
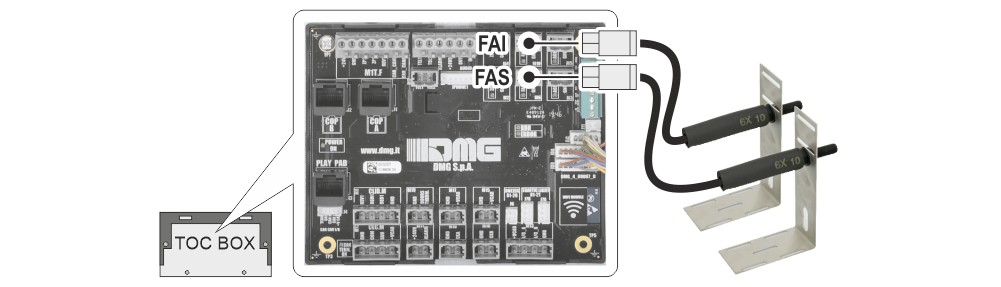
Magnetische Lesegeräte (FAI / FAS)
Dieses Zählsystem besteht aus zwei magnetischen Lesern (FAI-FAS) mit einem normalerweise offenen Kontakt, die auf zwei Halterungen auf der Kabinendecke montiert sind, und einem Satz Magneten, die auf den Höhenruderschienen angebracht sind.
Dieses Zählsystem kann verwendet werden, wenn die Eigenschaften des Systems die folgenden Bedingungen erfüllen:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Einrichtung

Fall A: Aufzüge mit Rahmenmechanik
Fall B: Aufzüge mit Rucksackmechanik
Zubehör für Sonderfälle
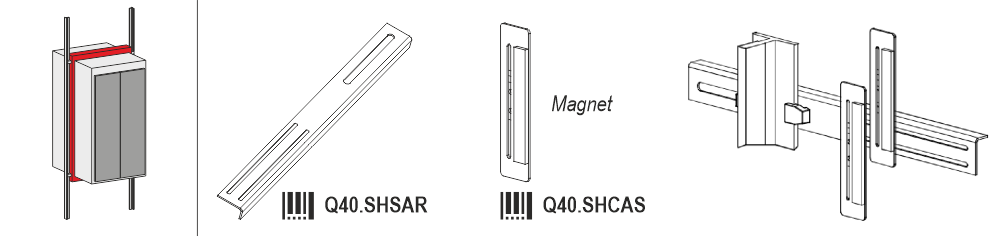
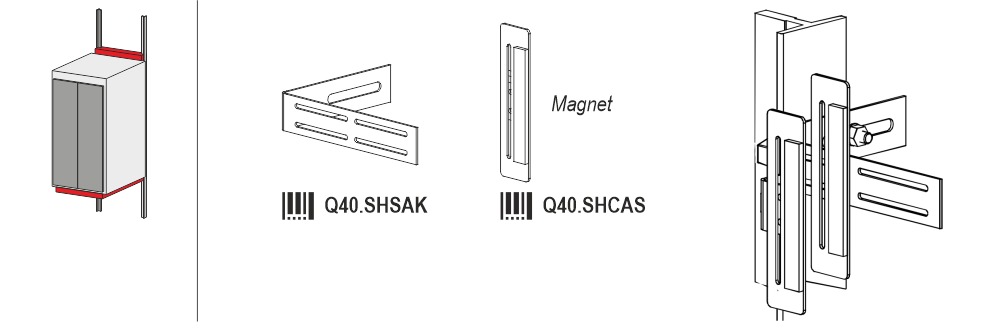
Positionierung von Magneten an Aufzugsführungen
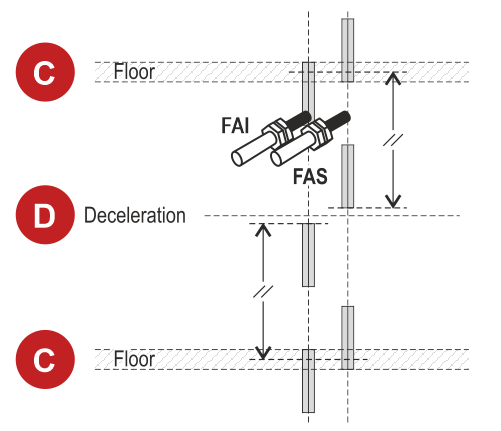
C) Etagen
D) Verlangsamung
Verkabelung
Die magnetischen Lesegeräte werden direkt an die TOC-Box (oben in der Kabine) angeschlossen.
Motor-Encoder
Dieses Zählsystem kann nur bei Systemen mit Geschwindigkeiten unter 2m/s und ohne Manöver mit offener Tür verwendet werden; es eignet sich nur für die folgenden optionalen Boards für Gearless-Motoren mit geschlossenem Regelkreis:
OPC-PR Q40.SCLSC - Encoder Sin Cos
OPC-PS Q40.SCLFL - Encoder En Dat
OPC-PSH Q40.SCLSCH - Encoder Sin Cos+Hiperface
Die steuerung verarbeitet die von den OPC-Karten übertragenen anzeigen und wandelt die Impulse in eine Zählung um.
Dieses Zählsystem hat eine Genauigkeit von etwa 1 Millimeter.

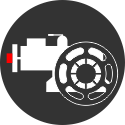
Magnetischer Seilzuggeber DMG
Der neue magnetische Encoder von DMG erfasst mit einem Sensor die Drehung und Position eines Magneten, der auf der Achse der Encoder-Riemenscheibe angebracht ist. Die erzeugten Impulse werden von der Aufzugsteuerung empfangen und verarbeitet, die die Position, Richtung und Geschwindigkeit des Fahrkorbs berechnet.
Einrichtung
Hinweise und Warnungen
Die Riemenscheibe, in die der Encoder eingebettet ist, muss oben im schacht oder in der Grube in der Nähe des Maschinenraums installiert werden.
