
Procedimento de aprendizagem de pavimentos
Se o Controlador estiver equipado com Codificador Absoluto ou Codificador DMG ou Codificador Motor, é possível tirar partido da função de aprendizagem da posição no chão, o que permite uma configuração mais rápida do sistema e uma afinação fina. O procedimento é diferente de acordo com o tipo de codificador, conforme descrito nas secções seguintes:
ELGO LIMAX 33CP: Procedimento de aprendizagem
Procedimento de aprendizagem manual
Se na instalação não houver espaço suficiente (Cabeça Reduzida) é recomendado fazer o Manual Ensinar do exterior do poço do elevador (pelo menos os 3 primeiros passos): Neste caso pode utilizar a CAIXA de Inspecção dentro do controlador e depois a CAIXA de Inspecção do topo do ar.
 O procedimento deve ser feito antes de colocar o sistema no modo Normal.
O procedimento deve ser feito antes de colocar o sistema no modo Normal.
Para iniciar o procedimento, o elevador deve estar em operação temporária. Até ao fim do Procedimento de Ensino Manual os contactos de Segurança estão ligados na cadeia de segurança mas ainda não estão operacionais (interruptor de fim de curso final, interruptor de fim de curso de inspecção, OSG, eSGC) porque o ELGO não conhece a posição real dos pontos de limite do poço. O único controlo baseado no Dispositivo ELGO é Ensinar sobre a velocidade (0,4 m/s), portanto, se a velocidade da cabina for superior a 0,4 m/s, o ELGO abre o contacto OC (e fecha o contacto OC depois de a Cabine estar estacionária).
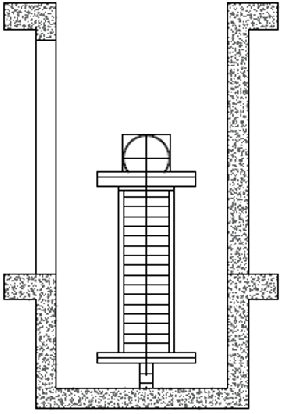 1) - Colocar o elevador carro na posição mais alta (contrapeso em amortecedores).
1) - Colocar o elevador carro na posição mais alta (contrapeso em amortecedores).
2) - Pressione simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para colocar o dispositivo ELGO no modo Teach. No playpad está a mostrar uma mensagem de ESPERA piscando (em caso de procedimento de problema, desiste com um ELGO de Falha, ver Resolução de Problemas).
O dispositivo ELGO liga o led MODE e começa a dar feedback acústico (um sinal sonoro a cada 2 segundos). Este sinal acústico estará presente durante todo o Procedimento de Ensino Manual. No playpad está a mostrar uma mensagem "TOP" piscando.
 3) – Premir de novo simultaneamente 3 vezes o botão UP e DOWN da CAIXA de Inspecção para registar dentro do ELGO o ponto mais alto do Eixo. Este ponto será o ponto de referência para os limites superiores (interruptor de limite superior, limite de inspecção superior, controlo TOP ETSL, etc.).
3) – Premir de novo simultaneamente 3 vezes o botão UP e DOWN da CAIXA de Inspecção para registar dentro do ELGO o ponto mais alto do Eixo. Este ponto será o ponto de referência para os limites superiores (interruptor de limite superior, limite de inspecção superior, controlo TOP ETSL, etc.).
O O dispositivo ELGO dá um longo feedback acústico para confirmar que os dados do limite superior foram registados.
No playpad está a mostrar uma mensagem "Floor n" piscando (n é o piso que vai gravar).
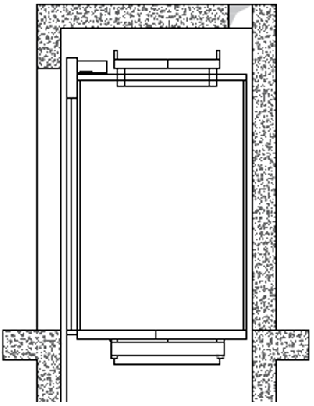
4) – Deslocar a Cabine para o andar mais alto.
Pressionar simultaneamente os botões UP e DOWN da CAIXA de Inspecção 3 vezes para registar no interior do ELGO a posição do chão.
