproceduren avslutas med ett fel ELGO, se Felsökning).
ELGO-enheten slår på led-LÄGET och börjar ge akustisk feedback (ett pip varannan sekund). Denna akustiska signal kommer att finnas i hela den manuella undervisningsproceduren. På spelplattan visas ett "TOP" blinkande meddelande.
 3) – Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in den högsta punkten i axeln i ELGO. Denna punkt kommer att vara referenspunkten för toppgränser (toppgränsbrytare, topp inspektionsgräns, TOP ETSL-kontroll, etc.).
3) – Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in den högsta punkten i axeln i ELGO. Denna punkt kommer att vara referenspunkten för toppgränser (toppgränsbrytare, topp inspektionsgräns, TOP ETSL-kontroll, etc.).
Den ELGO-enheten ger en lång akustisk feedback för att bekräfta att toppgränsdata har registrerats.
På spelplattan visas ett "Floor n" blinkande meddelande (n är golvet du ska spela in).
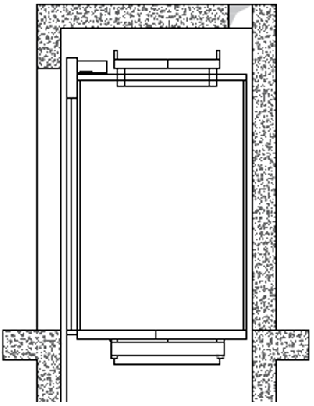
4) – Flytta kabinen upp till översta våningen.
Tryck samtidigt på upp- och nedknapparna i inspektionsboxen 3 gånger för att spela in golvläget i ELGO.
Den ELGO-enheten ger en kort akustisk feedback för att bekräfta att golvdata har registrerats.
På spelplattan visas ett "Floor n-1" blinkande meddelande (n-1 är nästa våning du ska spela in).
 5) – Flytta kabinen nedåt till nästa våning.
5) – Flytta kabinen nedåt till nästa våning.
Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in golvläget i ELGO.
ELGO-enheten ger en kort akustisk feedback för att bekräfta att golvdata har registrerats.
6) – Upprepa föregående punkt tills den lägsta våningen har nåtts.
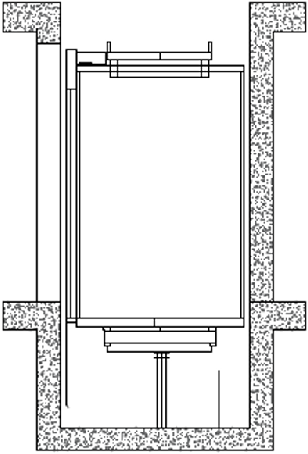
7) – Efter inspelning av den Nedre våningens position på spelplattan visas ett "BOTTOM" blinkande meddelande, flytta kabinen till axelns lägsta punkt (hytten på buffertarna).
Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in det lägsta läget i ELGO. Denna punkt är ursprunget till magnetbandet (0 mm visade) och kommer att vara referenspunkten för bottengränser (bottengränsbrytare, botteninspektionsgräns, botten ETSL-kontroll etc.).
ELGO-enheten ger en lång akustisk feedback för att bekräfta dataposten.
I det här ögonblicket registrerar styrenheten automatiskt:
• Placering av förvärvade golv;
• Dörrzonsläge, som används av styrenheten för att möjliggöra förbikoppling av dörrkontakter (föröppning/omplaning).
• Retardationsavstånd, beroende på lyfthastigheten.
 På spelplattan visas ett "/\" blinkande meddelande: Flytta lyften upp till bottenvåningens läge. Styrenheten försätt ELGO i normalt läge. (inte möjligt tidigare eftersom ELGO skulle ligga på gränserna för att öppna OC och låsa kabinen).
På spelplattan visas ett "/\" blinkande meddelande: Flytta lyften upp till bottenvåningens läge. Styrenheten försätt ELGO i normalt läge. (inte möjligt tidigare eftersom ELGO skulle ligga på gränserna för att öppna OC och låsa kabinen).
På spelplattan visas ett "VÄNTA" blinkande meddelande i 10 sekunder, vänta tills det visas våning 0.
ELGO-enheten stoppar det akustiska pipet och led-LÄGET börjar blinka (1 blinkning per sekund).
Nu är ELGO-enheten operativ för säkerhetskontakter:
• Elektronisk säkerhetsutrustning (om den finns)
• Elektronisk OSG.
