
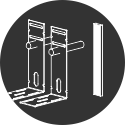
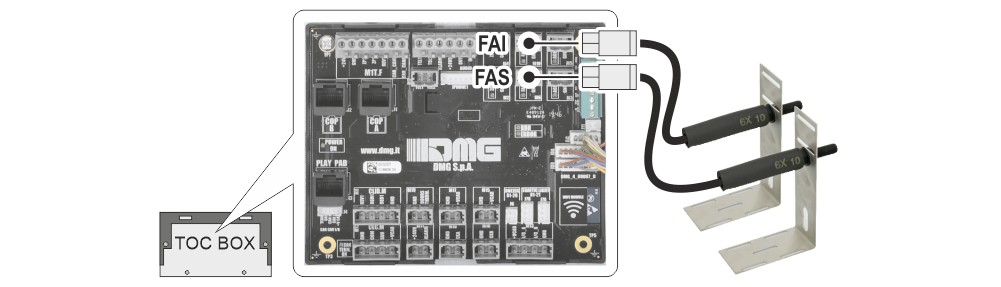
Magnetische lezers (FAI / FAS)
Dit telsysteem bestaat uit twee magnetische lezers (FAI-FAS) met een normaal open contact dat op twee beugels boven aan de cabine is gemonteerd, en een set magneten die op de liftrails zijn geplaatst.
Dit telsysteem kan worden gebruikt wanneer de kenmerken van het systeem aan de volgende voorwaarden voldoen:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Installatie

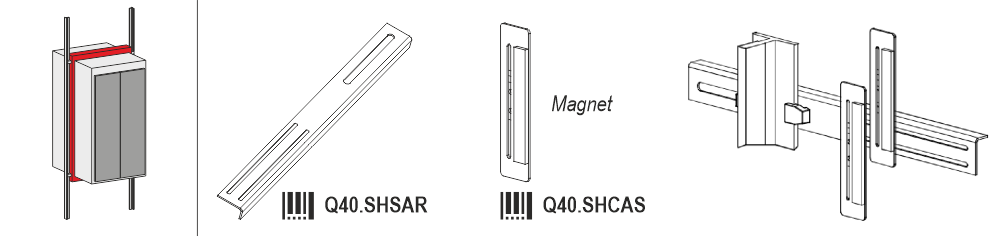
Geval A: Liften met framemechanisme
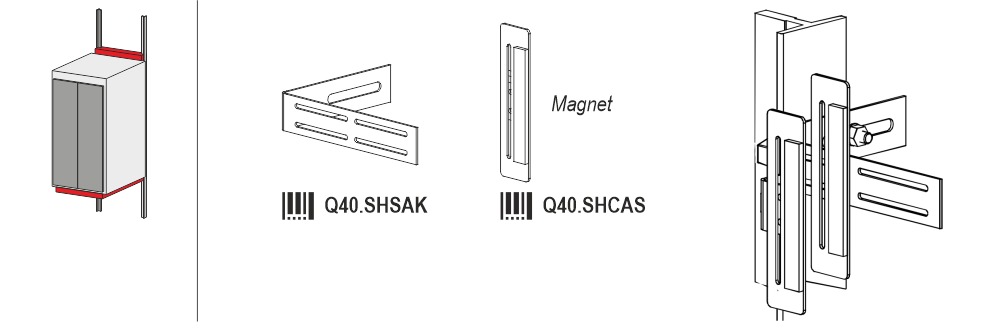
Geval B: Liften met rugzakmechanisme
Accessoires voor speciale gevallen
Magneten op liftgeleiders plaatsen
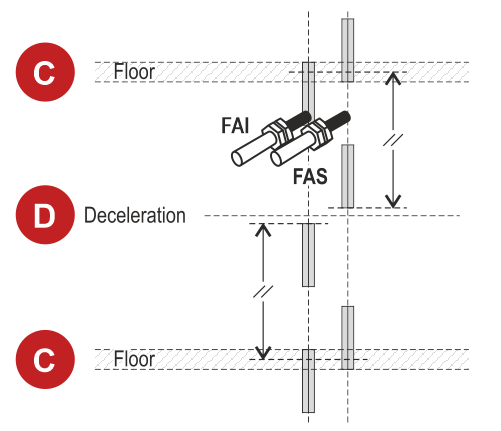
C) Vloeren
D) Vertraging
Bedradingen
De magnetische lezers zijn rechtstreeks aangesloten op de TOC-box (bovenkant cabine).
Motorencoder
Dit telsysteem kan alleen worden gebruikt op systemen met snelheden onder 2 m/s en zonder open-deurmanoeuvres; het is alleen geschikt voor de volgende optionele kaarten voor tandwielloze motoren met gesloten systemen:
OPC-PR Q40.SCLSC – Encoder Sin Cos
OPC-PS Q40.SCLFL – Encoder En Dat
OPC-PSH Q40.SCLSCH – Encoder Sin Cos+Hiperface
De controller verwerkt de signalen die door de OPC-kaarten worden verzonden en zet de pulsen om in een telling.
Dit telsysteem heeft een nauwkeurigheid van ongeveer 1 millimeter.

DMG touwmagnetische encoder
De nieuwe DMG magnetische encoder gebruikt een sensor om de rotatie en positie te detecteren van een magneet die op de as van de encoderpoelie is geplaatst. De gegenereerde pulsen worden ontvangen en verwerkt door het bedieningspaneel van de lift, dat de positie, richting en snelheid van de cabine berekent.
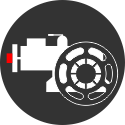
Installatie
Advies en waarschuwingen
De katrol waarin de encoder is ingebouwd, moet boven aan de schacht of in de put worden geïnstalleerd, dicht bij de machinekamer.