O O dispositivo ELGO dá um pequeno feedback acústico para confirmar que os dados do piso foram registados.
No playpad aparece uma mensagem "Floor n-1" piscando (n-1 é o próximo andar que vai gravar).
 5) – Descer a Cabine até ao próximo andar.
5) – Descer a Cabine até ao próximo andar.
Prima simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para registar no interior do ELGO a posição do chão.
O dispositivo ELGO dá um breve feedback acústico para confirmar que os dados do piso foram registados.
6) – Repetir o ponto anterior até ser atingido o piso mais baixo.
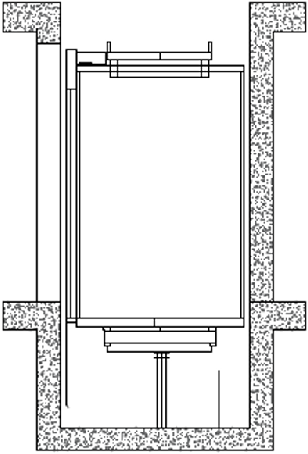
7) – Após gravação de o Posição do piso inferior no playpad está a mostrar uma mensagem "BOTTOM" piscandoMova a cabina para o ponto mais baixo do eixo (cabina sobre os amortecedores).
Prima simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para registar dentro do ELGO a posição mais baixa. Este ponto é a origem da banda magnética (0 mm mostrado) e será o ponto de referência para os limites inferiores (Interruptor de limite inferior, Limite de inspecção inferior, Controlo inferior ETSL, etc.).
O dispositivo ELGO dá um longo feedback acústico para confirmar o registo de dados.
Neste momento, o controlador regista automaticamente:
- Posição dos pisos adquiridos;
- Posição da zona da porta, utilizada pelo controlador para permitir o desvio dos contactos da porta (pré-abertura / re-nivelamento).
- Distância de desaceleração, de acordo com a velocidade do elevador.
 No playpad está a mostrar uma mensagem "/\" piscando: Mova o elevador para a posição do piso inferior. O Controlador irá colocar o ELGO no Modo Normal. (não possível antes porque o ELGO estaria nos limites abrindo o CO e trancando a cabina).
No playpad está a mostrar uma mensagem "/\" piscando: Mova o elevador para a posição do piso inferior. O Controlador irá colocar o ELGO no Modo Normal. (não possível antes porque o ELGO estaria nos limites abrindo o CO e trancando a cabina).
No playpad está a mostrar uma mensagem "ESPERA" piscando durante 10 segundos, aguarde até ser mostrado o Piso 0.
O dispositivo ELGO pára o sinal sonoro e o led MODE começa a piscar (1 piscar por segundo).
Agora o Dispositivo ELGO está operacional para contactos de segurança:
- Electronic Safety Gear (se presente)
- Electronic OSG.
- Interruptores de limite final.
- Os interruptores de limite de inspecção ainda não são geridos porque o elevador está em modo Temporário.
Antes do modo de funcionamento normal, é obrigatório executar uma aprendizagem automática do Eixo para definir as distâncias de paragem correctas no sentido ascendente e descendente para cada andar.
Procedimento de aprendizagem automática
9) - O elevador deve estar em funcionamento temporário. Colocar o elevador no piso inferior com metade da carga máxima.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Tornar o Selector de Inspecção em Normal
O elevador começa a mover-se automaticamente:
- Viagens para cima com desaceleração e paragem em cada andar.
- Viagens para baixo com desaceleração e paragens em cada andar.
Quando a Cabine regressa ao piso mais baixo, o sistema está pronto a passar para o serviço Normal.
After automatic learning procedure in <Positioning>, Codificador de monitor que pode definir:
- Distâncias de desaceleração em serviço normal para conforto de desaceleração
- R1S (Pag. 3) distância de desaceleração ascendente
- R1D (Pag. 2) distância de desaceleração para baixo
Estes valores são automaticamente definidos após a aprendizagem automática de acordo com a velocidade do elevador (ver velocidade de elevação e distância de desaceleração).
