
Lattian oppimismenettely
Jos ohjain on varustettu Absolute Encoder- tai DMG Encoder- tai Motor Encoder -ohjaimella, on mahdollista hyödyntää lattia-asennon oppimisominaisuutta, mikä mahdollistaa nopeamman järjestelmän kokoonpanon ja hienosäädön. Menettely on erilainen kooderin tyypin mukaan seuraavissa osissa kuvatulla tavalla:
ELGO LIMAX 33CP: Oppimismenettely
Manuaalinen oppimismenettely
Jos asennuksessa ei ole tarpeeksi välystä (alennettu pää), on suositeltavaa tehdä Manuaalinen opetus hissiakselin ulkopuolelta (vähintään ensimmäiset 3 vaihetta): Tässä tapauksessa voit käyttää tarkastuslaatikkoa ohjaimen sisällä ja ar-tarkastuslaatikon yläosan jälkeen.
 Menettely on tehtävä ennen järjestelmän asettamista normaalitilaan.
Menettely on tehtävä ennen järjestelmän asettamista normaalitilaan.
Menettelyn aloittamiseksi hissin on oltava tilapäisesti käytössä. Manuaalisen opetusmenettelyn loppuun asti turvakoskettimet on kytketty turvaketjuun, mutta ne eivät ole vielä toiminnassa (lopullinen rajakytkin, tarkastusrajakytkin, OSG, eSGC), koska ELGO ei tiedä akselin rajapisteiden todellista sijaintia. Ainoa ELGO-laitteeseen perustuva ohjaus on Opeta ylinopeus (0,4 m/s), joten jos matkustamonopeus on yli 0,4 m/s, ELGO avaa OC-koskettimen (ja sulkee OC-koskettimen, kun matkustamo on paikallaan).
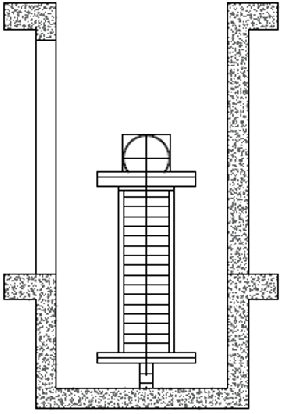 1) – Laita hissi korkeimmassa asennossa (vastapaino puskureihin).
1) – Laita hissi korkeimmassa asennossa (vastapaino puskureihin).
2) – Aseta ELGO-laite opetustilaan painamalla samanaikaisesti Tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa. Playpadissa näkyy ODOTTA-vilkkuva viesti (jos ongelmatoiminto sulkeutuu vian ELGO-toiminnon kanssa, katso Vianmääritys).
ELGO-laite kytkee led-TILAN päälle ja alkaa antaa akustista palautetta (yksi äänimerkki 2 sekunnin välein). Tämä akustinen signaali on läsnä koko manuaalisen opetusmenettelyn ajan. Playpadissa näkyy "TOP" vilkkuva viesti.
 3) – Paina tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO:n sisään akselin korkeimman pisteen. Tämä kohta on ylärajojen vertailupiste (ylärajakytkin, ylätarkastusraja, TOP ETSL -ohjaus jne.).
3) – Paina tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO:n sisään akselin korkeimman pisteen. Tämä kohta on ylärajojen vertailupiste (ylärajakytkin, ylätarkastusraja, TOP ETSL -ohjaus jne.).
Sitä ELGO-laite antaa pitkän akustisen palautteen vahvistaakseen, että ylärajan tiedot on tallennettu.
Leikkikentällä näkyy "Floor n" vilkkuva viesti (n on lattia, jonka aiot tallentaa).
4) – Siirrä mökki ylimpään kerrokseen.
Paina samanaikaisesti tarkastuslaatikon YLÖS- ja ALAS-painikkeita 3 kertaa tallentaaksesi ELGO-lattia-asennon sisään.
Sitä ELGO-laite antaa lyhyen akustisen palautteen vahvistaakseen, että lattiatiedot on tallennettu.
