
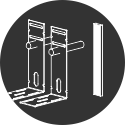
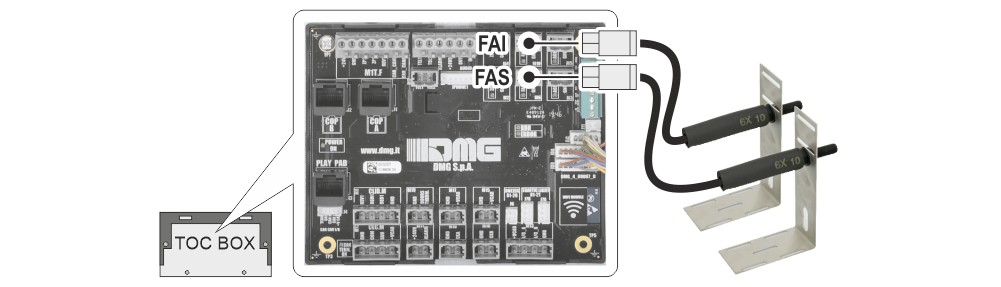
Lecteurs magnétiques (FAI / FAS)
Ce système de comptage se compose de deux lecteurs magnétiques (FAI-FAS) avec un contact normalement ouvert, montés sur deux supports placés sur le dessus de la cabine, et d'un ensemble d'aimants placés sur les rails de l'ascenseur.
Ce système de comptage peut être utilisé lorsque les caractéristiques du système répondent aux conditions suivantes :
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Installation

Cas A : Ascenseurs avec mécanique de châssis
Cas B : Ascenseurs avec mécanique de sac à dos
Accessoires pour cas particuliers
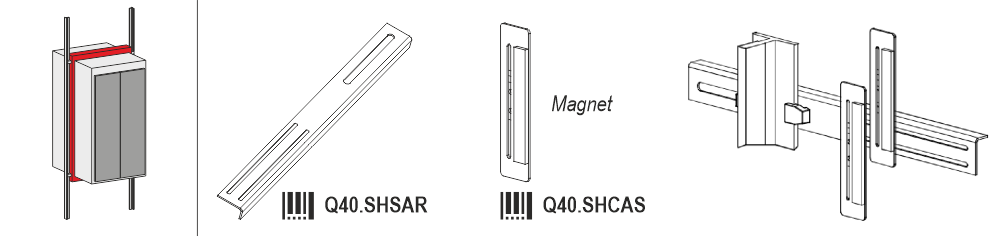
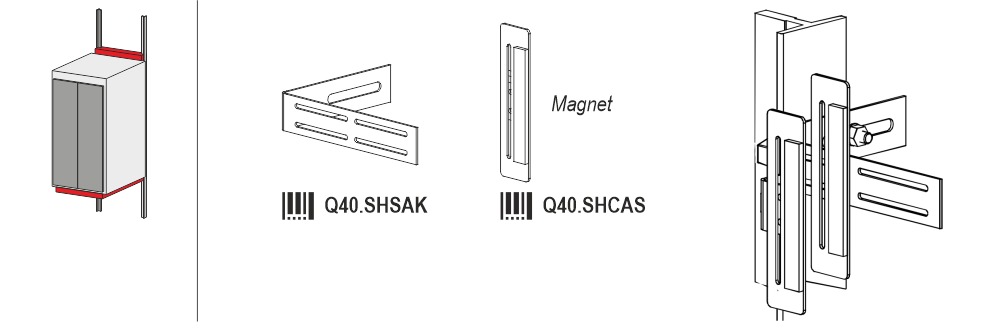
Positionnement des aimants sur les guides d'ascenseur
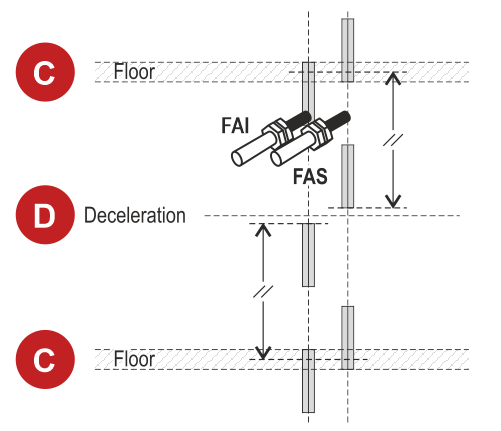
C) Niveaux
D) Décélération
Câblages
Les lecteurs magnétiques sont connectés directement à la boîte TOC (haut de la cabine).
Encodeur du moteur
Ce système de comptage ne peut être utilisé que sur des systèmes dont la vitesse est inférieure à 2 m/s et sans manœuvres de portes ouvertes ; il ne convient qu'aux cartes optionnelles suivantes pour les moteurs Gearless avec systèmes en boucle fermée :
OPC-PR Q40.SCLSC - Encodeur Sin Cos
OPC-PS Q40.SCLFL - Encodeur En Dat
OPC-PSH Q40.SCLSCH - Encodeur Sin Cos+Hiperface
L'armoire de manœuvre traite les signalisations transmises par les cartes OPC, convertissant les impulsions en un comptage.
Ce système de comptage a une précision d'environ 1 millimètre.

Codeur magnétique à câble DMG
Le nouveau codeur magnétique DMG utilise un capteur pour détecter la rotation et la position d'un aimant placé sur l'axe de la poulie du codeur. Les impulsions générées sont reçues et traitées par le panneau de commande de l'ascenseur qui calcule la position, la direction et la vitesse de la cabine.
Installation
Conseils et avertissements
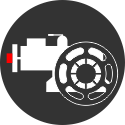
La poulie dans laquelle se trouve l'encodeur doit être installée en haut de la gaine ou dans la fosse, à proximité de la salle des machines.
