
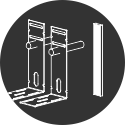
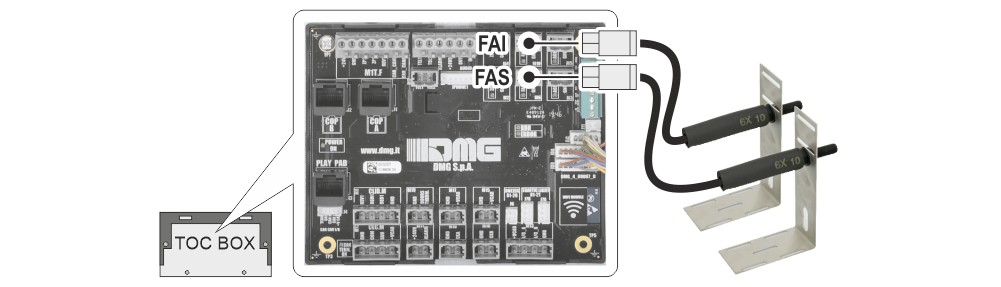
Leitores magnéticos (FAI / FAS)
Este sistema de contagem consiste em dois leitores magnéticos (FAI-FAS) com um contacto normalmente aberto montado em dois suportes posicionados na parte superior da cabina e um conjunto de ímanes posicionados nos trilhos do elevador.
Este sistema de contagem pode ser utilizado quando as características do sistema satisfazem as seguintes condições:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Instalação

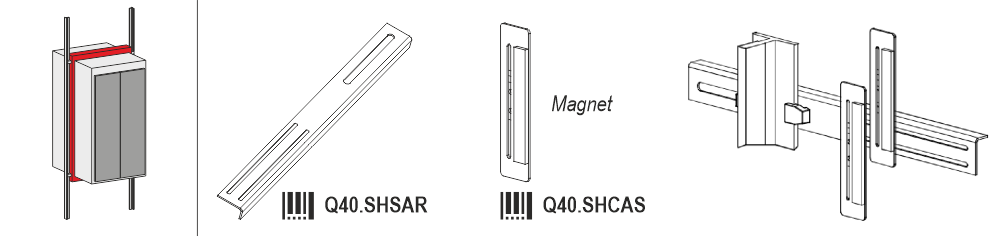
Caso A: Elevadores com mecanismo de estrutura
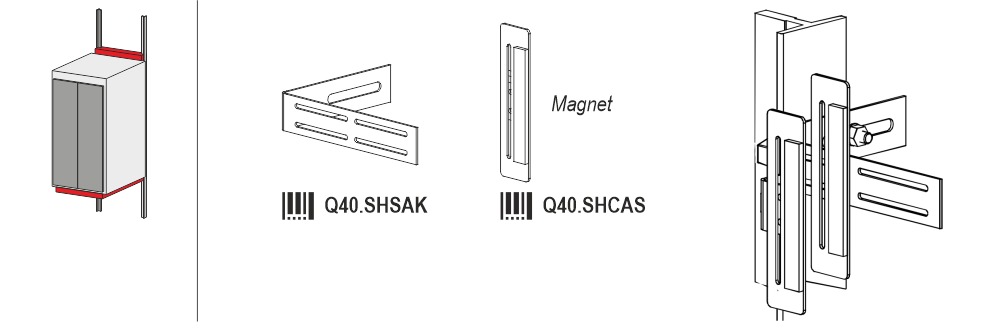
Caso B: Elevadores com mecanismo de mochila
Acessórios para casos especiais
Posicionamento de ímanes nas guias do elevador
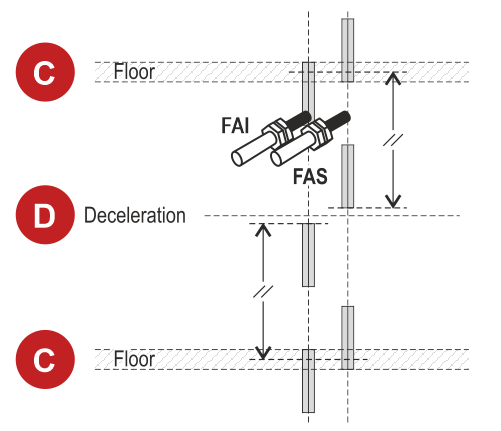
C) Pisos
D) Desaceleração
Fiação
Os leitores magnéticos estão ligados diretamente à caixa TOC (parte superior da cabine).
Codificador do motor
Este sistema de contagem só pode ser utilizado em sistemas com velocidades inferiores a 2 m/s e sem manobras de porta aberta; é adequado apenas para as seguintes placas opcionais para motores sem engrenagens com sistemas de circuito fechado:
OPC-PR Q40.SCLSC – Encoder Sin Cos
OPC-PS Q40.SCLFL – Encoder En Dat
OPC-PSH Q40.SCLSCH – Encoder Sin Cos+Hiperface
O controlador processa os sinais transmitidos pelas placas OPC, convertendo os impulsos numa contagem.
Este sistema de contagem tem uma precisão de aproximadamente 1 milímetro.

Codificador magnético de cabo DMG
O novo codificador magnético DMG utiliza um sensor para detetar a rotação e a posição de um íman colocado no eixo da polia do codificador. Os impulsos gerados são recebidos e processados pelo painel de controlo do elevador, que calcula a posição, a direção e a velocidade da cabina.
Instalação
Conselhos e avisos
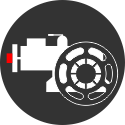
A polia que incorpora o codificador deve ser instalada na parte superior do eixo ou no poço, perto da sala das máquinas.
