
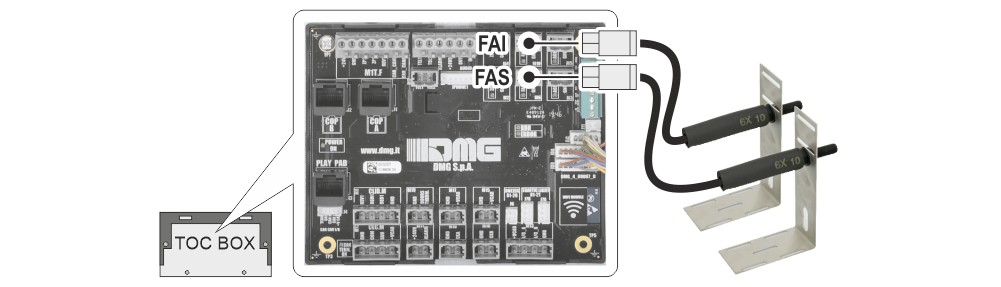
Магнитные считыватели (FAI / FAS)
Эта система подсчета состоит из двух магнитных считывателей (FAI-FAS) с нормально разомкнутым контактом, установленных на двух кронштейнах в верхней части кабины, и набора магнитов, расположенных на рельсах лифта.
Эта система подсчета может использоваться, если характеристики системы соответствуют следующим условиям:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Установка

Случай A: Лифты с рамочной механикой
Случай B: Лифты с механикой типа «рюкзак»
Аксессуары для особых случаев
Размещение магнитов на направляющих лифта
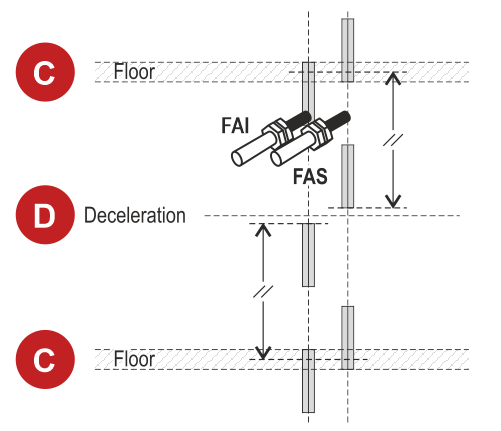
C) Этажи
D) Замедление
Проводка
Магнитные считыватели подключаются непосредственно к блоку TOC (в верхней части кабины).
Энкодер двигателя
Эта система подсчета может использоваться только в системах со скоростью ниже 2 м/с и без маневров с открытыми дверями; она подходит только для следующих дополнительных плат для бесредукторных двигателей с замкнутыми системами:
OPC-PR Q40.SCLSC – Энкодер Sin Cos
OPC-PS Q40.SCLFL – Энкодер En Dat
OPC-PSH Q40.SCLSCH – Энкодер Sin Cos+Hiperface
Контроллер обрабатывает сигналы, передаваемые платами OPC, преобразуя импульсы в счет.
Точность этой системы подсчета составляет примерно 1 миллиметр.

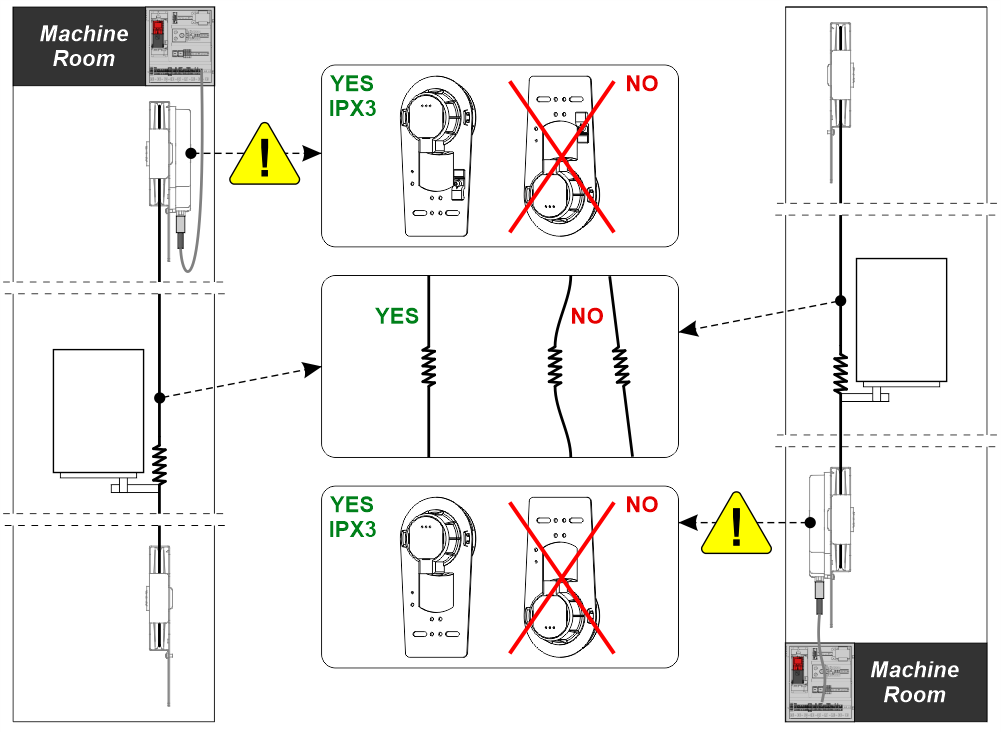
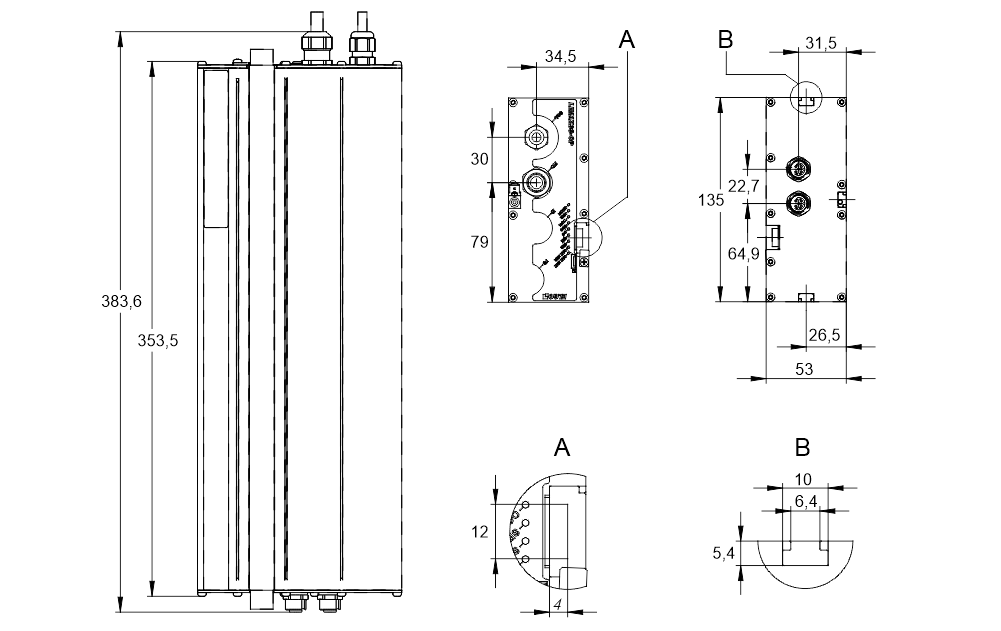
Магнитный энкодер DMG с тросом
Новый магнитный энкодер DMG использует датчик для определения вращения и положения магнита, установленного на оси шкива энкодера. Генерируемые импульсы принимаются и обрабатываются панелью управления лифтом, которая рассчитывает положение, направление и скорость кабины.