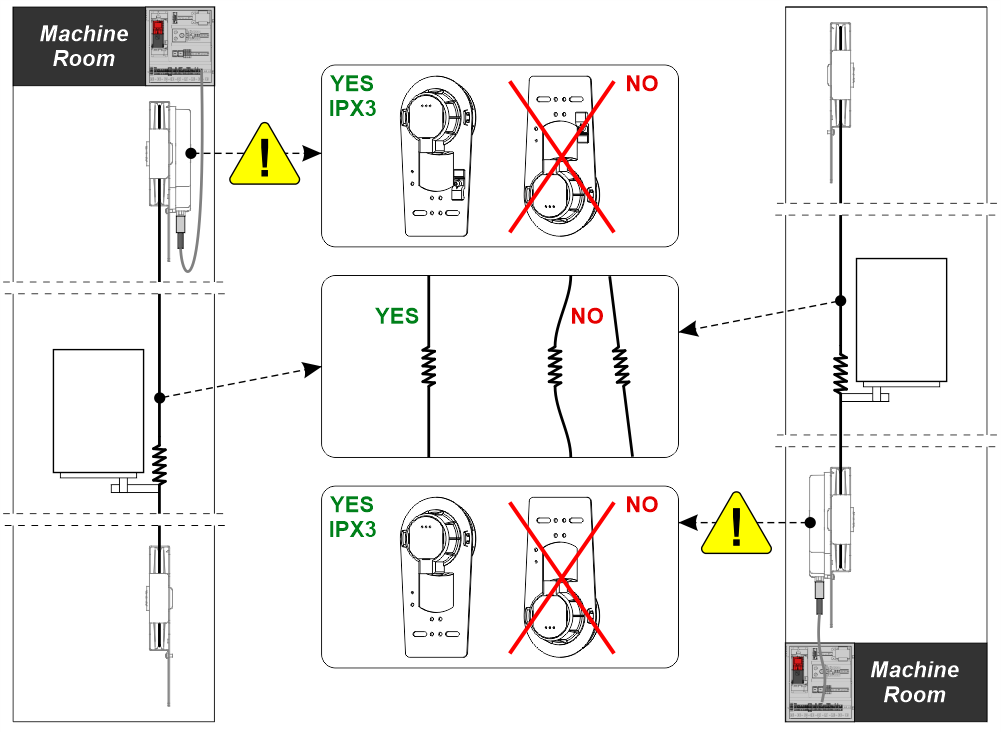
Systeemcomponenten
Geval 1: Liften met framemechanisme
Geval 2: Liften met rugzakmechanisme
A) – Het is de encoderpoelie die de elektronische kaart bevat. Deze kan 2 resoluties hebben:
– 1,25 mm (100 PPR) voor de rood gelabelde encoder: Te gebruiken met de Pitagora 4.0-controller vanaf firmwareversie 3.0.2
– 2,5 mm (50 PPR) voor de blauw gelabelde encoder: Te gebruiken met de V3 / Musa / Pitagora 4.0-controllers tot firmwareversie Y
C) – De veerspanner kan indien nodig ook bovenop de cabine worden gemonteerd.
Montage
De montage is afhankelijk van de mechanica van de installatie.
Geval 1 – Liften met framemechanica
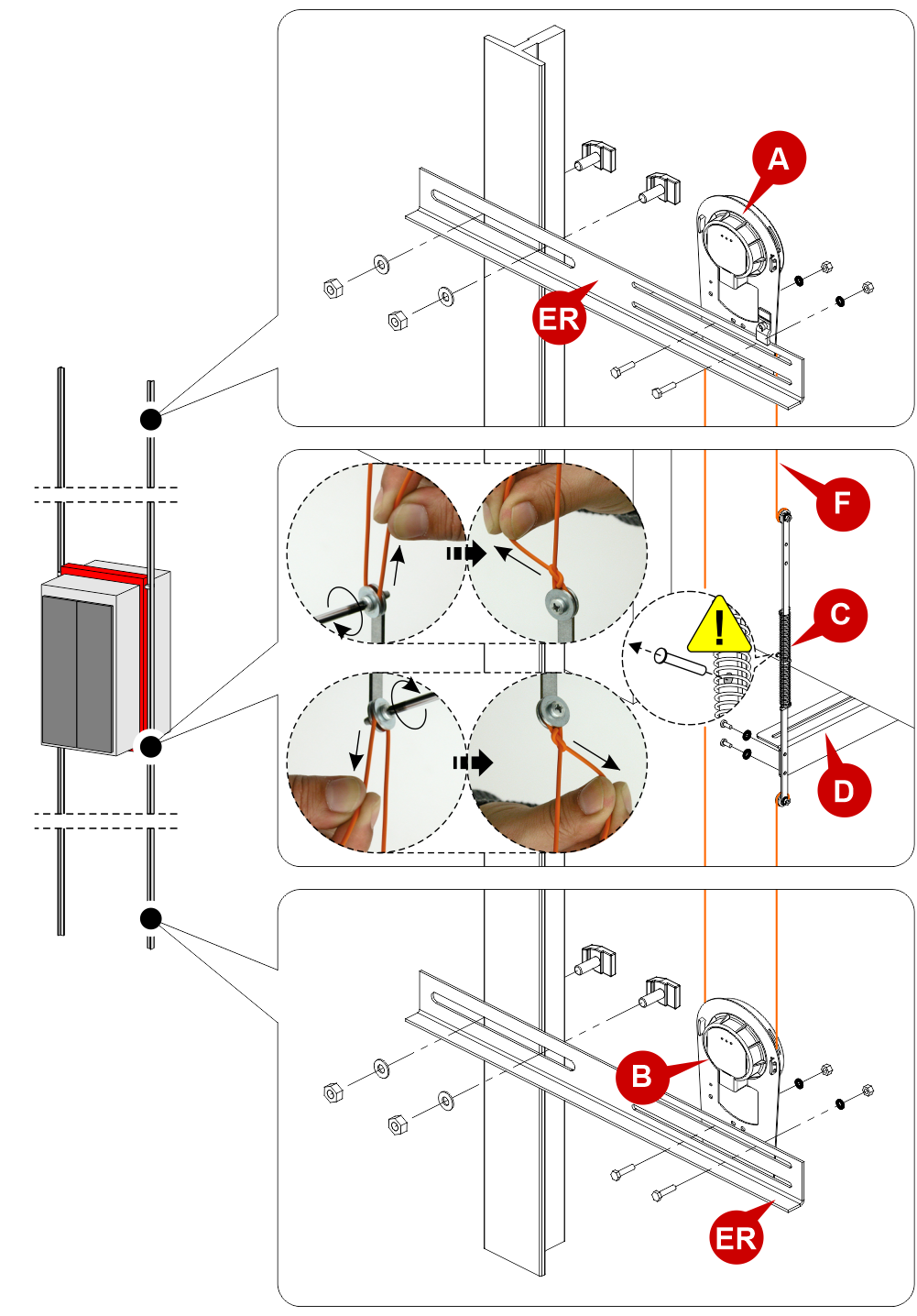
C) – De veerspanner kan indien nodig ook bovenop de cabine worden gemonteerd.
![]() Verwijder de klem pas nadat de installatie is voltooid.
Verwijder de klem pas nadat de installatie is voltooid.
Bij vervanging op oude systemen moet het oude touw worden losgemaakt en opnieuw worden gespannen nadat de nieuwe encoder is gemonteerd.