Leikkikentällä näkyy "Floor n-1" vilkkuva viesti (n-1 on seuraava kerros, jonka aiot tallentaa).
 5) – Siirrä hyttiä alaspäin seuraavaan kerrokseen asti.
5) – Siirrä hyttiä alaspäin seuraavaan kerrokseen asti.
Paina samanaikaisesti tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO-lattia-asennon sisään.
ELGO-laite antaa lyhyen akustisen palautteen vahvistaakseen, että lattiatiedot on tallennettu.
6) – Toista edellinen piste, kunnes alin kerros on saavutettu.
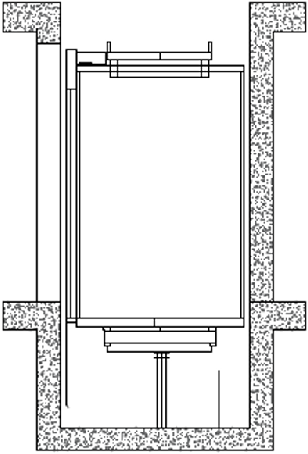
7) – Kun sitä Alakerran sijainti peliohjaimessa näkyy "BOTTOM" vilkkuva viesti, siirrä hytti akselin alimpaan kohtaan (puskureiden hytti).
Paina samanaikaisesti Inspection BOX -ruudun YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO:n sisään alimman asennon. Tämä kohta on magneettinauhan alkuperä (0 mm kuvassa) ja on pohjarajojen vertailupiste (alarajakytkin, pohjatarkastusraja, ala-ETSL-ohjaus jne.).
ELGO-laite antaa pitkän akustisen palautteen tietojen tallentamisen vahvistamiseksi.
Tällä hetkellä ohjain tallentaa automaattisesti:
• Hankittujen lattioiden sijainti;
• Ovialueen sijainti, jota ohjain käyttää ovikoskettimien ohittamiseen (avaamista /uudelleentasaustaukoa edeltävä).
• Hidastusetäisyys nostonopeuden mukaan.
 Leikkikentällä näkyy vilkkuva viesti: Siirrä nosto ylös alakerran asentoon. Ohjain asettaa ELGO:n normaalitilaan. (ei ole mahdollista aiemmin, koska ELGO olisi rajoilla avaamassa OC: tä ja lukitsemalla matkustamon).
Leikkikentällä näkyy vilkkuva viesti: Siirrä nosto ylös alakerran asentoon. Ohjain asettaa ELGO:n normaalitilaan. (ei ole mahdollista aiemmin, koska ELGO olisi rajoilla avaamassa OC: tä ja lukitsemalla matkustamon).
Playpadissa näkyy "ODOTA" vilkkuva viesti 10 sekunnin ajan, odota, kunnes se näkyy kerroksessa 0.
ELGO-laite pysäyttää akustisen äänimerkin ja led-TILA alkaa vilkkua (1 vilkkuu sekunnissa).
Nyt ELGO-laite toimii turvakoskettimissa:
• Elektroniset turvavarusteet (jos sellainen on)
• Elektroninen osg.
• Lopulliset rajakytkimet.
• Tarkastusrajakytkimiä ei vielä hallita, koska hissi on tilapäistilassa.
Ennen normaalia toimintatilaa on suoritettava automaattinen akselioppiminen oikeiden pysäytysmatkojen asettamiseksi ylös- ja alaspäin -suuntaan kullekin kerrolle.
Automaattinen oppimismenettely
9) – Hissin on oltava tilapäisesti käytössä. Aseta hissi pohjakerrokseen, jossa on puolet maksimikuormituksesta.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Käännä tarkastusvalitsin normaaliksi
Hissi alkaa liikkua automaattisesti:
• Ylös matkoja hidastuen ja pysähdy jokaisessa kerroksessa.
• Alaspäin suuntautuvat retket hidastuvuuksien kanssa ja pysähtyvät jokaisessa kerroksessa.
