
Procédure d'apprentissage de niveaux
Si le site armoire de manœuvre est équipé d'un codeur absolu, d'un codeur DMG ou d'un codeur de moteur, il est possible de profiter de la fonction d'apprentissage de la position niveau , qui permet une configuration et un réglage fin plus rapides du système. La procédure est différente selon le type d'encodeur, comme décrit dans les sections suivantes :
ELGO LIMAX 33CP : Procédure d'apprentissage
Procédure d'apprentissage manuel
Si dans l'installation il n'y a pas assez de dégagement (Tête Réduite) il est recommandé de faire l'apprentissage manuel de l'extérieur de l'ascenseur gaine (au moins les 3 premières étapes) : Dans ce cas, vous pouvez utiliser le boîtier d'inspection à l'intérieur de armoire de manœuvre et après le Top of ar Inspection BOX.
 Cette procédure doit être effectuée avant de mettre le système en mode Normal.
Cette procédure doit être effectuée avant de mettre le système en mode Normal.
Pour commencer la procédure, l'ascenseur doit être en fonctionnement temporaire. Jusqu'à la fin de la procédure d'apprentissage manuel, les contacts de sécurité sont connectés à la chaîne de sécurité mais ne sont pas encore opérationnels (interrupteur de fin de course final, interrupteur de fin de course d'inspection, OSG, eSGC) parce que l'ELGO ne connaît pas la position réelle des points limites du site gaine. Le seul contrôle basé sur le dispositif ELGO est l'apprentissage de la vitesse (0,4 m/s), donc si la vitesse de la cabine est supérieure à 0,4 m/s, l'ELGO ouvre le contact OC (et ferme le contact OC une fois que la cabine est immobile).
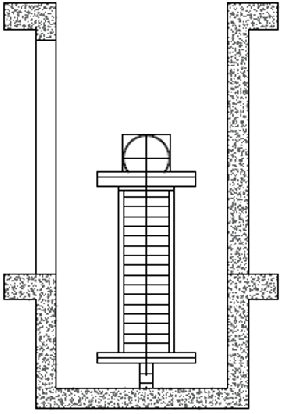 1) - Mettre l'ascenseur voiture dans la position la plus haute (contrepoids sur les tampons).
1) - Mettre l'ascenseur voiture dans la position la plus haute (contrepoids sur les tampons).
2) - Appuyer simultanément sur les boutons UP et DOWN du boîtier d'inspection 3 fois pour mettre l'appareil ELGO en mode Teach. Sur le playpad apparaît un message clignotant WAIT (en cas de problème la procédure s'arrête avec un Fault ELGO, voir Troubleshooting).
L'appareil ELGO allume la led MODE et commence à donner un feedback acoustique (un bip toutes les 2 secondes). Ce signal acoustique signalisation sera présent tout au long de la procédure d'apprentissage manuel. Sur le playpad, le message "TOP" clignote.
 3) – Appuyer à nouveau simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer à l'intérieur de l'ELGO le point le plus haut du gaine. Ce point sera le point de référence pour les limites supérieures (interrupteur de limite supérieure, limite d'inspection supérieure, contrôle TOP ETSL, etc.).
3) – Appuyer à nouveau simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer à l'intérieur de l'ELGO le point le plus haut du gaine. Ce point sera le point de référence pour les limites supérieures (interrupteur de limite supérieure, limite d'inspection supérieure, contrôle TOP ETSL, etc.).
Le site Le dispositif ELGO émet un long retour acoustique pour confirmer que les données de la limite supérieure ont été enregistrées.
Sur le playpad apparaît un message clignotant "Niveau n" (n est le niveau que vous allez enregistrer).
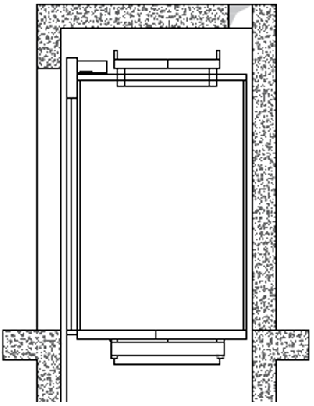
4) – Déplacez la cabine jusqu'au plus haut niveau.
