
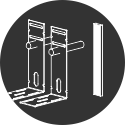
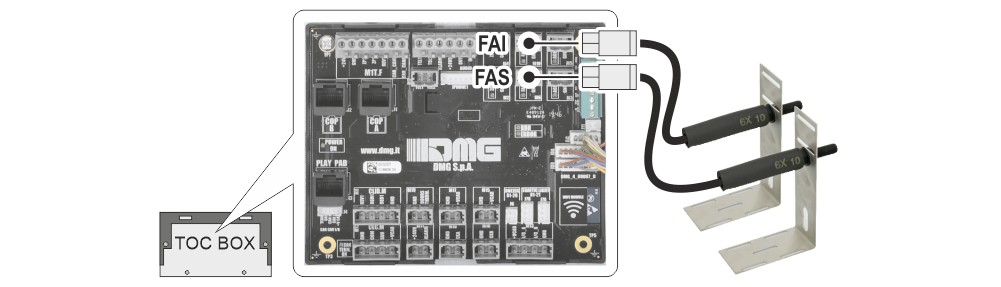
Lectores magnéticos (FAI / FAS)
Este sistema de conteo consta de dos lectores magnéticos (FAI-FAS) con un contacto normalmente abierto montados en dos soportes colocados en la parte superior de la cabina, y un conjunto de imanes colocados en los raíles del elevador.
Este sistema de conteo puede utilizarse cuando las características del sistema cumplen las siguientes condiciones:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Instalación

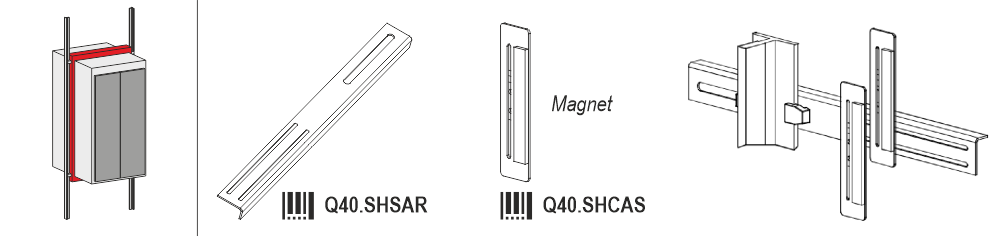
Caso A : Ascensores con mecánica de bastidor
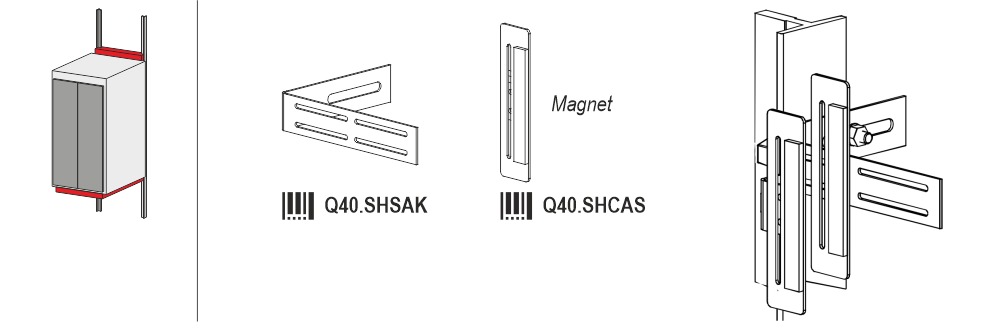
Caso B : Ascensores con mecánica de mochila
Accesorios para casos especiales
Posicionamiento de los imanes en las guías del elevador
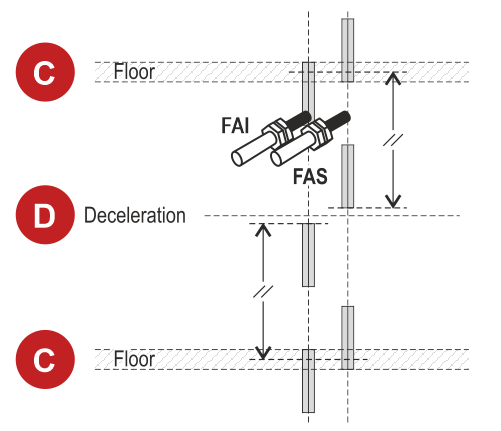
C) Pisos
D) Desaceleración
Cableados
Los lectores magnéticos se conectan directamente a la caja TOC (parte superior de la cabina)
Codificador del motor
Este sistema de recuento sólo se puede utilizar en sistemas con velocidades inferiores a 2 m/s y sin maniobras a puerta abierta; sólo es adecuado para las siguientes tarjetas opcionales para motorreductores Gearless con sistemas de bucle cerrado:
OPC-PR Q40.SCLSC - Encoder Sin Cos
OPC-PS Q40.SCLFL - Encoder En Dat
OPC-PSH Q40.SCLSCH - Encoder Sin Cos+Hiperface
El controlador procesa las señales transmitidas por las tarjetas OPC, convirtiendo los impulsos en un recuento.
Este sistema de recuento tiene una precisión aproximada de 1 milímetro.