Kun mökki palaa alimpaan kerrokseen, järjestelmä on valmis kulkemaan normaaliin palveluun.
After automatic learning procedure in <Positioning>, Näytön kooderi voit asettaa:
• Hidastusetäisyydet normaalissa käytössä hidastusjuonen
– R1S (Pag. 3) ylöspäin hidastuvuusetäisyys
– R1D (Pag. 2) hidastuvuusetäisyys alaspäin
Nämä arvot asetetaan automaattisesti automaattisen oppimisen jälkeen hissin nopeuden mukaan (ks. nostonopeus ja hidastuvuusetäisyys).
• Pysähdysetäisyydet Shaft's Inspectionissa
– I_LIM_S ylöspäin pysähtyvä etäisyys ennen ylimmän kerroksen asentoa
– I_LIM_D alaspäin ennen alakerroksen asentoa
Kavennetussa päässä/kuopassa nämä arvot on otettava huomioon esikäynnistyneessä turvajärjestelmässä.
• Pysähdysmatkat normaalissa käytössä
– N_LIM_S ylöspäin pysähtyvä etäisyys ylimmän kerroksen asennon jälkeen
– N_LIM_D alaspäin pysäytysetäisyys alakerroksen asennon jälkeen
Nämä arvot asetetaan automaattisesti automaattisen oppimisen jälkeen etäisyydellä, joka on 30 mm äärimmäisistä kerroksista (jos etäisyys vertailupisteistä on pienempi, sitä pidetään keskipisteenä äärimmäisten kerrosten ja äärimmäisten vertailuasentojen välillä).
• ELGO+eSGC esikäynnisinasento
– TRIPS-etäisyys ylävertailuasennosta, jossa eSGC-sähkökomento pakottaa matkustamon pysähtymään (vain pienennetyssä pään nostossa).
– TRIPD-etäisyys alhaalta Vertailuasento, jossa eSGC-sähköinen komento pakottaa matkustamon pysähtymään (vain alennetun kuopan asennuksessa)
Nämä arvot ovat vain luku -arvoja ja ovat yli 0 mm vain, jos ELGO on osa turvajärjestelmää esikäynnistettyä järjestelmää (togheter, jossa on sähköinen turvavaruste / ylisuuri säädin).
Jos asennuksessa ei ole tarpeeksi välystä (alennettu pää), on suositeltavaa tehdä Manuaalinen opetus hissiakselin ulkopuolelta (vähintään ensimmäiset 3 vaihetta): Tässä tapauksessa voit käyttää tarkastuslaatikkoa ohjaimen sisällä ja ar-tarkastuslaatikon yläosan jälkeen.
Menettelyn aloittamiseksi hissin on oltava tilapäisesti käytössä. Manuaalisen opetusmenettelyn loppuun asti turvakoskettimet on kytketty turvaketjuun, mutta ne eivät ole vielä toiminnassa (lopullinen rajakytkin, tarkastusrajakytkin, OSG, eSGC), koska ELGO ei tiedä akselin rajapisteiden todellista sijaintia. Ainoa ELGO-laitteeseen perustuva ohjaus on Opeta ylinopeus (0,4 m/s), joten jos matkustamonopeus on yli 0,4 m/s, ELGO avaa OC-koskettimen (ja sulkee OC-koskettimen, kun matkustamo on paikallaan).
1) – Laita hissi korkeimmassa asennossa (vastapaino puskureihin).2) – Aseta ELGO-laite opetustilaan painamalla samanaikaisesti Tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa. Playpadissa näkyy ODOTTA-vilkkuva viesti (jos ongelmatoiminto sulkeutuu vian ELGO-toiminnon kanssa, katso Vianmääritys).
ELGO-laite kytkee led-TILAN päälle ja alkaa antaa akustista palautetta (yksi äänimerkki 2 sekunnin välein). Tämä akustinen signaali on läsnä koko manuaalisen opetusmenettelyn ajan. Playpadissa näkyy "TOP" vilkkuva viesti.