Appuyez simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer dans l'ELGO la position de niveau .
Le site Le dispositif ELGO émet un bref retour acoustique pour confirmer que les données niveau ont été enregistrées.
Sur le playpad apparaît un message clignotant "Niveau n-1 " (n-1 est le prochain niveau que vous allez enregistrer).
 5) – Déplacez la cabine vers le bas jusqu'au prochain niveau.
5) – Déplacez la cabine vers le bas jusqu'au prochain niveau.
Appuyez simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer dans l'ELGO la position de niveau .
Le dispositif ELGO émet un bref retour acoustique pour confirmer que les données niveau ont été enregistrées.
6) – Répétez le point précédent jusqu'à ce que le plus bas niveau soit atteint.
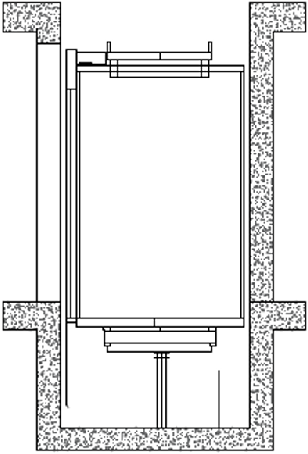
7) – Après l'enregistrement de le site Position du fond niveau sur le playpad affiche un message clignotant "BOTTOM".déplacez la cabine au point le plus bas du site gaine (cabine sur les tampons).
Appuyer simultanément sur les boutons UP et DOWN du boîtier d'inspection 3 fois pour enregistrer à l'intérieur d'ELGO la position la plus basse. Ce point est l'origine de la bande magnétique (0 mm montré) et sera le point de référence pour les limites inférieures (interrupteur de limite inférieure, limite d'inspection inférieure, contrôle ETSL inférieur, etc.).
Le dispositif ELGO émet un long retour acoustique pour confirmer l'enregistrement des données.
A ce moment, armoire de manœuvre enregistre automatiquement :
- Position de la zone acquise niveaux;
- Position de la zone de la porte, utilisée par le armoire de manœuvre pour activer le contournement des contacts de la porte (préouverture / remise à niveau).
- Distance de décélération, en fonction de la vitesse de l'ascenseur.
 Sur le playpad, le message "/\" clignote : Déplacez l'ascenseur vers le haut jusqu'à la position inférieure niveau . Le armoire de manœuvre mettra l'ELGO en mode normal. (ce qui n'était pas possible auparavant car l'ELGO serait sur les limites de l'ouverture de l'OC et du verrouillage de la cabine).
Sur le playpad, le message "/\" clignote : Déplacez l'ascenseur vers le haut jusqu'à la position inférieure niveau . Le armoire de manœuvre mettra l'ELGO en mode normal. (ce qui n'était pas possible auparavant car l'ELGO serait sur les limites de l'ouverture de l'OC et du verrouillage de la cabine).
Sur le clavier, le message "WAIT" clignote pendant 10 secondes, attendez jusqu'à ce que le message Niveau 0 apparaisse.
L'appareil ELGO arrête le bip sonore et la led MODE commence à clignoter (1 clignotement par seconde).
Maintenant, le dispositif ELGO est opérationnel pour les contacts de sécurité :
- Équipement de sécurité électronique (si présent)
- OSG électronique.
- Fins de course finales.
- Les fins de course d'inspection ne sont pas encore gérées car l'ascenseur est en mode temporaire..
Avant de passer en mode de fonctionnement normal, il est obligatoire d'exécuter un apprentissage automatique sur gaine afin de définir les distances d'arrêt correctes dans les sens ascendant et descendant pour chaque niveau.