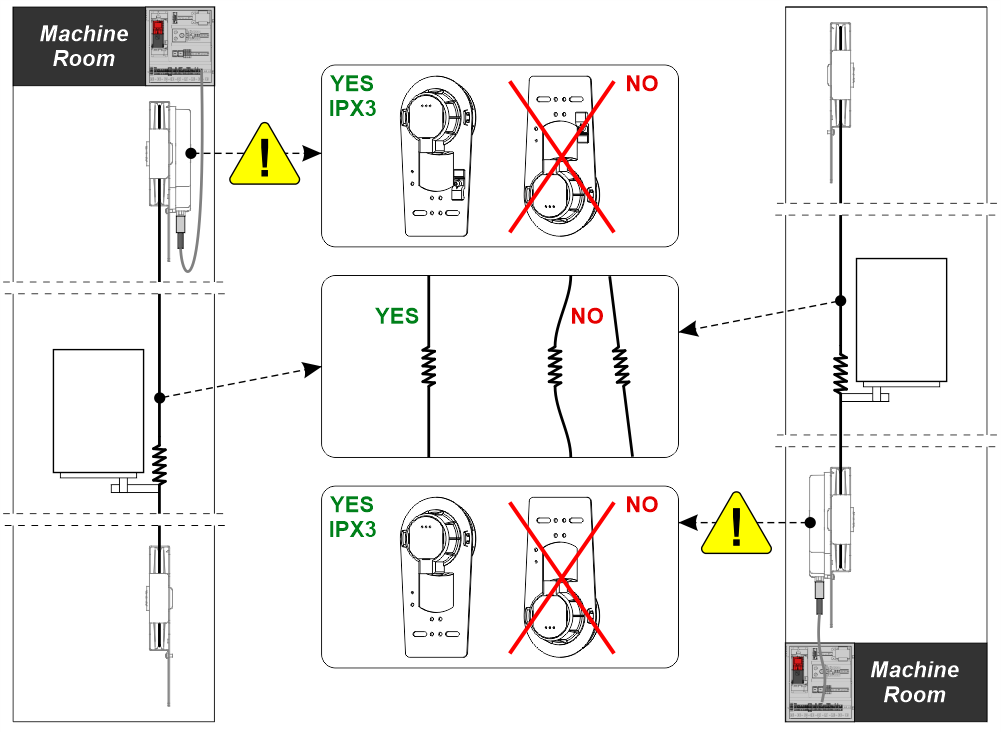
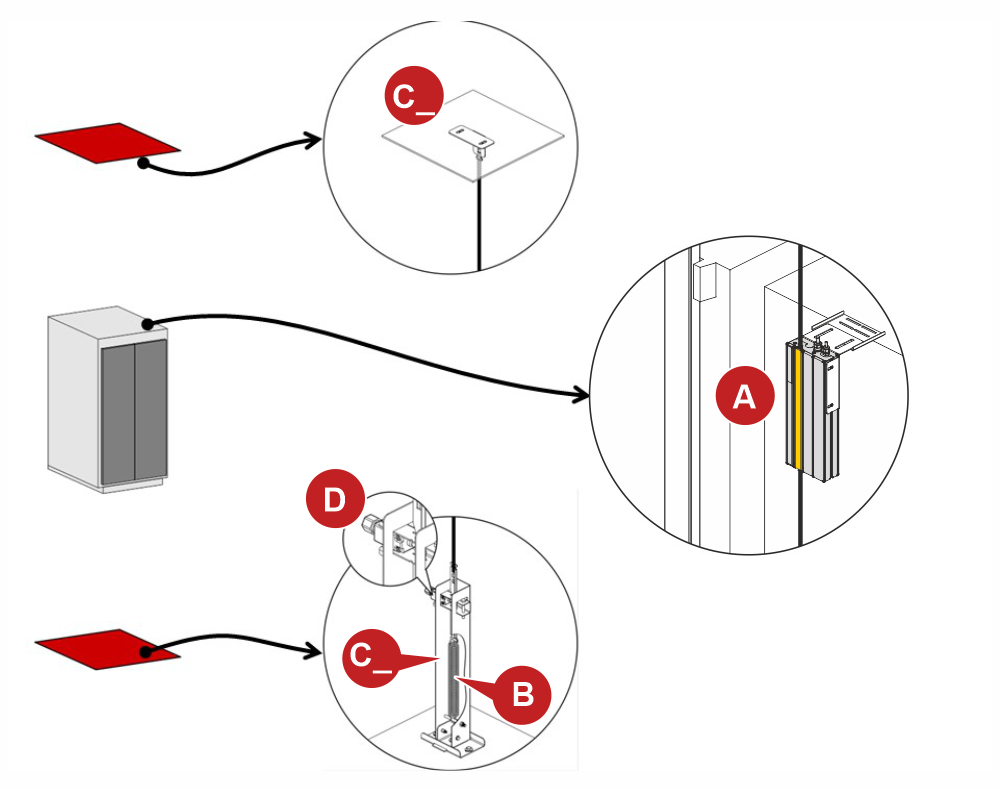
Composants du système
Cas 1 : Ascenseurs avec mécanique de châssis
Cas 2 : Ascenseurs avec mécanique de sac à dos
A) - C'est la poulie Encoder qui contient la carte électronique. Elle peut avoir 2 résolutions :
- 1,25 mm (100 PPR) pour l'encodeur marqué en rouge: A utiliser avec le Pitagora 4.0 armoire de manœuvre à partir de la version 3.0.2 du firmware.
- 2,5 mm (50 PPR) pour l'encodeur marqué en bleu: A utiliser avec les V3 / Musa / Pitagora 4.0 armoires de manœuvre jusqu'à la version Y du firmware
C) - Le tendeur à ressort peut également être monté sur le dessus de la cabine selon les besoins.
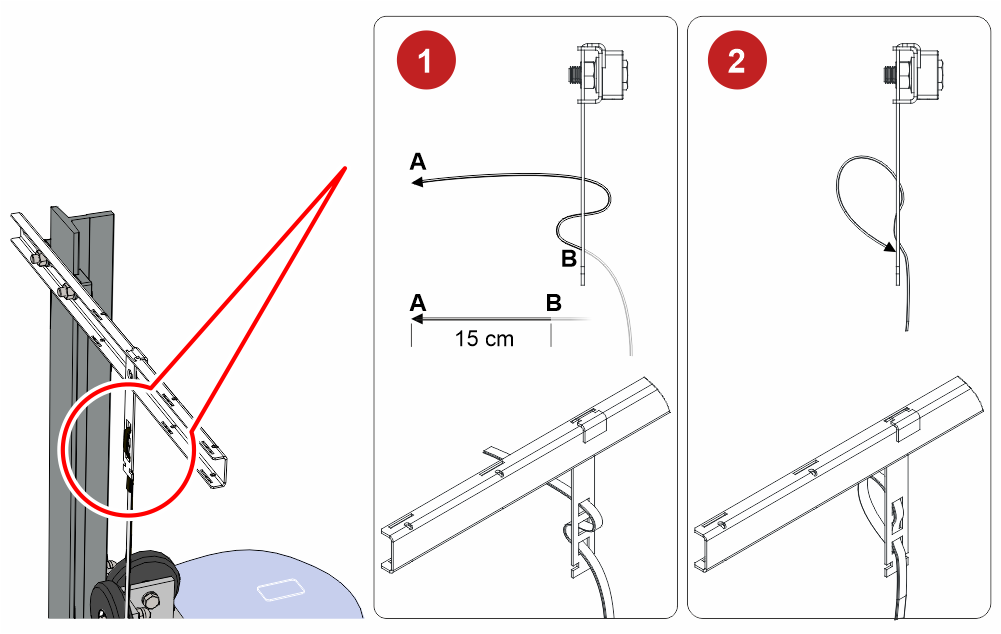
Montage
Le montage dépend de la mécanique de l'installation.