3) – Paina tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO:n sisään akselin korkeimman pisteen. Tämä kohta on ylärajojen vertailupiste (ylärajakytkin, ylätarkastusraja, TOP ETSL -ohjaus jne.).Sitä ELGO-laite antaa pitkän akustisen palautteen vahvistaakseen, että ylärajan tiedot on tallennettu.
Leikkikentällä näkyy "Floor n" vilkkuva viesti (n on lattia, jonka aiot tallentaa).
4) – Siirrä mökki ylimpään kerrokseen.
Paina samanaikaisesti tarkastuslaatikon YLÖS- ja ALAS-painikkeita 3 kertaa tallentaaksesi ELGO-lattia-asennon sisään.
Sitä ELGO-laite antaa lyhyen akustisen palautteen vahvistaakseen, että lattiatiedot on tallennettu.
Leikkikentällä näkyy "Floor n-1" vilkkuva viesti (n-1 on seuraava kerros, jonka aiot tallentaa).
5) – Siirrä hyttiä alaspäin seuraavaan kerrokseen asti.Paina samanaikaisesti tarkastuslaatikon YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO-lattia-asennon sisään.
ELGO-laite antaa lyhyen akustisen palautteen vahvistaakseen, että lattiatiedot on tallennettu.
6) – Toista edellinen piste, kunnes alin kerros on saavutettu.
7) – Kun sitä Alakerran sijainti peliohjaimessa näkyy "BOTTOM" vilkkuva viesti, siirrä hytti akselin alimpaan kohtaan (puskureiden hytti).
Paina samanaikaisesti Inspection BOX -ruudun YLÖS- ja ALAS-painiketta 3 kertaa tallentaaksesi ELGO:n sisään alimman asennon. Tämä kohta on magneettinauhan alkuperä (0 mm kuvassa) ja on pohjarajojen vertailupiste (alarajakytkin, pohjatarkastusraja, ala-ETSL-ohjaus jne.).
ELGO-laite antaa pitkän akustisen palautteen tietojen tallentamisen vahvistamiseksi.
Tällä hetkellä ohjain tallentaa automaattisesti:
• Hankittujen lattioiden sijainti;
• Ovialueen sijainti, jota ohjain käyttää ovikoskettimien ohittamiseen (avaamista /uudelleentasaustaukoa edeltävä).
• Hidastusetäisyys nostonopeuden mukaan.
Leikkikentällä näkyy vilkkuva viesti: Siirrä nosto ylös alakerran asentoon. Ohjain asettaa ELGO:n normaalitilaan. (ei ole mahdollista aiemmin, koska ELGO olisi rajoilla avaamassa OC: tä ja lukitsemalla matkustamon).Playpadissa näkyy "ODOTA" vilkkuva viesti 10 sekunnin ajan, odota, kunnes se näkyy kerroksessa 0.
ELGO-laite pysäyttää akustisen äänimerkin ja led-TILA alkaa vilkkua (1 vilkkuu sekunnissa).
Nyt ELGO-laite toimii turvakoskettimissa:
• Elektroniset turvavarusteet (jos sellainen on)
• Elektroninen osg.
• Lopulliset rajakytkimet.
• Tarkastusrajakytkimiä ei vielä hallita, koska hissi on tilapäistilassa.
Ennen normaalia toimintatilaa on suoritettava automaattinen akselioppiminen oikeiden pysäytysmatkojen asettamiseksi ylös- ja alaspäin -suuntaan kullekin kerrolle.
Automaattinen oppimismenettely
9) – Hissin on oltava tilapäisesti käytössä. Aseta hissi pohjakerrokseen, jossa on puolet maksimikuormituksesta.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Käännä tarkastusvalitsin normaaliksi
Hissi alkaa liikkua automaattisesti:
• Ylös matkoja hidastuen ja pysähdy jokaisessa kerroksessa.
• Alaspäin suuntautuvat retket hidastuvuuksien kanssa ja pysähtyvät jokaisessa kerroksessa.