Procédure d'apprentissage automatique
9) - L'élévateur doit être en fonctionnement temporaire. Placez l'ascenseur sur le fond niveau avec la moitié de la charge maximale.

10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.

Tournez le sélecteur d'inspection sur Normal
L'ascenseur commence à se déplacer automatiquement :
- Déplacements ascendants avec décélération et arrêt à chaque niveau.
- Déplacement vers le bas avec décélération et arrêt à chaque niveau.
Lorsque la cabine revient au niveau le plus bas niveau , le système est prêt à passer en service normal.
After automatic learning procedure in <Positioning>, Moniteur Encoder que vous pouvez régler :
- Distances de décélération en service normal pour le confort de décélération
- R1S (Pag. 3) distance de décélération vers le haut
- R1D (Pag. 2) distance de décélération vers le bas
Ces valeurs sont fixées automatiquement après un apprentissage automatique en fonction de la vitesse de l'ascenseur (voir vitesse de levage et distance de décélération).
- Distances d'arrêt dans l'inspection de gaine
- I_LIM_S distance d'arrêt vers le haut avant la position supérieure niveau
- I_LIM_D distance d'arrêt vers le bas avant la position inférieure niveau
Dans le cas d'une tête réduite ou d'une fosse, ces valeurs doivent être prises en compte en fonction du système de sécurité pré-déclenché.
- Distances d'arrêt en service normal
- N_LIM_S distance d'arrêt vers le haut après la position supérieure niveau
- N_LIM_D distance d'arrêt vers le bas après la position inférieure niveau
Ces valeurs sont fixées automatiquement après l'apprentissage automatique à une distance égale à 30 mm de l'extrême niveaux (en cas de distance moindre par rapport aux points de référence, on considère le point intermédiaire entre l'extrême niveau et les positions de référence extrêmes).
- Position de pré-déclenchement ELGO+eSGC
- Distance entre le sommet et la position de référence où la commande électrique eSGC force la cabine à s'arrêter (uniquement pour le levage réduit de la tête).
- TRIPD distance du fond Position de référence où la commande électrique eSGC force la cabine à s'arrêter (uniquement pour l'installation à fosse réduite)
Ces valeurs sont des valeurs en lecture seule et sont supérieures à 0 mm uniquement si ELGO fait partie du système de pré-déclenchement de sécurité (en même temps que le réducteur de sécurité électrique / le régulateur de survitesse).
Si dans l'installation il n'y a pas assez de dégagement (Tête Réduite) il est recommandé de faire l'apprentissage manuel de l'extérieur de l'ascenseur gaine (au moins les 3 premières étapes) : Dans ce cas, vous pouvez utiliser le boîtier d'inspection à l'intérieur de armoire de manœuvre et après le Top of ar Inspection BOX.
Pour commencer la procédure, l'ascenseur doit être en fonctionnement temporaire. Jusqu'à la fin de la procédure d'apprentissage manuel, les contacts de sécurité sont connectés à la chaîne de sécurité mais ne sont pas encore opérationnels (interrupteur de fin de course final, interrupteur de fin de course d'inspection, OSG, eSGC) parce que l'ELGO ne connaît pas la position réelle des points limites du site gaine. Le seul contrôle basé sur le dispositif ELGO est l'apprentissage de la vitesse (0,4 m/s), donc si la vitesse de la cabine est supérieure à 0,4 m/s, l'ELGO ouvre le contact OC (et ferme le contact OC une fois que la cabine est immobile).
1) - Mettre l'ascenseur voiture dans la position la plus haute (contrepoids sur les tampons).2) - Appuyer simultanément sur les boutons UP et DOWN du boîtier d'inspection 3 fois pour mettre l'appareil ELGO en mode Teach. Sur le playpad apparaît un message clignotant WAIT (en cas de problème la procédure s'arrête avec un Fault ELGO, voir Troubleshooting).
L'appareil ELGO allume la led MODE et commence à donner un feedback acoustique (un bip toutes les 2 secondes). Ce signal acoustique signalisation sera présent tout au long de la procédure d'apprentissage manuel. Sur le playpad, le message "TOP" clignote.