Geval 2 – Liften met rugzakmechanisme
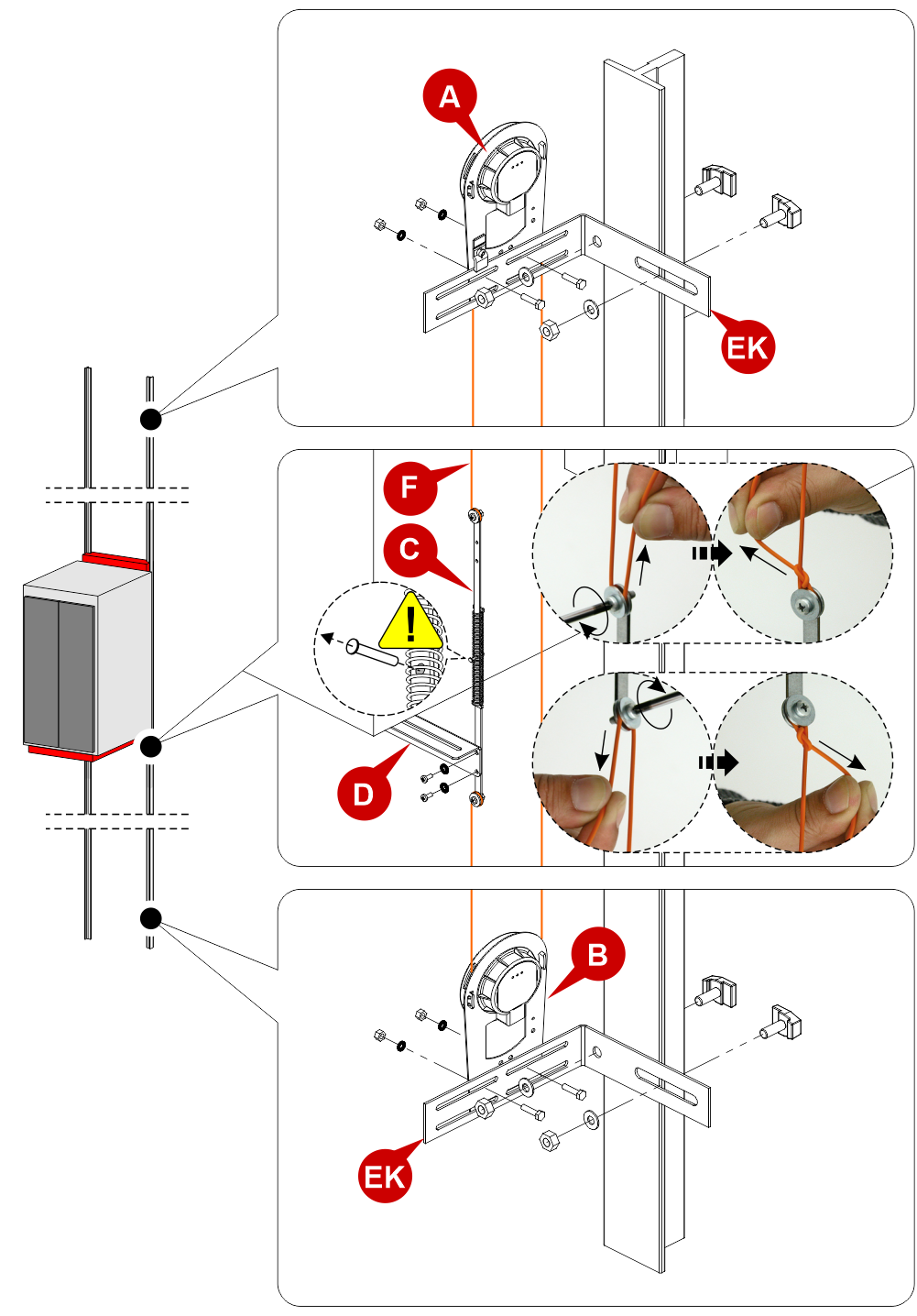
C) – De veerspanner kan indien nodig ook bovenop de cabine worden gemonteerd.
![]() Verwijder de klem pas nadat de installatie is voltooid.
Verwijder de klem pas nadat de installatie is voltooid.
Bij vervanging op oude systemen moet het oude touw worden losgemaakt en opnieuw worden gespannen nadat de nieuwe encoder is gemonteerd.
Bedradingen
Aansluiting op Pitagora 4.0-controller
– Vanaf firmwareversie 3.0.2 –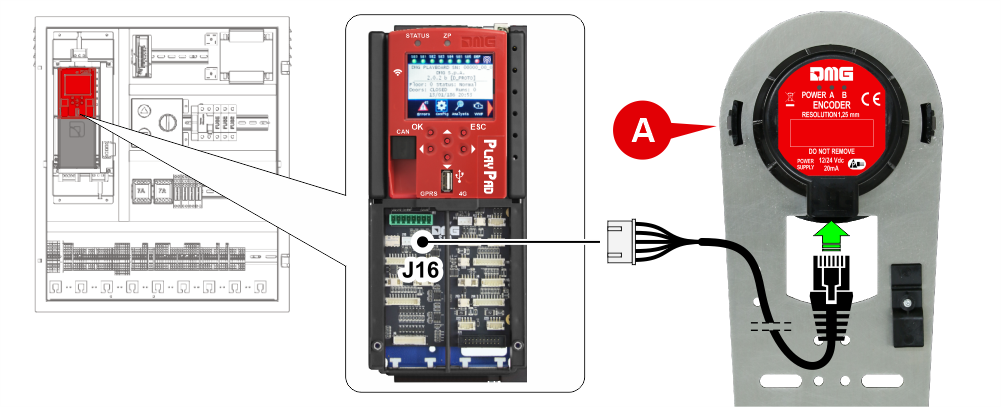 A) – Encoder met een resolutie van 1,25 mm
A) – Encoder met een resolutie van 1,25 mm
– Tot firmwareversie 3.0.1 –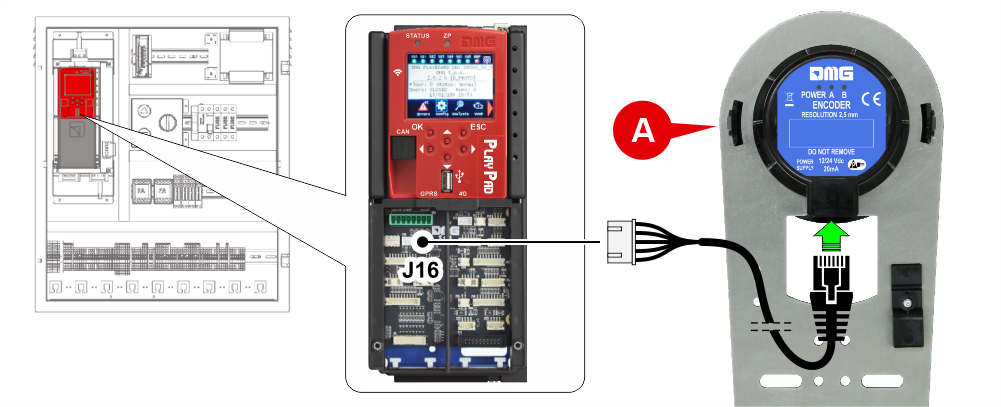 A) – Encoder met een resolutie van 2,50 mm
A) – Encoder met een resolutie van 2,50 mm
Aansluiting op bestaande MUSA / PLAYBOARD V3-controllers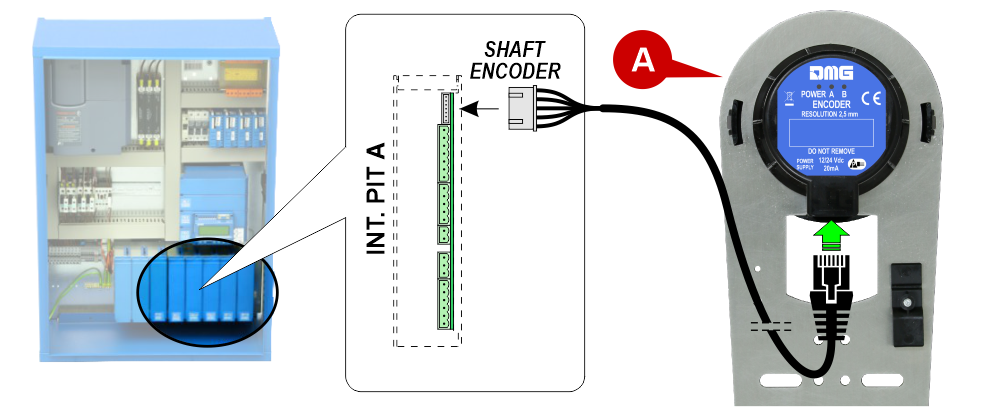
A) – Encoder met een resolutie van 2,50 mm
U kunt de bestaande touwencoder vervangen door de nieuwe magnetische encoder (resolutie 2,50 mm).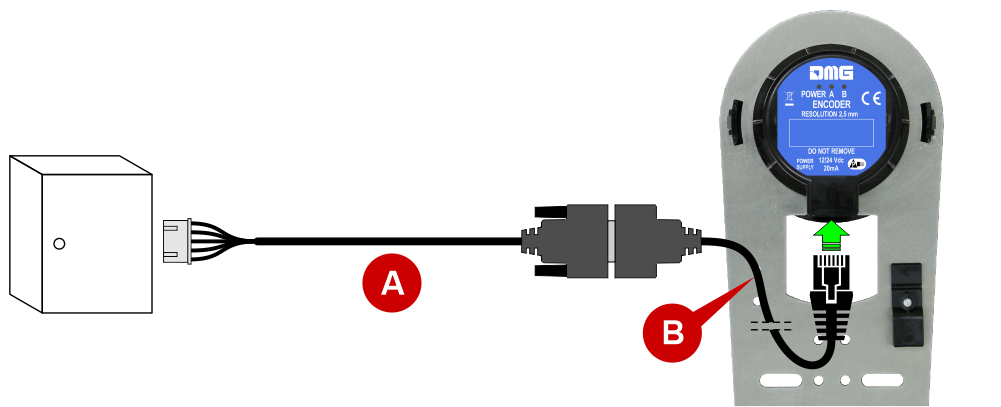
Laat de bestaande kabel (A) gewoon zitten en sluit deze aan op de nieuwe encoder met behulp van een adapterkabel (B).