Cas 1 - Ascenseurs avec mécanique à châssis
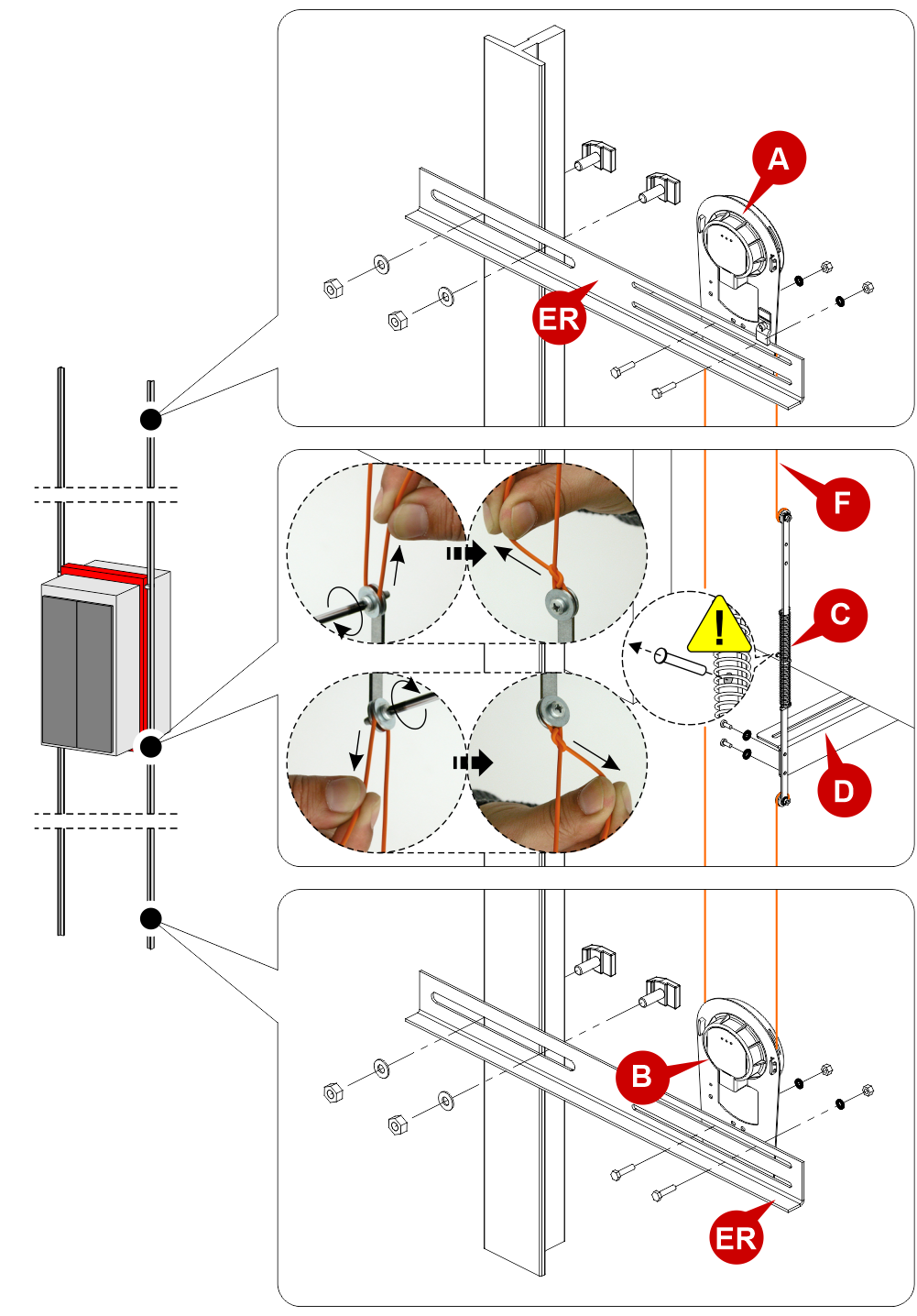
C) - Le tendeur de ressort peut également être monté sur le dessus de la cabine selon les besoins.
![]() Ne retirez le dispositif de retenue qu'une fois l'installation terminée.
Ne retirez le dispositif de retenue qu'une fois l'installation terminée.
En cas de remplacement sur des systèmes anciens, il sera nécessaire de détacher l'ancien câble et de le retendre après avoir assemblé le nouveau codeur.
Cas 2 - Ascenseurs avec mécanique à sac à dos
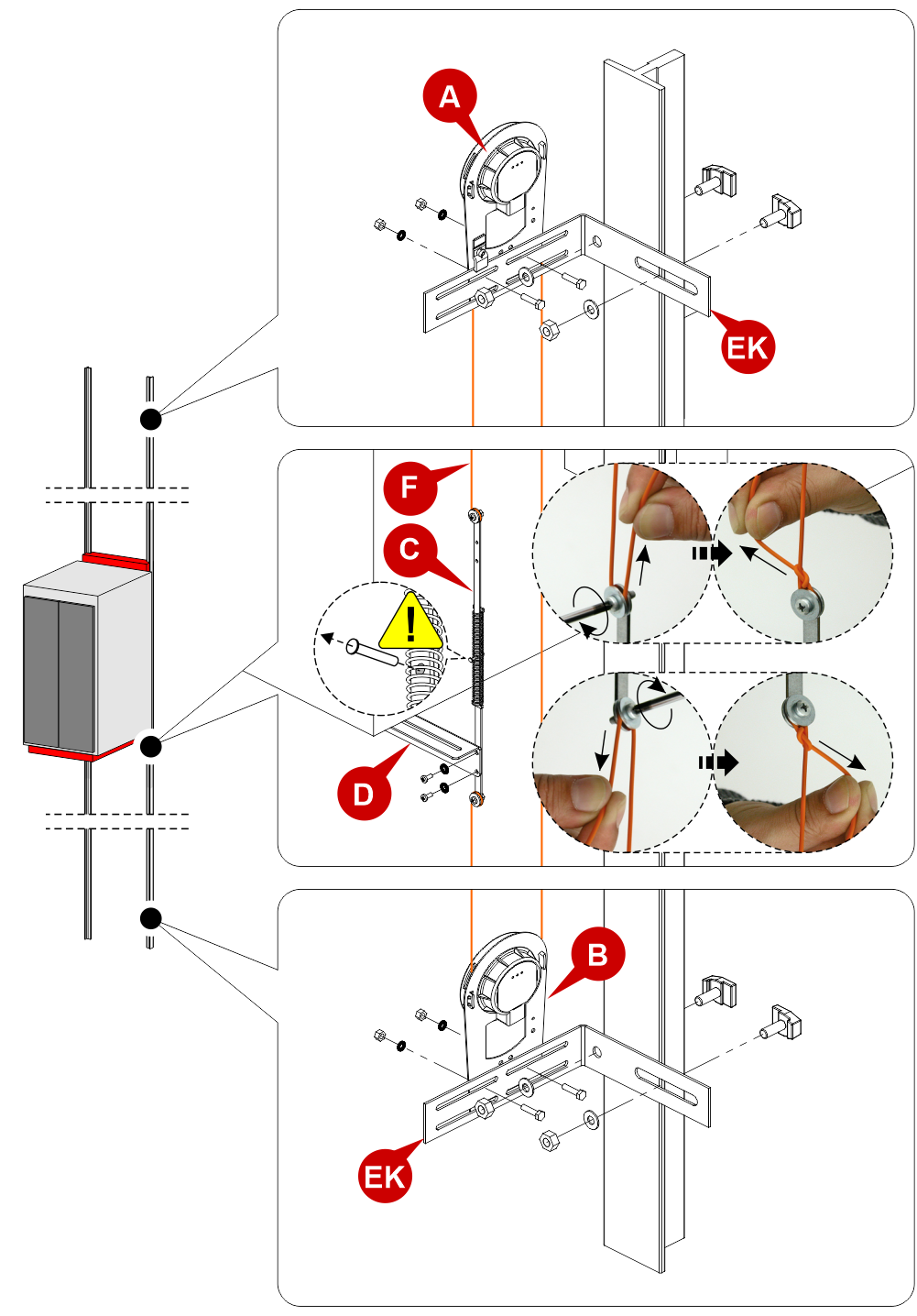
C) - Le tendeur de ressort peut également être monté sur le dessus de la cabine selon les besoins.