Kun mökki palaa alimpaan kerrokseen, järjestelmä on valmis kulkemaan normaaliin palveluun.
After automatic learning procedure in <Positioning>, Näytön kooderi voit asettaa:
• Hidastusetäisyydet normaalissa käytössä hidastusjuonen
– R1S (Pag. 3) ylöspäin hidastuvuusetäisyys
– R1D (Pag. 2) hidastuvuusetäisyys alaspäin
Nämä arvot asetetaan automaattisesti automaattisen oppimisen jälkeen hissin nopeuden mukaan (ks. nostonopeus ja hidastuvuusetäisyys).
• Pysähdysetäisyydet Shaft's Inspectionissa
– I_LIM_S ylöspäin pysähtyvä etäisyys ennen ylimmän kerroksen asentoa
– I_LIM_D alaspäin ennen alakerroksen asentoa
Kavennetussa päässä/kuopassa nämä arvot on otettava huomioon esikäynnistyneessä turvajärjestelmässä.
• Pysähdysmatkat normaalissa käytössä
– N_LIM_S ylöspäin pysähtyvä etäisyys ylimmän kerroksen asennon jälkeen
– N_LIM_D alaspäin pysäytysetäisyys alakerroksen asennon jälkeen
Nämä arvot asetetaan automaattisesti automaattisen oppimisen jälkeen etäisyydellä, joka on 30 mm äärimmäisistä kerroksista (jos etäisyys vertailupisteistä on pienempi, sitä pidetään keskipisteenä äärimmäisten kerrosten ja äärimmäisten vertailuasentojen välillä).
• ELGO+eSGC esikäynnisinasento
– TRIPS-etäisyys ylävertailuasennosta, jossa eSGC-sähkökomento pakottaa matkustamon pysähtymään (vain pienennetyssä pään nostossa).
– TRIPD-etäisyys alhaalta Vertailuasento, jossa eSGC-sähköinen komento pakottaa matkustamon pysähtymään (vain alennetun kuopan asennuksessa)
Nämä arvot ovat vain luku -arvoja ja ovat yli 0 mm vain, jos ELGO on osa turvajärjestelmää esikäynnistettyä järjestelmää (togheter, jossa on sähköinen turvavaruste / ylisuuri säädin).
DMG-kooderi tai moottorin enkooderi: Lattian automaattinen oppimismenettely
Asennuksen jälkeen ja TEMPORARY-käyttötilassa ohjain suorittaa useita ylöspäin/ alaspäin -testiajoja (ensin suuri nopeus, sitten hidas nopeus pysähdyksillä lattioissa) tarkan lattiapaikannuksen oppimiseksi.
Itseoppiminen:
1) – Varmista, että asennus on "Tilapäinen käyttö" -tilassa
2) – Varmista, että enkooderi jäljittää oikean ajosuunnan (etäisyyden lisääminen ylöspäin, etäisyyden pienentäminen alaspäin); aseta tarvittaessa "paikannus" -valikossa parametri Paikannusjärjestelmä myötäpäivään vastapäivään (tai päinvastoin) ja tallenna uusi asetus.

3) – Tarkista ZP (ovivyöhykkeen) tulon oikea lukema (PLAYPAD-moduulin ZP-merkkivalon on oltava päällä ovialueella)
4) – Tarkista oikea lukema AGB / AGH (hidastuvuusrajakytkimet) tulot (AGB / AGH on oltava auki hidastuvuusraja-asennoissa)
5) – Varmista, että hytti on pohjakerroksessa (AGB auki, ZP LED päällä)
6) – Siirry "Paikannus" -valikkoon, valitse Automaattinen asetusparametri ja kirjoita:
- DMG-kooderissa: kooderin resoluutio (64 tai 100 pulssilukua kooderin mallin mukaan), sitten lattiamagneettien pituus. (Ovivyöhykkeen pituus). Vahvista lattian kokonaislukumäärä ja paina sitten "Yes" aloittaaksesi toimenpiteen.