Controleer na het vervangen van de encoder:
- De juiste draairichting in de inspectiemodus (opwaartse beweging, toename in mm, neerwaartse beweging, afname in mm). Wijzig indien nodig de draairichting vanaf de controller door deze instructies te volgen:
- Stel het paneel in op Tijdelijke bewerkingen (Configuratiemenu -> Tijdelijke bewerkingen -> Ja);
- Wijzig de rotatie in het menu Systeempositionering -> Positioneringssysteem -> encoder met de klok mee/tegen de klok in;
- Verwijder de tijdelijke bewerkingen (Configuratiemenu -> Tijdelijke bewerkingen -> Nee).
- Controleer of de auto op alle verdiepingen correct is uitgelijnd. Pas indien nodig de stopnauwkeurigheid aan via de controller in het menu Systeempositionering -> Verdiepingspositie.
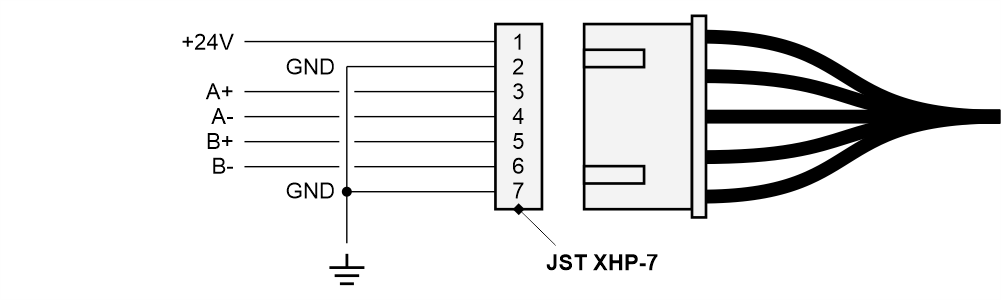
PIN-OUT JST 7-polige connector
Diagnostische LED

POWER: Als de LED brandt, wordt de encoder van stroom voorzien.
A/B: Status van encoderuitgangen. Als de liftcabine stilstaat, verandert de status van deze LED's niet (ze kunnen zowel AAN als UIT zijn); als de liftcabine in beweging is, branden beide LED's.