3) – Appuyer à nouveau simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer à l'intérieur de l'ELGO le point le plus haut du gaine. Ce point sera le point de référence pour les limites supérieures (interrupteur de limite supérieure, limite d'inspection supérieure, contrôle TOP ETSL, etc.).Le site Le dispositif ELGO émet un long retour acoustique pour confirmer que les données de la limite supérieure ont été enregistrées.
Sur le playpad apparaît un message clignotant "Niveau n" (n est le niveau que vous allez enregistrer).
4) – Déplacez la cabine jusqu'au plus haut niveau.
Appuyez simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer dans l'ELGO la position de niveau .
Le site Le dispositif ELGO émet un bref retour acoustique pour confirmer que les données niveau ont été enregistrées.
Sur le playpad apparaît un message clignotant "Niveau n-1 " (n-1 est le prochain niveau que vous allez enregistrer).
5) – Déplacez la cabine vers le bas jusqu'au prochain niveau.Appuyez simultanément sur les boutons UP et DOWN de l'Inspection BOX 3 fois pour enregistrer dans l'ELGO la position de niveau .
Le dispositif ELGO émet un bref retour acoustique pour confirmer que les données niveau ont été enregistrées.
6) – Répétez le point précédent jusqu'à ce que le plus bas niveau soit atteint.
7) – Après l'enregistrement de le site Position du fond niveau sur le playpad affiche un message clignotant "BOTTOM".déplacez la cabine au point le plus bas du site gaine (cabine sur les tampons).
Appuyer simultanément sur les boutons UP et DOWN du boîtier d'inspection 3 fois pour enregistrer à l'intérieur d'ELGO la position la plus basse. Ce point est l'origine de la bande magnétique (0 mm montré) et sera le point de référence pour les limites inférieures (interrupteur de limite inférieure, limite d'inspection inférieure, contrôle ETSL inférieur, etc.).
Le dispositif ELGO émet un long retour acoustique pour confirmer l'enregistrement des données.
A ce moment, armoire de manœuvre enregistre automatiquement :
- Position de la zone acquise niveaux;
- Position de la zone de la porte, utilisée par le armoire de manœuvre pour activer le contournement des contacts de la porte (préouverture / remise à niveau).
- Distance de décélération, en fonction de la vitesse de l'ascenseur.
Sur le playpad, le message "/\" clignote : Déplacez l'ascenseur vers le haut jusqu'à la position inférieure niveau . Le armoire de manœuvre mettra l'ELGO en mode normal. (ce qui n'était pas possible auparavant car l'ELGO serait sur les limites de l'ouverture de l'OC et du verrouillage de la cabine).Sur le clavier, le message "WAIT" clignote pendant 10 secondes, attendez jusqu'à ce que le message Niveau 0 apparaisse.
L'appareil ELGO arrête le bip sonore et la led MODE commence à clignoter (1 clignotement par seconde).
Maintenant, le dispositif ELGO est opérationnel pour les contacts de sécurité :
- Équipement de sécurité électronique (si présent)
- OSG électronique.
- Fins de course finales.
- Les fins de course d'inspection ne sont pas encore gérées car l'ascenseur est en mode temporaire..
Avant de passer en mode de fonctionnement normal, il est obligatoire d'exécuter un apprentissage automatique sur gaine afin de définir les distances d'arrêt correctes dans les sens ascendant et descendant pour chaque niveau.
Procédure d'apprentissage automatique
9) - L'élévateur doit être en fonctionnement temporaire. Placez l'ascenseur sur le fond niveau avec la moitié de la charge maximale.
10) – Go into <Positioning> and set the Autosetting parameter to “Yes”.
Tournez le sélecteur d'inspection sur Normal
L'ascenseur commence à se déplacer automatiquement :
- Déplacements ascendants avec décélération et arrêt à chaque niveau.