• Moottorin enkooderissa: kooderin resoluutio, moottorin suhde, vetopyörä ja roping. Vahvista kerroksen kokonaismäärä ja aloita toimenpide painamalla "Kyllä".
7) – Aseta tarkastuspaneelin valitsin normaaliin (jos sellainen on), varmista muuten, että turvaketju on suljettu.
Järjestelmä suorittaa seuraavat automaattiset toimet:
• Siirrytään ylöspäin, kunnes alakerran signaali ZP on kytketty pois päältä
• Siirtyy alaspäin, kunnes alakerran signaali ZP aktivoituu
• Liikkuminen suurella nopeudella ja sijainnin havaitsemisella jokaiselle lattialle (ovialueen magneettien alareuna); magneetin alareunan tarkka sijainti tallennetaan ohjaimen muistiin.
• Kun saavutat ylimmän hidastuvuuspisteen (AGH), järjestelmä kytkeytyy alhaiseen nopeuteen ja ylimmän kerroksen ovialueelle (ZP) saavuttaessa se pysähtyy.
• Liikkuminen alas suurella nopeudella ja sijainnin havaitsemisella jokaiselle lattialle (ovialueen magneettien yläreuna); magneetin yläreunan tarkka sijainti tallennetaan ohjaimen muistiin.
• Kun saavutat alimman hidastuvuuspisteen (AGB), järjestelmä pysähtyy alhaiseen nopeuteen ja kun se saavuttaa alakerran ovialueen (ZP), se pysähtyy.
• Eteneminen hidastuen ja pysähtyminen jokaisessa kerroksessa (ZP-magneettitasolla)
• Hidastuminen hidastuu ja pysähtyy jokaisessa kerroksessa (ZP-magneettitasolla)
Toisen ajosarjan jälkeen (joka päättyy alimpaan kerrokseen) asennus on valmis siirrymään SERVICE-tilaan.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
HUOMAUTUS:itseoppiminen on suoritettava aina, kun joko AGB / AGH-rajakytkimet ja / tai ovivyöhykemagneetit siirretään alkuperäisestä sijainnistaan.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH etäisyydet riittävät noston nopeuteen. Onko mahdollista lisätä/vähentää hidastumismatkoja normaalissa palvelussa R1S ja R1D ilman automaattisen oppimisen toistamista.
AGB/AGH-asennoissa ja hidastusmatkoissa käytä hissin nopeuden mukaan.
Järjestelmissä, joissa akselin ylä- ja alaosassa vaaditut vähimmäismitat on taattu standardin EN 81 vaatimusten mukaisesti, hissin pysäyttämiseksi tarkastuksessa on mahdollista käyttää kahta parametria.
In <Positioning>, Näytön kooderi
• I_LIM_S ylöspäin pysähtymisen etäisyyden ennen ylimmän kerroksen asentoa
• I_LIM_D alaspäin pysähtyvä etäisyys ennen alapohjan asentoa
Nämä pysähdysmatkat ovat voimassa tarkastusta varten akselilta (eivät ole aktiivisia, jos tarkastus konehuoneesta) voidaan käyttää välttämään teknikon juuttumisen vaaraa hissiakseliin.
Varo, että nämä pysäytysasemat eivät ole turvakontakteja.
Itseoppiminen:
1) – Varmista, että asennus on "Tilapäinen käyttö" -tilassa
2) – Varmista, että enkooderi jäljittää oikean ajosuunnan (etäisyyden lisääminen ylöspäin, etäisyyden pienentäminen alaspäin); aseta tarvittaessa "paikannus" -valikossa parametri Paikannusjärjestelmä myötäpäivään vastapäivään (tai päinvastoin) ja tallenna uusi asetus.