Systemkomponenten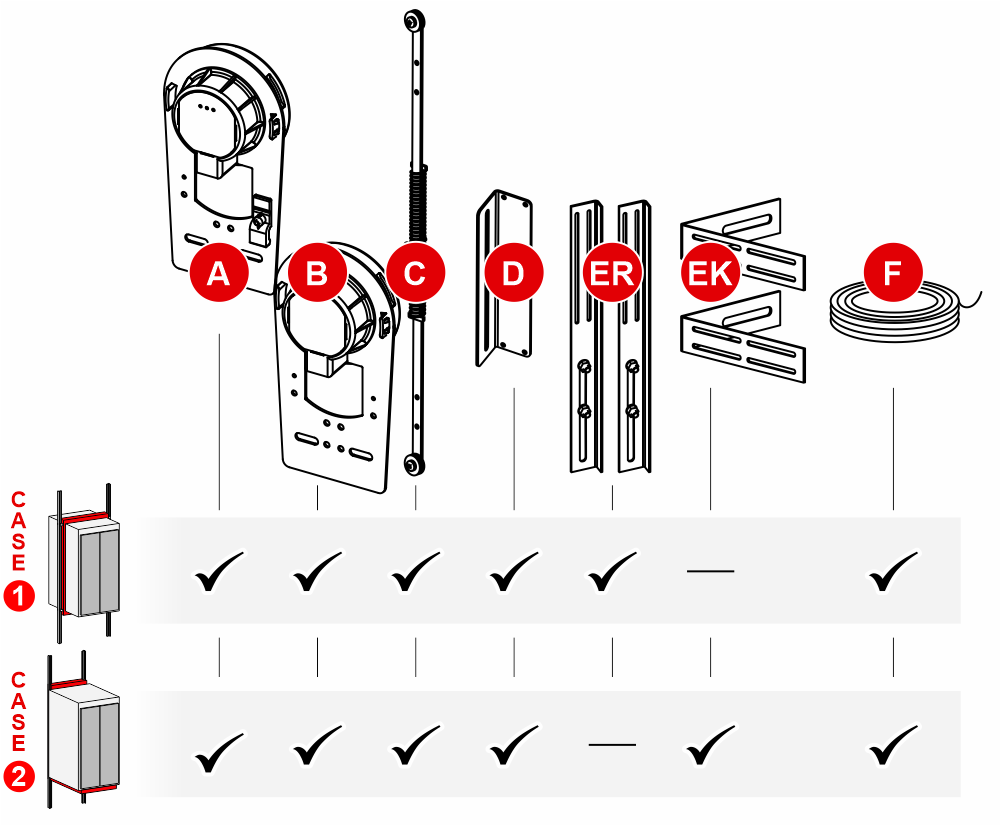
Fall 1: Aufzüge mit Rahmenmechanik
Fall 2: Aufzüge mit Rucksackmechanik
A) - Es handelt sich um die Encoder-Riemenscheibe, die die elektronische Karte enthält. Sie kann 2 Auflösungen haben:
- 1,25 mm (100 PPR) für den rot beschrifteten Encoder: Zu verwenden mit der Pitagora 4.0 steuerung ab Firmware Version 3.0.2
- 2,5 mm (50 PPR) für den blau beschrifteten Geber: Zur Verwendung mit den V3 / Musa / Pitagora 4.0 steuerungen bis zur Firmware Y Version
C) - Der Federspanner kann bei Bedarf auch oben auf der Kabine montiert werden.
Montage
Die Montage hängt von der Mechanik der Anlage ab.
Fall 1 - Aufzüge mit Rahmenmechanik
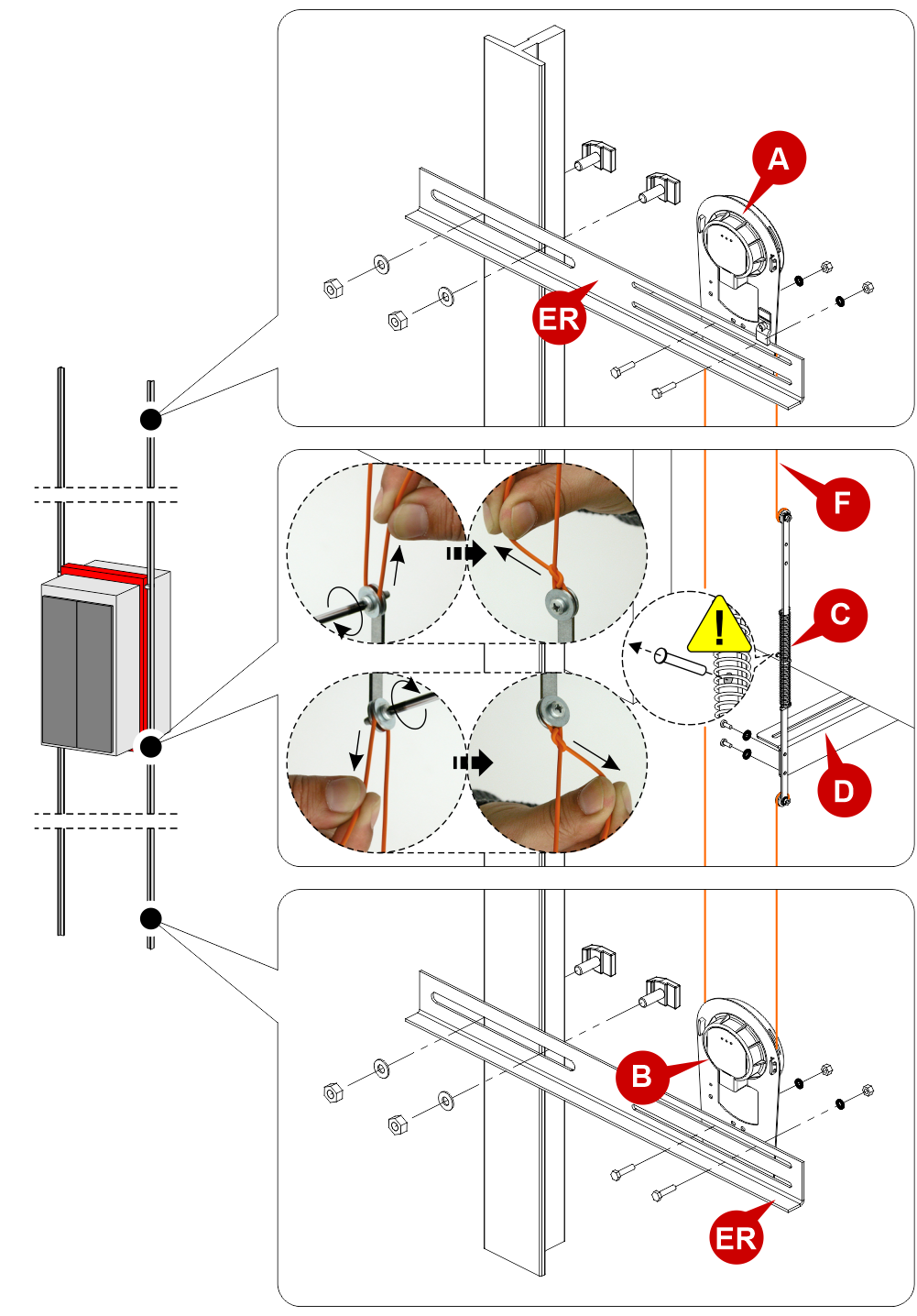
C) - Der Federspanner kann je nach Bedarf auch auf der Oberseite der Kabine montiert werden.