- Déplacement vers le bas avec décélération et arrêt à chaque niveau.
Lorsque la cabine revient au niveau le plus bas niveau , le système est prêt à passer en service normal.
After automatic learning procedure in <Positioning>, Moniteur Encoder que vous pouvez régler :
- Distances de décélération en service normal pour le confort de décélération
- R1S (Pag. 3) distance de décélération vers le haut
- R1D (Pag. 2) distance de décélération vers le bas
Ces valeurs sont fixées automatiquement après un apprentissage automatique en fonction de la vitesse de l'ascenseur (voir vitesse de levage et distance de décélération).
- Distances d'arrêt dans l'inspection de gaine
- I_LIM_S distance d'arrêt vers le haut avant la position supérieure niveau
- I_LIM_D distance d'arrêt vers le bas avant la position inférieure niveau
Dans le cas d'une tête réduite ou d'une fosse, ces valeurs doivent être prises en compte en fonction du système de sécurité pré-déclenché.
- Distances d'arrêt en service normal
- N_LIM_S distance d'arrêt vers le haut après la position supérieure niveau
- N_LIM_D distance d'arrêt vers le bas après la position inférieure niveau
Ces valeurs sont fixées automatiquement après l'apprentissage automatique à une distance égale à 30 mm de l'extrême niveaux (en cas de distance moindre par rapport aux points de référence, on considère le point intermédiaire entre l'extrême niveau et les positions de référence extrêmes).
- Position de pré-déclenchement ELGO+eSGC
- Distance entre le sommet et la position de référence où la commande électrique eSGC force la cabine à s'arrêter (uniquement pour le levage réduit de la tête).
- TRIPD distance du fond Position de référence où la commande électrique eSGC force la cabine à s'arrêter (uniquement pour l'installation à fosse réduite)
Ces valeurs sont des valeurs en lecture seule et sont supérieures à 0 mm uniquement si ELGO fait partie du système de pré-déclenchement de sécurité (en même temps que le réducteur de sécurité électrique / le régulateur de survitesse).
Codeur DMG ou codeur de moteur : Procédure d'apprentissage automatique de niveaux
Après l'installation et pendant le mode de FONCTIONNEMENT TEMPORAIRE, le armoire de manœuvre effectue un certain nombre d'essais de montée/descente (d'abord à grande vitesse, puis à petite vitesse avec des arrêts à niveaux) dans le but d'apprendre le positionnement exact de niveau .
Procédure d'auto-apprentissage :
1) – Assurez-vous que l'installation est en mode "fonctionnement temporaire".
2) – Vérifier que le codeur trace le sens correct de la course (distance croissante vers le haut, distance décroissante vers le bas) ; si nécessaire, dans le menu "positionnement", régler le paramètre Système de positionnement de sens horaire à sens antihoraire (ou vice versa) et enregistrer le nouveau réglage.

3) – Vérifiez la lecture correcte de l'entrée ZP (zone de porte) (la LED ZP du module PLAYPAD doit être allumée lorsqu'elle est en zone de porte).
4) – Vérifiez la lecture correcte des entrées AGB/AGH (interrupteurs de fin de course de décélération) (les AGB/AGH doivent être ouverts lorsqu'ils sont en position de fin de course de décélération).
5) – Assurez-vous que la cabine est au fond niveau (AGB ouvert, LED ZP allumée)
6) – Entrez dans le menu "Positionnement", sélectionnez le paramètre "Réglage automatique" et entrez :
- Sur l'encodeur DMG : la résolution de l'encodeur (64 ou 100 numéros d'impulsion selon le modèle d'encodeur), puis la longueur des aimants niveau . (Longueur de la zone de porte). Confirmez le nombre total de niveau, puis appuyez sur "Oui" pour lancer la procédure.
- Sur l'encodeur du moteur : la résolution de l'encodeur, le rapport du moteur, la poulie de traction et l'encordement. Confirmez le nombre total de niveau, puis appuyez sur "Oui" pour lancer la procédure.