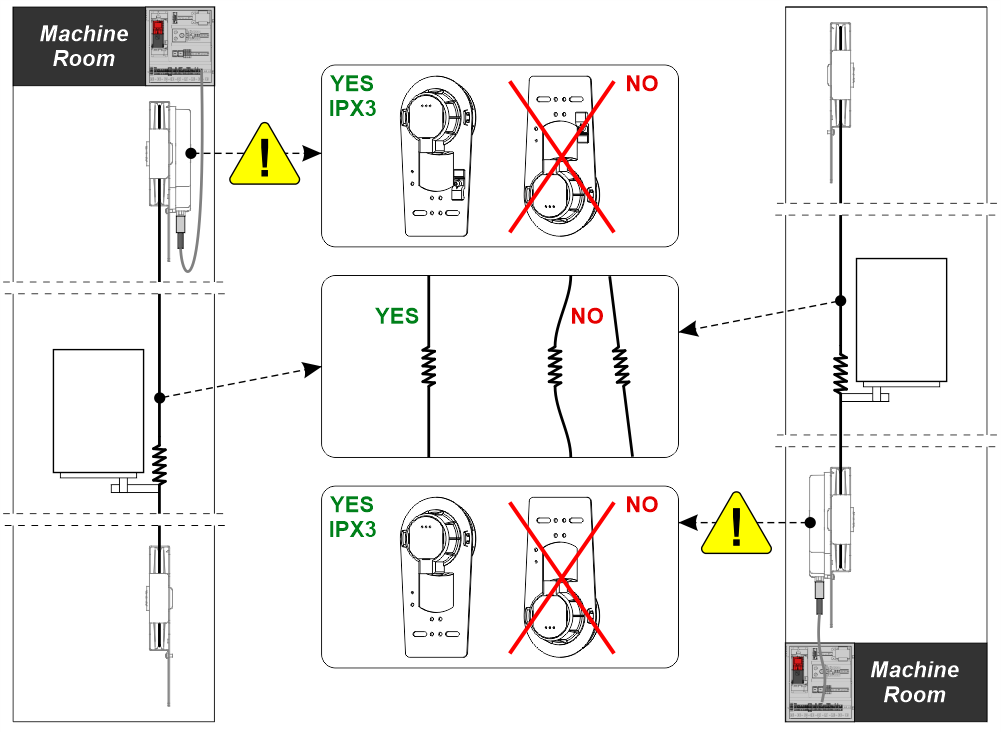
Componentes do sistema
Caso 1: Elevadores com mecanismo de estrutura
Caso 2: Elevadores com mecanismo de mochila
A) – É a polia do codificador que contém a placa eletrónica. Pode ter 2 resoluções:
– 1,25 mm (100 PPR) para o encoder com etiqueta vermelha: Para ser usado com o controlador Pitagora 4.0 a partir da versão de firmware 3.0.2
– 2,5 mm (50 PPR) para o codificador com etiqueta azul: Para ser utilizado com os controladores V3 / Musa / Pitagora 4.0 até à versão de firmware Y
C) – O tensionador de mola também pode ser montado na parte superior da cabine, conforme necessário.
Montagem
A montagem depende da mecânica da instalação.
Caso 1 – Elevadores com mecânica de estrutura
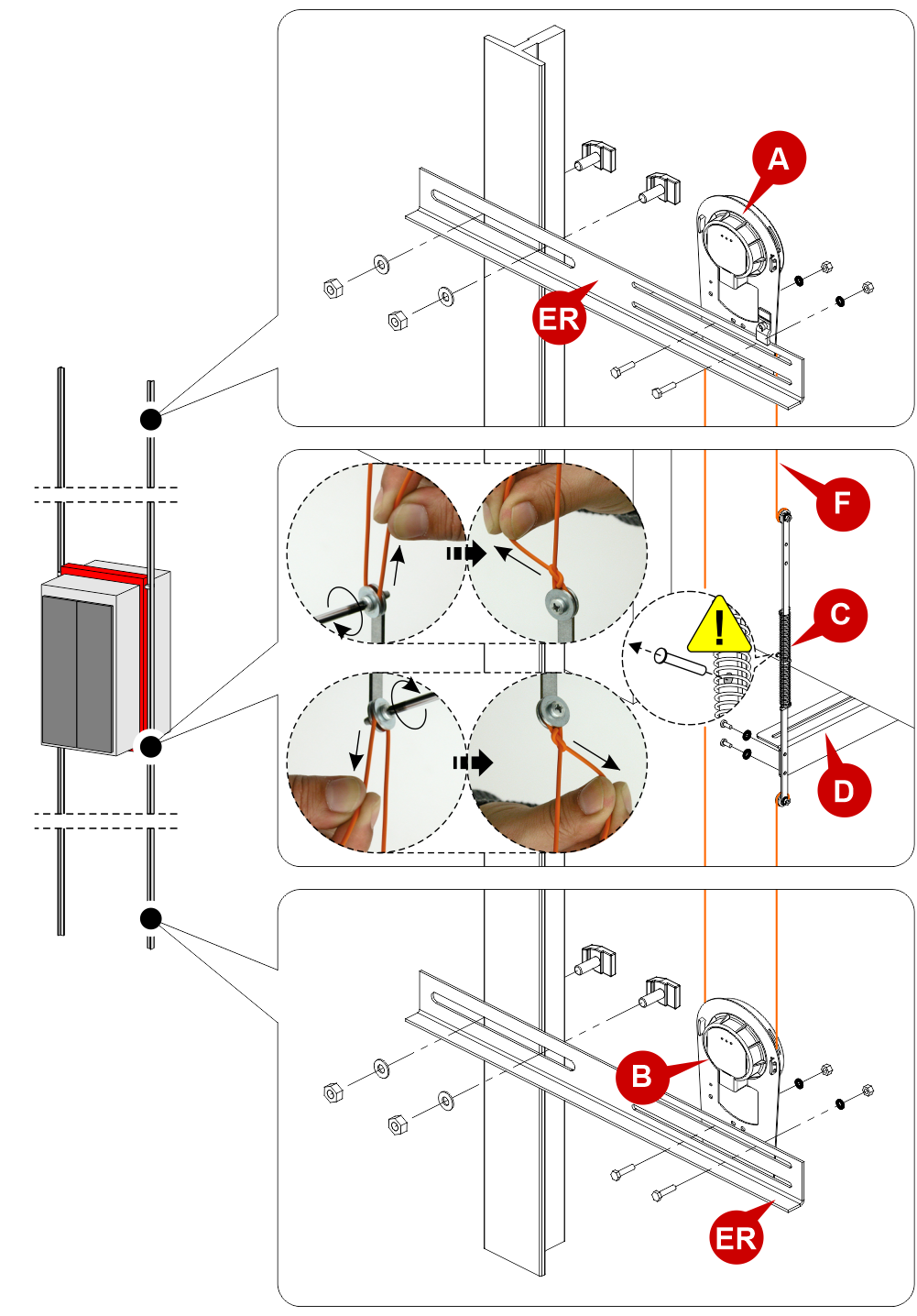
C) – O tensionador de mola também pode ser montado na parte superior da cabine, conforme necessário.
![]() Remova o retentor somente após a conclusão da instalação.
Remova o retentor somente após a conclusão da instalação.
No caso de substituição em sistemas antigos, será necessário desamarrar o cabo antigo e voltar a tensioná-lo após a montagem do novo codificador.