Установка
Советы и предупреждения
Шкив, в который встроен энкодер, должен быть установлен в верхней части вала или в яме, рядом с машинным залом.
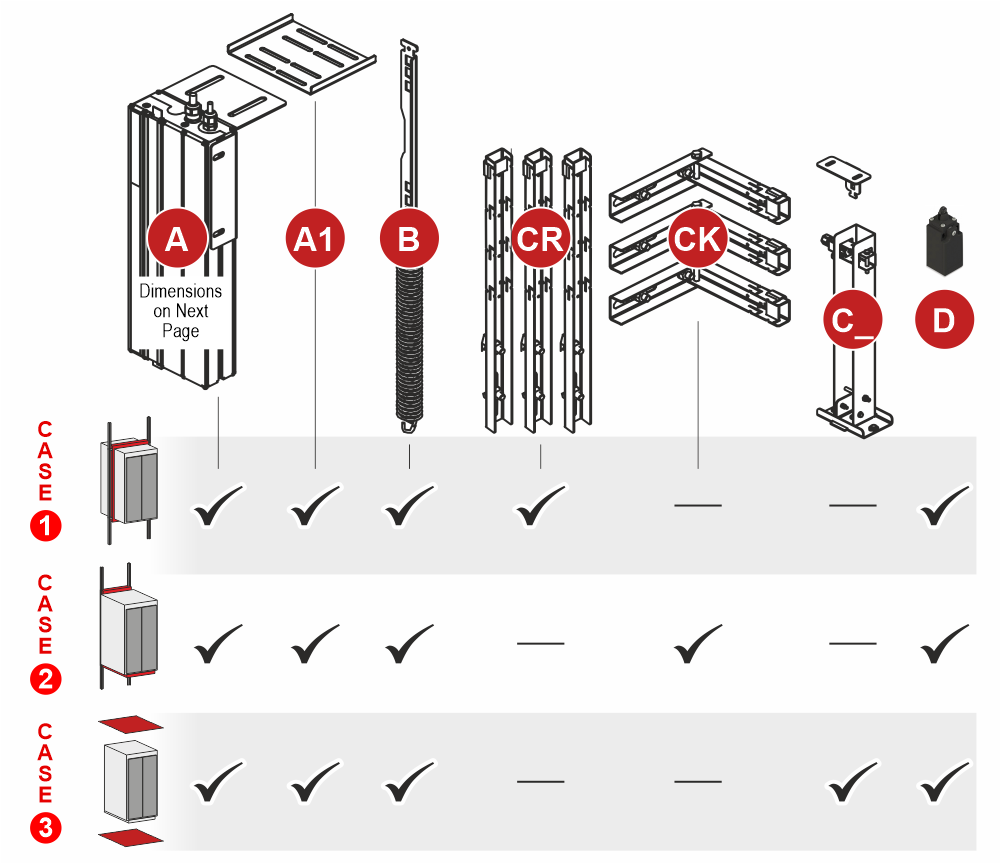
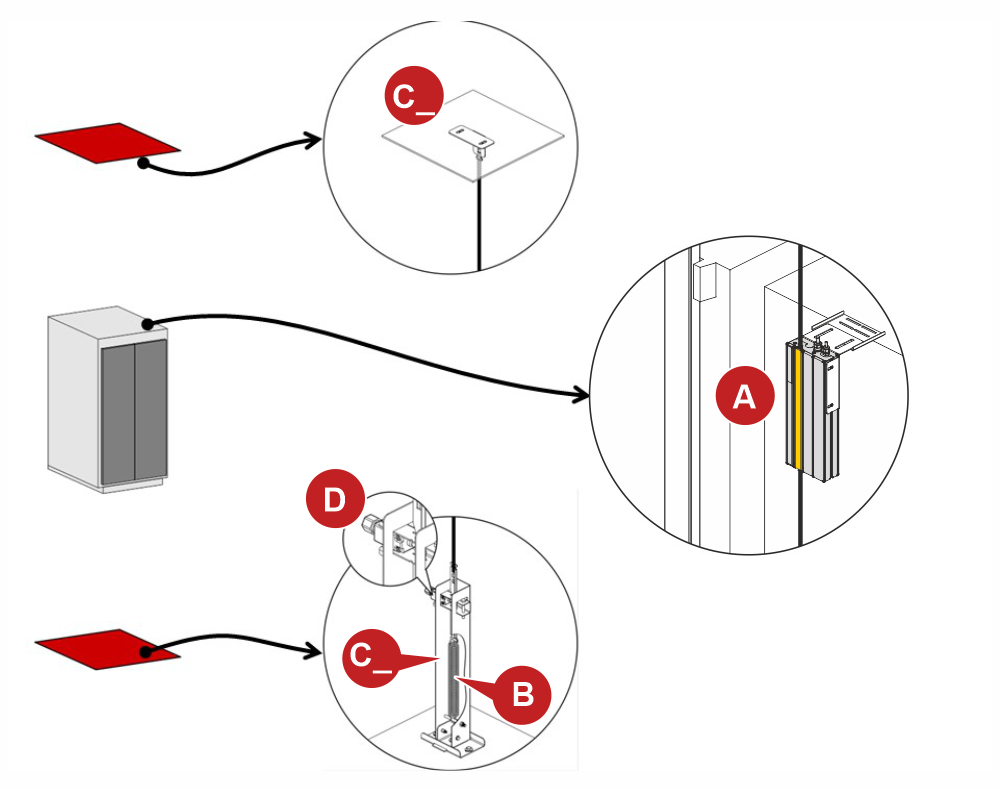
Компоненты системы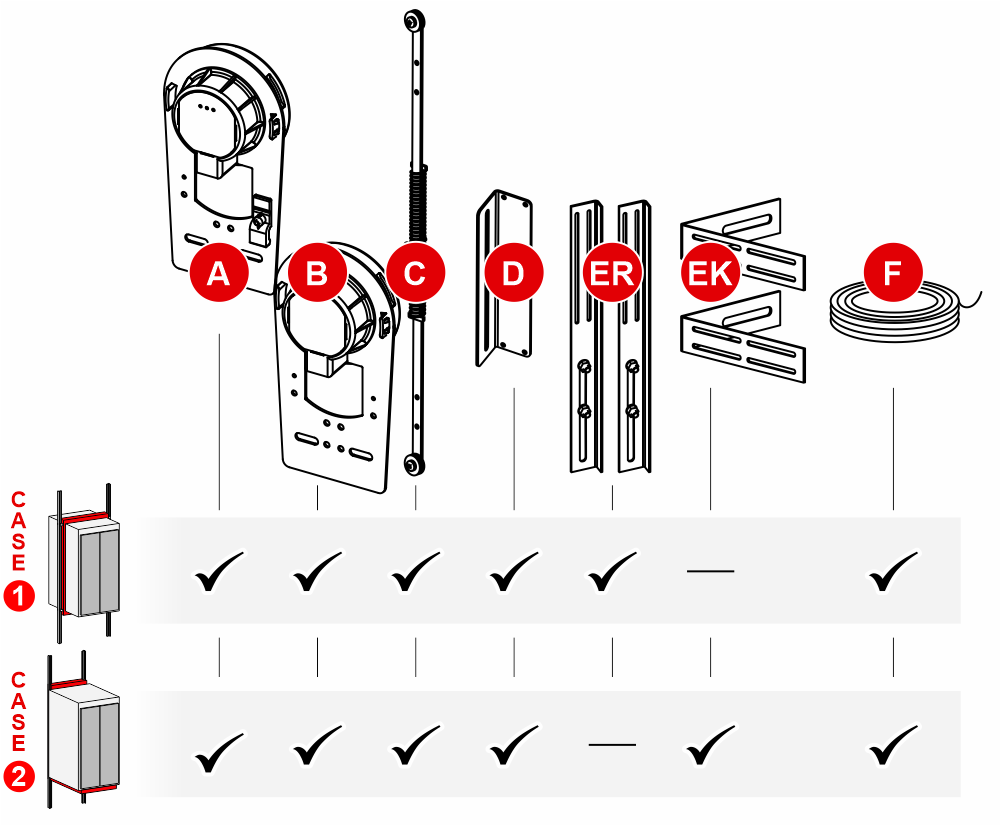
Случай 1: Лифты с каркасной механикой
Случай 2: Лифты с механикой типа «рюкзак»
A) – Это шкив энкодера, в котором находится электронная плата. Он может иметь 2 разрешения:
– 1,25 мм (100 PPR) для энкодера с красной маркировкой: для использования с контроллером Pitagora 4.0, начиная с версии прошивки 3.0.2
– 2,5 мм (50 PPR) для энкодера с синей маркировкой: для использования с контроллерами V3 / Musa / Pitagora 4.0 до версии прошивки Y
C) – При необходимости пружинный натяжитель также можно установить на верхней части кабины.
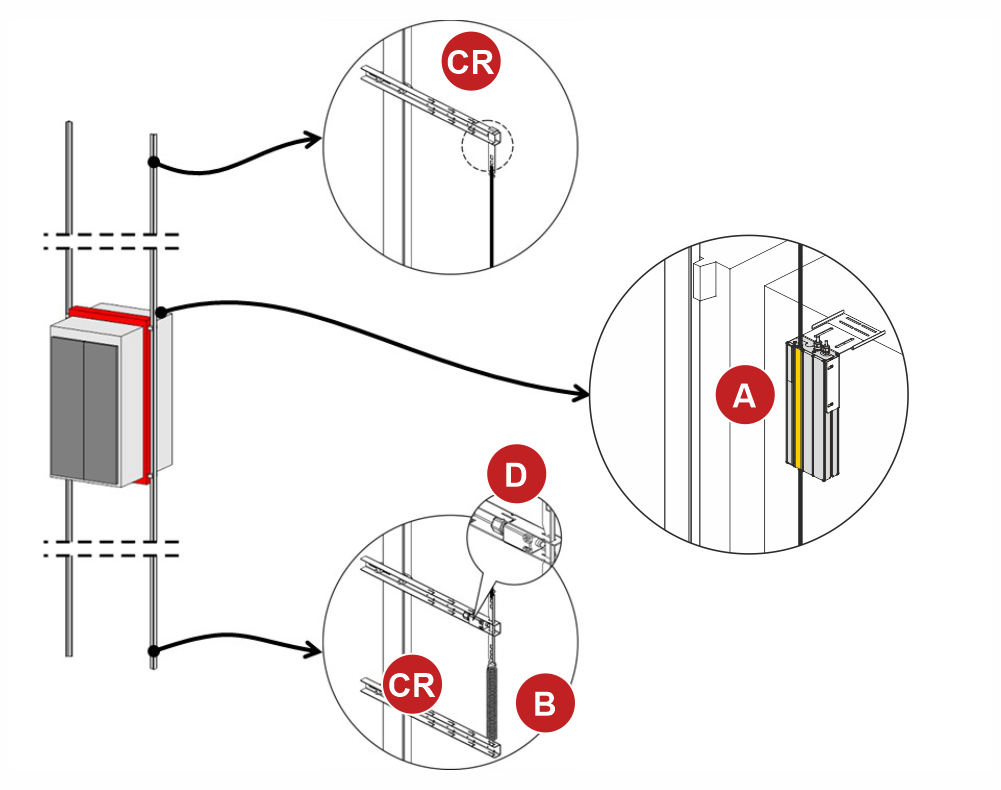
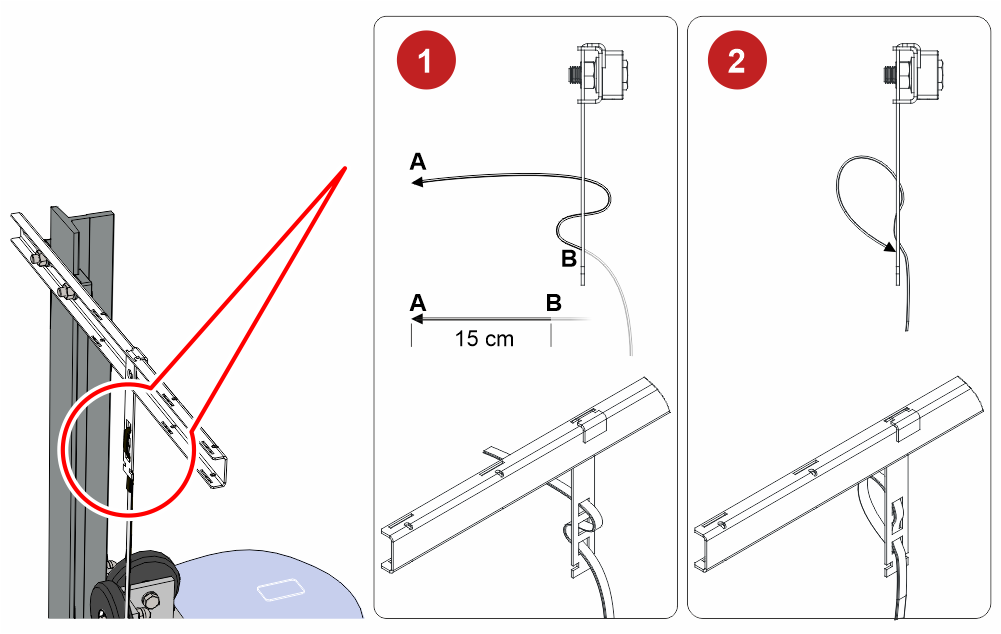
Монтаж
Монтаж зависит от механики установки.