- Distâncias de paragem na Inspecção do Eixo
- I_LIM_S distância de paragem ascendente antes da posição do piso superior
- I_LIM_D distância de paragem para baixo antes da posição do piso inferior
Em Reduced Head/Pit estes valores devem ser considerados de acordo com o sistema de segurança Pre-Triggered.
- Distâncias de paragem em serviço normal
- N_LIM_S distância de paragem ascendente após a posição do piso superior
- N_LIM_D distância de paragem para baixo após a posição do piso inferior
Estes valores são automaticamente definidos após aprendizagem automática a uma distância igual a 30 mm dos pisos extremos (no caso de menor distância dos pontos de referência é considerado o ponto médio entre os pisos extremos e as posições de referência extremas).
- ELGO+eSGC posição de pré-acionamento
- Distância TRIPS da posição de referência superior onde o comando eléctrico eSGC força a cabina a parar (apenas para o elevador de Cabeça Reduzida).
- TRIPD distância do fundo Posição de referência onde o comando eléctrico eSGC força a cabina a parar (apenas para instalação em fosso reduzido)
Estes valores são apenas valores de leitura e são superiores a 0 mm apenas se o ELGO fizer parte do sistema de segurança pré.-Triggered (em conjunto com o equipamento de segurança eléctrico / Governador de sobrevelocidade).
Se na instalação não houver espaço suficiente (Cabeça Reduzida) é recomendado fazer o Manual Ensinar do exterior do poço do elevador (pelo menos os 3 primeiros passos): Neste caso pode utilizar a CAIXA de Inspecção dentro do controlador e depois a CAIXA de Inspecção do topo do ar.
Para iniciar o procedimento, o elevador deve estar em operação temporária. Até ao fim do Procedimento de Ensino Manual os contactos de Segurança estão ligados na cadeia de segurança mas ainda não estão operacionais (interruptor de fim de curso final, interruptor de fim de curso de inspecção, OSG, eSGC) porque o ELGO não conhece a posição real dos pontos de limite do poço. O único controlo baseado no Dispositivo ELGO é Ensinar sobre a velocidade (0,4 m/s), portanto, se a velocidade da cabina for superior a 0,4 m/s, o ELGO abre o contacto OC (e fecha o contacto OC depois de a Cabine estar estacionária).
1) - Colocar o elevador carro na posição mais alta (contrapeso em amortecedores).2) - Pressione simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para colocar o dispositivo ELGO no modo Teach. No playpad está a mostrar uma mensagem de ESPERA piscando (em caso de procedimento de problema, desiste com um ELGO de Falha, ver Resolução de Problemas).
O dispositivo ELGO liga o led MODE e começa a dar feedback acústico (um sinal sonoro a cada 2 segundos). Este sinal acústico estará presente durante todo o Procedimento de Ensino Manual. No playpad está a mostrar uma mensagem "TOP" piscando.
3) – Premir de novo simultaneamente 3 vezes o botão UP e DOWN da CAIXA de Inspecção para registar dentro do ELGO o ponto mais alto do Eixo. Este ponto será o ponto de referência para os limites superiores (interruptor de limite superior, limite de inspecção superior, controlo TOP ETSL, etc.).O O dispositivo ELGO dá um longo feedback acústico para confirmar que os dados do limite superior foram registados.
No playpad está a mostrar uma mensagem "Floor n" piscando (n é o piso que vai gravar).
4) – Deslocar a Cabine para o andar mais alto.
Pressionar simultaneamente os botões UP e DOWN da CAIXA de Inspecção 3 vezes para registar no interior do ELGO a posição do chão.
O O dispositivo ELGO dá um pequeno feedback acústico para confirmar que os dados do piso foram registados.
No playpad aparece uma mensagem "Floor n-1" piscando (n-1 é o próximo andar que vai gravar).
5) – Descer a Cabine até ao próximo andar.Prima simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para registar no interior do ELGO a posição do chão.
O dispositivo ELGO dá um breve feedback acústico para confirmar que os dados do piso foram registados.
6) – Repetir o ponto anterior até ser atingido o piso mais baixo.
7) – Após gravação de o Posição do piso inferior no playpad está a mostrar uma mensagem "BOTTOM" piscandoMova a cabina para o ponto mais baixo do eixo (cabina sobre os amortecedores).