Caso 2 – Elevadores com mecanismo de mochila
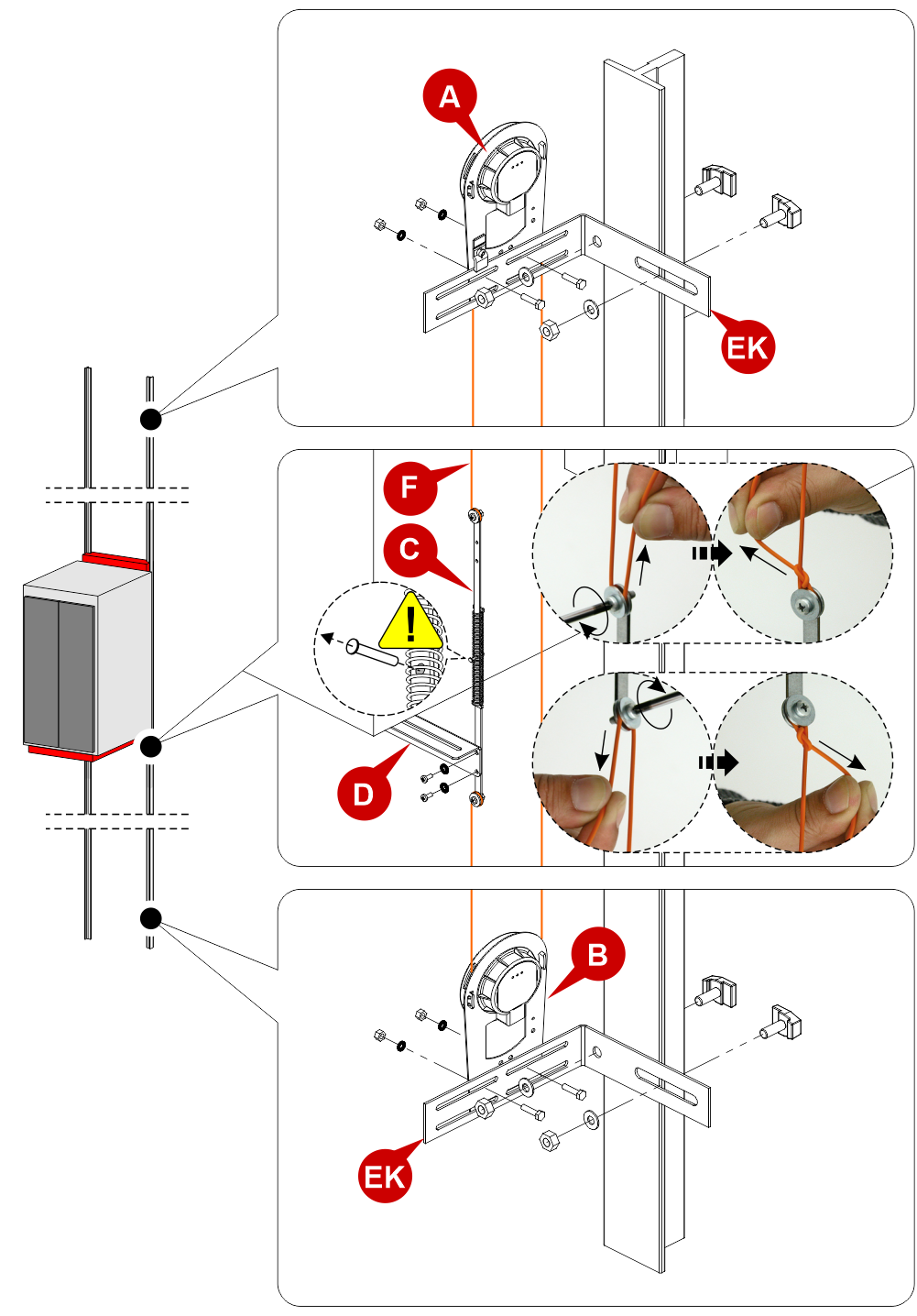
C) – O tensionador de mola também pode ser montado na parte superior da cabine, conforme necessário.
![]() Remova o retentor somente após a conclusão da instalação.
Remova o retentor somente após a conclusão da instalação.
No caso de substituição em sistemas antigos, será necessário desamarrar o cabo antigo e voltar a tensioná-lo após a montagem do novo codificador.
Fiação
Ligação ao controlador Pitagora 4.0
– A partir da versão 3.0.2 do firmware –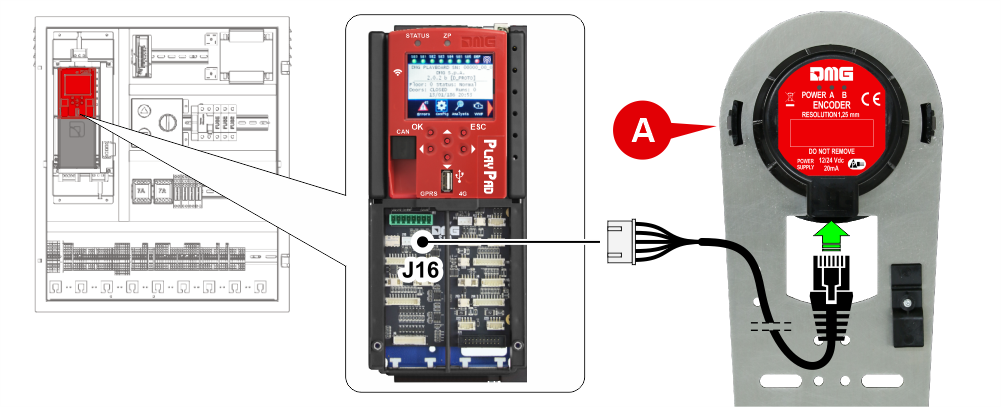 A) – Codificador com resolução de 1,25 mm
A) – Codificador com resolução de 1,25 mm
– Até a versão 3.0.1 do firmware –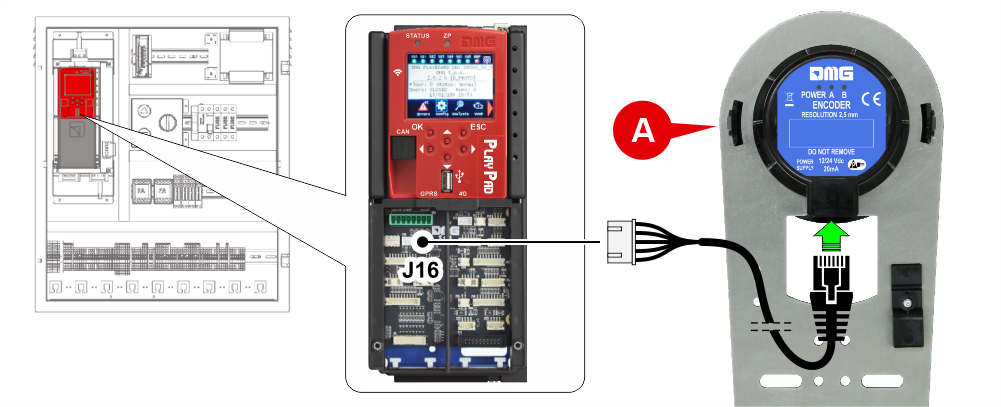 A) – Encoder com resolução de 2,50 mm
A) – Encoder com resolução de 2,50 mm
Ligação aos controladores MUSA / PLAYBOARD V3 existentes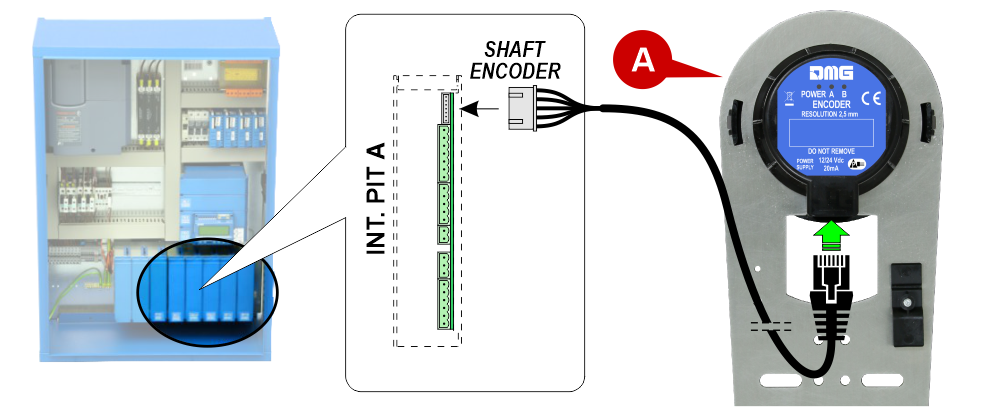
A) – Encoder com resolução de 2,50 mm
Pode substituir o codificador de corda existente pelo novo codificador magnético (resolução de 2,50 mm).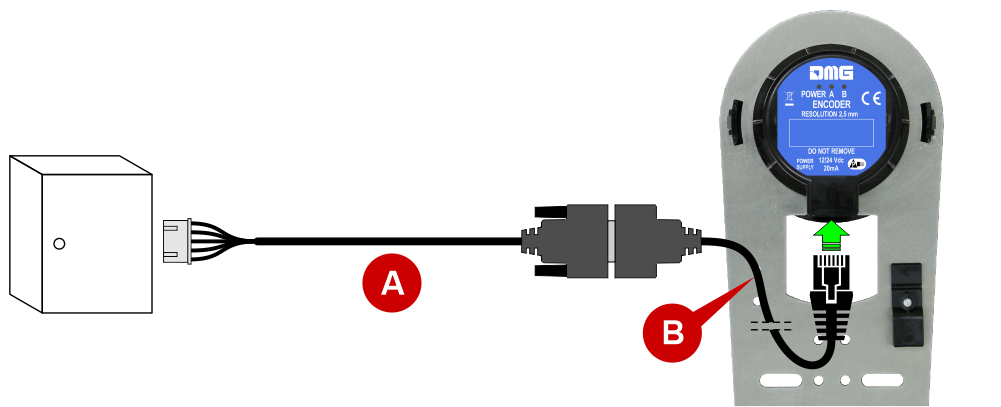
Basta deixar o cabo existente (A) e ligá-lo ao novo codificador por meio de um cabo adaptador (B).
Após substituir o codificador, verifique:
- A direção correta de rotação no modo de inspeção (movimento para cima, aumento em mm, movimento para baixo, diminuição em mm). Se necessário, altere a direção de rotação a partir do controlador, seguindo estas instruções:
- Defina o painel em Operações temporárias (menu Configuração -> Operações temporárias -> Sim);
- Altere a rotação no menu Posicionamento do sistema -> Sistema de posicionamento -> encoder no sentido horário/anti-horário;
- Remova as operações temporárias (menu Configuração -> Operações temporárias -> Não).
- Verifique o alinhamento correto do carro em todos os andares. Se necessário, ajuste a precisão de paragem a partir do controlador no menu Posicionamento do sistema -> Posição do piso.
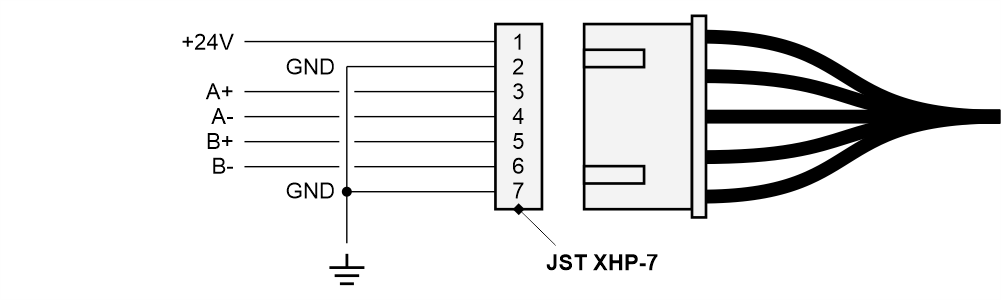
Conector PIN OUT JST de 7 pólos
LED de diagnóstico

POWER: Se o LED estiver aceso, o codificador está ligado.
A/B: Estado das saídas do codificador. Com a cabina do elevador parada, não há alteração no estado destes LEDs (eles podem estar acesos ou apagados); com a cabina do elevador em movimento, os LEDs ficarão acesos.
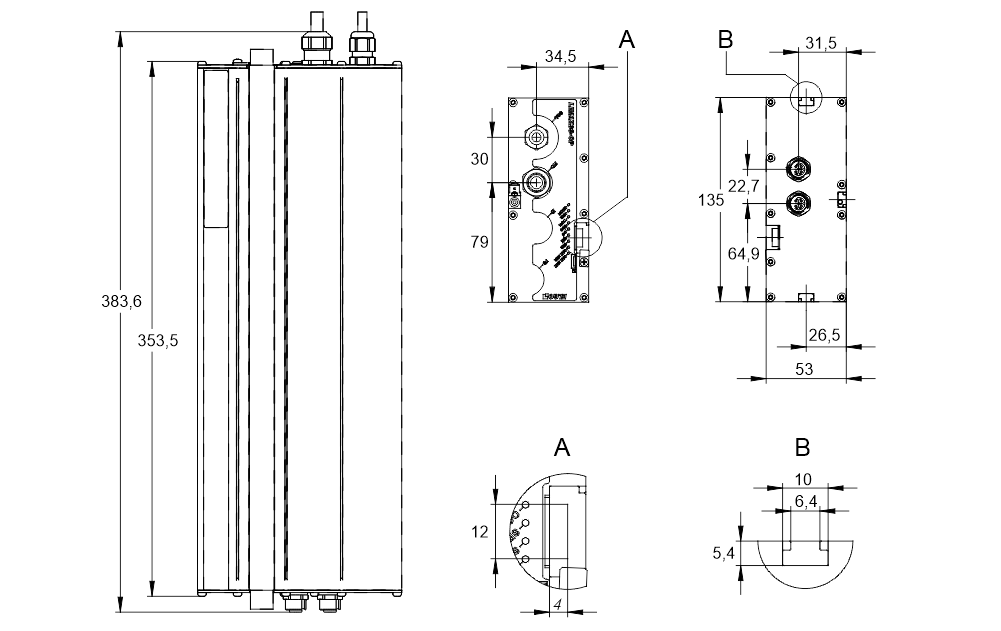
Encoder absoluto (ELGO LIMAX 33 CP)
O encoder absoluto permite substituir todos os contactos de segurança dentro do poço do elevador. A posição da cabina é detetada graças a uma fita magnética.
