
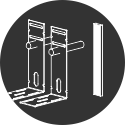
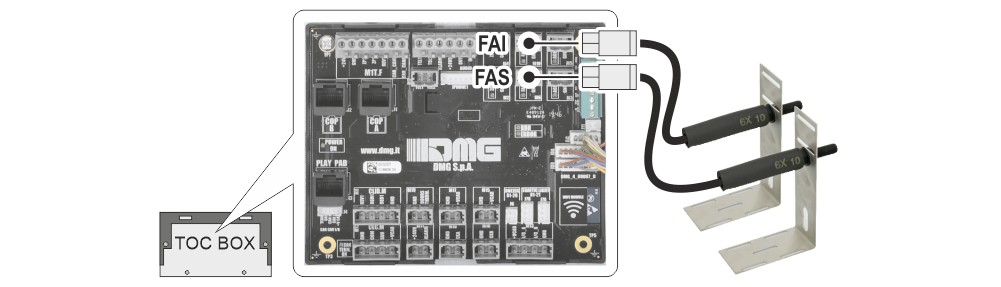
Magneettiset lukijat (FAI / FAS)
Tämä laskenta-järjestelmä koostuu kahdesta magneettilukijasta (FAI-FAS), joissa on normaalisti avoin kosketin ja jotka on asennettu kahteen kiinnikkeeseen hissikopion yläosaan, sekä magneettisarjasta, joka on asennettu hissin kiskoihin.
Tätä laskenta-järjestelmää voidaan käyttää, kun järjestelmän ominaisuudet täyttävät seuraavat ehdot:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Asennus

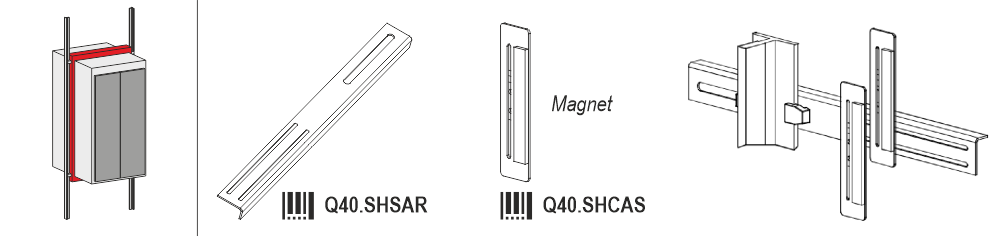
Tapaus A: Hissit, joissa on runkomekaniikka
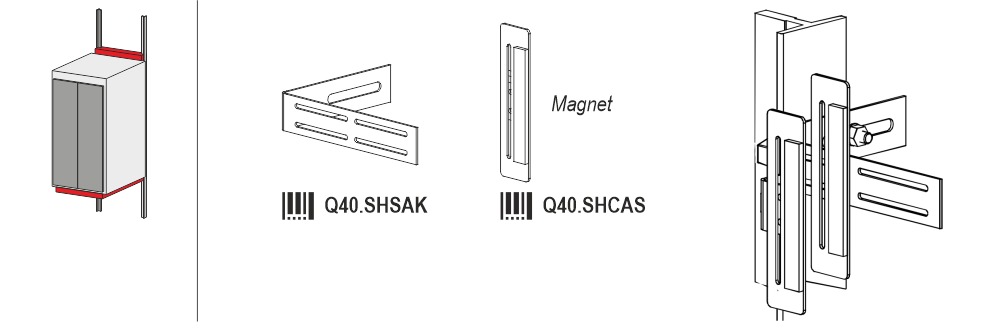
Tapaus B: Hissit, joissa on reppumekaniikka
Lisävarusteet erityistapauksia varten
Magneettien sijoittaminen hissin ohjaimiin
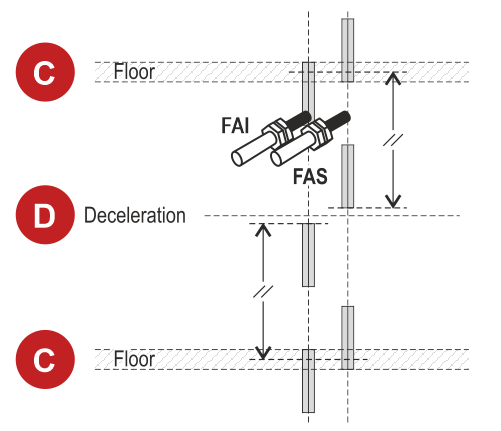
C) Lattiat
D) Hidastuvuus
Johdotukset
Magneettiset lukijat on kytketty suoraan TOC-laatikkoon (ohjaamon yläosassa).
Moottorin enkooderi
Tätä laskenta-järjestelmää voidaan käyttää vain järjestelmissä, joiden nopeus on alle 2 m/s ja joissa ei ole avoimen oven liikkeitä. Se sopii vain seuraaville valinnaisille korteille, jotka on tarkoitettu suljetun piirin järjestelmillä varustetuille vaihteettomille moottoreille:
OPC-PR Q40.SCLSC – Enkooderi Sin Cos
OPC-PS Q40.SCLFL – Enkooderi En Dat
OPC-PSH Q40.SCLSCH – Enkooderi Sin Cos+Hiperface
Ohjain käsittelee OPC-korttien lähettämiä signaaleja ja muuntaa pulssit lukemiksi.
Tämän laskentajärjestelmän tarkkuus on noin 1 millimetri.

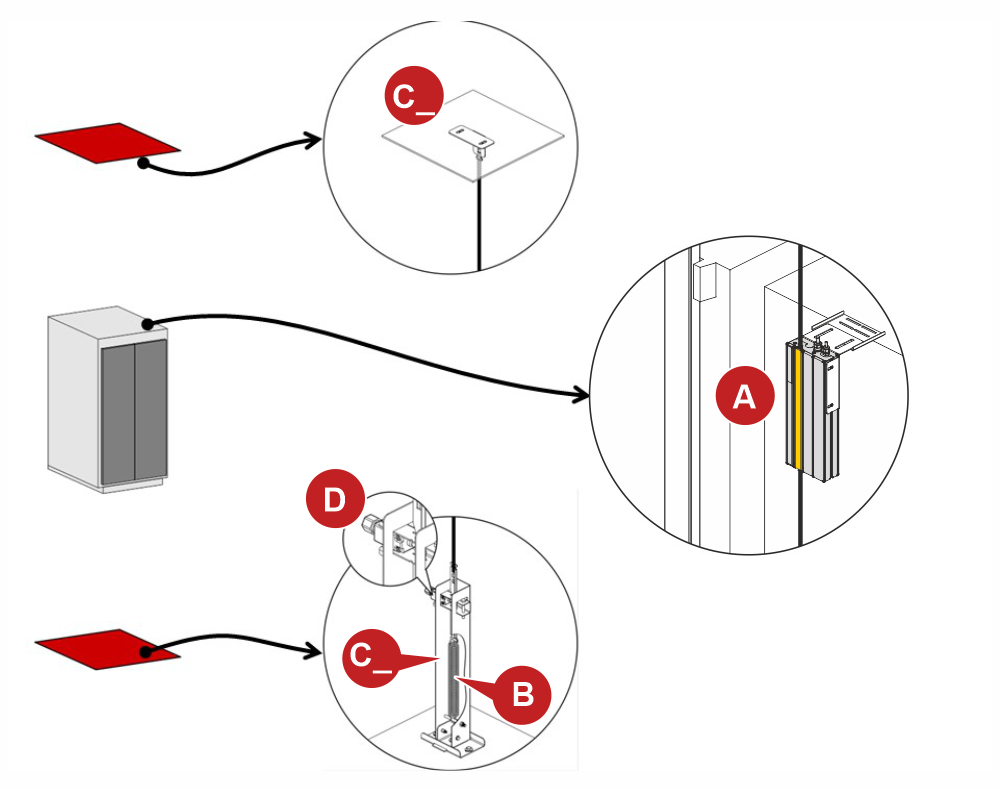
DMG-köysimagneettinen enkooderi
Uusi DMG-magneettinen enkooderi käyttää anturia tunnistamaan enkooderin hihnapyörän akselille asetetun magneetin pyörimisen ja sijainnin. Tuotetut pulssit vastaanotetaan ja käsitellään hissin ohjauspaneelissa, joka laskee hissikorin sijainnin, suunnan ja nopeuden.