• Sista gränsbrytare.
• Inspektionsgränsbrytare hanteras ännu inte eftersom hissen är i tillfälligt läge.
Före normalt driftläge är det obligatoriskt att utföra en automatisk axelinlärning för att ställa in rätt stoppsträckor i uppåt- och nedåtriktad riktning för varje våning.
Automatisk inlärningsprocedur
9) – Hissen måste vara i tillfällig drift. Lägg hissen på bottenvåningen med hälften av maximal last.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Förvandla inspektionsväljaren till Normal
Hissen börjar röra sig automatiskt:
• Uppåtgående turer med retardation och stopp på varje våning.
• Nedåtgående resor med retardation och stannar vid varje våning.
När stugan kommer tillbaka till lägsta våningen är systemet redo att passera in till Normal service.
After automatic learning procedure in <Positioning>, Bildskärmskodare du kan ställa in:
• Retardationsavstånd i normal service för retardationskonfort
– R1S (Pag. 3) uppåtgående retardationsavstånd
– R1D (Pag. 2) nedåtgående retardationsavstånd
Dessa värden ställs automatiskt in efter automatisk inlärning enligt hissens hastighet (se lyfthastighet och retardationsavstånd).
• Stoppavstånd vid schaktinspektion
– I_LIM_S uppåtgående stoppsträcka före läget på översta våningen
– I_LIM_D nedåtgående stoppsträcka före bottenvåningsläge
I reducerat huvud/grop måste dessa värden beaktas enligt det förutlösta säkerhetssystemet.
• Stoppa avstånd i normal service
– N_LIM_S uppåtgående stoppsträcka efter läget på översta våningen
– N_LIM_D nedåtgående stoppsträcka efter bottenvåningsläge
Dessa värden ställs automatiskt in efter automatisk inlärning på ett avstånd som är lika med 30 mm från extrema golv (vid mindre avstånd från referenspunkter anses det vara mittpunkten mellan extrema golv och extrema referenspositioner).
• ELGO+eSGC-position före utlösaren
– TRIPS-avstånd från det övre referensläget där eSGC:s elektriska kommando tvingar kabinen att stanna (endast för reducerad huvudlyft).
– TRIPD-avstånd från botten Referensposition där eSGC elektriskt kommando tvingar kabinen att stanna (endast för reducerad gropinstallation)
Dessa värden är skrivskyddade värden och är endast större än 0 mm om ELGO är en del av säkerhetsförutlösningssystemet (togheter med elektrisk säkerhetsväxel / overspeed regulator).
Om det i installationen inte finns tillräckligt med utrymme (reducerat huvud) rekommenderas att manualen lär ut från utsidan av lyftaxeln (åtminstone de första 3 stegen): I detta fall kan du använda Inspektionsboxen inuti styrenheten och efter top of ar Inspection BOX.
För att starta proceduren måste hissen vara i tillfällig drift. Fram till slutet av manual teach proceduren är säkerhetskontakterna anslutna på säkerhetskedjan men är ännu inte operativa (Slutlig gränsbrytare, Inspektionsgränsbrytare, OSG, eSGC) eftersom ELGO inte känner till den verkliga positionen för axelns gränsvärden. Den enda kontrollen baserad på ELGO Device är Teach over speed (0,4 m/s), så om cabinspeed är högre än 0,4 m/s öppnar ELGO OC-kontakt (och stänger OC-kontakten efter att kabinen står stilla).
1) – Sätt hissen bilen i högsta läge (motvikt på buffertar).2) – Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att placera ELGO-enheten i teach-läge. På spelplattan visas ett VÄNTA blinkande meddelande (om problemproceduren avslutas med ett fel ELGO, se Felsökning).
ELGO-enheten slår på led-LÄGET och börjar ge akustisk feedback (ett pip varannan sekund). Denna akustiska signal kommer att finnas i hela den manuella undervisningsproceduren. På spelplattan visas ett "TOP" blinkande meddelande.
3) – Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in den högsta punkten i axeln i ELGO. Denna punkt kommer att vara referenspunkten för toppgränser (toppgränsbrytare, topp inspektionsgräns, TOP ETSL-kontroll, etc.).Den ELGO-enheten ger en lång akustisk feedback för att bekräfta att toppgränsdata har registrerats.