7) – Placez le sélecteur du panneau d'inspection sur NORMAL (si présent), sinon assurez-vous que la chaîne de sécurité est fermée.
Le système exécute la procédure automatique suivante :
- En remontant, jusqu'à ce que le ZP signalisation du bas niveau soit désactivé.
- Se déplacer vers le bas, jusqu'à ce que le signalisation ZP du bas niveau soit activé.
- Déplacement à grande vitesse et détection de la position de chaque niveau (bord inférieur des aimants de la zone de la porte) ; la position exacte du bord inférieur de l'aimant est enregistrée dans la mémoire de armoire de manœuvre .
- Lorsqu'il atteint le point de décélération supérieur (AGH), le système passe en vitesse lente et lorsqu'il atteint la zone supérieure de la porte niveau (ZP), il s'arrête.
- Descente à grande vitesse et détection de la position de chaque niveau (bord supérieur des aimants de la zone de la porte) ; la position exacte du bord supérieur de l'aimant est enregistrée dans la mémoire de armoire de manœuvre .
- Lorsqu'il atteint le point de décélération inférieur (AGB), le système passe en basse vitesse et lorsqu'il atteint la zone inférieure de la porte niveau (ZP), il s'arrête.
- Déplacement vers le haut, ralentissement et arrêt à chaque niveau (au niveau de l'aimant ZP)
- Déplacement vers le bas en ralentissant et en s'arrêtant à chaque niveau (au niveau de l'aimant ZP)
Après la deuxième série d'exécutions (qui se termine par au le plus bas niveau), l'installation est prête à passer en mode SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTEla procédure d'auto-apprentissage doit être effectuée chaque fois que les interrupteurs de fin de course AGB/AGH et/ou les aimants de zone de porte sont déplacés de leur position initiale.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH sont suffisantes pour la vitesse de l'ascenseur. Est-il possible d'augmenter/diminuer les distances de décélération en service normal R1S et R1D sans avoir à répéter la procédure d'apprentissage automatique ?
Pour les positions AGB/AGH et les distances de décélération, utilisez tableau selon la vitesse de l'ascenseur.
Dans les systèmes où les dimensions minimales requises en haut et en bas du gaine sont garanties selon les exigences de la norme EN 81, il est possible d'utiliser deux paramètres pour arrêter l'ascenseur en inspection.
In <Positioning>, Moniteur Encoder
- I_LIM_S distance d'arrêt vers le haut avant la position supérieure niveau
- I_LIM_D distance d'arrêt vers le bas avant la position inférieure niveau
Ces distances d'arrêt sont valables pour l'inspection depuis le site gaine (elles ne sont pas actives en cas d'inspection depuis la salle des machines) et peuvent être utilisées pour éviter le risque que le technicien soit coincé dans l'ascenseur gaine.
Il faut savoir que ces positions d'arrêt ne sont pas des contacts de sécurité.
Procédure d'auto-apprentissage :
1) – Assurez-vous que l'installation est en mode "fonctionnement temporaire".
2) – Vérifier que le codeur trace le sens correct de la course (distance croissante vers le haut, distance décroissante vers le bas) ; si nécessaire, dans le menu "positionnement", régler le paramètre Système de positionnement de sens horaire à sens antihoraire (ou vice versa) et enregistrer le nouveau réglage.
3) – Vérifiez la lecture correcte de l'entrée ZP (zone de porte) (la LED ZP du module PLAYPAD doit être allumée lorsqu'elle est en zone de porte).
4) – Vérifiez la lecture correcte des entrées AGB/AGH (interrupteurs de fin de course de décélération) (les AGB/AGH doivent être ouverts lorsqu'ils sont en position de fin de course de décélération).