Asennus
Neuvot ja varoitukset
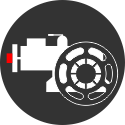
Enkooderin sisältävä hihnapyörä on asennettava akselin yläosaan tai kuiluun, lähelle konehuonetta.
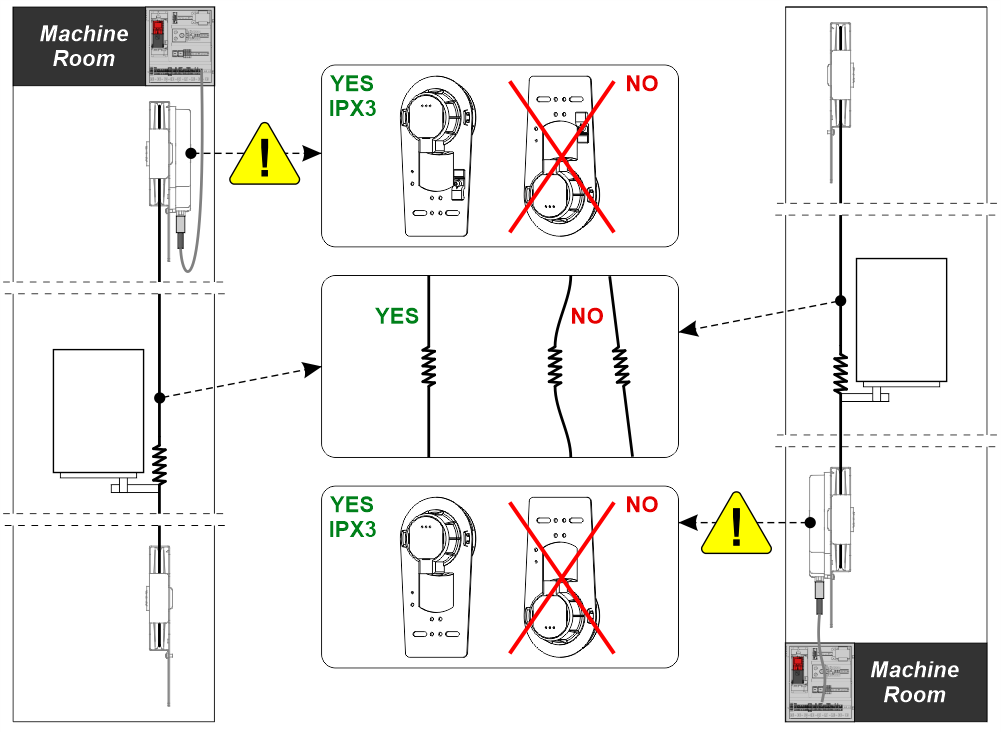
Järjestelmän komponentit
Tapaus 1: Hissit, joissa on runkomekaniikka
Tapaus 2: Hissit, joissa on reppumekaniikka
A) – Se on enkooderin hihnapyörä, joka sisältää elektronisen kortin. Sillä voi olla 2 erilaista tarkkuutta:
– 1,25 mm (100 PPR) punaisella merkitylle enkooderille: Käytetään Pitagora 4.0 -ohjaimen kanssa alkaen firmware-versiosta 3.0.2
– 2,5 mm (50 PPR) sinisellä merkitylle enkooderille: Käytetään V3 / Musa / Pitagora 4.0 -ohjaimien kanssa, joiden laiteohjelmistoversio on enintään Y
C) – Jousikiristin voidaan tarvittaessa asentaa myös ohjaamon katolle.
Asennus
Asennus riippuu asennuksen mekaniikasta.