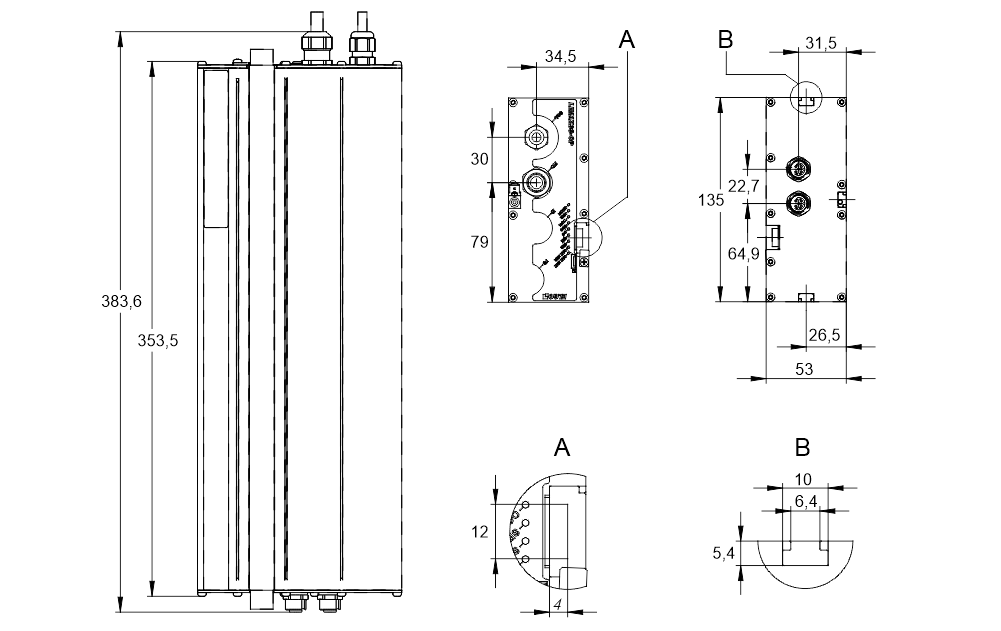
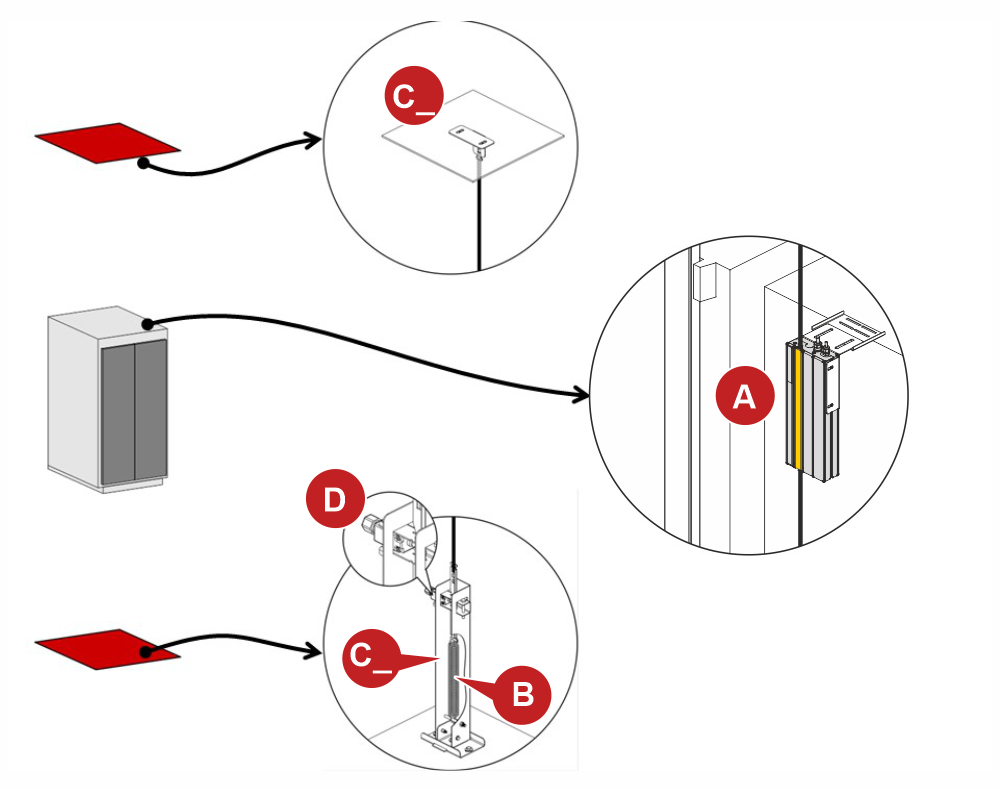
Absolute encoder (ELGO LIMAX 33 CP)
Met de absolute encoder kunt u alle veiligheidscontacten in de liftschacht vervangen. De positie van de cabine wordt gedetecteerd dankzij een magnetische strip.
Installatie
Afmetingen:
Systeemcomponenten
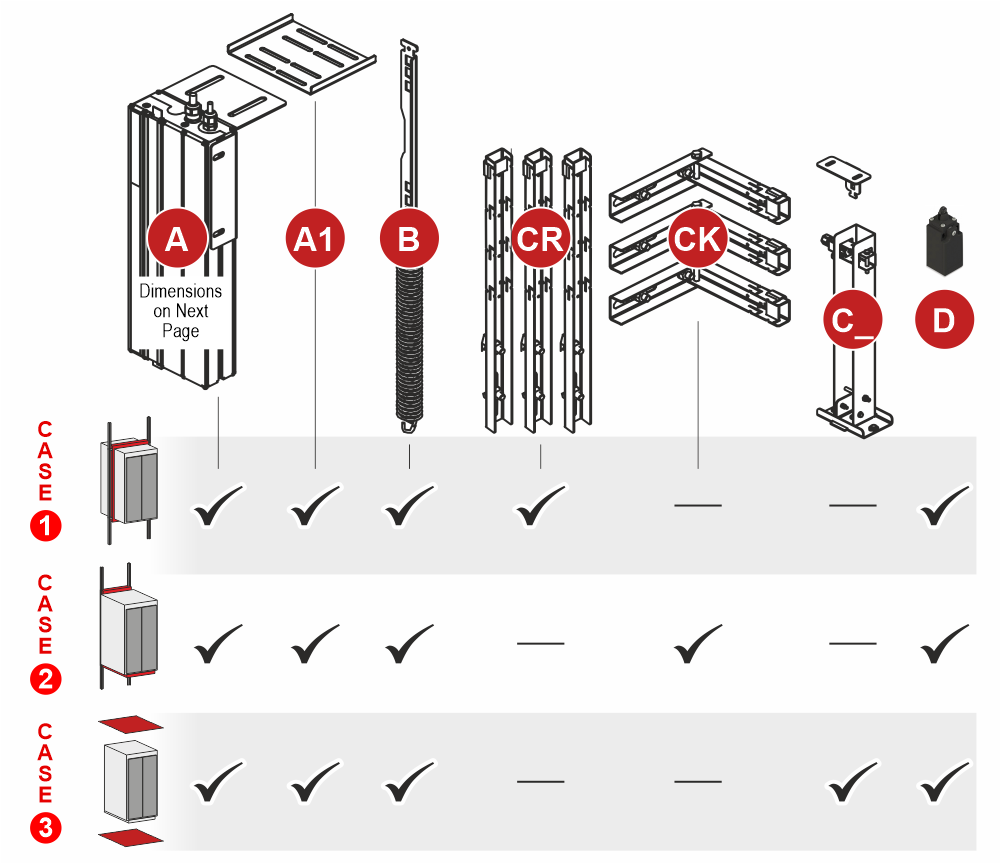
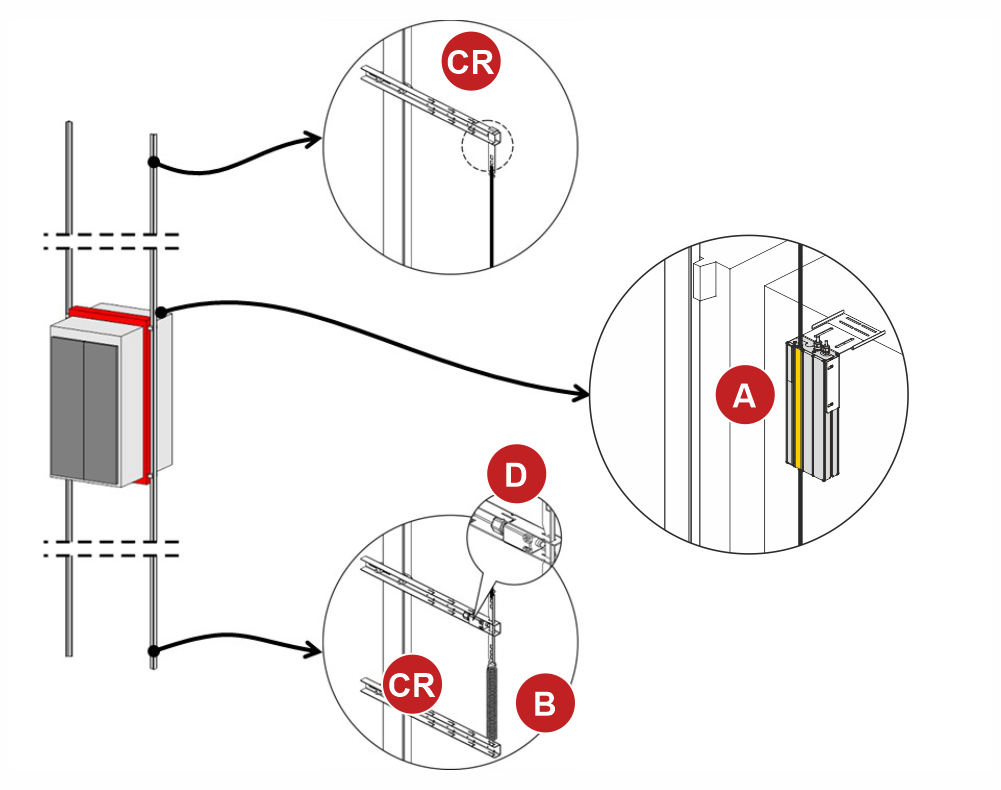
Geval 1: Liften met framemechanisme
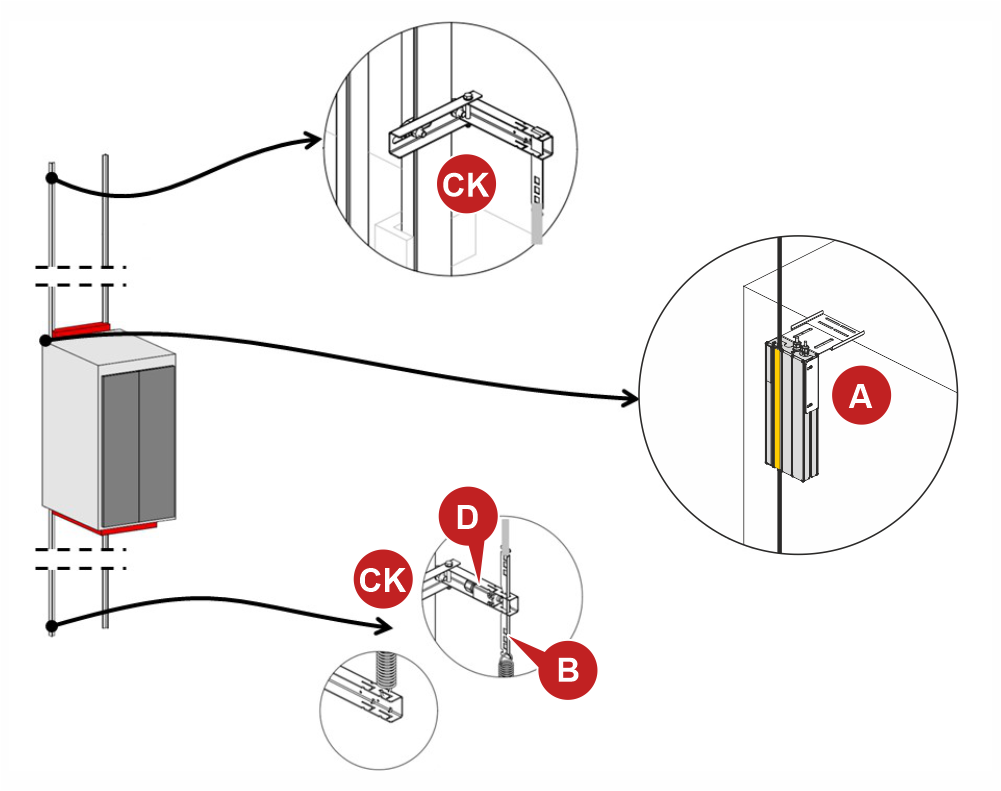
Geval 2: Liften met rugzakmechanisme