![]() Ne retirez le dispositif de retenue qu'une fois l'installation terminée.
Ne retirez le dispositif de retenue qu'une fois l'installation terminée.
En cas de remplacement sur des systèmes anciens, il sera nécessaire de détacher l'ancien câble et de le retendre après avoir assemblé le nouveau codeur.
Câblages
Connexion à Pitagora 4.0 armoire de manœuvre
- À partir de la version 3.0.2 du micrologiciel -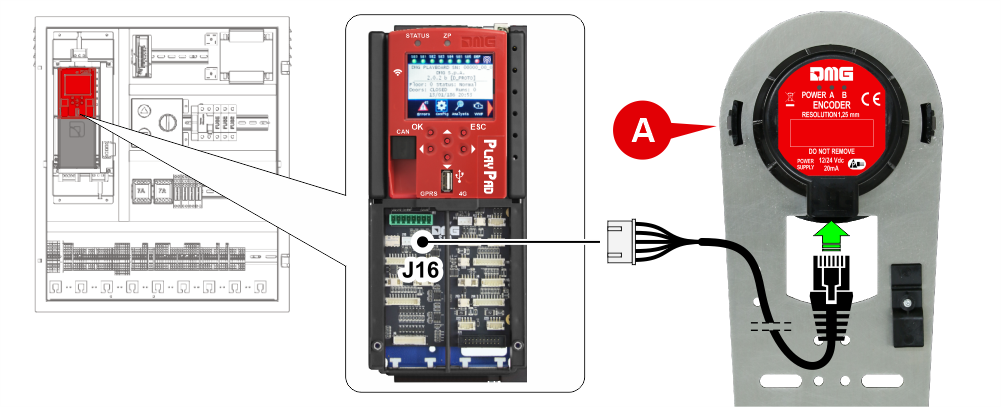 A) - Codeur avec une résolution de 1,25 mm
A) - Codeur avec une résolution de 1,25 mm
- Jusqu'à la version 3.0.1 du micrologiciel -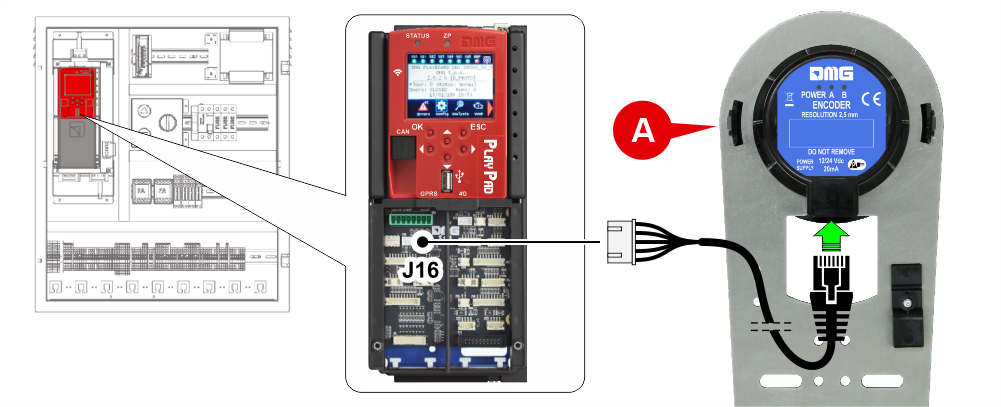 A) - Codeur avec une résolution de 2,50 mm
A) - Codeur avec une résolution de 2,50 mm
Connexion au système MUSA / PLAYBOARD V3 existant armoires de manœuvre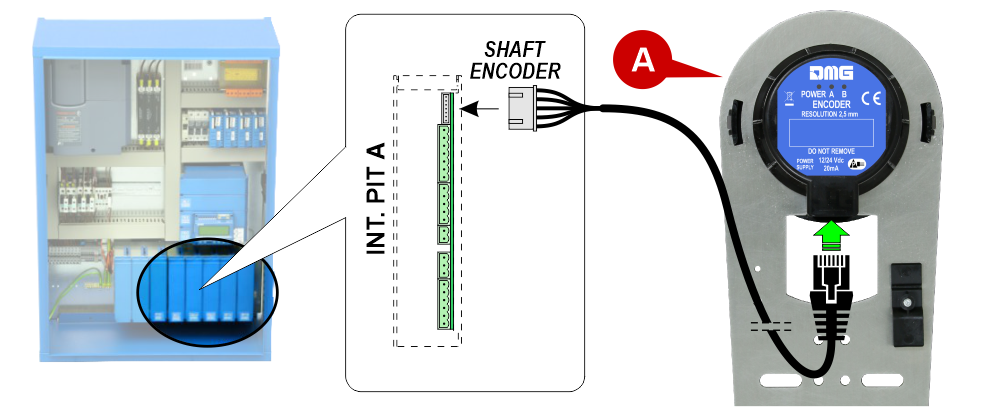
A) - Codeur avec une résolution de 2,50 mm
Vous pouvez remplacer le codeur à câble existant par le nouveau codeur magnétique (résolution de 2,50 mm).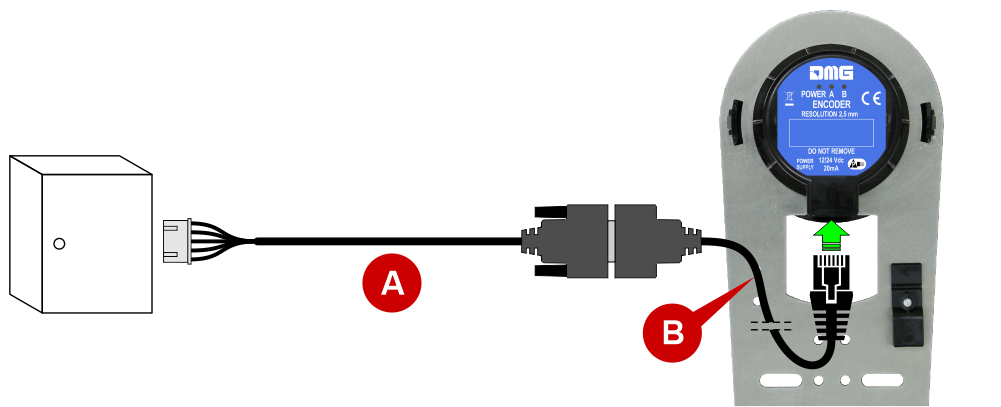
Il suffit de laisser le câble existant (A) et de le raccorder au nouveau codeur à l'aide d' un câble adaptateur (B).