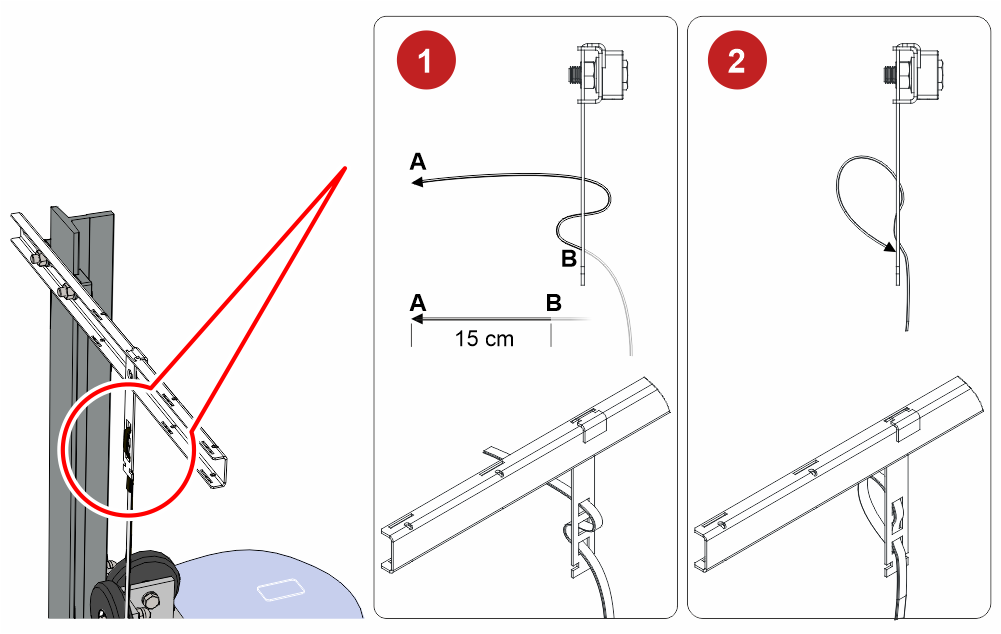
![]() Entfernen Sie die Halterung erst nach Abschluss der Installation.
Entfernen Sie die Halterung erst nach Abschluss der Installation.
Im Falle eines Austausches bei alten Anlagen muss das alte Seil gelöst und nach der Montage des neuen Gebers neu gespannt werden.
Fall 2 - Aufzüge mit Rucksackmechanik
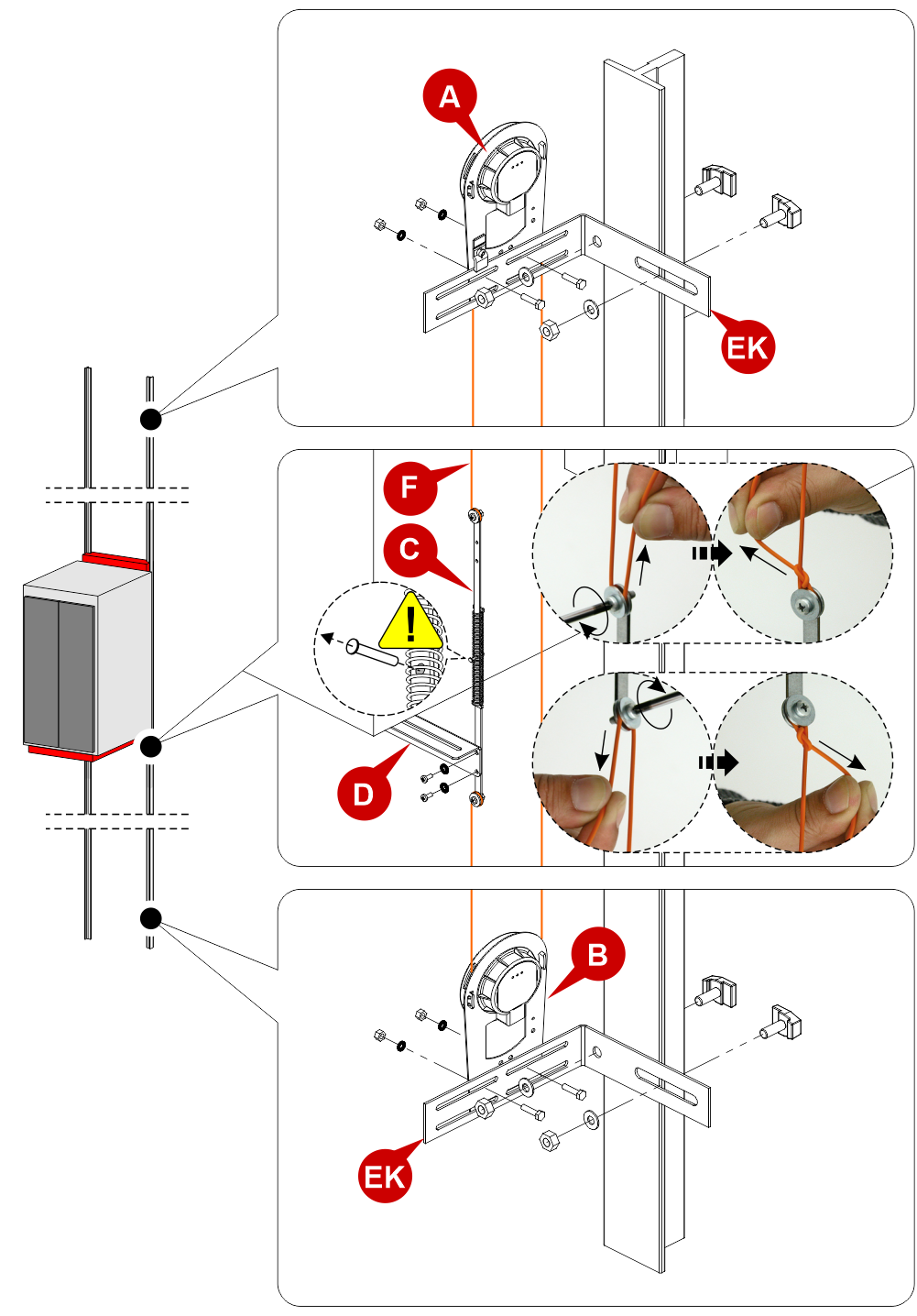
C) - Der Federspanner kann je nach Bedarf auch auf der Oberseite der Kabine montiert werden.
![]() Entfernen Sie die Halterung erst nach Abschluss der Installation.
Entfernen Sie die Halterung erst nach Abschluss der Installation.
Im Falle eines Austausches bei alten Anlagen muss das alte Seil gelöst und nach der Montage des neuen Gebers neu gespannt werden.