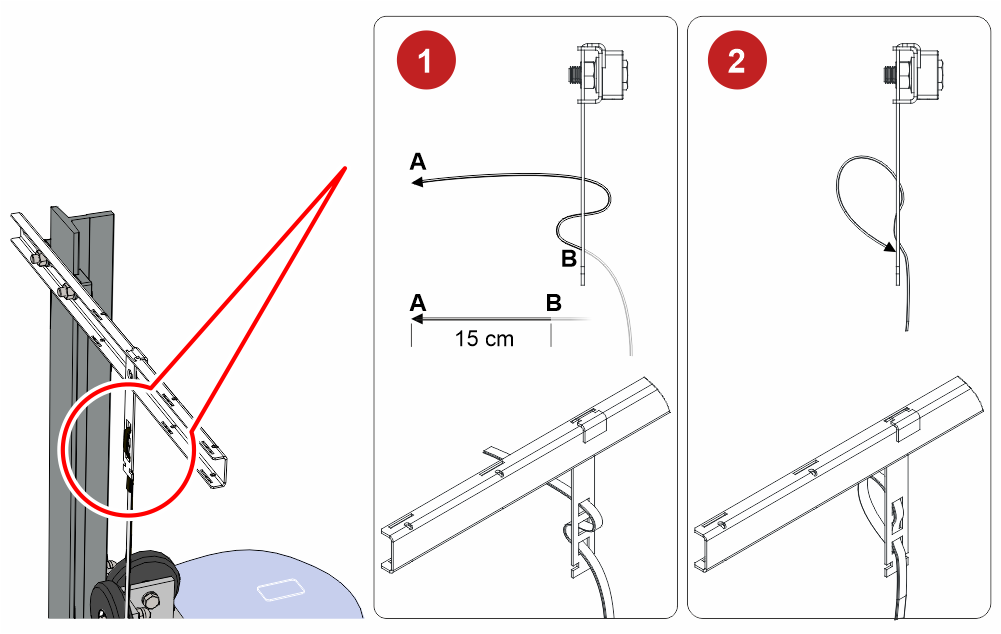
Tapaus 1 – Kehysmekaniikalla varustetut hissit
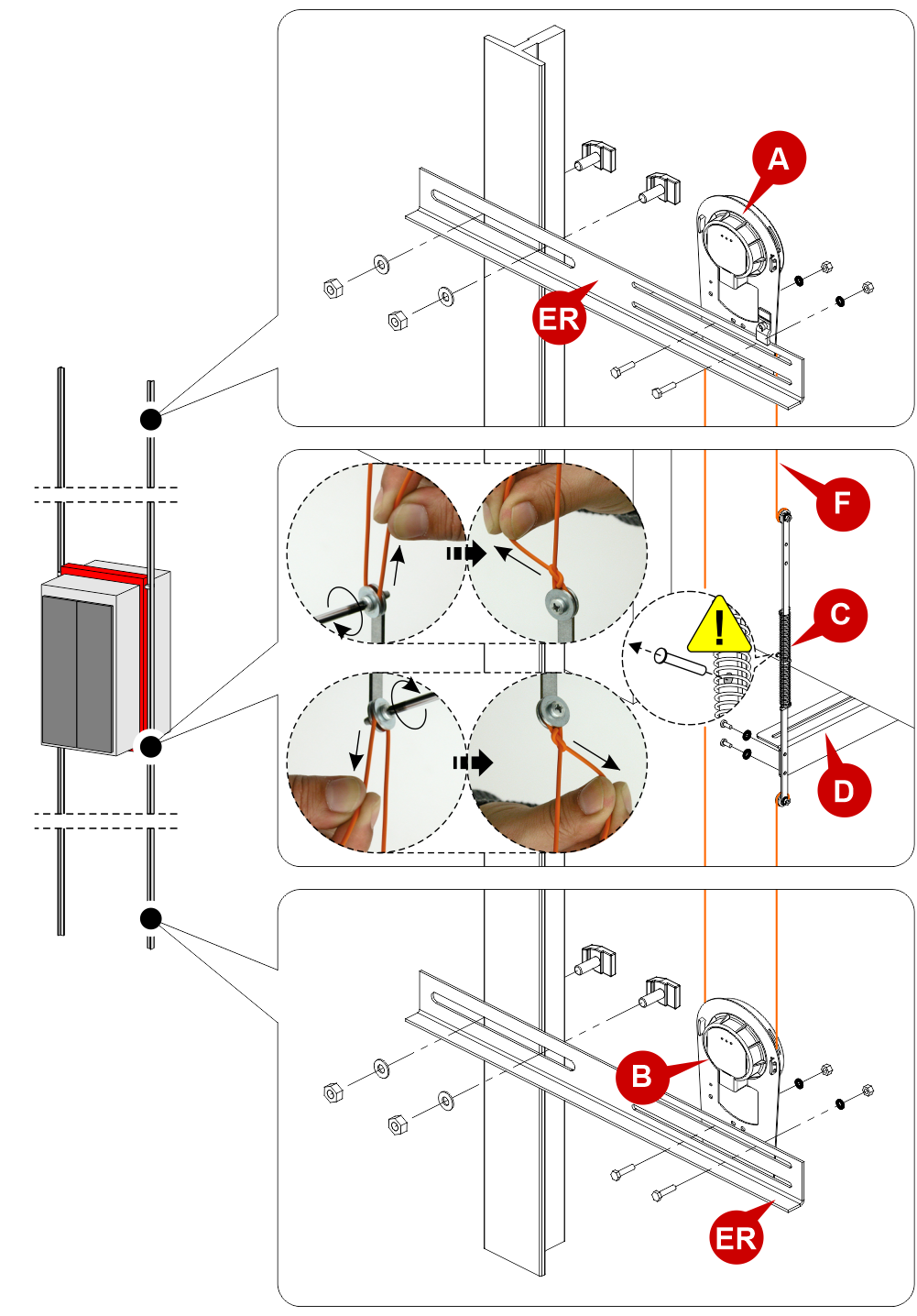
C) – Jousikiristin voidaan tarvittaessa asentaa myös ohjaamon katolle.
![]() Poista pidike vasta, kun asennus on valmis.
Poista pidike vasta, kun asennus on valmis.
Vanhojen järjestelmien vaihdon yhteydessä vanha köysi on irrotettava ja kiristettävä uudelleen uuden enkooderin asennuksen jälkeen.
Tapaus 2 – Hissit, joissa on reppumekanismi
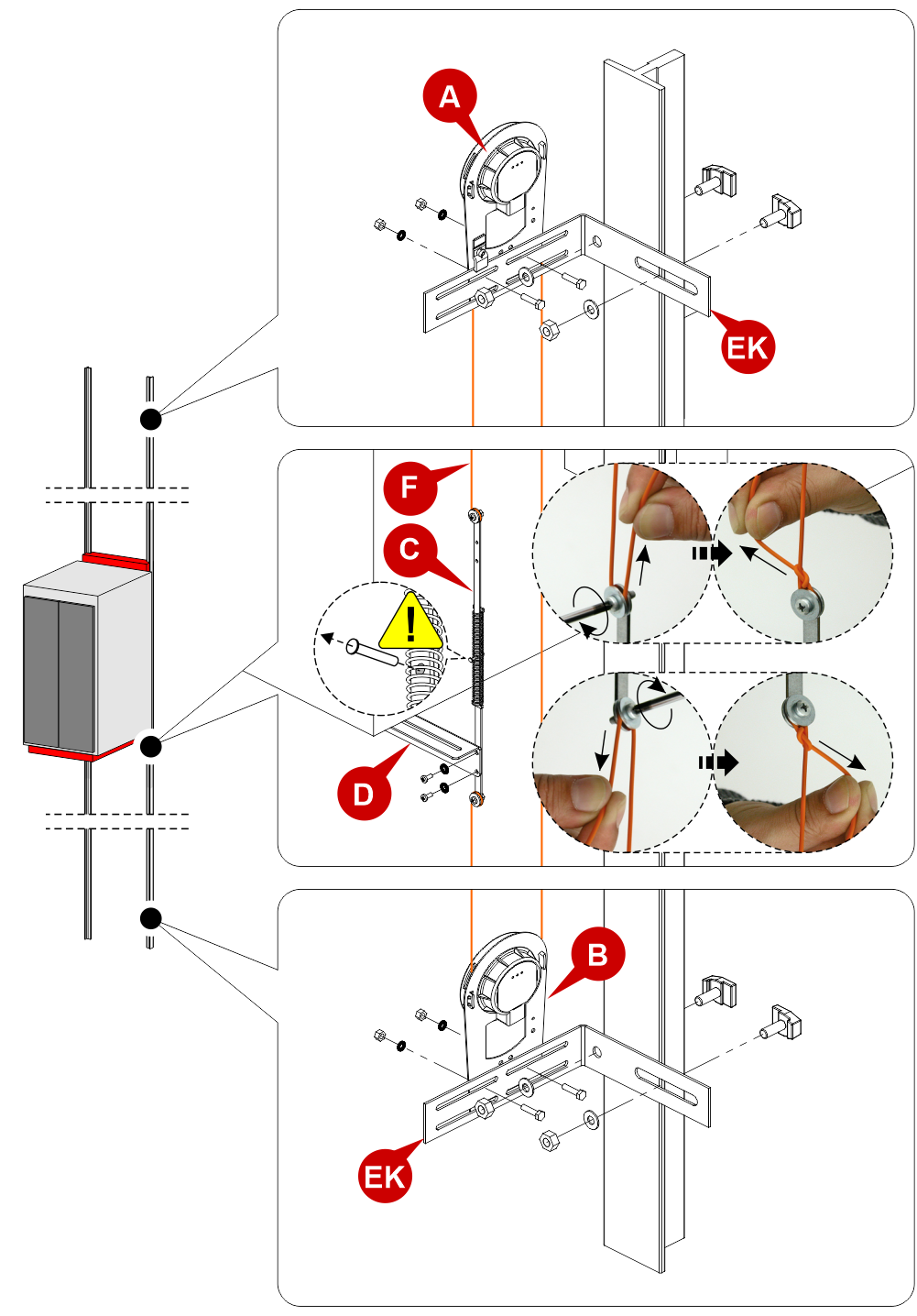
C) – Jousikiristin voidaan tarvittaessa asentaa myös ohjaamon katolle.