Instalação
Dimensões:
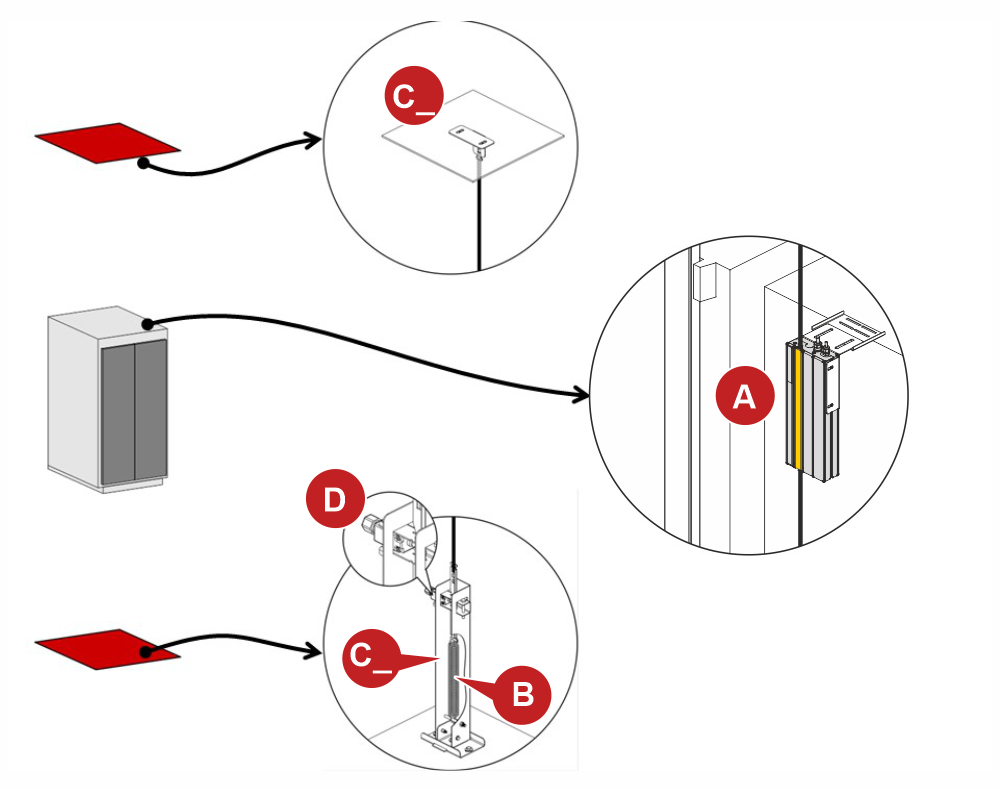
Componentes do sistema
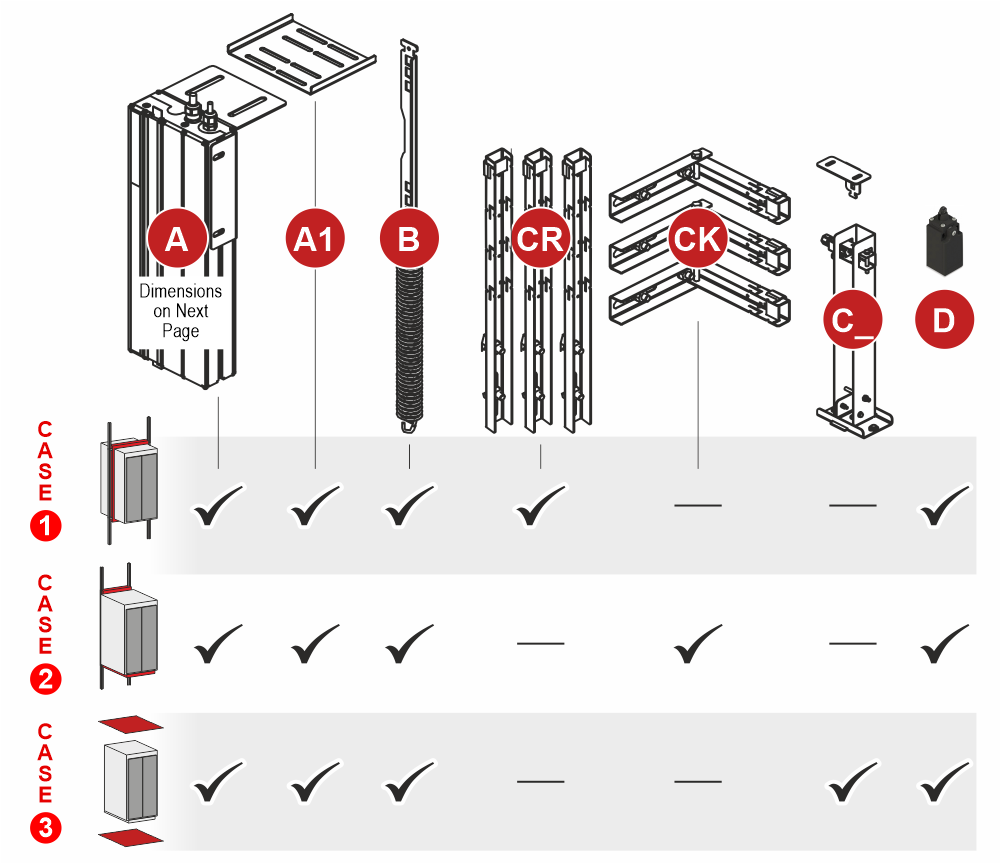
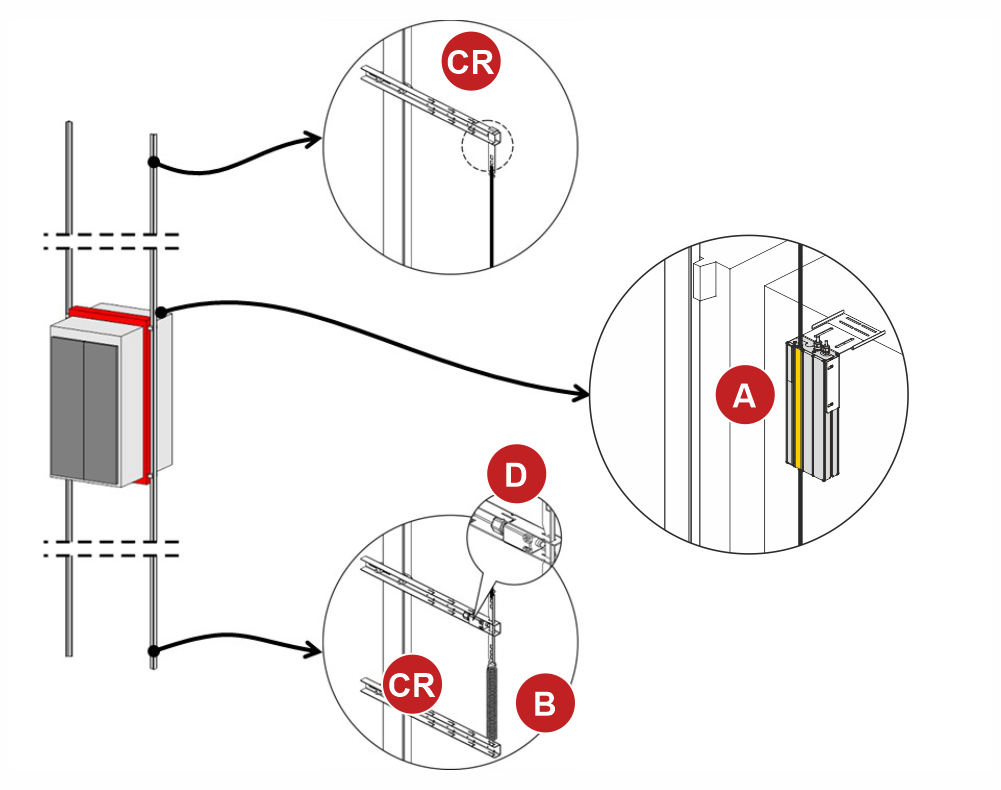
Caso 1: Elevadores com mecanismo de estrutura
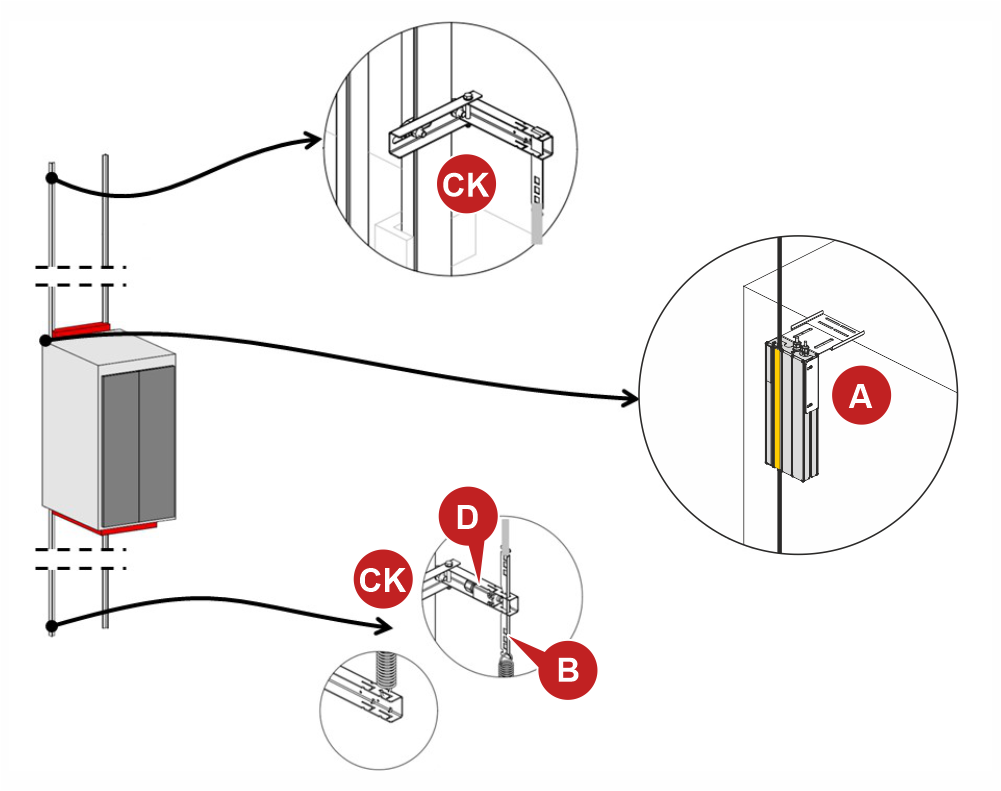
Caso 2: Elevadores com mecanismo de mochila
Caso 3: Fixação no chão e no teto
Montagem