3) – Tarkista ZP (ovivyöhykkeen) tulon oikea lukema (PLAYPAD-moduulin ZP-merkkivalon on oltava päällä ovialueella)
4) – Tarkista oikea lukema AGB / AGH (hidastuvuusrajakytkimet) tulot (AGB / AGH on oltava auki hidastuvuusraja-asennoissa)
5) – Varmista, että hytti on pohjakerroksessa (AGB auki, ZP LED päällä)
6) – Siirry "Paikannus" -valikkoon, valitse Automaattinen asetusparametri ja kirjoita:
- DMG-kooderissa: kooderin resoluutio (64 tai 100 pulssilukua kooderin mallin mukaan), sitten lattiamagneettien pituus. (Ovivyöhykkeen pituus). Vahvista lattian kokonaislukumäärä ja paina sitten "Yes" aloittaaksesi toimenpiteen.
• Moottorin enkooderissa: kooderin resoluutio, moottorin suhde, vetopyörä ja roping. Vahvista kerroksen kokonaismäärä ja aloita toimenpide painamalla "Kyllä".
7) – Aseta tarkastuspaneelin valitsin normaaliin (jos sellainen on), varmista muuten, että turvaketju on suljettu.
Järjestelmä suorittaa seuraavat automaattiset toimet:
• Siirrytään ylöspäin, kunnes alakerran signaali ZP on kytketty pois päältä
• Siirtyy alaspäin, kunnes alakerran signaali ZP aktivoituu
• Liikkuminen suurella nopeudella ja sijainnin havaitsemisella jokaiselle lattialle (ovialueen magneettien alareuna); magneetin alareunan tarkka sijainti tallennetaan ohjaimen muistiin.
• Kun saavutat ylimmän hidastuvuuspisteen (AGH), järjestelmä kytkeytyy alhaiseen nopeuteen ja ylimmän kerroksen ovialueelle (ZP) saavuttaessa se pysähtyy.
• Liikkuminen alas suurella nopeudella ja sijainnin havaitsemisella jokaiselle lattialle (ovialueen magneettien yläreuna); magneetin yläreunan tarkka sijainti tallennetaan ohjaimen muistiin.
• Kun saavutat alimman hidastuvuuspisteen (AGB), järjestelmä pysähtyy alhaiseen nopeuteen ja kun se saavuttaa alakerran ovialueen (ZP), se pysähtyy.
• Eteneminen hidastuen ja pysähtyminen jokaisessa kerroksessa (ZP-magneettitasolla)
• Hidastuminen hidastuu ja pysähtyy jokaisessa kerroksessa (ZP-magneettitasolla)
Toisen ajosarjan jälkeen (joka päättyy alimpaan kerrokseen) asennus on valmis siirrymään SERVICE-tilaan.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
HUOMAUTUS:itseoppiminen on suoritettava aina, kun joko AGB / AGH-rajakytkimet ja / tai ovivyöhykemagneetit siirretään alkuperäisestä sijainnistaan.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH etäisyydet riittävät noston nopeuteen. Onko mahdollista lisätä/vähentää hidastumismatkoja normaalissa palvelussa R1S ja R1D ilman automaattisen oppimisen toistamista.
AGB/AGH-asennoissa ja hidastusmatkoissa käytä hissin nopeuden mukaan.
Järjestelmissä, joissa akselin ylä- ja alaosassa vaaditut vähimmäismitat on taattu standardin EN 81 vaatimusten mukaisesti, hissin pysäyttämiseksi tarkastuksessa on mahdollista käyttää kahta parametria.
In <Positioning>, Näytön kooderi
• I_LIM_S ylöspäin pysähtymisen etäisyyden ennen ylimmän kerroksen asentoa
• I_LIM_D alaspäin pysähtyvä etäisyys ennen alapohjan asentoa
Nämä pysähdysmatkat ovat voimassa tarkastusta varten akselilta (eivät ole aktiivisia, jos tarkastus konehuoneesta) voidaan käyttää välttämään teknikon juuttumisen vaaraa hissiakseliin.
Varo, että nämä pysäytysasemat eivät ole turvakontakteja.
Video-opetusohjelma
ELGO-paikannusjärjestelmän määrittäminen Pitagora 4.0 -ohjaimen avulla