![]() Poista pidike vasta, kun asennus on valmis.
Poista pidike vasta, kun asennus on valmis.
Vanhojen järjestelmien vaihdon yhteydessä vanha köysi on irrotettava ja kiristettävä uudelleen uuden enkooderin asennuksen jälkeen.
Johdotukset
Yhteys Pitagora 4.0 -ohjaimeen
– Alkaen laiteohjelmistoversiosta 3.0.2 –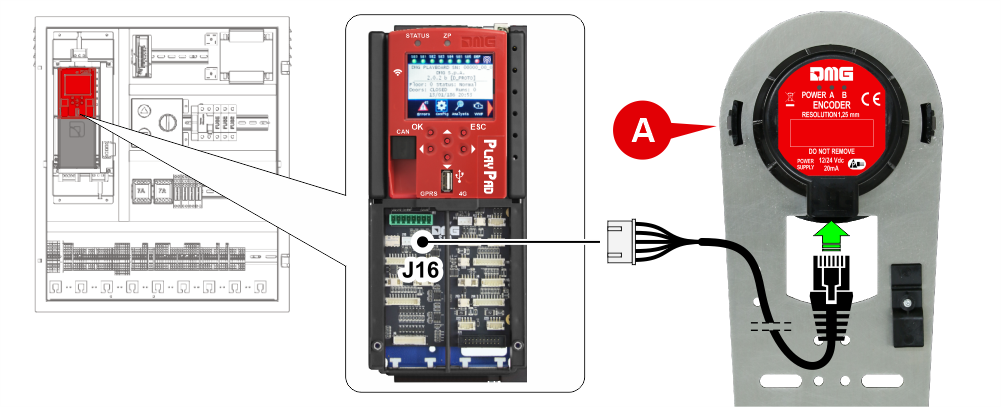 A) – Enkooderi, jonka resoluutio on 1,25 mm
A) – Enkooderi, jonka resoluutio on 1,25 mm
– Firmware-versioon 3.0.1 asti –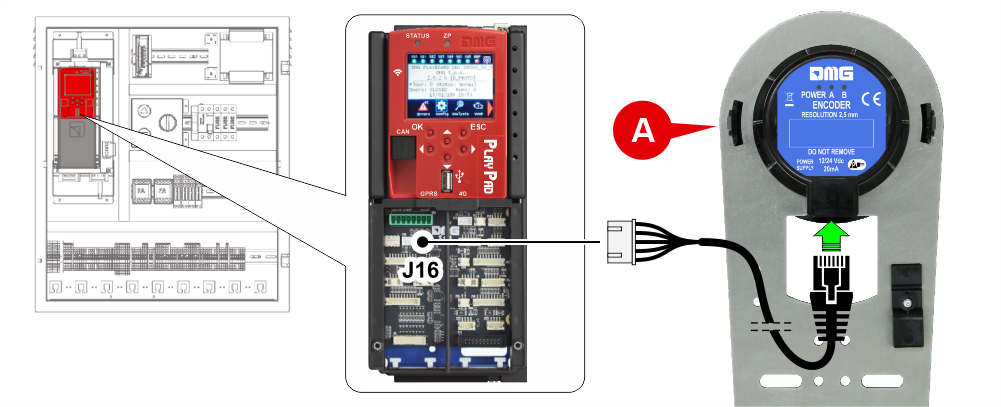 A) – Enkooderi, jonka resoluutio on 2,50 mm
A) – Enkooderi, jonka resoluutio on 2,50 mm
Yhteys olemassa oleviin MUSA / PLAYBOARD V3 -ohjaimiin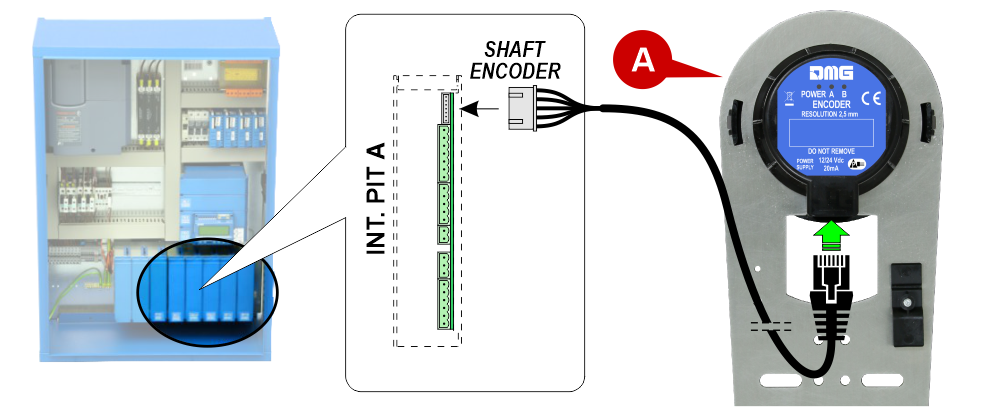
A) – Enkooderi, jonka resoluutio on 2,50 mm
Voit korvata nykyisen köysikooderin uudella magneettikooderilla (2,50 mm:n tarkkuus).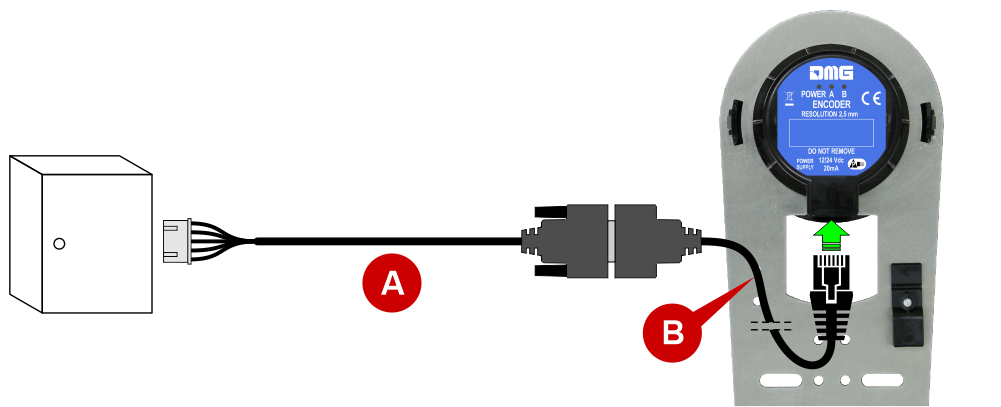
Jätä olemassa oleva kaapeli (A) paikalleen ja liitä se uuteen enkooderiin sovitinkaapelilla (B).