Caso 1 – Elevadores com mecânica de estrutura
Caso 2 – Elevadores com mecanismo de mochila
Caso 3 – Fixação no chão e no teto

Tenha o cuidado de posicionar a banda magnética conforme mostrado nas figuras abaixo.
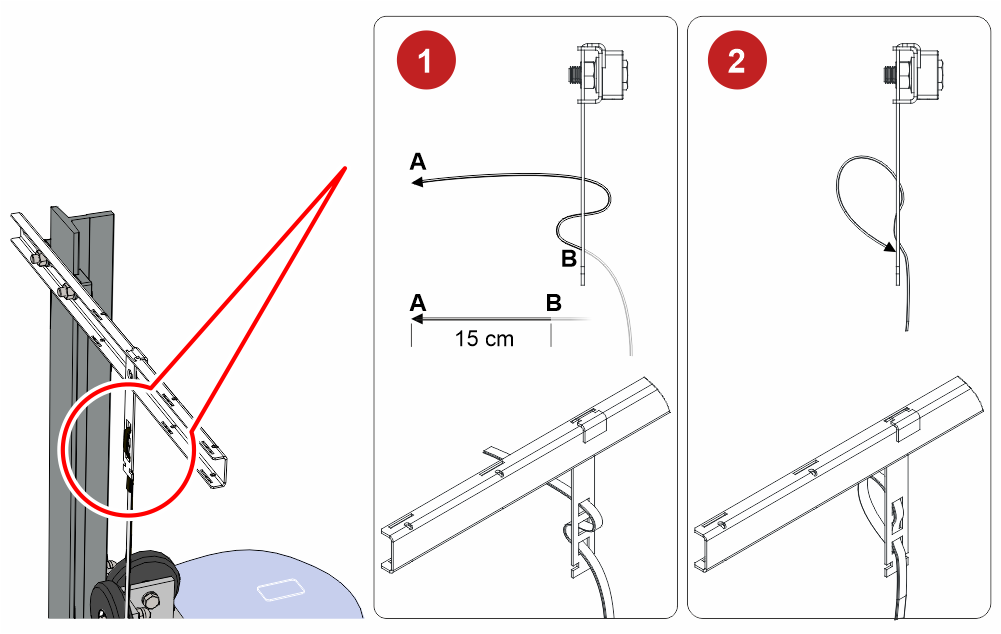
Posicionamento correto da fita magnética![]() Remova todos os ímanes do compartimento antes de instalar a fita magnética.