Пример 1 – Лифты с рамочной механикой
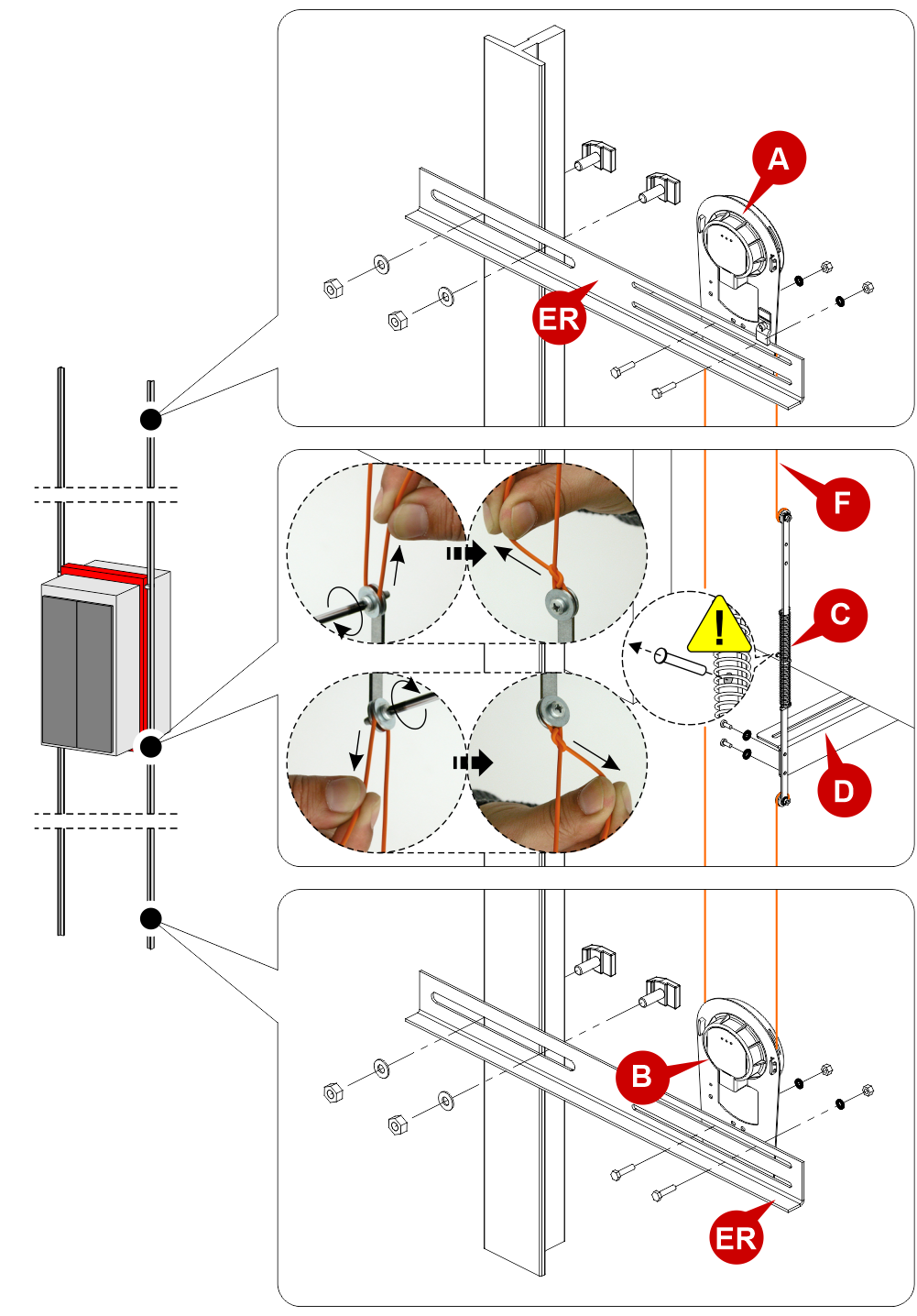
C) – Пружинный натяжитель также может быть установлен на верхней части кабины, если это необходимо.
![]() Снимайте фиксатор только после завершения установки.
Снимайте фиксатор только после завершения установки.
В случае замены на старых системах необходимо будет отвязать старую веревку и повторно натянуть ее после сборки нового датчика.
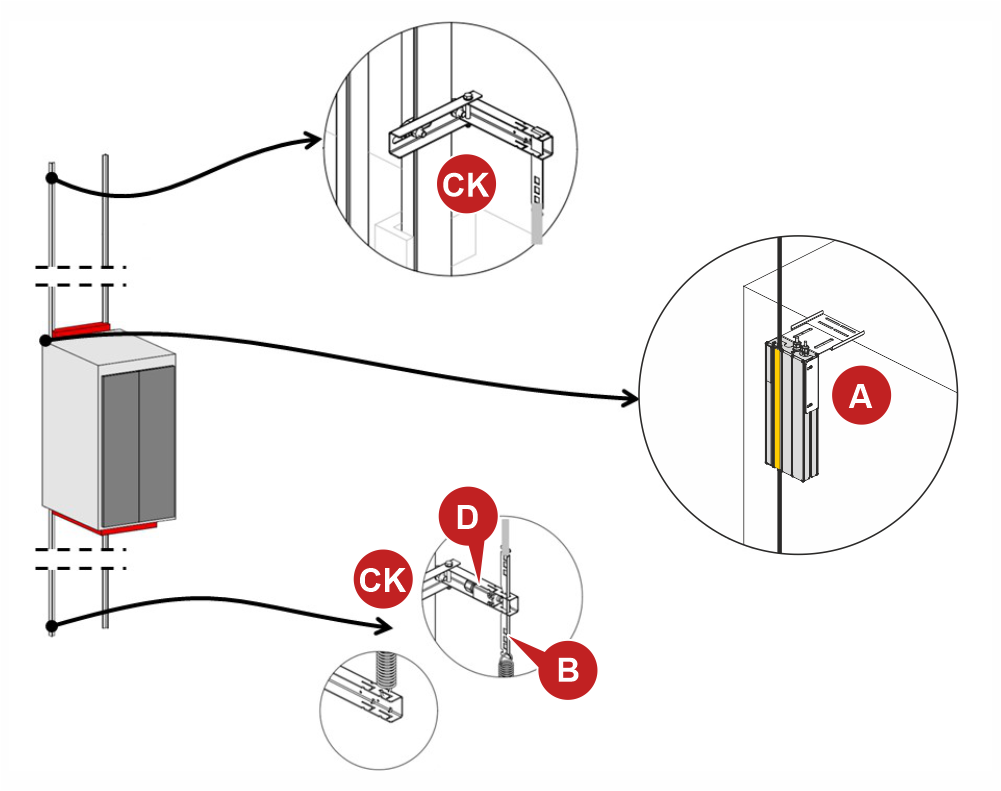
Случай 2 – Лифты с механикой типа «рюкзак»
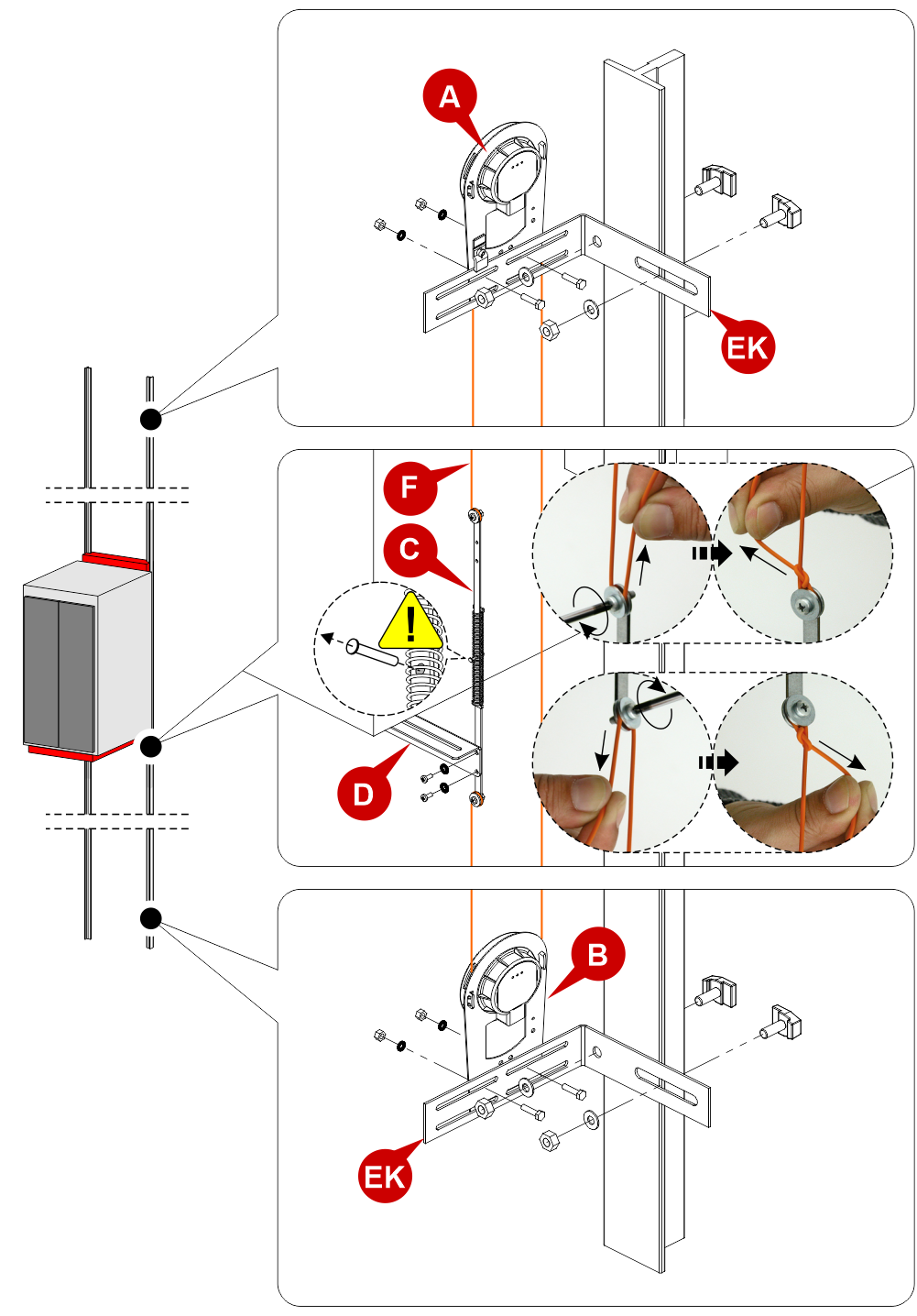
C) – Пружинный натяжитель также может быть установлен на верхней части кабины, если это необходимо.
![]() Снимайте фиксатор только после завершения установки.
Снимайте фиксатор только после завершения установки.
В случае замены на старых системах необходимо будет отвязать старую веревку и повторно натянуть ее после сборки нового датчика.
Проводка
Подключение к контроллеру Pitagora 4.0