Enkooderin vaihdon jälkeen tarkista:
- Oikea pyörimissuunta tarkastustilassa (ylösliike, lisäys millimetreinä, alaspäin liike, vähennys millimetreinä). Muuta tarvittaessa pyörimissuuntaa ohjaimesta seuraavien ohjeiden mukaisesti:
- Aseta paneeli väliaikaiseen käyttöön (Asetukset-valikko -> Väliaikaiset toiminnot -> Kyllä);
- Muuta pyörimissuuntaa valikossa Järjestelmän sijainti -> Paikannusjärjestelmä -> myötäpäivään/vastapäivään kiertävä enkooderi;
- Poista väliaikaiset toiminnot (Asetukset-valikko -> Väliaikaiset toiminnot -> Ei).
- Tarkista auton oikea kohdistus kaikilla kerroksilla. Säädä tarvittaessa pysähtymistarkkuutta ohjaimesta valikosta Järjestelmän sijainti -> Kerroksen sijainti.
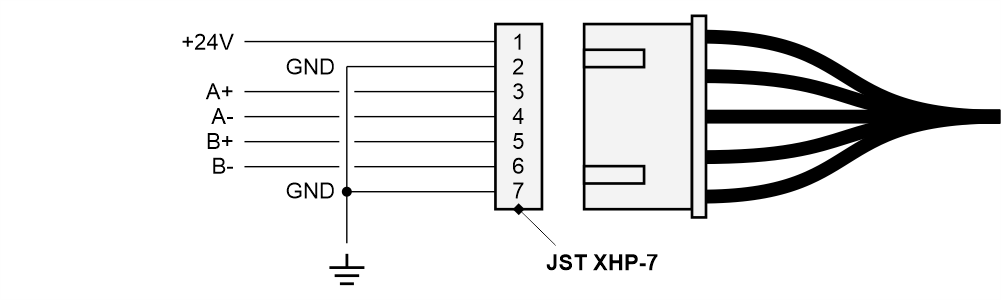
PIN OUT JST 7-napainen liitin
Diagnostiikka-LED

POWER: Jos LED-merkkivalo palaa, enkooderi on kytketty virtalähteeseen.
A/B: Enkooderin lähtöjen tila. Kun hissikori on paikallaan, näiden LED-merkkivalojen tila ei muutu (ne voivat olla sekä päällä että pois päältä); kun hissikori on liikkeessä, molemmat LED-merkkivalot palavat.
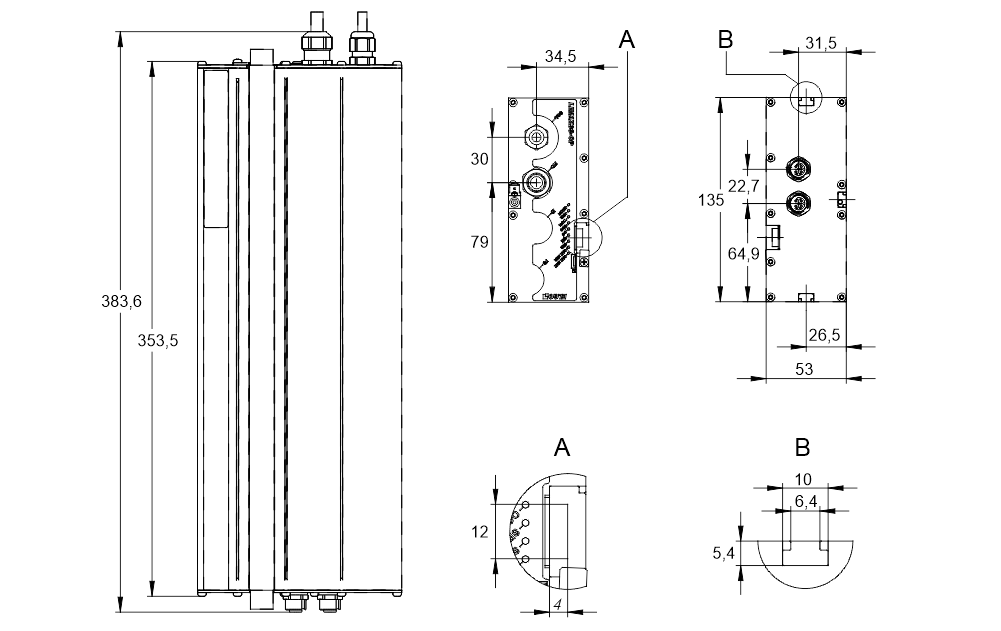
Absoluuttinen enkooderi (ELGO LIMAX 33 CP)
Absoluuttisen enkooderin avulla voit korvata kaikki hissikuilun sisällä olevat turvakoskettimet. Hissikopion sijainti tunnistetaan magneettisen nauhan avulla.