På spelplattan visas ett "Floor n" blinkande meddelande (n är golvet du ska spela in).
4) – Flytta kabinen upp till översta våningen.
Tryck samtidigt på upp- och nedknapparna i inspektionsboxen 3 gånger för att spela in golvläget i ELGO.
Den ELGO-enheten ger en kort akustisk feedback för att bekräfta att golvdata har registrerats.
På spelplattan visas ett "Floor n-1" blinkande meddelande (n-1 är nästa våning du ska spela in).
5) – Flytta kabinen nedåt till nästa våning.Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in golvläget i ELGO.
ELGO-enheten ger en kort akustisk feedback för att bekräfta att golvdata har registrerats.
6) – Upprepa föregående punkt tills den lägsta våningen har nåtts.
7) – Efter inspelning av den Nedre våningens position på spelplattan visas ett "BOTTOM" blinkande meddelande, flytta kabinen till axelns lägsta punkt (hytten på buffertarna).
Tryck samtidigt på upp- och nedknappen i inspektionsboxen 3 gånger för att spela in det lägsta läget i ELGO. Denna punkt är ursprunget till magnetbandet (0 mm visade) och kommer att vara referenspunkten för bottengränser (bottengränsbrytare, botteninspektionsgräns, botten ETSL-kontroll etc.).
ELGO-enheten ger en lång akustisk feedback för att bekräfta dataposten.
I det här ögonblicket registrerar styrenheten automatiskt:
• Placering av förvärvade golv;
• Dörrzonsläge, som används av styrenheten för att möjliggöra förbikoppling av dörrkontakter (föröppning/omplaning).
• Retardationsavstånd, beroende på lyfthastigheten.
På spelplattan visas ett "/\" blinkande meddelande: Flytta lyften upp till bottenvåningens läge. Styrenheten försätt ELGO i normalt läge. (inte möjligt tidigare eftersom ELGO skulle ligga på gränserna för att öppna OC och låsa kabinen).På spelplattan visas ett "VÄNTA" blinkande meddelande i 10 sekunder, vänta tills det visas våning 0.
ELGO-enheten stoppar det akustiska pipet och led-LÄGET börjar blinka (1 blinkning per sekund).
Nu är ELGO-enheten operativ för säkerhetskontakter:
• Elektronisk säkerhetsutrustning (om den finns)
• Elektronisk OSG.
• Sista gränsbrytare.
• Inspektionsgränsbrytare hanteras ännu inte eftersom hissen är i tillfälligt läge.
Före normalt driftläge är det obligatoriskt att utföra en automatisk axelinlärning för att ställa in rätt stoppsträckor i uppåt- och nedåtriktad riktning för varje våning.
Automatisk inlärningsprocedur
9) – Hissen måste vara i tillfällig drift. Lägg hissen på bottenvåningen med hälften av maximal last.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Förvandla inspektionsväljaren till Normal
Hissen börjar röra sig automatiskt:
• Uppåtgående turer med retardation och stopp på varje våning.
• Nedåtgående resor med retardation och stannar vid varje våning.
När stugan kommer tillbaka till lägsta våningen är systemet redo att passera in till Normal service.
After automatic learning procedure in <Positioning>, Bildskärmskodare du kan ställa in:
• Retardationsavstånd i normal service för retardationskonfort
– R1S (Pag. 3) uppåtgående retardationsavstånd
– R1D (Pag. 2) nedåtgående retardationsavstånd
Dessa värden ställs automatiskt in efter automatisk inlärning enligt hissens hastighet (se lyfthastighet och retardationsavstånd).
• Stoppavstånd vid schaktinspektion
– I_LIM_S uppåtgående stoppsträcka före läget på översta våningen
– I_LIM_D nedåtgående stoppsträcka före bottenvåningsläge
I reducerat huvud/grop måste dessa värden beaktas enligt det förutlösta säkerhetssystemet.
• Stoppa avstånd i normal service
– N_LIM_S uppåtgående stoppsträcka efter läget på översta våningen
– N_LIM_D nedåtgående stoppsträcka efter bottenvåningsläge
Dessa värden ställs automatiskt in efter automatisk inlärning på ett avstånd som är lika med 30 mm från extrema golv (vid mindre avstånd från referenspunkter anses det vara mittpunkten mellan extrema golv och extrema referenspositioner).