– Начиная с версии прошивки 3.0.2 –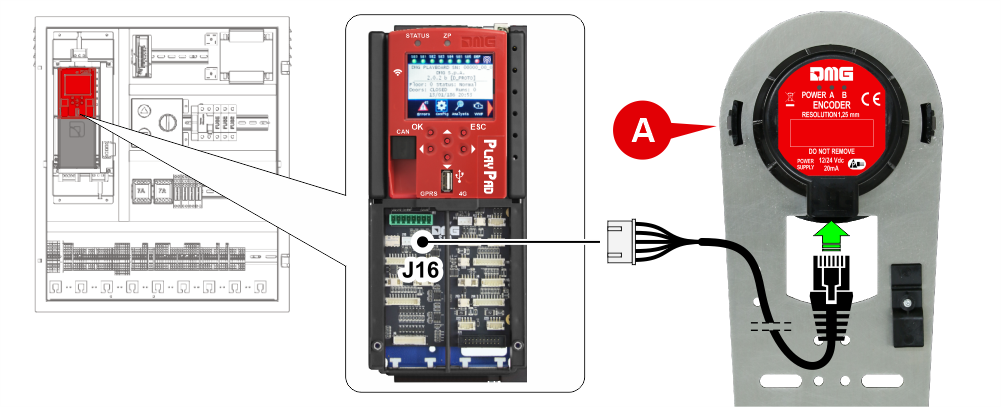 A) – Энкодер с разрешением 1,25 мм
A) – Энкодер с разрешением 1,25 мм
– До версии прошивки 3.0.1 –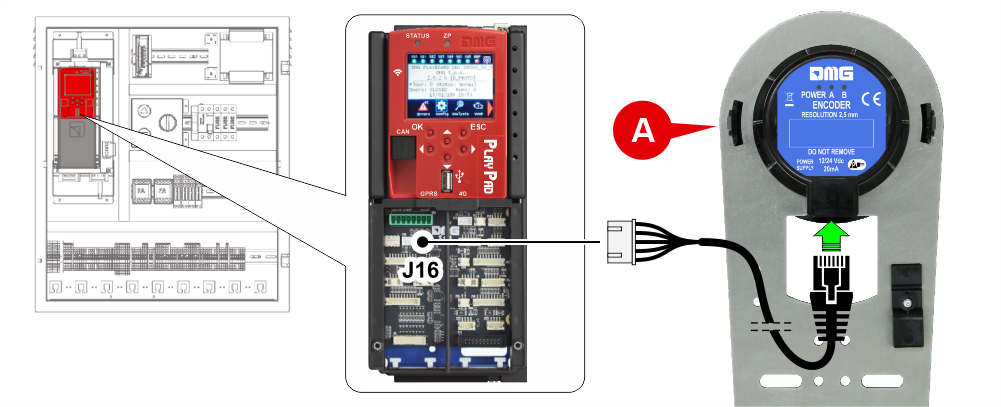 A) – Энкодер с разрешением 2,50 мм
A) – Энкодер с разрешением 2,50 мм
Подключение к существующим контроллерам MUSA / PLAYBOARD V3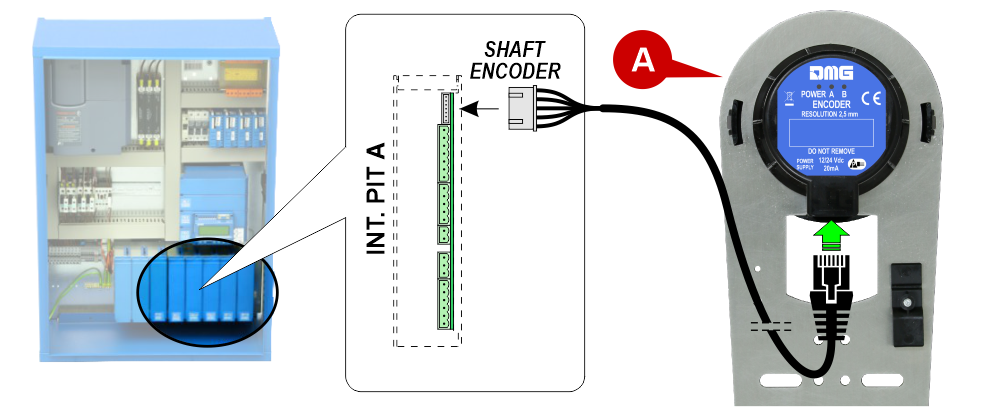
A) – Энкодер с разрешением 2,50 мм
Вы можете заменить существующий тросовый энкодер новым магнитным энкодером (разрешение 2,50 мм).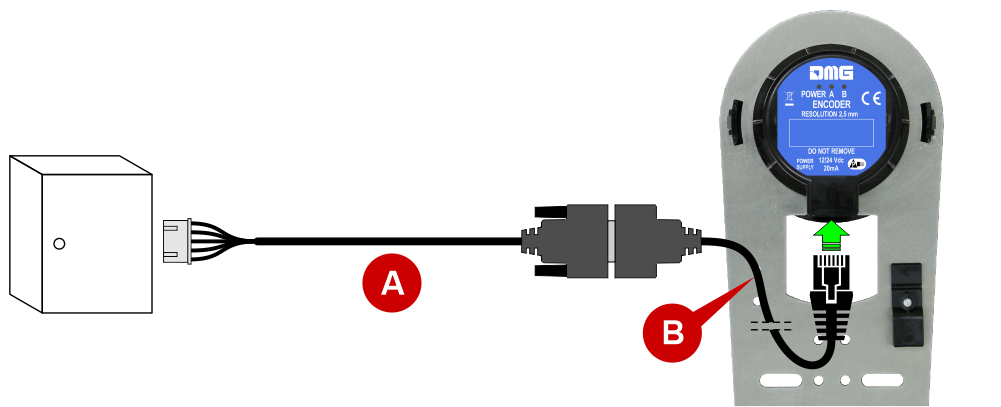
Просто оставьте существующий кабель (A) и подключите его к новому энкодеру с помощью переходного кабеля (B).
После замены датчика проверьте:
- Правильное направление вращения в режиме проверки (движение вверх, увеличение в мм, движение вниз, уменьшение в мм). При необходимости измените направление вращения с помощью контроллера, следуя этим инструкциям:
- Установите панель в «Временные операции» (меню «Конфигурация» -> «Временные операции» -> «Да»);