Asennus
Mitat:
Järjestelmän komponentit
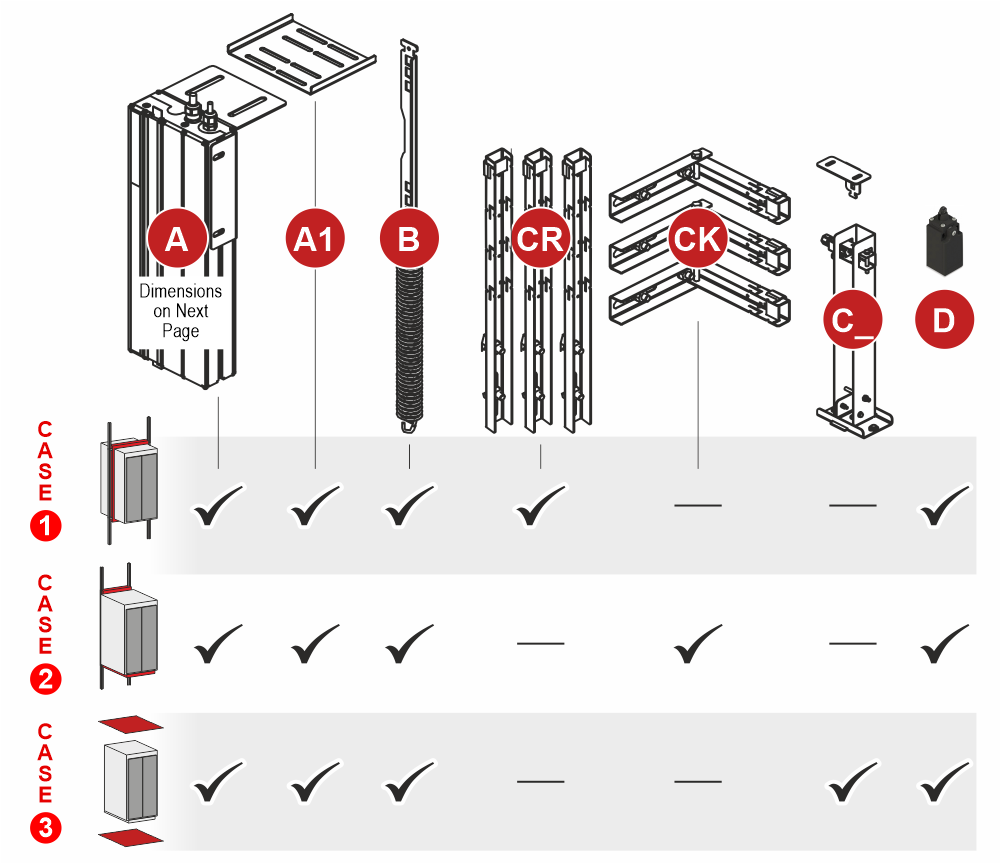
Tapaus 1: Kehysmekaniikalla varustetut hissit
Tapaus 2: Rinkkamekaniikalla varustetut hissit
Tapaus 3: Kiinnitys lattiaan ja kattoon
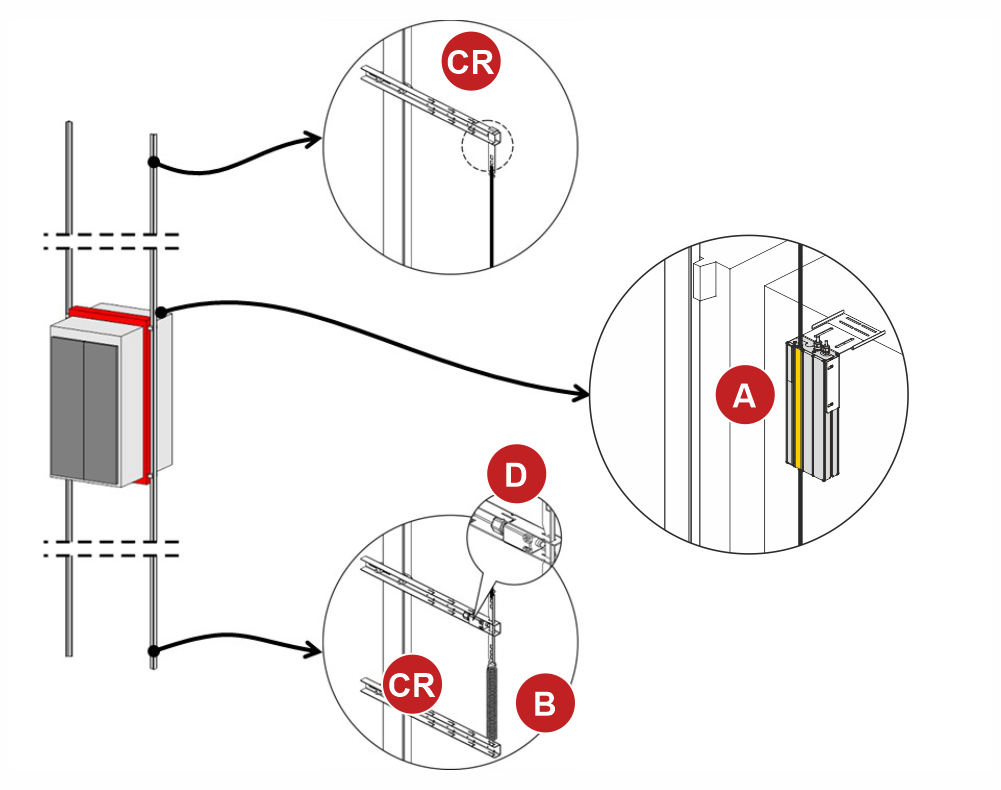
Asennus
Tapaus 1 – Kehysmekaniikalla varustetut hissit
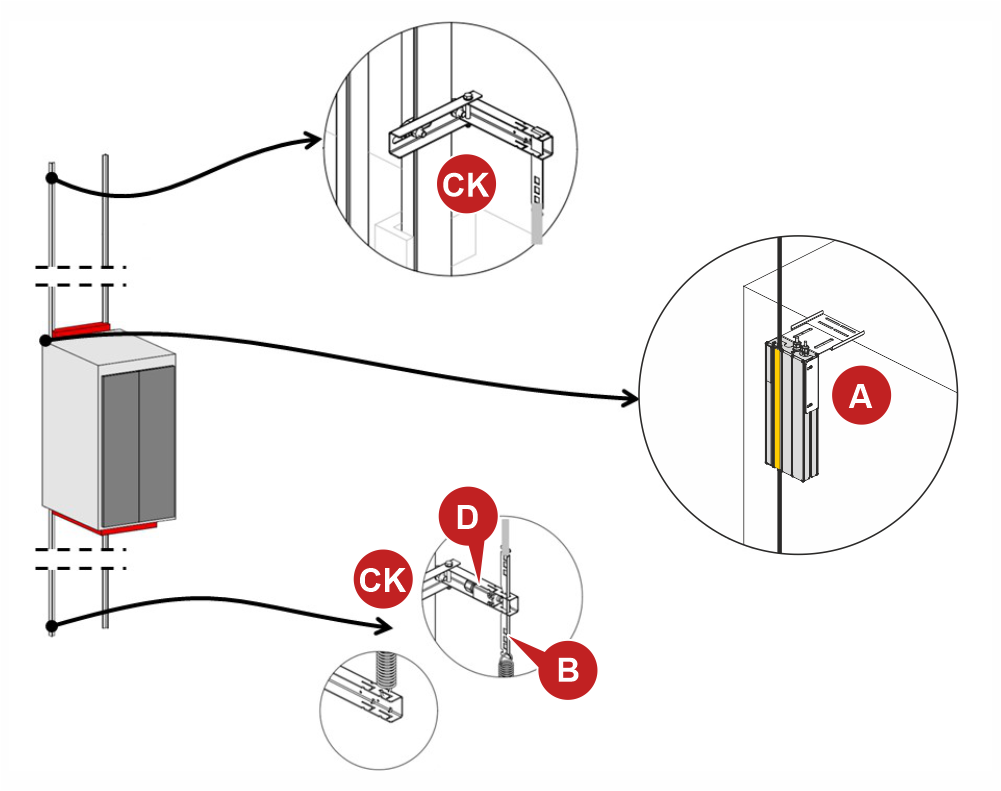
Tapaus 2 – Hissit, joissa on reppumekanismi
Tapaus 3 – Kiinnitys lattiaan ja kattoon

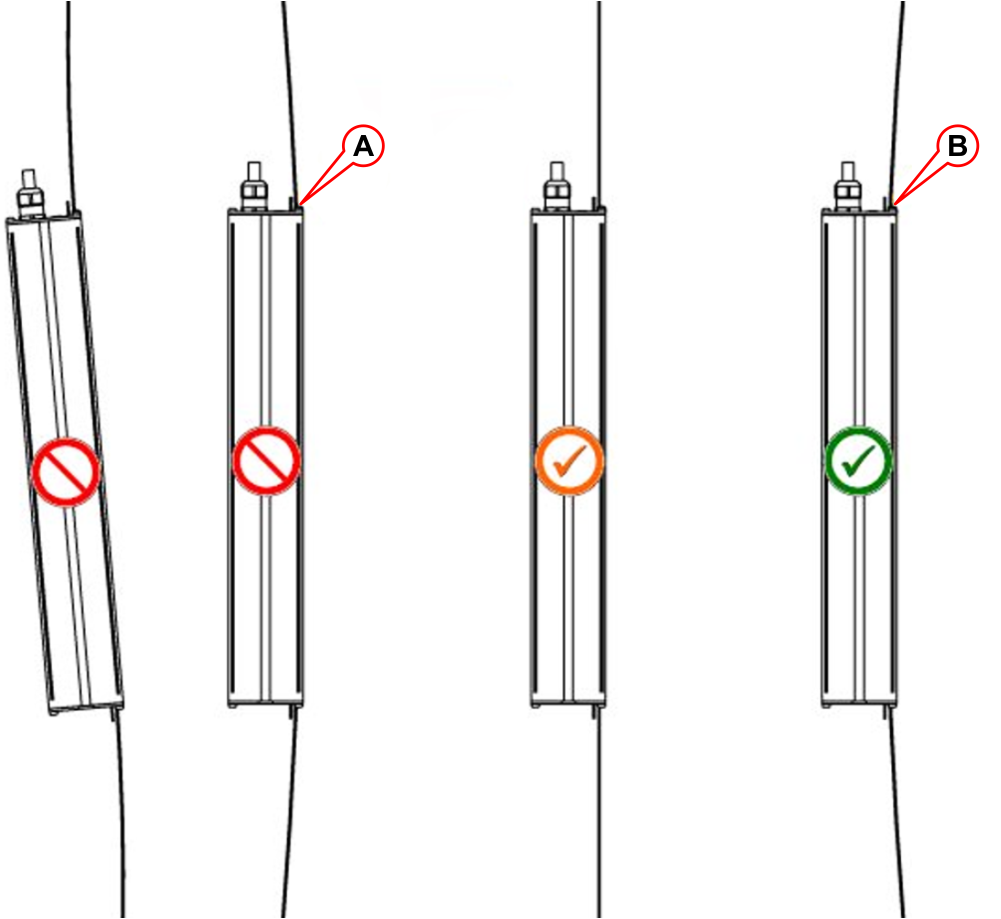
Aseta magneettijuova huolellisesti alla olevien kuvien mukaisesti.