5) – Assurez-vous que la cabine est au fond niveau (AGB ouvert, LED ZP allumée)
6) – Entrez dans le menu "Positionnement", sélectionnez le paramètre "Réglage automatique" et entrez :
- Sur l'encodeur DMG : la résolution de l'encodeur (64 ou 100 numéros d'impulsion selon le modèle d'encodeur), puis la longueur des aimants niveau . (Longueur de la zone de porte). Confirmez le nombre total de niveau, puis appuyez sur "Oui" pour lancer la procédure.
- Sur l'encodeur du moteur : la résolution de l'encodeur, le rapport du moteur, la poulie de traction et l'encordement. Confirmez le nombre total de niveau, puis appuyez sur "Oui" pour lancer la procédure.
7) – Placez le sélecteur du panneau d'inspection sur NORMAL (si présent), sinon assurez-vous que la chaîne de sécurité est fermée.
Le système exécute la procédure automatique suivante :
- En remontant, jusqu'à ce que le ZP signalisation du bas niveau soit désactivé.
- Se déplacer vers le bas, jusqu'à ce que le signalisation ZP du bas niveau soit activé.
- Déplacement à grande vitesse et détection de la position de chaque niveau (bord inférieur des aimants de la zone de la porte) ; la position exacte du bord inférieur de l'aimant est enregistrée dans la mémoire de armoire de manœuvre .
- Lorsqu'il atteint le point de décélération supérieur (AGH), le système passe en vitesse lente et lorsqu'il atteint la zone supérieure de la porte niveau (ZP), il s'arrête.
- Descente à grande vitesse et détection de la position de chaque niveau (bord supérieur des aimants de la zone de la porte) ; la position exacte du bord supérieur de l'aimant est enregistrée dans la mémoire de armoire de manœuvre .
- Lorsqu'il atteint le point de décélération inférieur (AGB), le système passe en basse vitesse et lorsqu'il atteint la zone inférieure de la porte niveau (ZP), il s'arrête.
- Déplacement vers le haut, ralentissement et arrêt à chaque niveau (au niveau de l'aimant ZP)
- Déplacement vers le bas en ralentissant et en s'arrêtant à chaque niveau (au niveau de l'aimant ZP)
Après la deuxième série d'exécutions (qui se termine par au le plus bas niveau), l'installation est prête à passer en mode SERVICE.
At the end of the procedure, go to menu <Positioning> Monitor Encoder and check that the distances of AGB and AGH (4/5) are fine for your installation (compare distances shown on diagrams provided). It is always possible to set R1D (2/5) and R1S (3/5) slow down distances to improve deceleration comfort without changing the limit switches position and without repeating the self learning procedure.
NOTEla procédure d'auto-apprentissage doit être effectuée chaque fois que les interrupteurs de fin de course AGB/AGH et/ou les aimants de zone de porte sont déplacés de leur position initiale.
After automatic learning procedure in <Positioning>, Monitor Encoder check if AGB/AGH sont suffisantes pour la vitesse de l'ascenseur. Est-il possible d'augmenter/diminuer les distances de décélération en service normal R1S et R1D sans avoir à répéter la procédure d'apprentissage automatique ?
Pour les positions AGB/AGH et les distances de décélération, utilisez tableau selon la vitesse de l'ascenseur.
Dans les systèmes où les dimensions minimales requises en haut et en bas du gaine sont garanties selon les exigences de la norme EN 81, il est possible d'utiliser deux paramètres pour arrêter l'ascenseur en inspection.
In <Positioning>, Moniteur Encoder
- I_LIM_S distance d'arrêt vers le haut avant la position supérieure niveau
- I_LIM_D distance d'arrêt vers le bas avant la position inférieure niveau
Ces distances d'arrêt sont valables pour l'inspection depuis le site gaine (elles ne sont pas actives en cas d'inspection depuis la salle des machines) et peuvent être utilisées pour éviter le risque que le technicien soit coincé dans l'ascenseur gaine.
Il faut savoir que ces positions d'arrêt ne sont pas des contacts de sécurité.
Tutoriel vidéo
Comment configurer le système de positionnement ELGO avec un armoire de manœuvre Pitagora 4.0