- Измените направление вращения в меню «Система позиционирования» -> «Система позиционирования» -> «Энкодер по часовой стрелке/против часовой стрелки»;
- Удалите временные операции (меню «Конфигурация» -> «Временные операции» -> «Нет»).
- Проверьте правильность выравнивания автомобиля на всех этажах. При необходимости отрегулируйте точность остановки с помощью контроллера в меню «Системное позиционирование» -> Положение этажа.
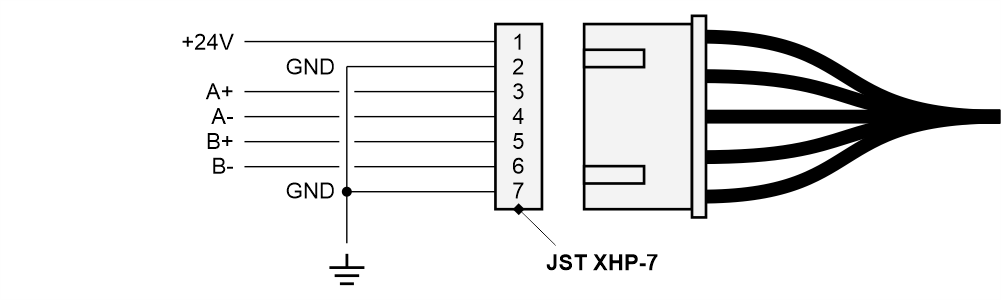
Распиновка 7-контактного разъема JST
Диагностический светодиод

ПИТАНИЕ: Если светодиод горит, датчик питается.
A/B: Состояние выходов датчика. Когда кабина лифта неподвижна, состояние этих светодиодов не изменяется (они могут быть как включенными, так и выключенными); когда кабина лифта движется, оба светодиода будут включены.
Абсолютный энкодер (ELGO LIMAX 33 CP)
Абсолютный энкодер позволяет заменить все предохранительные контакты внутри лифтовой шахты. Положение кабины определяется с помощью магнитной полосы.