Remova todos os ímanes do compartimento antes de instalar a fita magnética.
Não instale a fita magnética perto de motores de íman permanente.
Não utilize ferramentas magnetizadas perto da fita magnética.
Não utilize equipamento de soldadura perto da fita magnética.
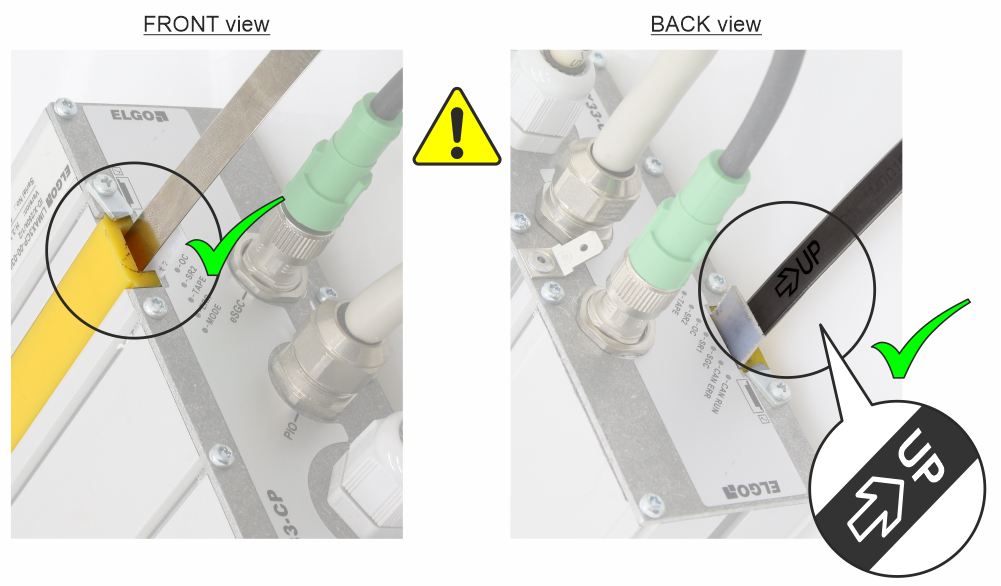
Respeite o encaixe indicado na fita e certifique-se de que está na posição correta, conforme mostrado na figura seguinte:
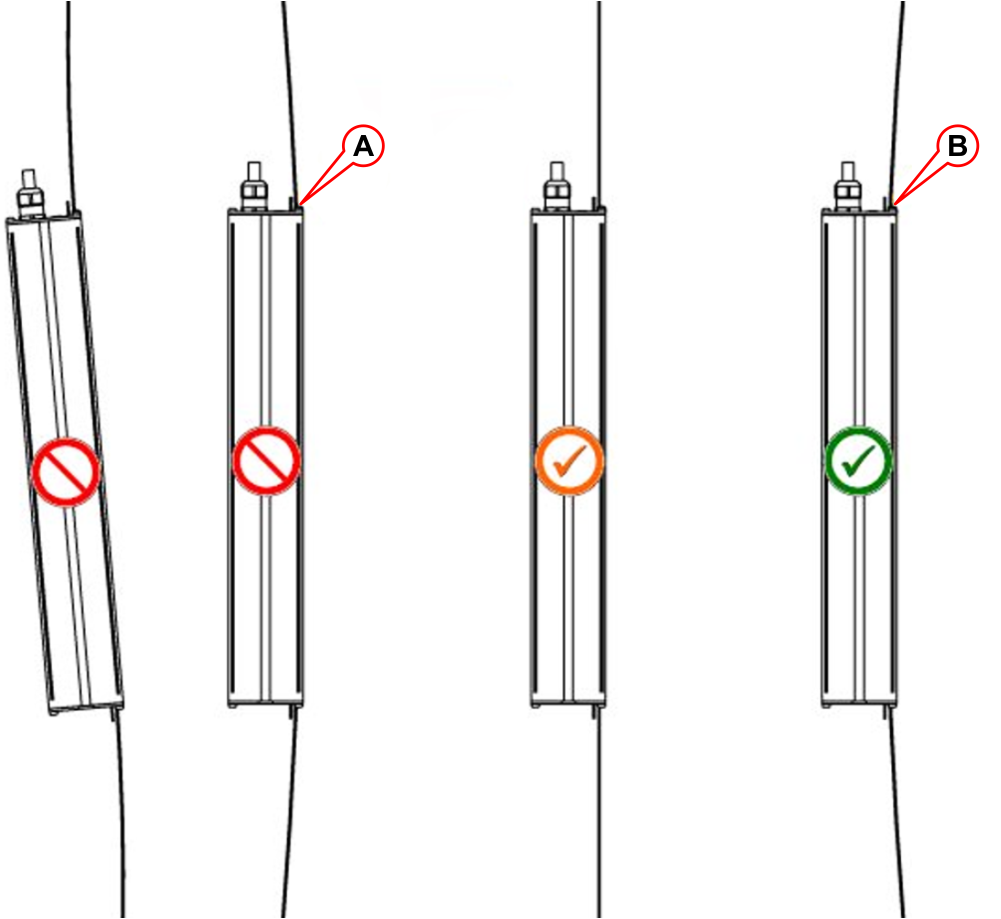
A) – A fita toca a guia com o lado magnetizado.
B) – A fita toca a guia com o lado de aço.