Verkabelung
Verbindung zu Pitagora 4.0 steuerung
- Ab der Firmware-Version 3.0.2 -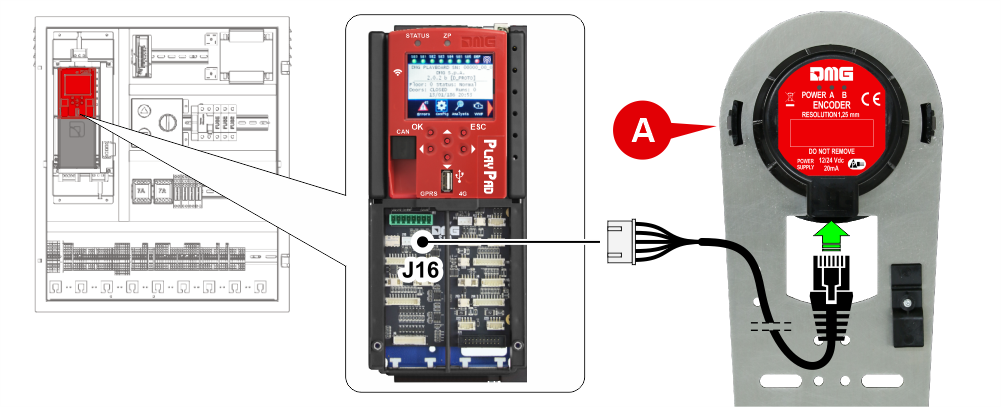 A) - Drehgeber mit 1,25 mm Auflösung
A) - Drehgeber mit 1,25 mm Auflösung
- Bis zur Firmware-Version 3.0.1 -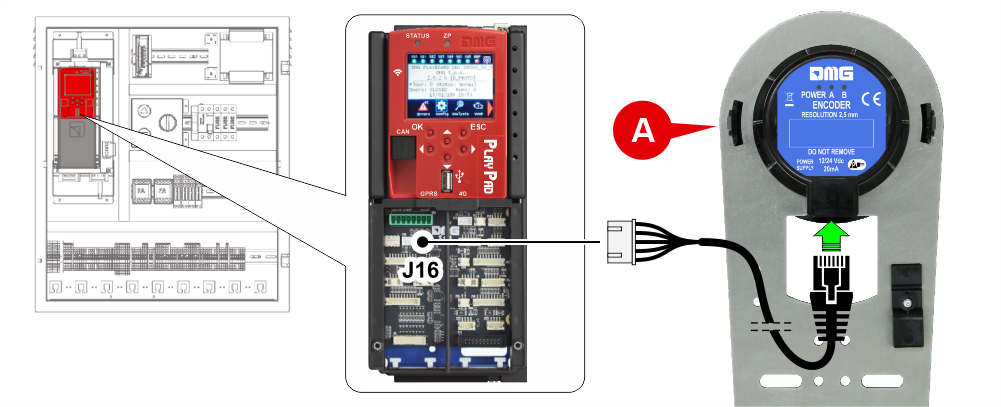 A) - Drehgeber mit 2,50 mm Auflösung
A) - Drehgeber mit 2,50 mm Auflösung
Anschluss an vorhandene MUSA / PLAYBOARD V3 steuerungen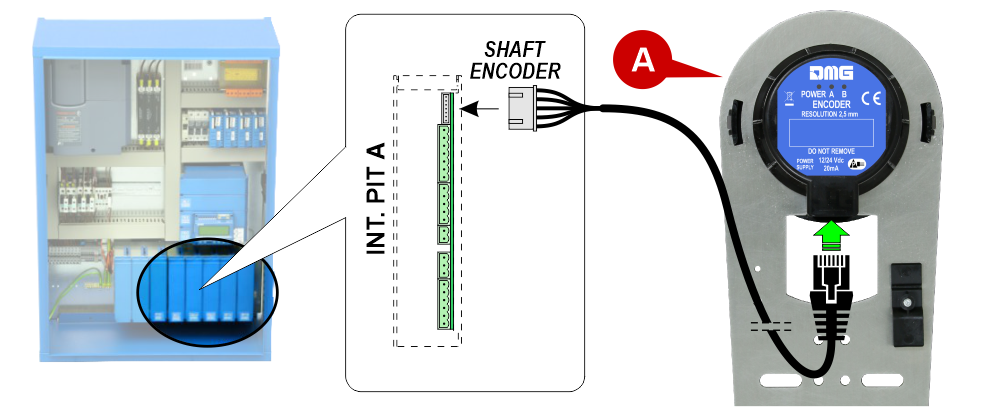
A) - Drehgeber mit 2,50 mm Auflösung
Sie können den vorhandenen Seilzuggeber durch den neuen magnetischen Geber (2,50 mm Auflösung) ersetzen.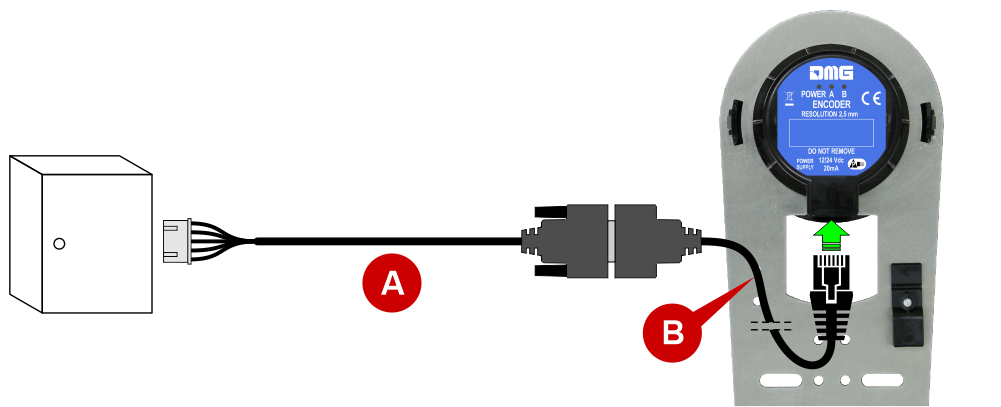
Belassen Sie einfach das vorhandene Kabel (A) und schließen Sie es mit einem Adapterkabel (B) an den neuen Encoder an.
Prüfen Sie nach dem Austausch des Encoders:
- Die richtige Drehrichtung im Inspektionsmodus (Aufwärtsbewegung, Zunahme in mm, Abwärtsbewegung, Abnahme in mm). Ändern Sie bei Bedarf die Drehrichtung auf der Website steuerung , indem Sie diese Anweisungen befolgen:
- Stellen Sie das Bedienfeld unter Temporäre Operationen ein (Menü Konfiguration -> Temporäre Operationen -> Ja);
- Ändern Sie die Drehung im Menü Systempositionierung -> Positioniersystem -> Uhrzeigersinn/Linksdrehung;
- Entfernen Sie die Temporären Operationen (Menü Grundparameter -> Inbetriebnahme -> Nein).
- Überprüfen Sie die korrekte Ausrichtung des Fahrzeugs auf allen etagen. Passen Sie gegebenenfalls die Anhaltegenauigkeit über steuerung im Menü Systempositionierung -> Etage Position.