Установка
Размеры:
Компоненты системы
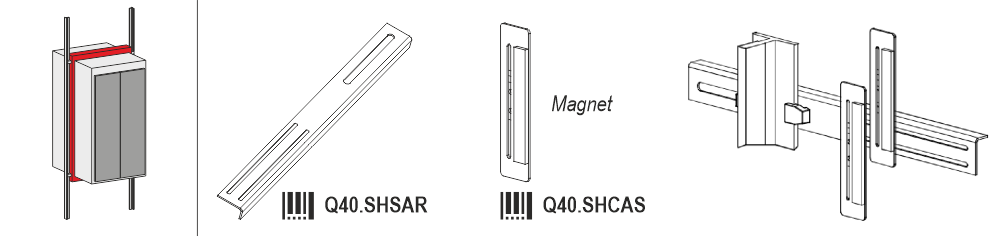
Случай 1: Лифты с рамочной механикой
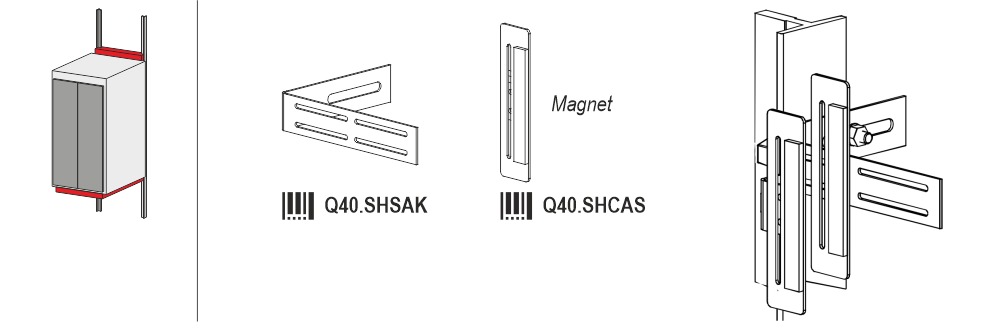
Случай 2: Лифты с механикой типа «рюкзак»
Случай 3: Крепление к полу и потолку
Монтаж
Пример 1 – Лифты с рамочной механикой
Случай 2 – Лифты с механикой типа «рюкзак»
Вариант 3 – Крепление к полу и потолку

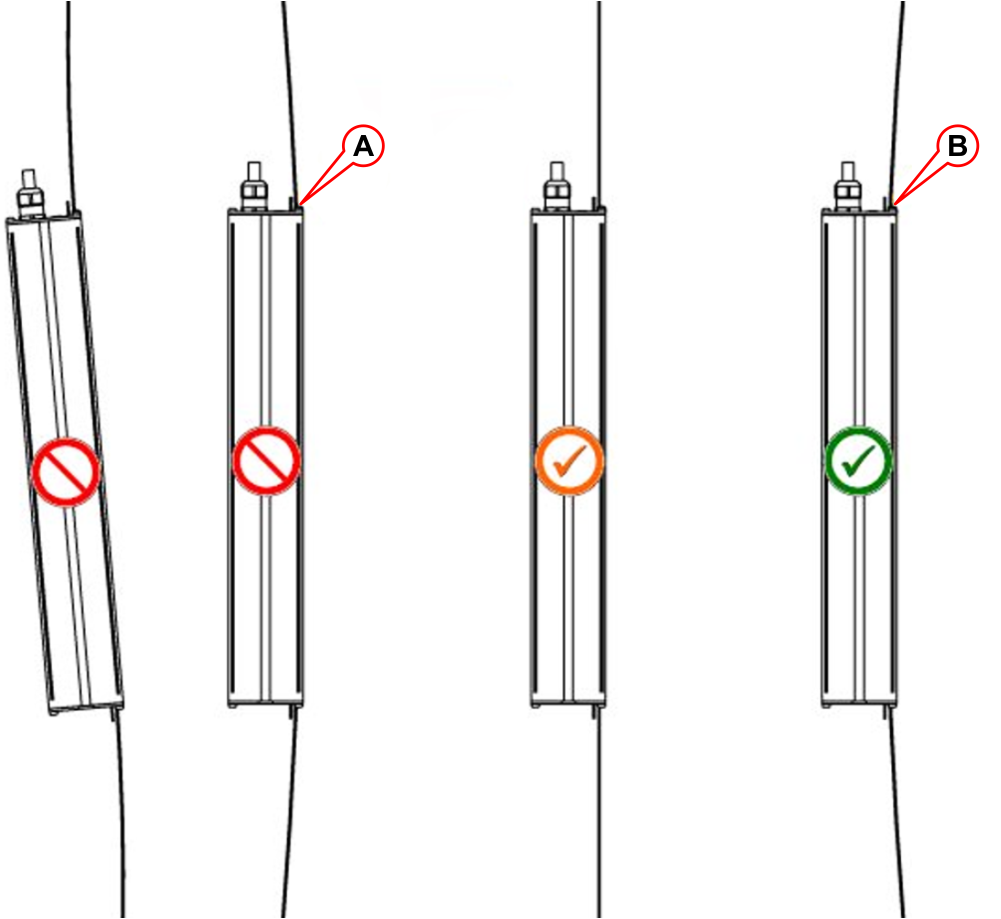
Будьте внимательны при размещении магнитной полосы, как показано на рисунках ниже.
Правильное расположение магнитной ленты![]() Перед установкой магнитной ленты удалите все магниты из отсека.
Перед установкой магнитной ленты удалите все магниты из отсека.
Не устанавливайте магнитную ленту вблизи двигателей с постоянными магнитами.
Не используйте намагниченные инструменты вблизи магнитной ленты.
Не используйте сварочное оборудование вблизи магнитной ленты.
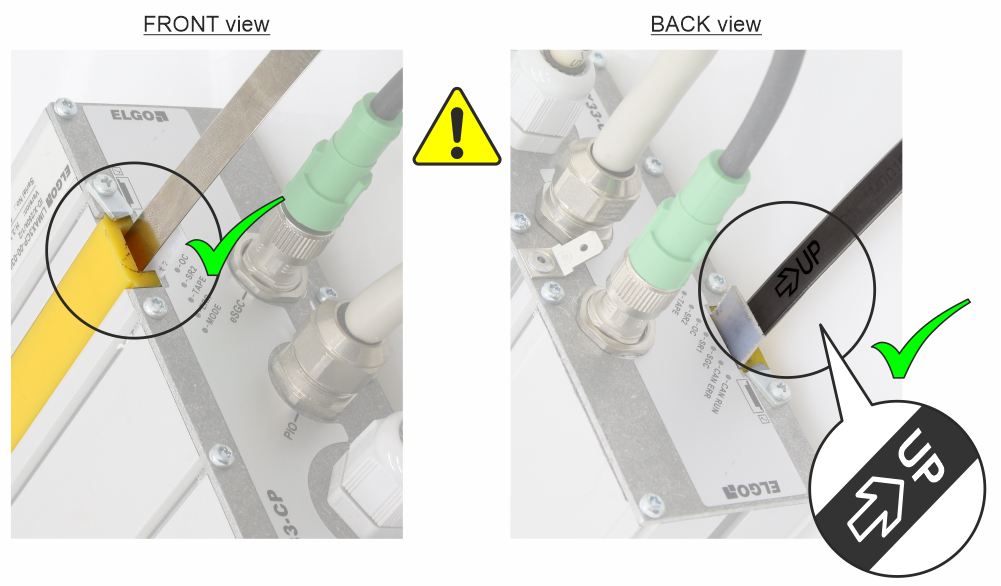
Соблюдайте указания по установке, приведенные на ленте, и убедитесь, что она находится в правильном положении, показанном на следующем рисунке:
A) – Лента соприкасается с направляющей магнитной стороной.
B) – Лента соприкасается с направляющей стальной стороной.