Après avoir remplacé l'encodeur, vérifiez :
- Le sens de rotation correct en mode inspection (mouvement vers le haut, augmentation en mm, mouvement vers le bas, diminution en mm). Si nécessaire, modifiez le sens de rotation à partir du site armoire de manœuvre en suivant ces instructions :
- Mettez le panneau en opérations temporaires (menu Configuration -> Marche provisoire -> Oui) ;
- Modifier la rotation dans le menu System Positioning -> Positioning System -> clockwise/counterclockwise encoder (sens des aiguilles d'une montre/contre sens des aiguilles d'une montre);
- Supprimez les opérations temporaires (menu Configuration -> Marche provisoire -> Non).
- Vérifier l'alignement correct de la voiture sur tous les sites niveaux. Si nécessaire, réglez la précision d'arrêt à partir de armoire de manœuvre dans le menu System Positioning -> Niveau position.
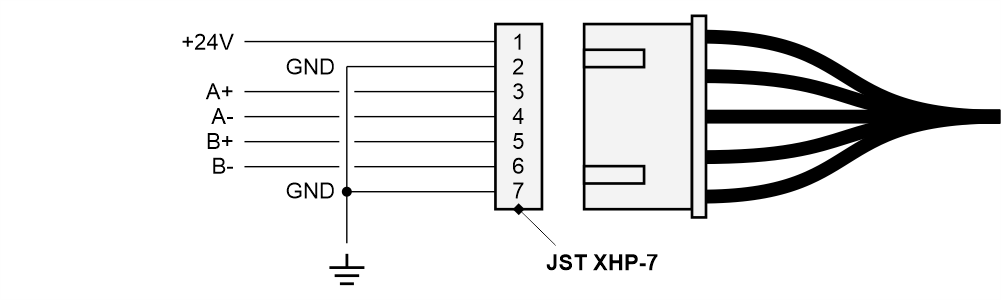
PIN OUT Connecteur JST 7 pôles
LED de diagnostic

POWER : Si la LED est allumée, le codeur est alimenté.
A/B : Etat des sorties du codeur. Lorsque la cabine est à l'arrêt, l'état de ces diodes ne change pas (elles peuvent être à la fois allumées et éteintes) ; lorsque la cabine est en mouvement, les diodes sont toutes deux allumées.
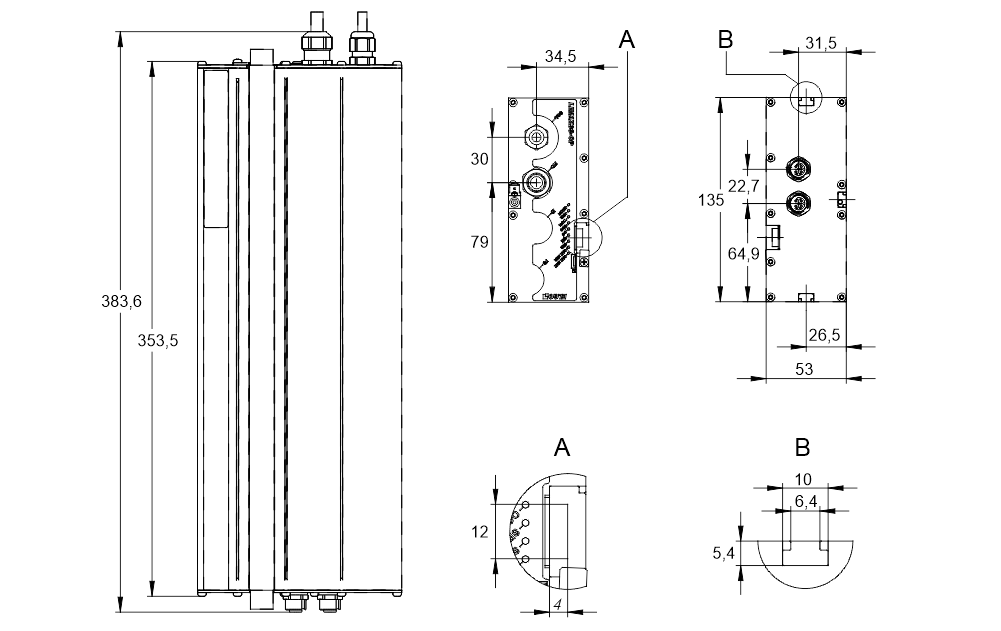
Codeur absolu (ELGO LIMAX 33 CP)
L'encodeur absolu permet de remplacer tous les contacts de sécurité à l'intérieur de la gaine'ascenseur. La position de la cabine est détectée grâce à une bande magnétique.