Geval 3: Bevestiging aan vloer en plafond
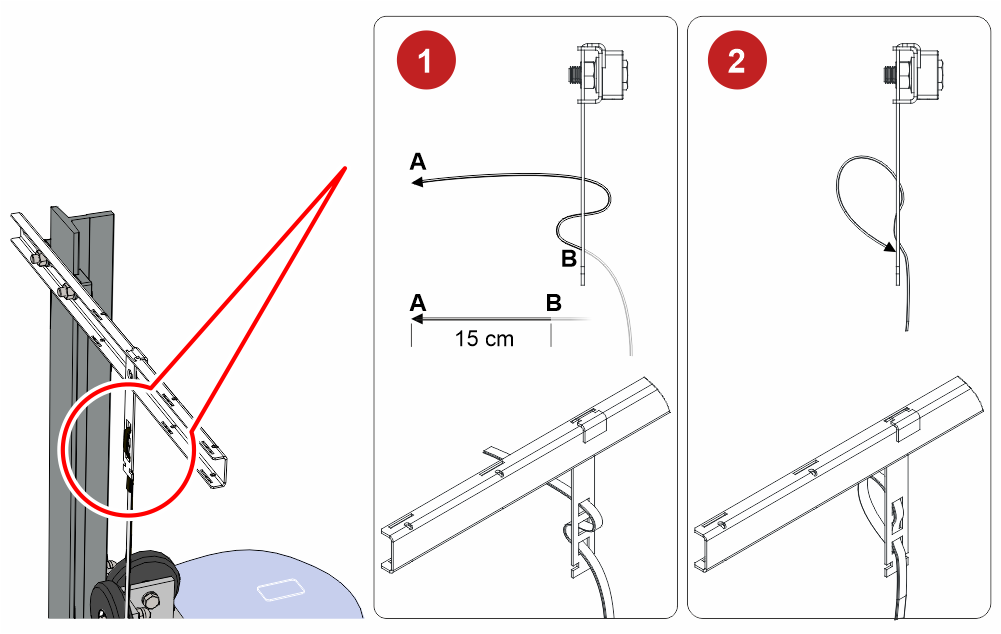
Montage
Geval 1 – Liften met framemechanica
Geval 2 – Liften met rugzakmechanisme
Geval 3 – Bevestiging aan vloer en plafond

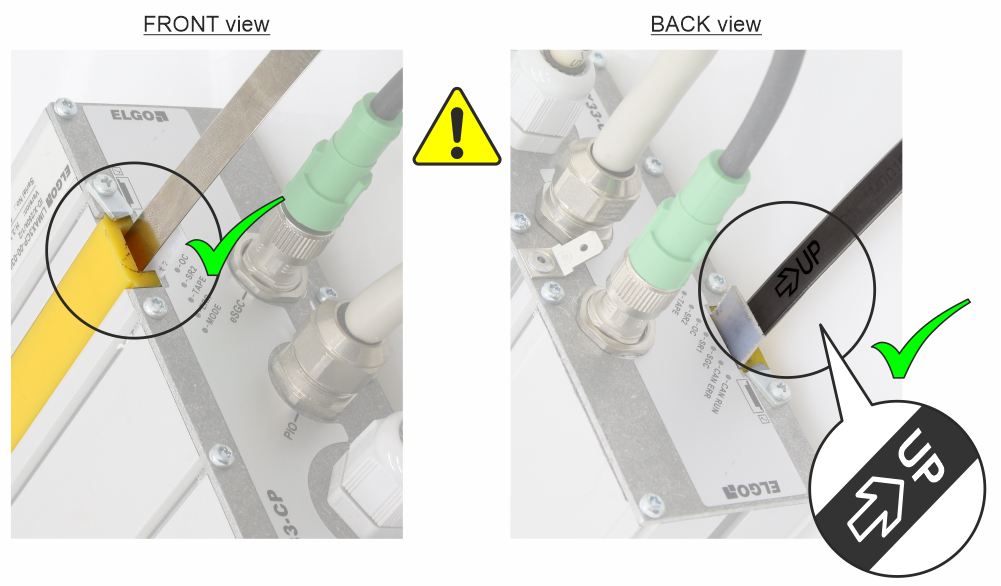
Zorg ervoor dat u de magneetstrip plaatst zoals weergegeven in de onderstaande afbeeldingen.
Juiste positionering van de magneetband![]() Verwijder alle magneten uit het compartiment voordat u de magneetband installeert.
Verwijder alle magneten uit het compartiment voordat u de magneetband installeert.