Светодиодный сигнал на устройстве

| светодиод | ОПИСАНИЕ | |
|---|---|---|
| РЕЖИМ | Нормальный режим | Медленное мигание (1 с) |
| Режим предварительного ввода в эксплуатацию | Быстрое мигание (0,1 с) | |
| Режим обучения | Свет постоянно | |
| ОШИБКА | Без ошибок | Светодиод выключен |
| Общая ошибка | Светодиод включен | |
| Чрезвычайная ошибка | Мигание | |
| ЛЕНТА | Магнитная лента не обнаружена | Светодиод включен |
| eSGC | eSGC Контакты закрыть | Светодиод включен |
| eSGC Контакт Открыть | Светодиод выключен | |
| OC | OC Контакт закрыть | Светодиод включен |
| OC Контакт Открыть | Светодиод выключен | |
| SR1 | SR1 Контакт закрыть | Светодиод включен |
| SR1 Контакт открыт | Светодиод выключен | |
| SR2 | SR2 Контакт закрыть | Светодиод включен |
| SR2 Контакт открыт | Светодиод выключен | |
| CAN-ERR | Статус CAN Open | Светодиод включен |
| CAN-RUN | Статус Можно открыть | Светодиод выключен |
Пояснение по контактам безопасности
| Уменьшенная головка и/или уменьшенная установка PIT | Достаточный зазор между головкой и шахтой в соответствии с EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
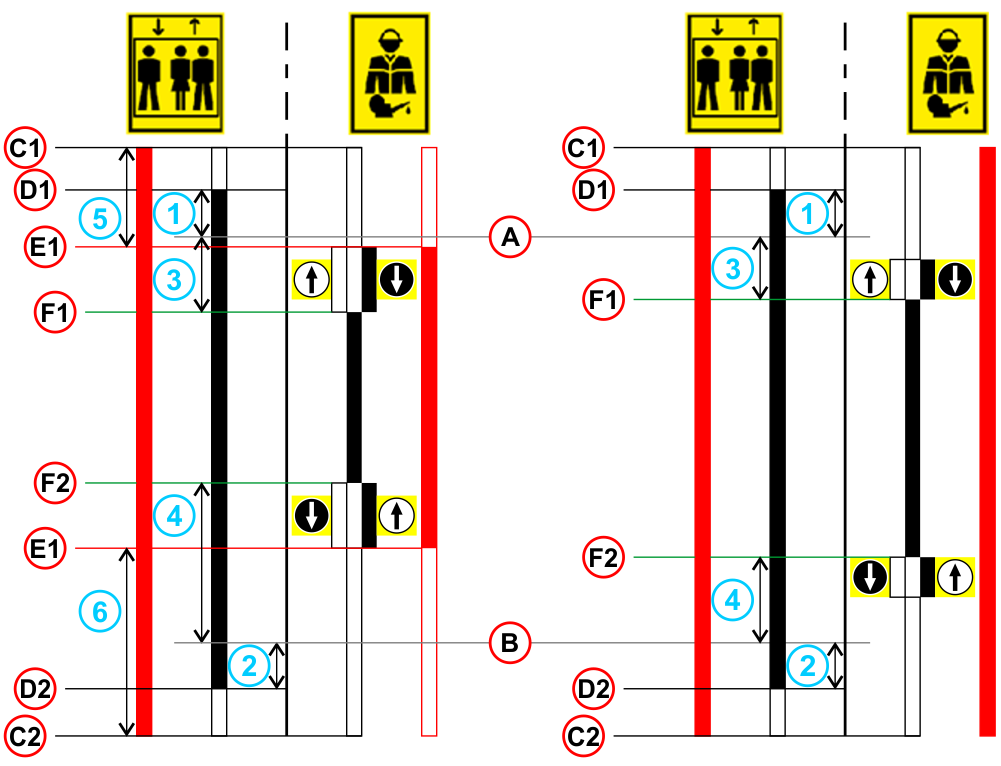 |
|||
 | Нормальный режим | A) - | Верхний этаж |
 | Режим проверки | Б) - | НИЖНИЙ этаж |
 | Состояние контактов безопасности | C1) - | Верхнее положение отсчета |
| Кнопка «Проверка» | C2) - | Нижнее положение упора | |
| Кнопка «Проверка» ВНИЗ | D1) - | Верхний конечный выключатель | |
| Конечные концевые выключатели Смещение вверх | D2) - | Нижний конечный выключатель | |
| Конечные концевые выключатели Смещение вниз | E1) - | Верхний предельный уровень системы остановки с предварительным срабатыванием | |
| Контрольные концевые выключатели Смещение вверх | E2) - | Нижний предельный уровень системы остановки с предварительным срабатыванием | |
| Контрольные концевые выключатели Смещение вниз | F1) - | Верхний контрольный выключатель | |
| Смещение системы предварительного срабатывания торможения вверх | F2) - | Нижний контрольный выключатель | |
| Система предварительного срабатывания торможения с смещением вниз | |||
Для ручной настройки положений указанных возможна из меню <Positioning> Monitor Encoder (см. таблицу ниже).
| Этикетка | Страница | Описание | |
|---|---|---|---|
| N_LIM_S | 7 | Смещение верхнего конечного выключателя (смещение над верхним этажом) | |
| N_LIM_D | 7 | Смещение нижнего конечного выключателя (смещение под нижним полом) | |
| I_LIM_S | 6 | Верхний контрольный выключатель (смещение под верхним этажом) | |
| I_LIM_D | 6 | Нижний контрольный выключатель (смещение над нижним полом) | |
| ТРИПС | 8 | Верхний предельный уровень системы предварительного срабатывания (от верхнего опорного положения) | |
| TRIPD | 8 | Нижний предельный уровень системы предварительного срабатывания торможения (от нижнего опорного положения) |
Значения TRIPS и TRIPD используются только в том случае, если ELGO является частью системы безопасности для уменьшения высоты и/или ямы (ELGO + eSGC).
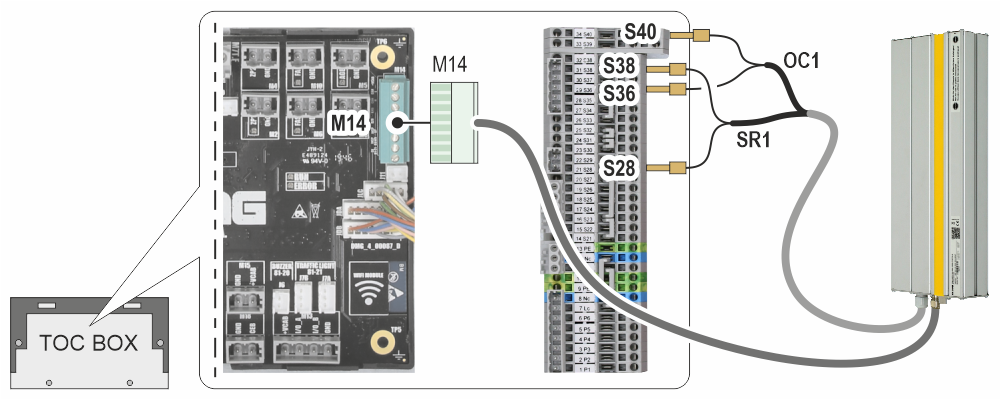
Проводка
Подключение к контроллеру Pitagora 4.0
Энкодер ELGO подключается непосредственно к блоку TOC (в верхней части кабины).
Видеоурок
английский язык
итальянский язык