Installation
Dimensions :
Composants du système
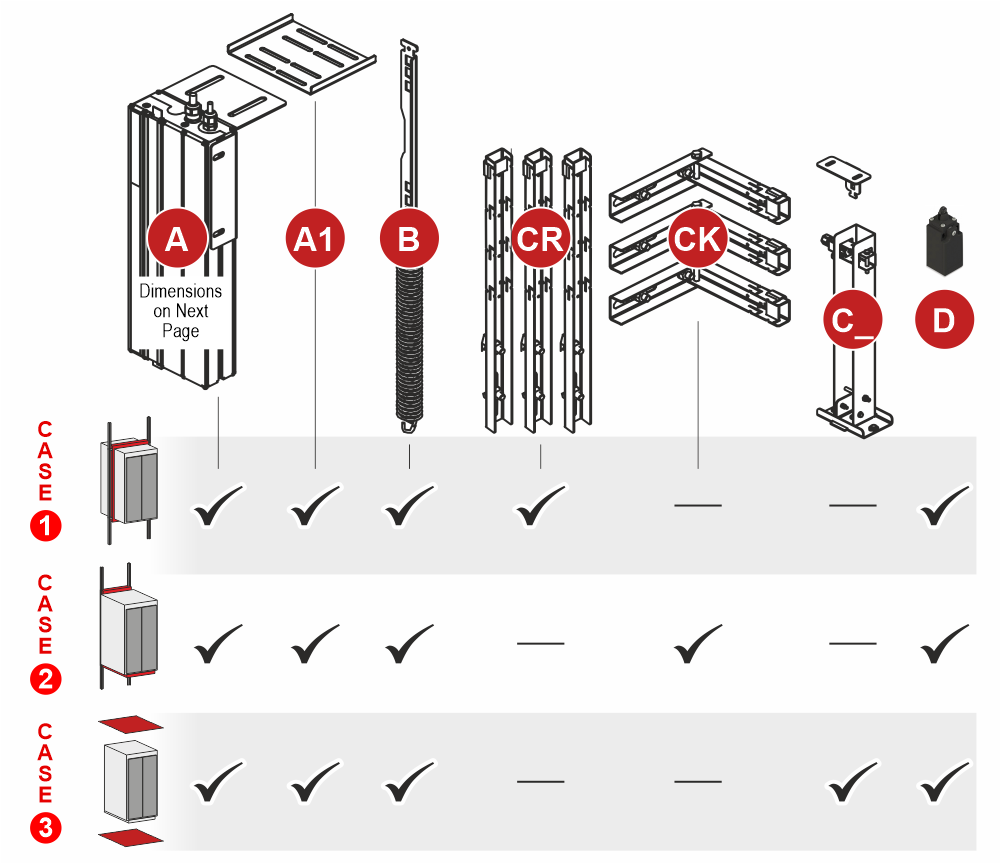
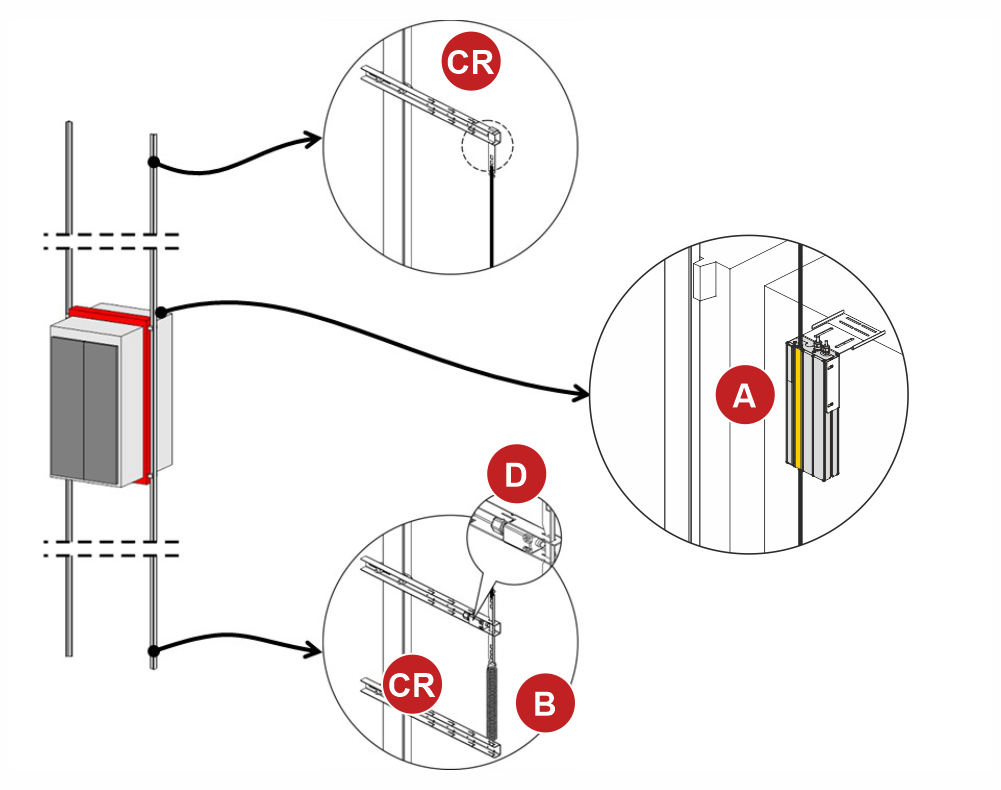
Cas 1 : Ascenseurs avec mécanique de châssis
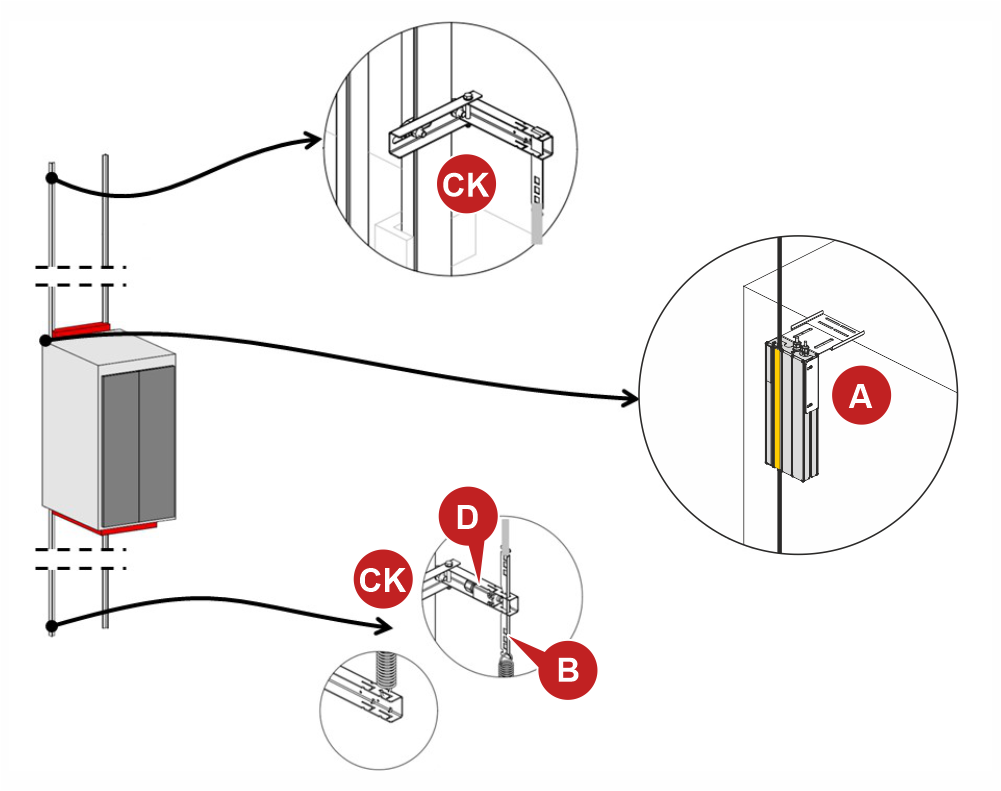
Cas 2 : Ascenseurs avec mécanique de sac à dos
Cas 3 : Fixation au sol et au plafond
Montage
Cas 1 - Ascenseurs avec mécanique à châssis
Cas 2 - Ascenseurs avec mécanique à sac à dos
Cas 3 - Fixation au sol et au plafond

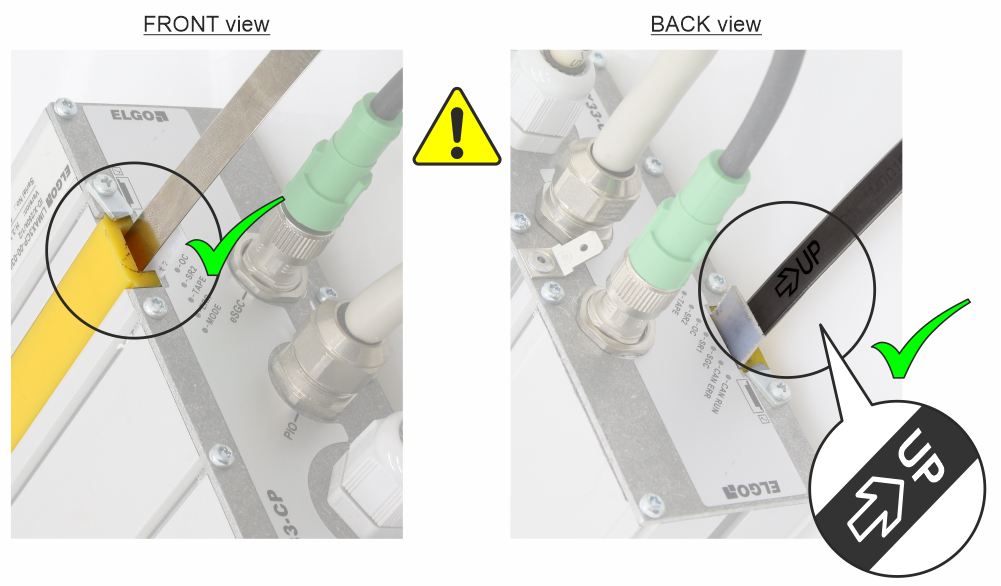
Veillez à positionner la bande magnétique comme indiqué dans les figures ci-dessous.
Positionnement correct de la bande magnétique![]() Retirez tous les aimants du compartiment avant d'installer la bande magnétique.