Installeer de magneetband niet in de buurt van permanente magneetmotoren.
Gebruik geen gemagnetiseerd gereedschap in de buurt van de magneetband.
Gebruik geen lasapparatuur in de buurt van de magneetband.
Respecteer de montage-instructies op de band en zorg ervoor dat deze in de juiste positie staat, zoals weergegeven in de volgende afbeelding:
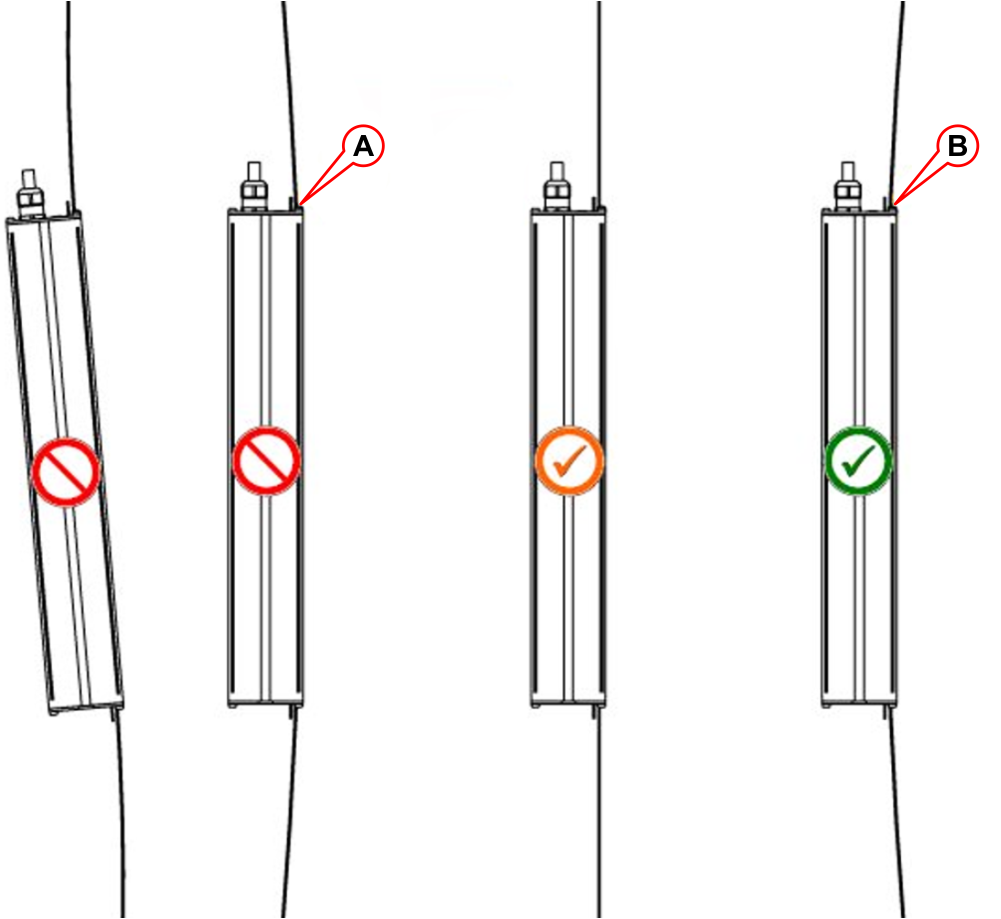
A) – De tape raakt de geleider met de gemagnetiseerde kant.
B) – De tape raakt de geleider met de stalen kant.