Prima simultaneamente o botão UP e DOWN da CAIXA de Inspecção 3 vezes para registar dentro do ELGO a posição mais baixa. Este ponto é a origem da banda magnética (0 mm mostrado) e será o ponto de referência para os limites inferiores (Interruptor de limite inferior, Limite de inspecção inferior, Controlo inferior ETSL, etc.).
O dispositivo ELGO dá um longo feedback acústico para confirmar o registo de dados.
Neste momento, o controlador regista automaticamente:
- Posição dos pisos adquiridos;
- Posição da zona da porta, utilizada pelo controlador para permitir o desvio dos contactos da porta (pré-abertura / re-nivelamento).
- Distância de desaceleração, de acordo com a velocidade do elevador.
No playpad está a mostrar uma mensagem "/\" piscando: Mova o elevador para a posição do piso inferior. O Controlador irá colocar o ELGO no Modo Normal. (não possível antes porque o ELGO estaria nos limites abrindo o CO e trancando a cabina).No playpad está a mostrar uma mensagem "ESPERA" piscando durante 10 segundos, aguarde até ser mostrado o Piso 0.
O dispositivo ELGO pára o sinal sonoro e o led MODE começa a piscar (1 piscar por segundo).
Agora o Dispositivo ELGO está operacional para contactos de segurança:
- Electronic Safety Gear (se presente)
- Electronic OSG.
- Interruptores de limite final.
- Os interruptores de limite de inspecção ainda não são geridos porque o elevador está em modo Temporário.
Antes do modo de funcionamento normal, é obrigatório executar uma aprendizagem automática do Eixo para definir as distâncias de paragem correctas no sentido ascendente e descendente para cada andar.
Procedimento de aprendizagem automática
9) - O elevador deve estar em funcionamento temporário. Colocar o elevador no piso inferior com metade da carga máxima.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Tornar o Selector de Inspecção em Normal
O elevador começa a mover-se automaticamente:
- Viagens para cima com desaceleração e paragem em cada andar.
- Viagens para baixo com desaceleração e paragens em cada andar.
Quando a Cabine regressa ao piso mais baixo, o sistema está pronto a passar para o serviço Normal.
After automatic learning procedure in <Positioning>, Codificador de monitor que pode definir:
- Distâncias de desaceleração em serviço normal para conforto de desaceleração
- R1S (Pag. 3) distância de desaceleração ascendente
- R1D (Pag. 2) distância de desaceleração para baixo
Estes valores são automaticamente definidos após a aprendizagem automática de acordo com a velocidade do elevador (ver velocidade de elevação e distância de desaceleração).
- Distâncias de paragem na Inspecção do Eixo
- I_LIM_S distância de paragem ascendente antes da posição do piso superior
- I_LIM_D distância de paragem para baixo antes da posição do piso inferior
Em Reduced Head/Pit estes valores devem ser considerados de acordo com o sistema de segurança Pre-Triggered.
- Distâncias de paragem em serviço normal
- N_LIM_S distância de paragem ascendente após a posição do piso superior
- N_LIM_D distância de paragem para baixo após a posição do piso inferior
Estes valores são automaticamente definidos após aprendizagem automática a uma distância igual a 30 mm dos pisos extremos (no caso de menor distância dos pontos de referência é considerado o ponto médio entre os pisos extremos e as posições de referência extremas).
- ELGO+eSGC posição de pré-acionamento
- Distância TRIPS da posição de referência superior onde o comando eléctrico eSGC força a cabina a parar (apenas para o elevador de Cabeça Reduzida).
- TRIPD distância do fundo Posição de referência onde o comando eléctrico eSGC força a cabina a parar (apenas para instalação em fosso reduzido)
Estes valores são apenas valores de leitura e são superiores a 0 mm apenas se o ELGO fizer parte do sistema de segurança pré.-Triggered (em conjunto com o equipamento de segurança eléctrico / Governador de sobrevelocidade).