Retirez tous les aimants du compartiment avant d'installer la bande magnétique.
N'installez pas la bande magnétique à proximité de moteurs à aimant permanent.
N'utilisez pas d'outils magnétisés à proximité de la bande magnétique.
N'utilisez pas de matériel de soudage à proximité de la bande magnétique.
Respectez le raccord indiqué sur la bande et assurez-vous qu'il est dans la bonne position, comme le montre la figure suivante :
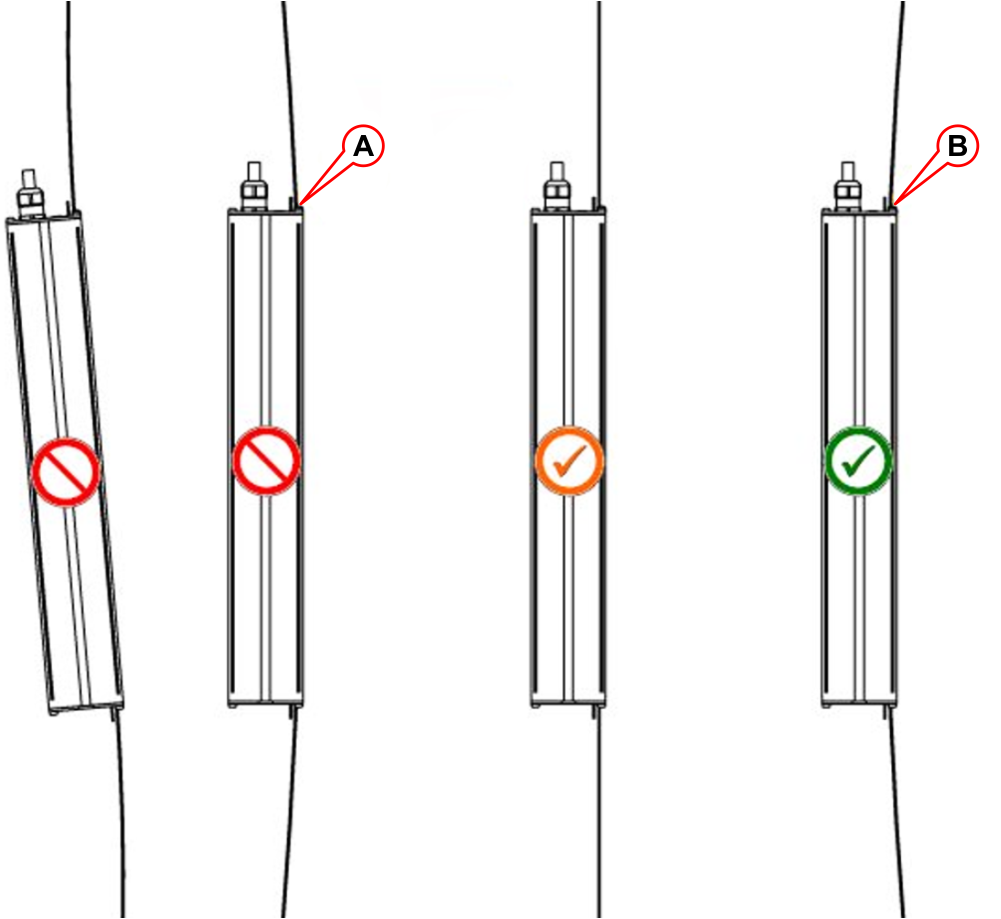
A) - Le ruban touche le guide par le côté magnétisé.
B) - Le ruban touche le guide par le côté acier.