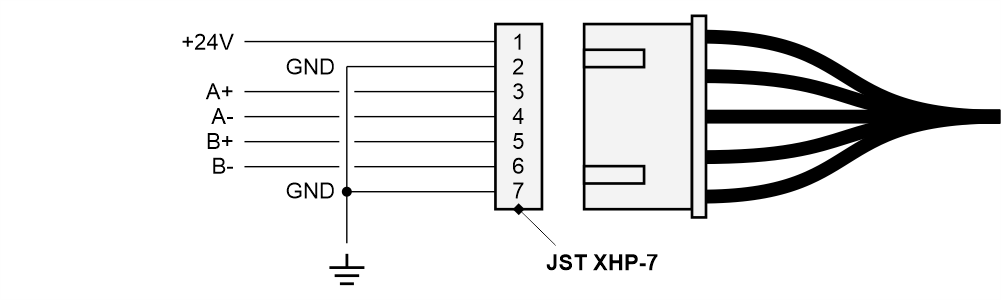
PIN OUT JST 7-poliger Stecker
Diagnose-LED

POWER: Wenn die LED leuchtet, ist der Encoder eingeschaltet.
A/B: Status der Encoderausgänge. Wenn der Fahrkorb steht, ändert sich der Status dieser LEDs nicht (sie können sowohl EIN als auch AUS sein); wenn der Fahrkorb in Bewegung ist, leuchten beide LEDs.
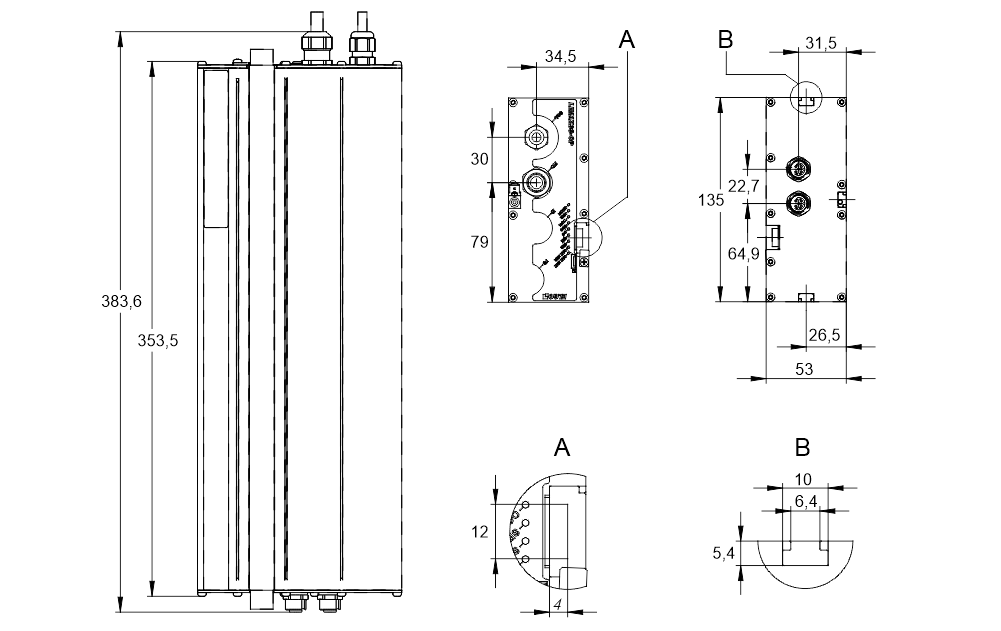
Absoluter Drehgeber (ELGO LIMAX 33 CP)
Der Absolutwertgeber ermöglicht es, alle Sicherheitskontakte im Inneren des schacht zu ersetzen. Die Position der Kabine wird dank eines Magnetstreifens erfasst.
Einrichtung
Abmessungen:
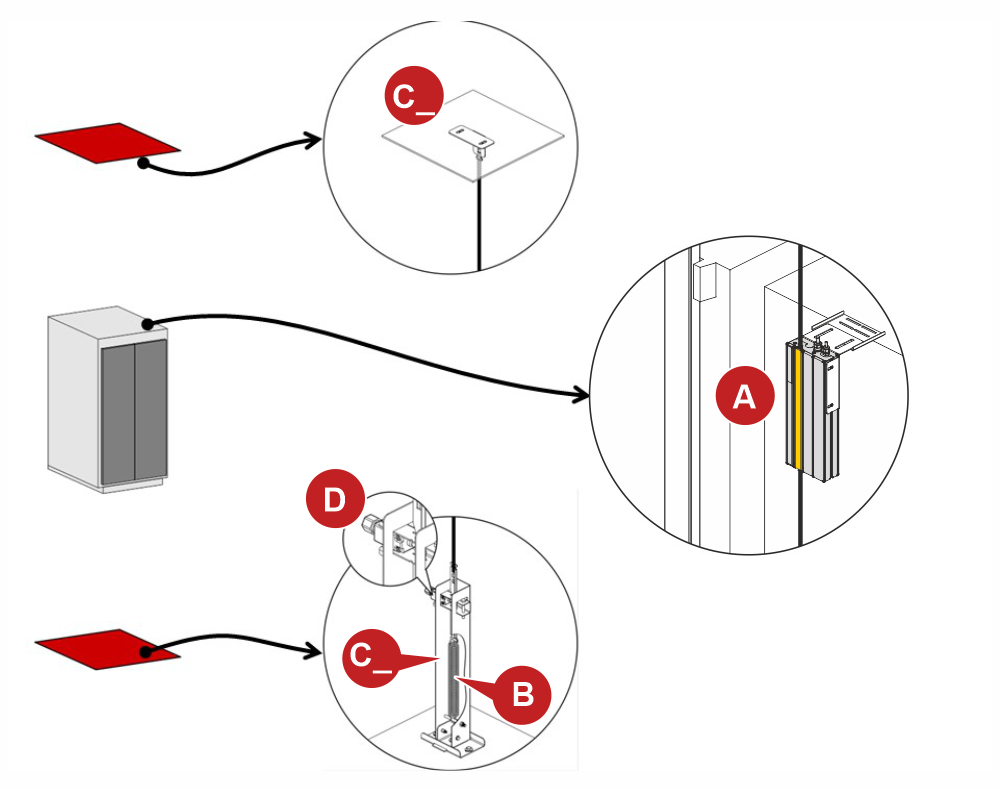
Systemkomponenten
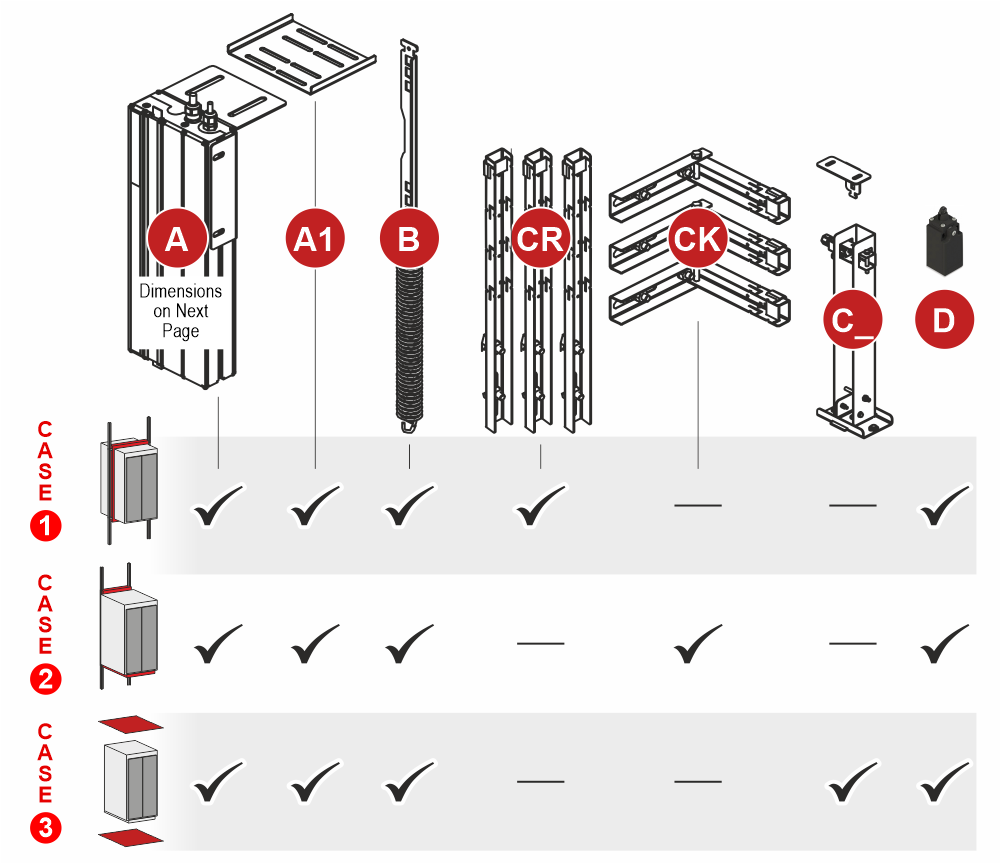
Fall 1: Aufzüge mit Rahmenmechanik
Fall 2: Aufzüge mit Rucksackmechanik
Fall 3: Boden- und Deckenbefestigung
Montage
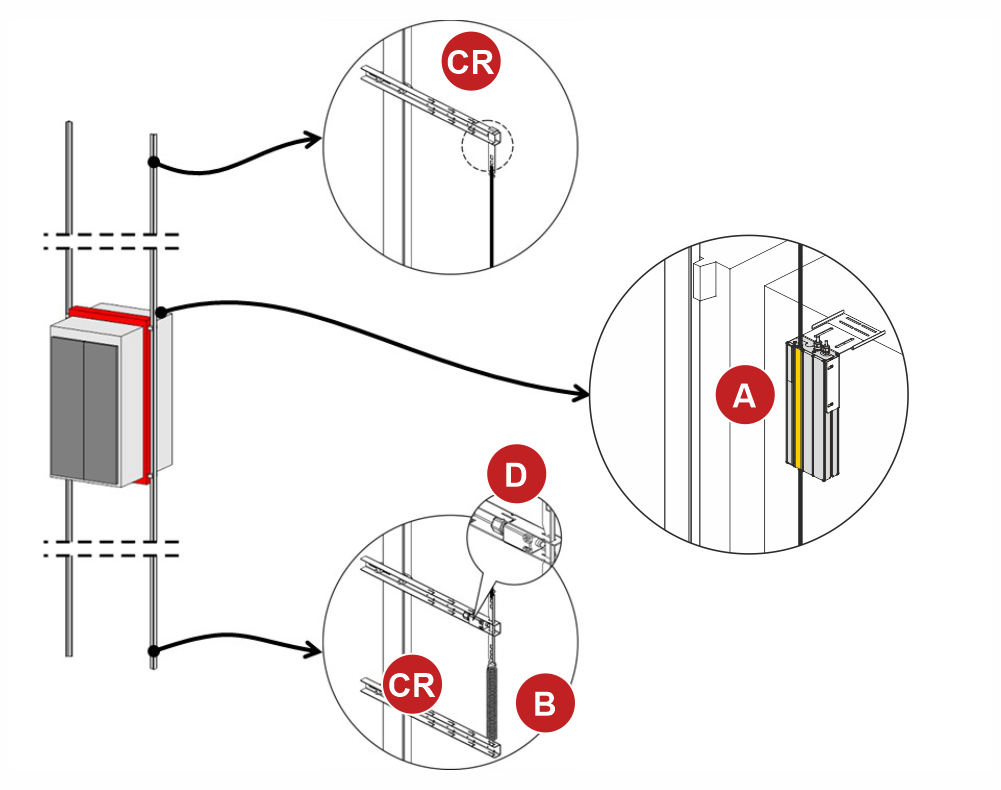
Fall 1 - Aufzüge mit Rahmenmechanik
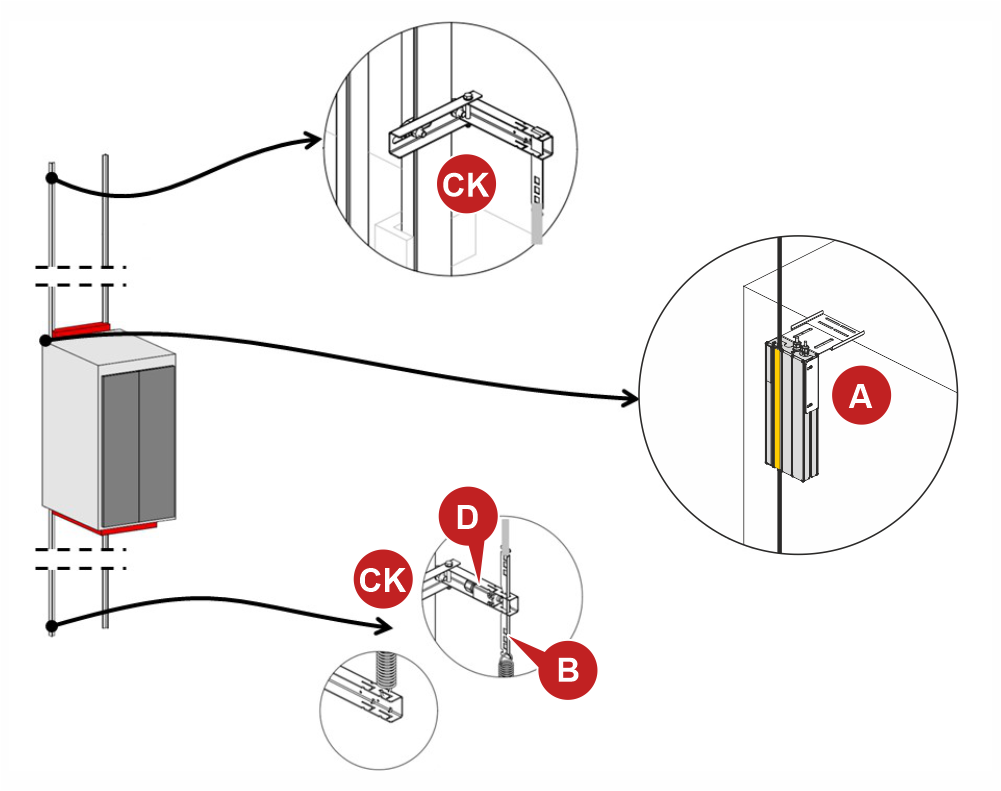
Fall 2 - Aufzüge mit Rucksackmechanik
Fall 3 - Boden- und Deckenbefestigung

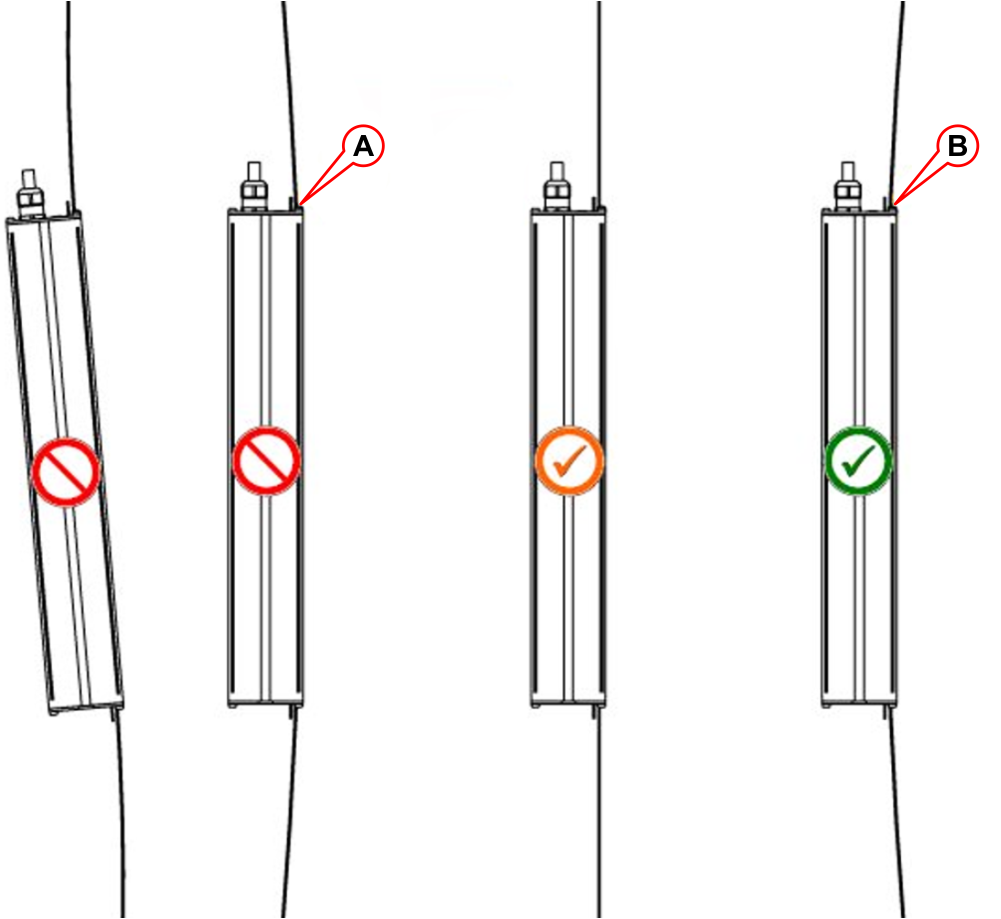
Achten Sie darauf, den Magnetstreifen wie in den Abbildungen unten gezeigt zu positionieren.
Korrekte Positionierung des Magnetbandes![]() Entfernen Sie alle Magnete im Fach, bevor Sie das Magnetband anbringen.