Codificador DMG ou Codificador Motor: Procedimento de aprendizagem automática de pavimentos
Após a instalação e durante o modo de funcionamento TEMPORÁRIO, o controlador realiza uma série de testes ascendentes/ descendentes (primeiro a alta velocidade, depois a baixa velocidade com paragens nos pisos) com o objectivo de aprender o posicionamento exacto do piso.
Procedimento de auto-aprendizagem:
1) – Certifique-se de que a instalação está no modo "Operação Temporária
2) – Certifique-se de que o codificador traça a direcção correcta de marcha, (aumentando a distância quando ascendente, diminuindo a distância quando descendente); se necessário, no menu "posicionamento" defina o parâmetro Sistema de posicionamento desde o sentido horário até ao sentido anti-horário (ou vice-versa) e guarde a nova configuração.

3) – Verificar a leitura correcta da entrada ZP (zona da porta) (o LED ZP no módulo PLAYPAD deve estar aceso quando na zona da porta)
4) – Verificar a leitura correcta das entradas AGB/AGH (interruptores de limite de desaceleração) (os AGB/AGH devem estar abertos quando em posições de limite de desaceleração)
5) – Certifique-se de que a cabina está no piso inferior (AGB aberto, ZP LED ligado)
6) – Entrar no menu "Posicionamento", seleccionar o parâmetro Definição automática e entrar:
- No codificador DMG: a resolução do codificador (64 ou 100 impulsos segundo o modelo do codificador), depois o comprimento dos ímanes de solo. (Comprimento da zona da porta). Confirmar o número total de pisos e, em seguida, premir "Sim" para iniciar o procedimento.
- No codificador do motor: a resolução do codificador, a relação do motor, a polia de tracção, e o cordão. Confirmar o número total de pisos, depois premir "Sim" para iniciar o procedimento.
7) – Colocar o selector do painel de inspecção na NORMAL (se presente), caso contrário certificar-se de que a cadeia de segurança está fechada.
O sistema executa o seguinte procedimento automático:
- Subindo, até o sinal ZP do piso inferior ser desactivado
- Descimento, até o sinal ZP do piso inferior ser activado
- Subindo a alta velocidade e detecção de posição para cada piso (extremidade inferior dos ímanes da zona da porta); a posição exacta da extremidade inferior do íman é armazenada na memória do controlador.
- Ao atingir o ponto de desaceleração superior (AGH) o sistema muda para a baixa velocidade e ao atingir a zona da porta do andar superior (ZP) pára.
- Descimento a alta velocidade e detecção de posição para cada piso (borda superior dos ímanes da zona da porta); a posição exacta da borda superior do íman é armazenada na memória do controlador.
- Ao atingir o ponto de desaceleração inferior (AGB) o sistema gira a baixa velocidade e ao atingir a zona da porta do piso inferior (ZP) pára.
- Subir mais devagar e parar em cada andar (ao nível do íman ZP)
- Deslocando-se para baixo abrandando e parando em cada andar (ao nível do íman ZP)
Após o segundo conjunto de execuções (que termina no piso mais baixo), a instalação está pronta para entrar em modo SERVIÇO.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTA: o procedimento de auto-aprendizagem deve ser realizado sempre que os interruptores de limite AGB/AGH e/ou ímanes de zona de porta são deslocados da sua posição original.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH As distâncias são suficientes para a velocidade do elevador. É possível aumentar/diminuir as distâncias de desaceleração no serviço Normal R1S e R1D sem ser necessário repetir o Procedimento de aprendizagem automático.
Para posições AGB/AGH e utilização de distâncias de desaceleração tabela de acordo com a velocidade do elevador.
Em sistemas em que as dimensões mínimas exigidas na parte superior e inferior do poço são garantidas de acordo com os requisitos da norma EN 81, é possível utilizar dois parâmetros para parar o elevador em Inspecção.
In <Positioning>, Codificador de monitor
- I_LIM_S distância de paragem ascendente antes da posição do piso superior
- I_LIM_D distância de paragem para baixo antes da posição do piso inferior
Estas distâncias de paragem são válidas para a Inspecção a partir do Eixo (não estão activas em caso de Inspecção a partir da Sala de Máquinas) e podem ser utilizadas para evitar o risco de o técnico ficar preso no interior do eixo do elevador.