• ELGO+eSGC-position före utlösaren
– TRIPS-avstånd från det övre referensläget där eSGC:s elektriska kommando tvingar kabinen att stanna (endast för reducerad huvudlyft).
– TRIPD-avstånd från botten Referensposition där eSGC elektriskt kommando tvingar kabinen att stanna (endast för reducerad gropinstallation)
Dessa värden är skrivskyddade värden och är endast större än 0 mm om ELGO är en del av säkerhetsförutlösningssystemet (togheter med elektrisk säkerhetsväxel / overspeed regulator).
DMG-kodare eller motorkodare: Automatisk inlärningsprocedur för golv
Efter installationen och under tillfälligt driftläge utför styrenheten ett antal upp-/nedåtgående provkörningar (hög hastighet först, sedan låg hastighet med stopp vid golv) i syfte att lära sig den exakta golvpositioneringen.
Självlärande förfarande:
1) – Kontrollera att installationen är i läget "Tillfällig drift"
2) – Se till att kodaren spårar rätt körriktning (öka avståndet när du är uppåt, minska avståndet när du är nedåt); Ställ vid behov in parametern Positioneringssystem i menyn "positionering" från medurs till moturs (eller vice versa) och spara den nya inställningen.

3) – Kontrollera korrekt avläsning av ZP-ingång (dörrzon) (ZP-lysdioden på PLAYPAD-modulen måste lysas upp när den är i dörrzonen)
4) – Kontrollera korrekt avläsning av AGB/ AGH (retardationsgränsbrytare) ingångar (AGB / AGH måste vara öppna när de är i retardationsgränslägen)
5) – Se till att kabinen är på bottenvåningen (AGB öppen, ZP LED på)
6) – Ange menyn "Positionering", välj parametern Automatisk inställning och ange:
- På DMG-encodern: encoderns upplösning (64 eller 100 pulser beroende på encodermodell), sedan längden på golvmagneterna. (Dörrzonens längd). Bekräfta det totala antalet våningar och tryck sedan på "Ja" för att starta proceduren.
• På motorkodaren: kodarupplösningen, motorförhållandet, dragkraftsskivan och ropingen. Bekräfta det totala antalet våningar och tryck sedan på "Ja" för att starta proceduren.
7) – Ställ in kontrollpanelens väljare på NORMAL (om den finns), se annars till att säkerhetskedjan är stängd.
Systemet utför följande automatiska procedur:
• Rör sig uppåt tills signalen ZP på bottenvåningen är avaktiverad
• Flytta nedåt tills signalen ZP på bottenvåningen är aktiverad
• Flytta upp med hög hastighet och positionsdetektering för varje våning (bottenkanten av dörrzonsmagneter); Den exakta positionen för magnetens nederkant lagras i styrenhetens minne.
• När systemet når den övre retardationspunkten (AGH) växlar det till låg hastighet och när det når den övre golvdörrzonen (ZP) stannar det.
• Flytta ner med hög hastighet och positionsdetektering för varje våning (övre kanten av dörrzonsmagneter); Den exakta positionen för magnetens överkant lagras i styrenhetens minne.
• När systemet når den nedre retardationspunkten (AGB) swithes det till låg hastighet och när det når botten golvdörrzonen (ZP) stannar det.
• Flytta upp sakta ner och stanna vid varje våning (vid ZP-magnetnivå)
• Att sakta ner och stanna vid varje våning (på ZP-magnetnivå)
Efter den andra uppsättningen körningar (som slutar på den lägsta våningen) är installationen redo att gå in i SERVICE-läge.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
OBS:Självinlärningsproceduren måste utföras varje gång antingen AGB/ AGH-gränsbrytare och / eller dörrzonmagneter flyttas från sitt ursprungliga läge.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH avstånd räcker för lyfthastigheten. Är det möjligt att öka/minska retardationsavstånden i Normal service R1S och R1D utan att behöva upprepa automatisk inlärningsprocedur.
För AGB/AGH-positioner och retardationsavstånd bord enligt lyftens hastighet.
I system där de minsta erforderliga dimensionerna i axelns över- och underkant garanteras enligt kraven i föreskriften EN 81 är det möjligt att använda två parametrar för att stoppa hissen vid inspektion.