Signalisations LED sur l'appareil

| LED | DESCRIPTION | |
|---|---|---|
| MODE | Mode normal | Clignotement lent (1 s) |
| Mode pré-commissionnement | Clignotement rapide (0,1 s) | |
| Mode d'apprentissage | S'allume en permanence | |
| ERREUR | Pas d'erreur | Led OFF |
| Erreur générique | Led ON | |
| Erreur d'urgence | Clignotant | |
| BANDE | Bande magnétique non détectée | Led ON |
| eSGC | Coordonnées de l'eSGC | Led ON |
| Contact eSGC ouvert | Led OFF | |
| OC | OC Contact fermer | Led ON |
| OC Contact ouvert | Led OFF | |
| SR1 | SR1 Contact fermer | Led ON |
| SR1 Contact ouvert | Led OFF | |
| SR2 | SR2 Contact fermer | Led ON |
| SR2 Contact ouvert | Led OFF | |
| CAN-ERR | État CAN ouvert | Led ON |
| CAN-RUN | Statut Can Open | Led OFF |
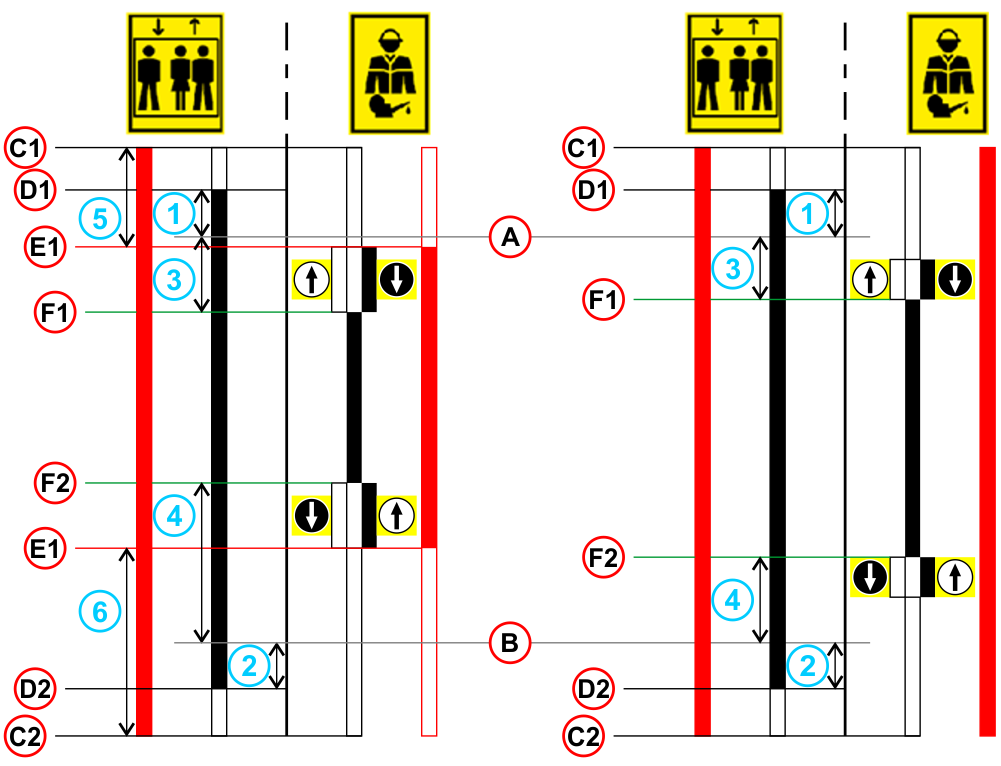
Explication des contacts de sécurité
| Installation d'une tête réduite et/ou d'un PIT réduit | Espace suffisant pour la tête et la fosse selon EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
 |
|||
 | Mode normal | A) - | TOP niveau |
 | Mode d'inspection | B) - | BOTTOM niveau |
 | État des contacts de sécurité | C1) - | Position de référence supérieure |
| Inspection Bouton UP | C2) - | Position de référence inférieure | |
| Inspection Bouton DOWN | D1) - | Interrupteur de fin de course supérieur | |
| Interrupteurs de fin de course Offset Up | D2) - | Interrupteur de fin de course inférieur | |
| Interrupteurs de fin de course Offset Down | E1) - | Limite supérieure du système d'arrêt pré-déclenché | |
| Interrupteurs de fin de course d'inspection Décalage vers le haut | E2) - | Limite inférieure du système d'arrêt pré-déclenché | |
| Interrupteurs de fin de course d'inspection Offset Down | F1) - | Interrupteur de limite supérieure d'inspection | |
| Système d'arrêt pré-déclenché Décalage vers le haut | F2) - | Interrupteur de fin de course d'inspection inférieur | |
| Système d'arrêt pré-déclenché Offset Down | |||
Le réglage manuel des positions indiquées est possible à partir du menu <Positioning> Monitor Encoder (voir tableau ci-dessous).
| Étiquette | Page | Description | |
|---|---|---|---|
| N_LIM_S | 7 | Décalage de l'interrupteur de fin de course supérieur (décalage par rapport au niveau supérieur) | |
| N_LIM_D | 7 | Décalage du commutateur de fin de course inférieur (décalage sous le niveau inférieur) | |
| I_LIM_S | 6 | Interrupteur de fin de course d'inspection supérieur (décalé sous le niveau supérieur) | |
| I_LIM_D | 6 | Interrupteur de fin de contrôle inférieur (décalage par rapport au niveau inférieur) | |
| ADPIC | 8 | Limite supérieure du système d'arrêt pré-déclenché (à partir de la position de référence supérieure) | |
| TRIPD | 8 | Limite inférieure du système d'arrêt pré-déclenché (à partir de la position de référence inférieure) |
Les valeurs TRIPS et TRIPD ne sont utilisées que si ELGO fait partie du système de sécurité pour tête et/ou fosse réduites (ELGO + eSGC).
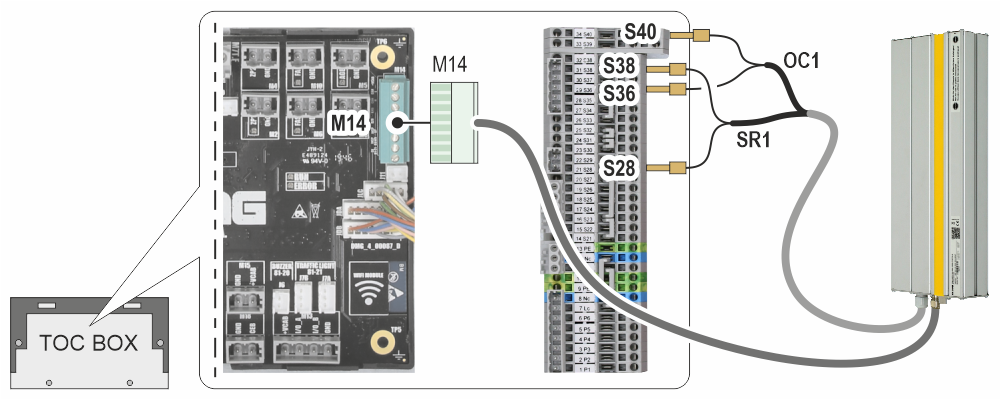
Câblages
Connexion à Pitagora 4.0 armoire de manœuvre
L'encodeur ELGO est connecté directement à la boîte TOC (top of cabin).
Tutoriel vidéo
Langue anglaise
Langue italienne