Magneettinauhan oikea sijoitus![]() Poista kaikki magneetit lokerosta ennen magneettinauhan asentamista.
Poista kaikki magneetit lokerosta ennen magneettinauhan asentamista.
Älä asenna magneettinauhaa lähelle kestomagneettimoottoreita.
Älä käytä magnetoituja työkaluja magneettinauhan lähellä.
Älä käytä hitsauslaitteita magneettinauhan lähellä.
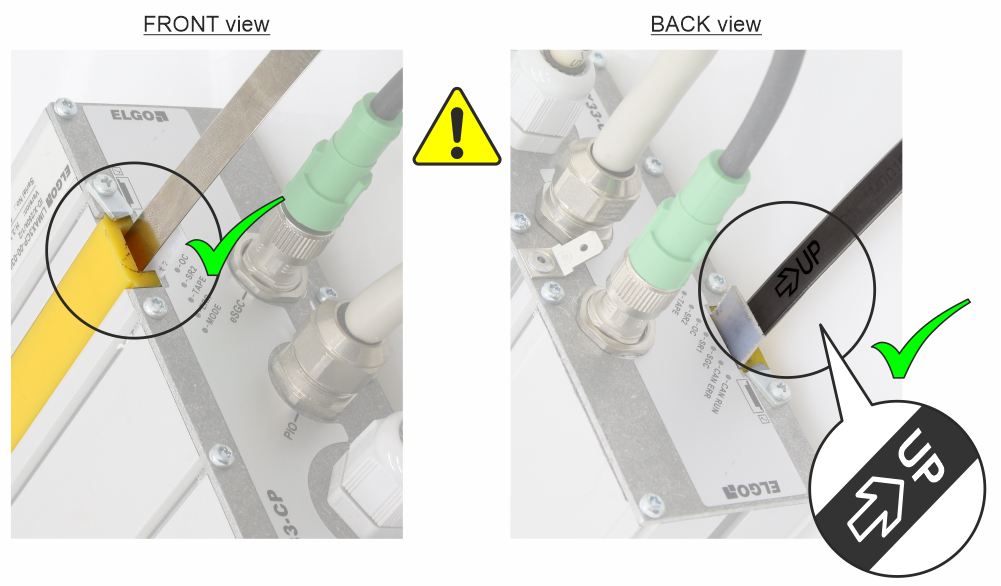
Noudata nauhassa esitettyjä asennusohjeita ja varmista, että se on oikeassa asennossa seuraavan kuvan mukaisesti:
A) – Teippi koskettaa ohjainta magneettisella puolella.
B) – Teippi koskettaa ohjainta teräksisellä puolella.