In <Positioning>, Bildskärmskodare
• I_LIM_S uppåtgående stoppsträcka före läget på översta våningen
• I_LIM_D nedåtgående stoppsträcka före bottenvåningsläge
Dessa stoppsträckor är giltiga för inspektion från axeln (är inte aktiva vid inspektion från maskinrummet) och kan användas för att undvika risken för att teknikern fastnar i hisschaktet.
Tänk på att dessa stopppositioner inte är säkerhetskontakter.
Självlärande förfarande:
1) – Kontrollera att installationen är i läget "Tillfällig drift"
2) – Se till att kodaren spårar rätt körriktning (öka avståndet när du är uppåt, minska avståndet när du är nedåt); Ställ vid behov in parametern Positioneringssystem i menyn "positionering" från medurs till moturs (eller vice versa) och spara den nya inställningen.
3) – Kontrollera korrekt avläsning av ZP-ingång (dörrzon) (ZP-lysdioden på PLAYPAD-modulen måste lysas upp när den är i dörrzonen)
4) – Kontrollera korrekt avläsning av AGB/ AGH (retardationsgränsbrytare) ingångar (AGB / AGH måste vara öppna när de är i retardationsgränslägen)
5) – Se till att kabinen är på bottenvåningen (AGB öppen, ZP LED på)
6) – Ange menyn "Positionering", välj parametern Automatisk inställning och ange:
- På DMG-encodern: encoderns upplösning (64 eller 100 pulser beroende på encodermodell), sedan längden på golvmagneterna. (Dörrzonens längd). Bekräfta det totala antalet våningar och tryck sedan på "Ja" för att starta proceduren.
• På motorkodaren: kodarupplösningen, motorförhållandet, dragkraftsskivan och ropingen. Bekräfta det totala antalet våningar och tryck sedan på "Ja" för att starta proceduren.
7) – Ställ in kontrollpanelens väljare på NORMAL (om den finns), se annars till att säkerhetskedjan är stängd.
Systemet utför följande automatiska procedur:
• Rör sig uppåt tills signalen ZP på bottenvåningen är avaktiverad
• Flytta nedåt tills signalen ZP på bottenvåningen är aktiverad
• Flytta upp med hög hastighet och positionsdetektering för varje våning (bottenkanten av dörrzonsmagneter); Den exakta positionen för magnetens nederkant lagras i styrenhetens minne.
• När systemet når den övre retardationspunkten (AGH) växlar det till låg hastighet och när det når den övre golvdörrzonen (ZP) stannar det.
• Flytta ner med hög hastighet och positionsdetektering för varje våning (övre kanten av dörrzonsmagneter); Den exakta positionen för magnetens överkant lagras i styrenhetens minne.
• När systemet når den nedre retardationspunkten (AGB) swithes det till låg hastighet och när det når botten golvdörrzonen (ZP) stannar det.
• Flytta upp sakta ner och stanna vid varje våning (vid ZP-magnetnivå)
• Att sakta ner och stanna vid varje våning (på ZP-magnetnivå)
Efter den andra uppsättningen körningar (som slutar på den lägsta våningen) är installationen redo att gå in i SERVICE-läge.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
OBS:Självinlärningsproceduren måste utföras varje gång antingen AGB/ AGH-gränsbrytare och / eller dörrzonmagneter flyttas från sitt ursprungliga läge.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH avstånd räcker för lyfthastigheten. Är det möjligt att öka/minska retardationsavstånden i Normal service R1S och R1D utan att behöva upprepa automatisk inlärningsprocedur.
För AGB/AGH-positioner och retardationsavstånd bord enligt lyftens hastighet.
I system där de minsta erforderliga dimensionerna i axelns över- och underkant garanteras enligt kraven i föreskriften EN 81 är det möjligt att använda två parametrar för att stoppa hissen vid inspektion.
In <Positioning>, Bildskärmskodare
• I_LIM_S uppåtgående stoppsträcka före läget på översta våningen
• I_LIM_D nedåtgående stoppsträcka före bottenvåningsläge
Dessa stoppsträckor är giltiga för inspektion från axeln (är inte aktiva vid inspektion från maskinrummet) och kan användas för att undvika risken för att teknikern fastnar i hisschaktet.
Tänk på att dessa stopppositioner inte är säkerhetskontakter.
Självstudiekurs för video
Hur man konfigurerar ELGO-positioneringssystemet med en styrenhet Pitagora 4.0