Entfernen Sie alle Magnete im Fach, bevor Sie das Magnetband anbringen.
Installieren Sie das Magnetband nicht in der Nähe von Dauermagnetmotoren.
Verwenden Sie keine magnetisierten Werkzeuge in der Nähe des Magnetbandes.
Verwenden Sie keine Schweißgeräte in der Nähe des Magnetbandes.
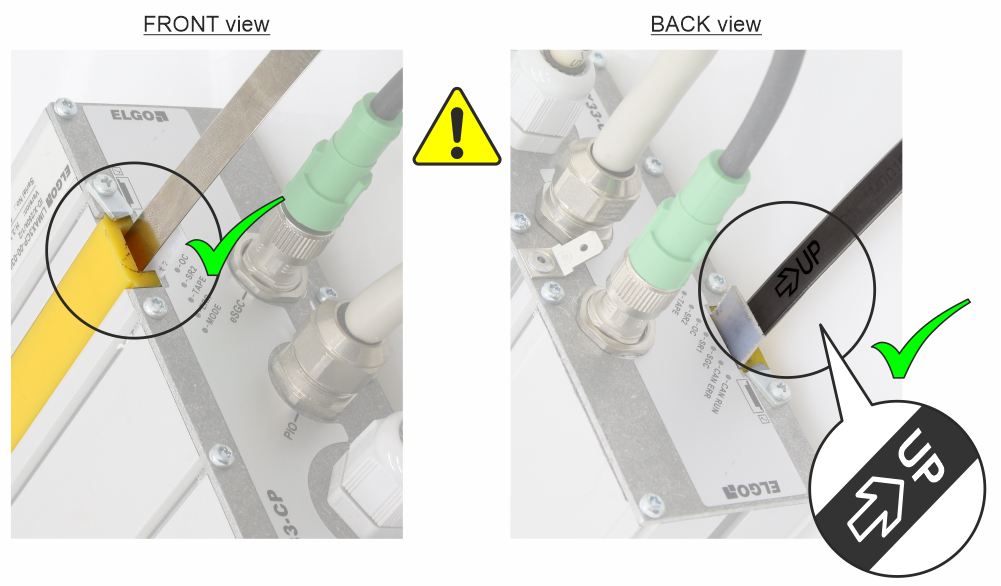
Achten Sie auf die auf dem Band angegebene Befestigung und stellen Sie sicher, dass sie sich in der richtigen Position befindet, wie in der folgenden Abbildung gezeigt:
A) - Das Band berührt die Führung mit der magnetisierten Seite.
B) - Das Band berührt die Führung mit der Stahlseite.