LED-signaal op het apparaat

| LED | BESCHRIJVING | |
|---|---|---|
| MODE | Normale modus | Langzaam knipperen (1 s) |
| Pre-commissioningmodus | Snel knipperen (0,1 s) | |
| Lesmodus | Lichten permanent | |
| FOUT | Geen fout | Led UIT |
| Algemene fout | Led AAN | |
| Noodfout | Knipperen | |
| TAPE | Magnetische band niet gedetecteerd | Led AAN |
| eSGC | eSGC Contact sluiten | Led AAN |
| eSGC Contact Open | Led UIT | |
| OC | OC Contact sluiten | Led AAN |
| OC Contact Open | Led UIT | |
| SR1 | SR1 Contact sluiten | Led AAN |
| SR1 Contact open | Led UIT | |
| SR2 | SR2 Contact sluiten | Led AAN |
| SR2 Contact open | Led UIT | |
| CAN-ERR | Status CAN Open | Led AAN |
| CAN-RUN | Status Kan openen | Led UIT |
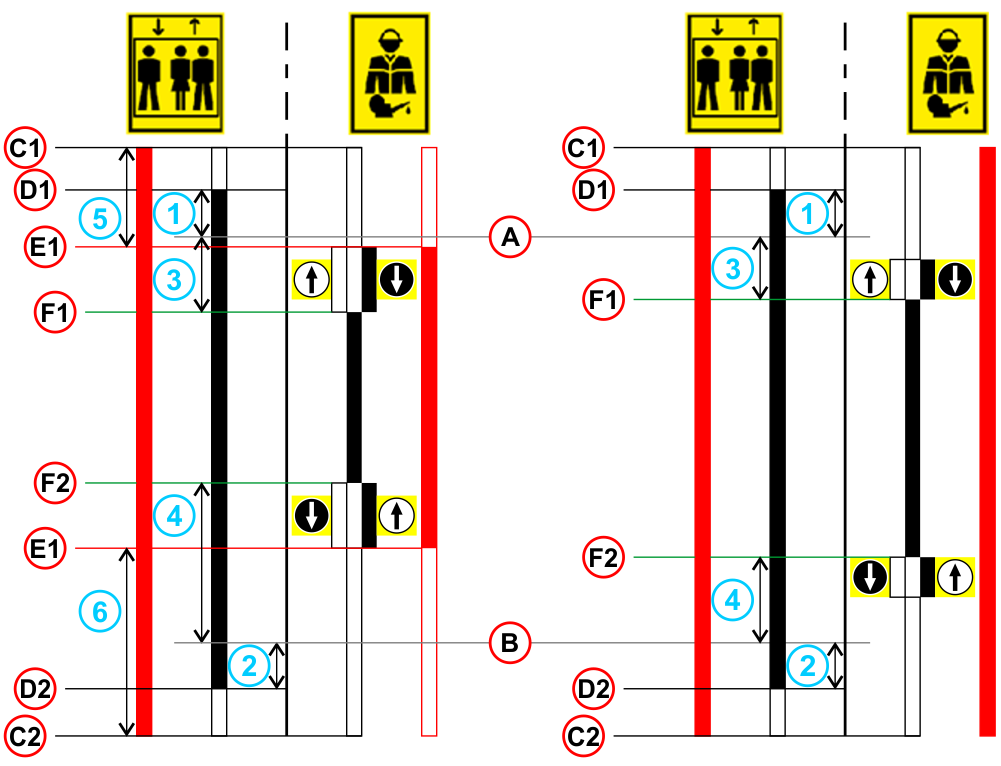
Uitleg over veiligheidscontacten
| Verminderde kop en/of verminderde PIT-installatie | Voldoende vrije ruimte boven en onder de schacht volgens EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
 |
|||
 | Normale modus | A) - | Bovenste verdieping |
 | Inspectiemodus | B) - | BOTTOM verdieping |
 | Status veiligheidscontacten | C1) - | Bovenste referentiepositie |
| Inspectie UP-knop | C2) - | Lagere referentiepositie | |
| Inspectie DOWN-knop | D1) - | Bovenste eindschakelaar | |
| Eindschakelaars Offset Omhoog | D2) - | Onderste eindschakelaar | |
| Eindschakelaars Offset Omlaag | E1) - | Bovenste vooraf ingeschakelde stoplimiet van het remsysteem | |
| Inspectie-eindschakelaars Offset Omhoog | E2) - | Lagere vooraf ingestelde limiet van het remsysteem | |
| Inspectie-eindschakelaars Offset Omlaag | F1) - | Bovenste inspectiegrensschakelaar | |
| Vooraf geactiveerd remsysteem Offset Up | F2) - | Onderste inspectiegrensschakelaar | |
| Vooraf geactiveerd remsysteem Offset omlaag | |||
Handmatige aanpassing van de posities van de aangegeven is mogelijk vanuit het menu. <Positioning> Monitor Encoder (zie onderstaande tabel).
| Label | Pagina | Beschrijving | |
|---|---|---|---|
| N_LIM_S | 7 | Bovenste eindschakelaarverschuiving (verschuiving boven bovenste verdieping) | |
| N_LIM_D | 7 | Onderste eindschakelaar offset (offset onder ondervloer) | |
| I_LIM_S | 6 | Bovenste inspectiegrensschakelaar (verschuiving onder bovenste verdieping) | |
| I_LIM_D | 6 | Onderste inspectiegrensschakelaar (verschuiving ten opzichte van de ondervloer) | |
| REIZEN | 8 | Bovenste vooraf ingestelde stopgrens (vanaf bovenste referentiepositie) | |
| TRIPD | 8 | Onderste limiet van het vooraf geactiveerde stopsysteem (vanaf de onderste referentiepositie) |
TRIPS- en TRIPD-waarden worden alleen gebruikt als ELGO deel uitmaakt van het veiligheidssysteem voor beperkte kop- en/of puthoogte (ELGO + eSGC).
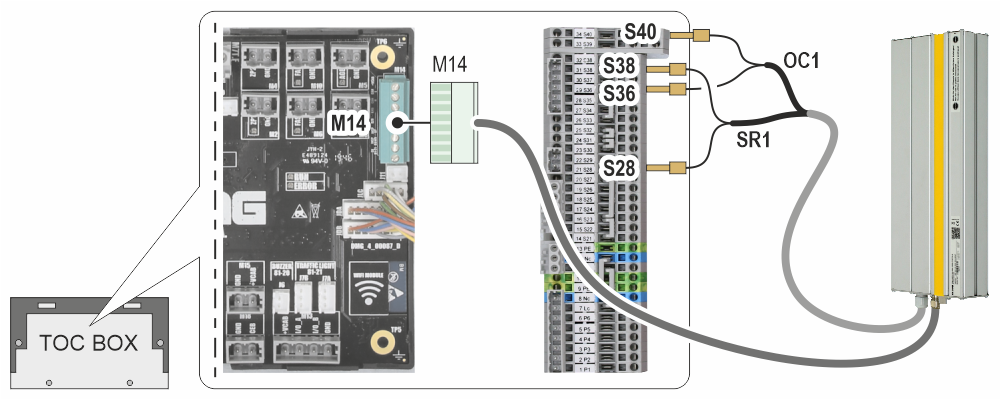
Bedradingen
Aansluiting op Pitagora 4.0-controller
De ELGO-encoder is rechtstreeks aangesloten op de TOC-box (bovenkant cabine).
Video-instructie
Engelse taal
Italiaanse taal