LED-merkkivalo laitteessa

| LED | KUVAUS | |
|---|---|---|
| TILA | Normaali tila | Hidas vilkkuminen (1 s) |
| Käyttöönottotila | Nopea vilkkuminen (0,1 s) | |
| Opetustila | Valot pysyvästi | |
| VIRHE | Ei virhettä | LED pois päältä |
| Yleinen virhe | LED päällä | |
| Hätätilannevirhe | Vilkkuva | |
| TAPE | Magneettinauhaa ei havaittu | LED päällä |
| eSGC | eSGC Yhteystiedot sulje | LED päällä |
| eSGC Yhteystiedot Avoin | LED pois päältä | |
| OC | OC Yhteys sulje | LED päällä |
| OC-yhteys avoinna | LED pois päältä | |
| SR1 | SR1 Yhteys suljettu | LED päällä |
| SR1-kosketin auki | LED pois päältä | |
| SR2 | SR2 Yhteys sulkeutuu | LED päällä |
| SR2-kosketin auki | LED pois päältä | |
| CAN-ERR | Tila CAN Open | LED päällä |
| CAN-RUN | Tila Voidaan avata | LED pois päältä |
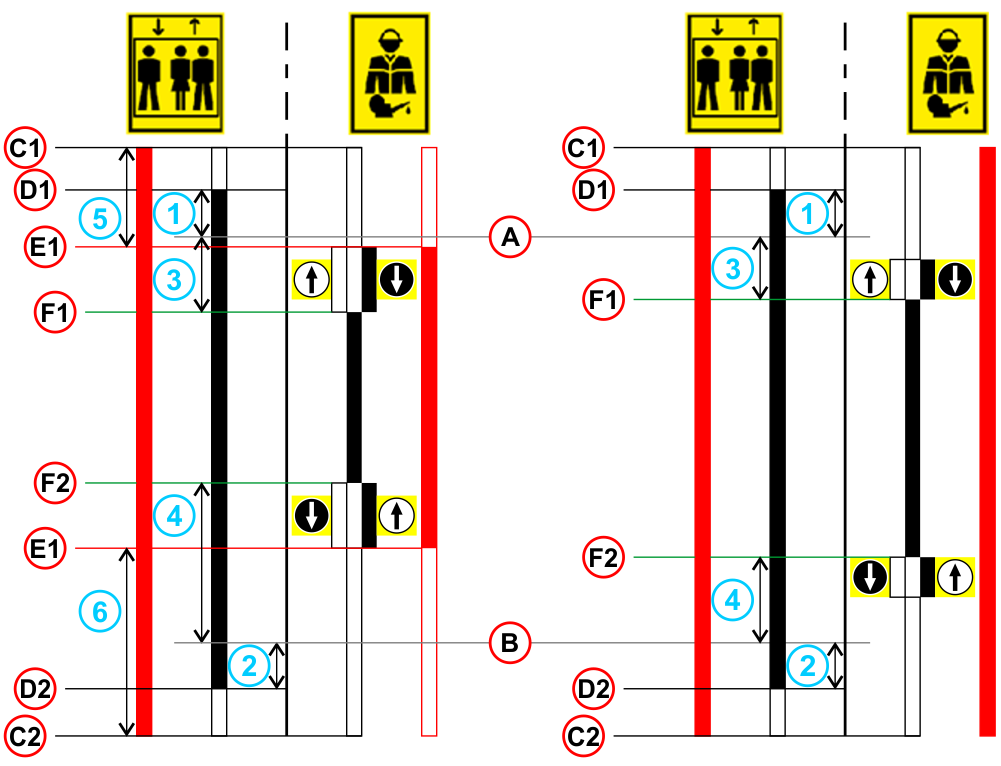
Turvakoskettimien selitys
| Pienennetty pää ja/tai pienennetty PIT-asennus | Riittävä pää- ja kuiluvara EN81-20 §5.2.5.7 / § 5.2.5.8 mukaisesti |
||
|---|---|---|---|
 |
|||
 | Normaali tila | A) - | Ylimmän kerroksen |
 | Tarkastustila | B) - | ALIMMASEEN kerrokseen |
 | Turvakoskettimien tila | C1) - | Yläviiteasento |
| Tarkastus UP-painike | C2) - | Alempi vertailuasento | |
| Tarkastus ALAS-painike | D1) - | Yläraja-asennon lopetuskytkin | |
| Lopulliset rajakytkimet Offset Ylös | D2) - | Alempi lopullinen rajakytkin | |
| Lopulliset rajakytkimet Offset alas | E1) - | Yläosan esilaukaistu pysäytysjärjestelmän raja | |
| Tarkastusrajoitin Offset Ylös | E2) - | Alempi esilaukaistu pysäytysjärjestelmän raja | |
| Tarkastusrajoitinkytkimet Offset alas | F1) - | Yläosan tarkastusrajakytkin | |
| Ennakkoaktivoitu pysäytysjärjestelmä Offset Up | F2) - | Alempi tarkastusrajakytkin | |
| Ennakkoaktivoitu pysäytysjärjestelmä Offset Down | |||
Ilmoitettujen asentojen manuaalinen säätö on mahdollista valikosta. <Positioning> Monitor Encoder (katso taulukko alla).
| Etiketti | Sivu | Kuvaus | |
|---|---|---|---|
| N_LIM_S | 7 | Ylärajan lopullinen kytkimen siirtymä (siirtymä yläkerroksen yläpuolella) | |
| N_LIM_D | 7 | Alemman lopullisen rajakytkimen siirtymä (siirtymä alimman kerroksen alla) | |
| I_LIM_S | 6 | Yläosan tarkastusrajakytkin (siirretty yläkerroksen alle) | |
| I_LIM_D | 6 | Alempi tarkastusrajakytkin (poikkeama pohjakerroksesta) | |
| MATKAT | 8 | Yläosan esilaukaistu pysäytysjärjestelmän raja (yläviiteasennosta) | |
| TRIPD | 8 | Alempi esilaukaistu pysäytysjärjestelmän raja (alhaisemmasta viiteasennosta) |
TRIPS- ja TRIPD-arvoja käytetään vain, jos ELGO on osa turvallisuusjärjestelmää, joka vähentää pää- ja/tai kuopan vaurioita (ELGO + eSGC).
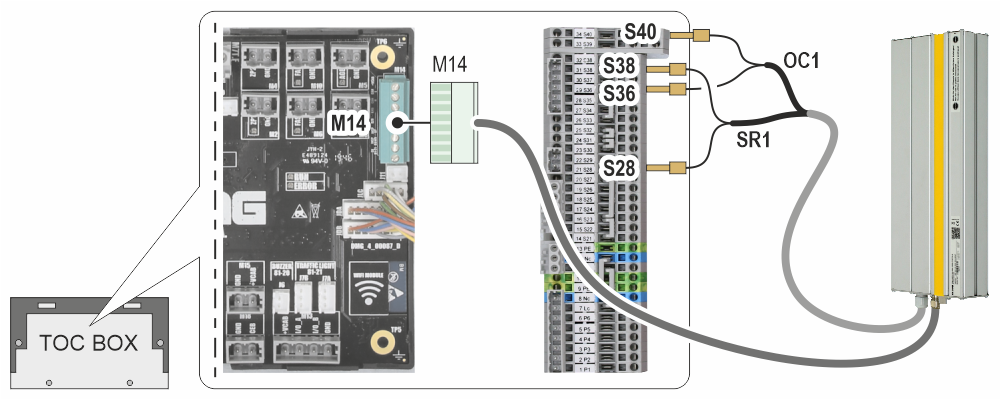
Johdotukset
Yhteys Pitagora 4.0 -ohjaimeen
ELGO-enkooderi on kytketty suoraan TOC-laatikkoon (ohjaamon yläosassa).
Video-opas
englanti
italian kieli