Anzeige am Gerät

| LED | BESCHREIBUNG | |
|---|---|---|
| MODUS | Normaler Modus | Langsames Blinken (1 s) |
| Vor-Inbetriebnahme-Modus | Schnelles Blinken (0,1 s) | |
| Teach-Modus | Leuchtet permanent | |
| ERROR | Kein Fehler | Led AUS |
| Allgemeiner Fehler | Led ON | |
| Notfall-Fehler | Blinkend | |
| TAPE | Magnetband nicht erkannt | Led ON |
| eSGC | eSGC Kontakt schließen | Led ON |
| eSGC Kontakt Offen | Led AUS | |
| OC | OC Kontakt schließen | Led ON |
| OC Kontakt Offen | Led AUS | |
| SR1 | SR1 Kontakt schließen | Led ON |
| SR1 Kontakt offen | Led AUS | |
| SR2 | SR2 Kontakt schließen | Led ON |
| SR2 Kontakt offen | Led AUS | |
| CAN-ERR | Status CAN Offen | Led ON |
| CAN-RUN | Status Dose öffnen | Led AUS |
Erläuterung der Sicherheitskontakte
| Reduzierte Förderhöhe und/oder reduzierte PIT-Installation | Ausreichende Kopf- und Grubenfreiheit gemäß EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
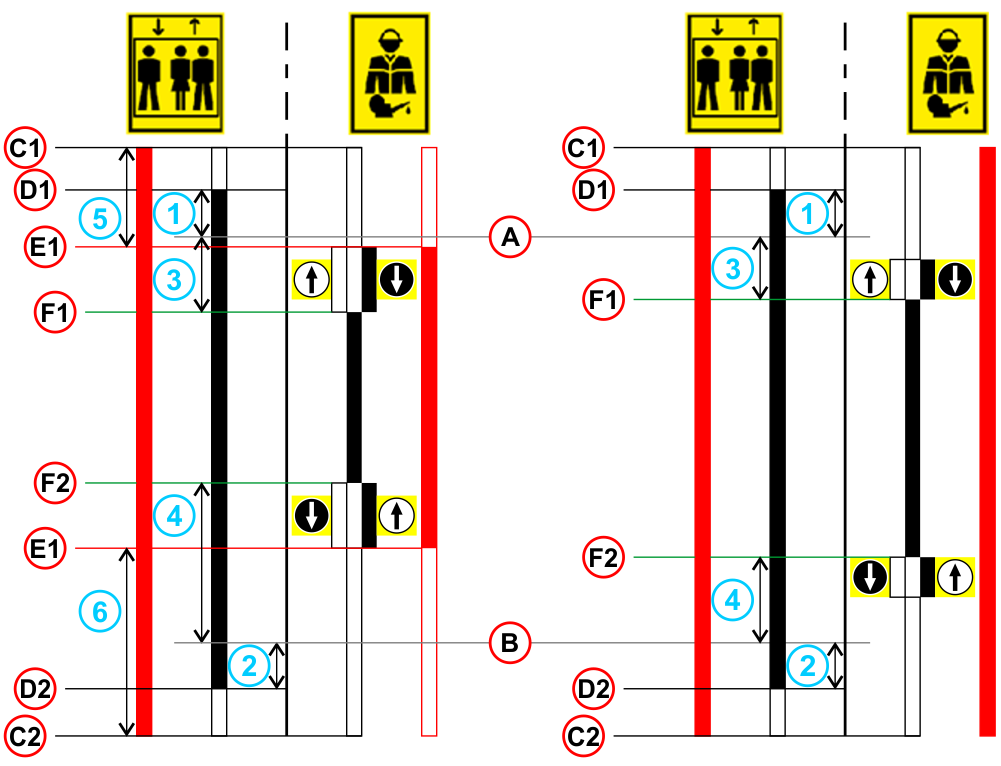 |
|||
 | Normaler Modus | A) - | TOP etage |
 | Inspektionsmodus | B) - | BOTTOM etage |
 | Status der Sicherheitskontakte | C1) - | Obere Referenzposition |
| Taste Inspektion UP | C2) - | Untere Referenzposition | |
| Inspektion Taste DOWN | D1) - | Oberer Endschalter | |
| Endlagenschalter Offset Up | D2) - | Unterer Endschalter | |
| Endlagenschalter Offset Down | E1) - | Oberer Grenzwert des vorgetriggerten Anhaltesystems | |
| Inspektionsendschalter Offset Up | E2) - | Unterer Grenzwert des vorgetriggerten Anhaltesystems | |
| Inspektionsendschalter Offset Down | F1) - | Oberer Inspektionsgrenzschalter | |
| Pre-Triggered Stopping System Offset Up | F2) - | Unterer Inspektionsgrenzschalter | |
| Pre-Triggered Stopping System Offset Down | |||
Für die manuelle Einstellung der Positionen der angezeigten ist möglich von Menü <Positioning> Monitor Encoder (siehe Tabelle unten).
| Etikett | Seite | Beschreibung | |
|---|---|---|---|
| N_LIM_S | 7 | Offset des oberen Endschalters (Offset über der oberen etage) | |
| N_LIM_D | 7 | Offset des unteren Endschalters (Offset unter der unteren etage) | |
| I_LIM_S | 6 | Oberer Inspektionsendschalter (versetzt unter der oberen etage) | |
| I_LIM_D | 6 | Unterer Inspektionsendschalter (Versatz über untere etage) | |
| TRIPS | 8 | Oberer Grenzwert des vorgetriggerten Anhaltesystems (ab oberer Referenzposition) | |
| TRIPD | 8 | Unterer Grenzwert des vorgetriggerten Stoppsystems (ab unterer Referenzposition) |
TRIPS- und TRIPD-Werte werden nur verwendet, wenn ELGO Teil des Sicherheitssystems für reduzierte Förderhöhe und/oder Grube (ELGO + eSGC) ist.
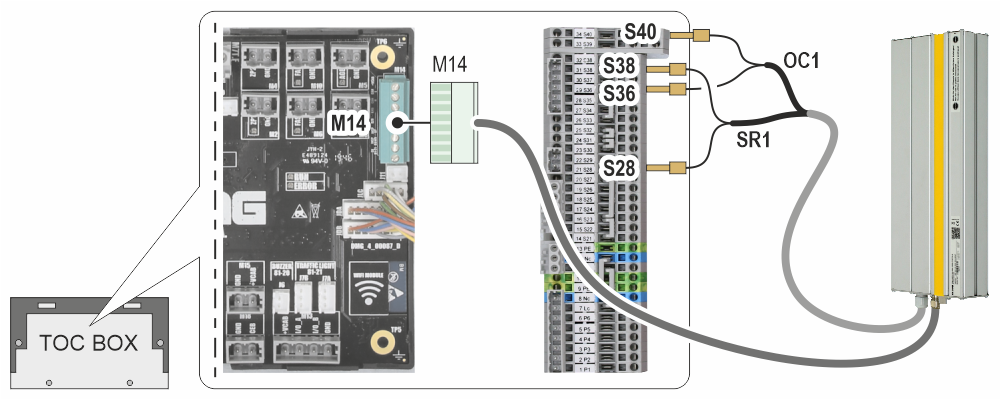
Verkabelung
Verbindung zu Pitagora 4.0 steuerung
Der ELGO-Geber wird direkt an die TOC-Box (Top of Cabin) angeschlossen
Video-Anleitung
Englische Sprache
Italienische Sprache