Sinal LED no dispositivo

| LED | DESCRIÇÃO | |
|---|---|---|
| MODO | Modo normal | Piscando lentamente (1 s) |
| Modo de pré-comissionamento | Piscada rápida (0,1 s) | |
| Modo de ensino | Luzes permanentemente | |
| ERRO | Sem erros | LED desligado |
| Erro genérico | LED aceso | |
| Erro de emergência | Piscando | |
| FITA | Fita magnética não detetada | LED aceso |
| eSGC | eSGC Contacto fechar | LED aceso |
| eSGC Contacto Aberto | LED desligado | |
| OC | OC Contato fechar | LED aceso |
| OC Contacto Aberto | LED desligado | |
| SR1 | SR1 Fechar contacto | LED aceso |
| SR1 Contacto aberto | LED desligado | |
| SR2 | SR2 Contacto fechar | LED aceso |
| SR2 Contacto Aberto | LED desligado | |
| CAN-ERR | Status CAN aberto | LED aceso |
| CAN-RUN | Status Pode abrir | LED desligado |
Explicação sobre os contactos de segurança
| Instalação de cabeça reduzida e/ou PIT reduzido | Espaço livre suficiente na parte superior e inferior de acordo com a norma EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
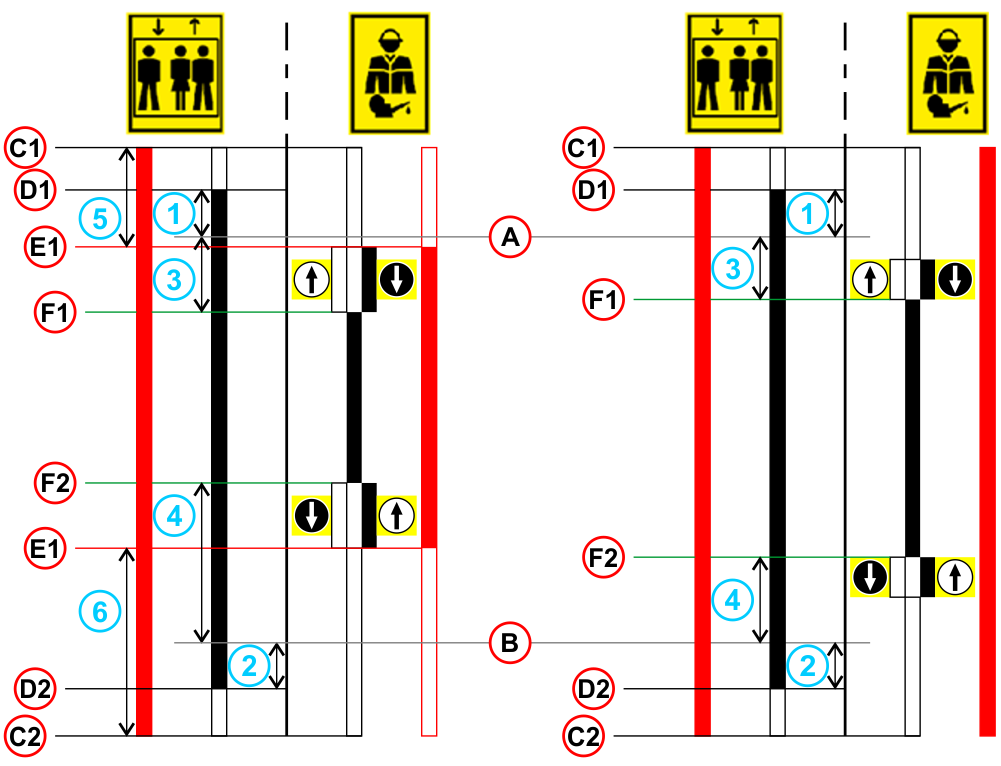 |
|||
 | Modo Normal | A) - | Último andar |
 | Modo de inspeção | B) - | PISO INFERIOR |
 | Estado dos contactos de segurança | C1) - | Posição de referência superior |
| Botão Inspecionar UP | C2) - | Posição de referência inferior | |
| Botão DOWN de inspeção | D1) - | Interruptor de limite final superior | |
| Interruptores de limite final Desvio para cima | D2) - | Interruptor de limite final inferior | |
| Interruptores de limite final Desvio para baixo | E1) - | Limite superior do sistema de paragem pré-acionado | |
| Interruptores de limite de inspeção Desvio para cima | E2) - | Limite inferior do sistema de travagem pré-acionado | |
| Interruptores de limite de inspeção Desvio para baixo | F1) - | Interruptor de limite superior de inspeção | |
| Sistema de travagem pré-acionado Desvio para cima | F2) - | Interruptor de limite inferior de inspeção | |
| Sistema de travagem pré-acionado com desvio para baixo | |||
O ajuste manual das posições indicadas é possível a partir do menu. <Positioning> Monitor Encoder (ver tabela abaixo).
| Etiqueta | Página | Descrição | |
|---|---|---|---|
| N_LIM_S | 7 | Desvio do interruptor de limite final superior (desvio acima do piso superior) | |
| N_LIM_D | 7 | Desvio do interruptor de limite final inferior (desvio abaixo do piso inferior) | |
| I_LIM_S | 6 | Interruptor de limite de inspeção superior (desvio sob o piso superior) | |
| I_LIM_D | 6 | Interruptor de limite inferior de inspeção (desvio sobre o piso inferior) | |
| VIAGENS | 8 | Limite superior do sistema de paragem pré-acionado (a partir da posição de referência superior) | |
| TRIPD | 8 | Limite inferior do sistema de paragem pré-acionado (a partir da posição de referência inferior) |
Os valores TRIPS e TRIPD são utilizados apenas se o ELGO fizer parte do Sistema de Segurança para Redução da Cabeça e/ou Fossa (ELGO + eSGC).
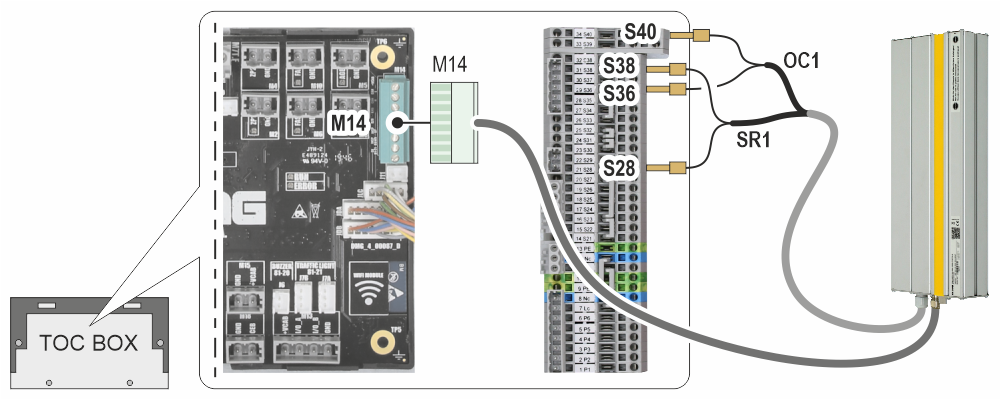
Fiação
Ligação ao controlador Pitagora 4.0
O codificador ELGO está ligado diretamente à caixa TOC (parte superior da cabine).
Tutorial em vídeo
língua inglesa
língua italiana