Tenha em mente que estas posições de paragem não são contactos de segurança.
Procedimento de auto-aprendizagem:
1) – Certifique-se de que a instalação está no modo "Operação Temporária
2) – Certifique-se de que o codificador traça a direcção correcta de marcha, (aumentando a distância quando ascendente, diminuindo a distância quando descendente); se necessário, no menu "posicionamento" defina o parâmetro Sistema de posicionamento desde o sentido horário até ao sentido anti-horário (ou vice-versa) e guarde a nova configuração.
3) – Verificar a leitura correcta da entrada ZP (zona da porta) (o LED ZP no módulo PLAYPAD deve estar aceso quando na zona da porta)
4) – Verificar a leitura correcta das entradas AGB/AGH (interruptores de limite de desaceleração) (os AGB/AGH devem estar abertos quando em posições de limite de desaceleração)
5) – Certifique-se de que a cabina está no piso inferior (AGB aberto, ZP LED ligado)
6) – Entrar no menu "Posicionamento", seleccionar o parâmetro Definição automática e entrar:
- No codificador DMG: a resolução do codificador (64 ou 100 impulsos segundo o modelo do codificador), depois o comprimento dos ímanes de solo. (Comprimento da zona da porta). Confirmar o número total de pisos e, em seguida, premir "Sim" para iniciar o procedimento.
- No codificador do motor: a resolução do codificador, a relação do motor, a polia de tracção, e o cordão. Confirmar o número total de pisos, depois premir "Sim" para iniciar o procedimento.
7) – Colocar o selector do painel de inspecção na NORMAL (se presente), caso contrário certificar-se de que a cadeia de segurança está fechada.
O sistema executa o seguinte procedimento automático:
- Subindo, até o sinal ZP do piso inferior ser desactivado
- Descimento, até o sinal ZP do piso inferior ser activado
- Subindo a alta velocidade e detecção de posição para cada piso (extremidade inferior dos ímanes da zona da porta); a posição exacta da extremidade inferior do íman é armazenada na memória do controlador.
- Ao atingir o ponto de desaceleração superior (AGH) o sistema muda para a baixa velocidade e ao atingir a zona da porta do andar superior (ZP) pára.
- Descimento a alta velocidade e detecção de posição para cada piso (borda superior dos ímanes da zona da porta); a posição exacta da borda superior do íman é armazenada na memória do controlador.
- Ao atingir o ponto de desaceleração inferior (AGB) o sistema gira a baixa velocidade e ao atingir a zona da porta do piso inferior (ZP) pára.
- Subir mais devagar e parar em cada andar (ao nível do íman ZP)
- Deslocando-se para baixo abrandando e parando em cada andar (ao nível do íman ZP)
Após o segundo conjunto de execuções (que termina no piso mais baixo), a instalação está pronta para entrar em modo SERVIÇO.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTA: o procedimento de auto-aprendizagem deve ser realizado sempre que os interruptores de limite AGB/AGH e/ou ímanes de zona de porta são deslocados da sua posição original.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH As distâncias são suficientes para a velocidade do elevador. É possível aumentar/diminuir as distâncias de desaceleração no serviço Normal R1S e R1D sem ser necessário repetir o Procedimento de aprendizagem automático.
Para posições AGB/AGH e utilização de distâncias de desaceleração tabela de acordo com a velocidade do elevador.
Em sistemas em que as dimensões mínimas exigidas na parte superior e inferior do poço são garantidas de acordo com os requisitos da norma EN 81, é possível utilizar dois parâmetros para parar o elevador em Inspecção.
In <Positioning>, Codificador de monitor
- I_LIM_S distância de paragem ascendente antes da posição do piso superior
- I_LIM_D distância de paragem para baixo antes da posição do piso inferior
Estas distâncias de paragem são válidas para a Inspecção a partir do Eixo (não estão activas em caso de Inspecção a partir da Sala de Máquinas) e podem ser utilizadas para evitar o risco de o técnico ficar preso no interior do eixo do elevador.
Tenha em mente que estas posições de paragem não são contactos de segurança.
Tutorial de Vídeo
Como configurar o sistema de posicionamento ELGO com um controlador Pitagora 4.0