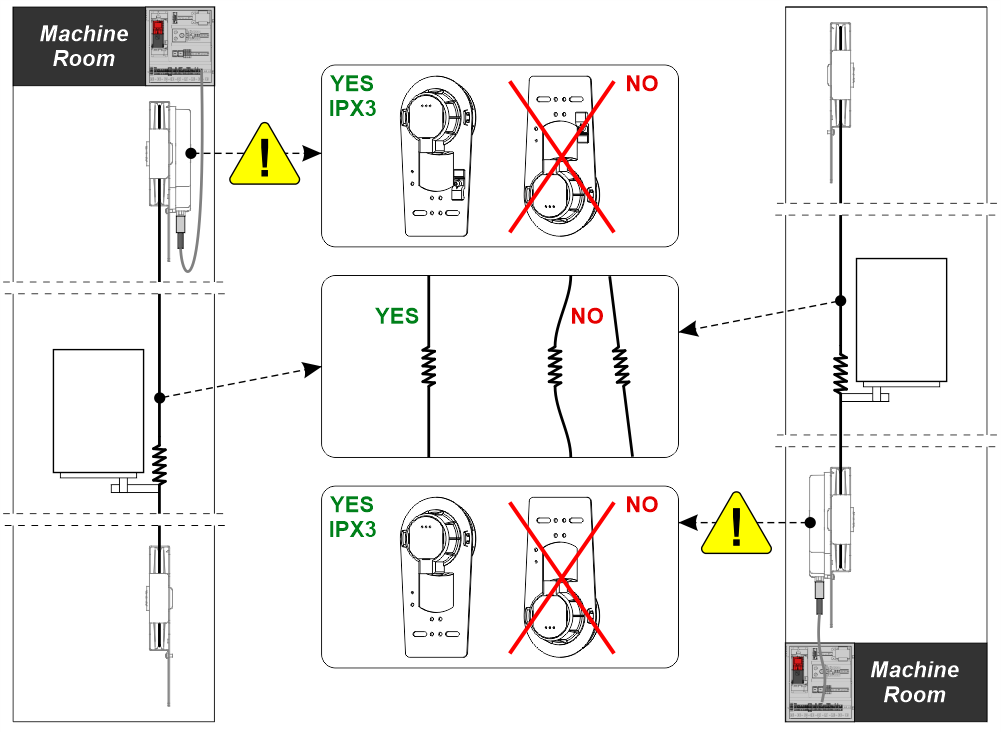
Codificador magnético de cable DMG
El nuevo codificador magnético DMG utiliza un sensor para detectar la rotación y la posición de un imán colocado en el eje de la polea del codificador. Los impulsos generados son recibidos y procesados por el panel de control del ascensor, que calcula la posición, la dirección y la velocidad de la cabina.
Instalación
Consejos y advertencias
La polea que aloja el encoder debe instalarse en la parte superior del eje o en el foso, cerca de la sala de máquinas.
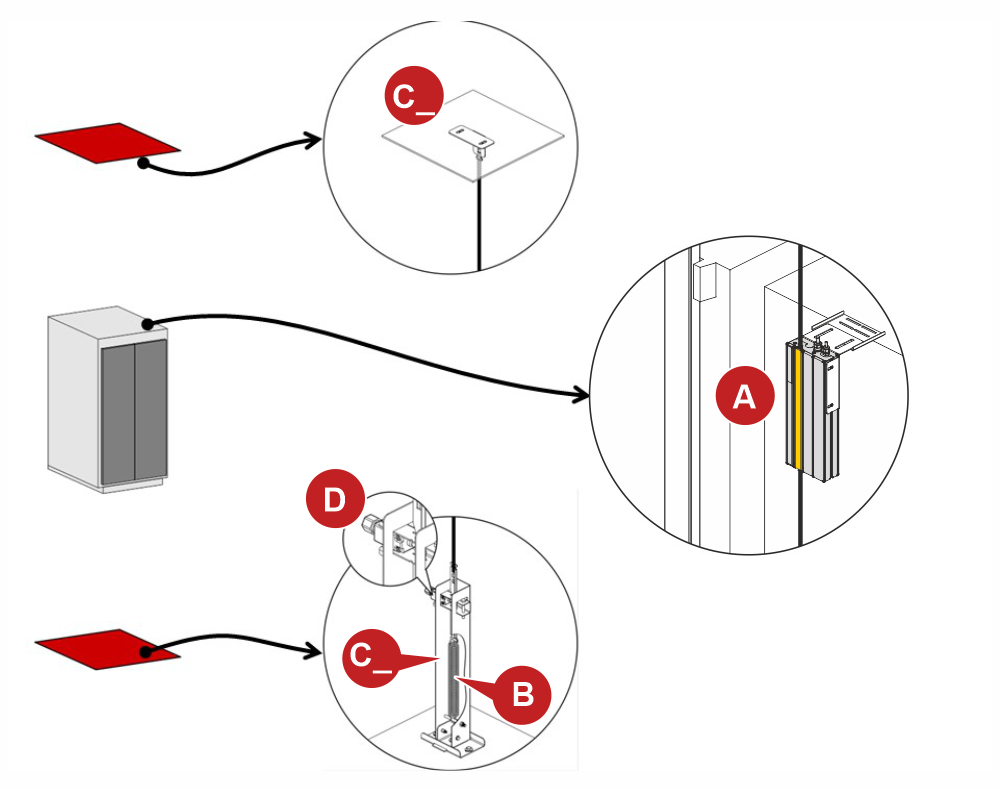
Componentes del sistema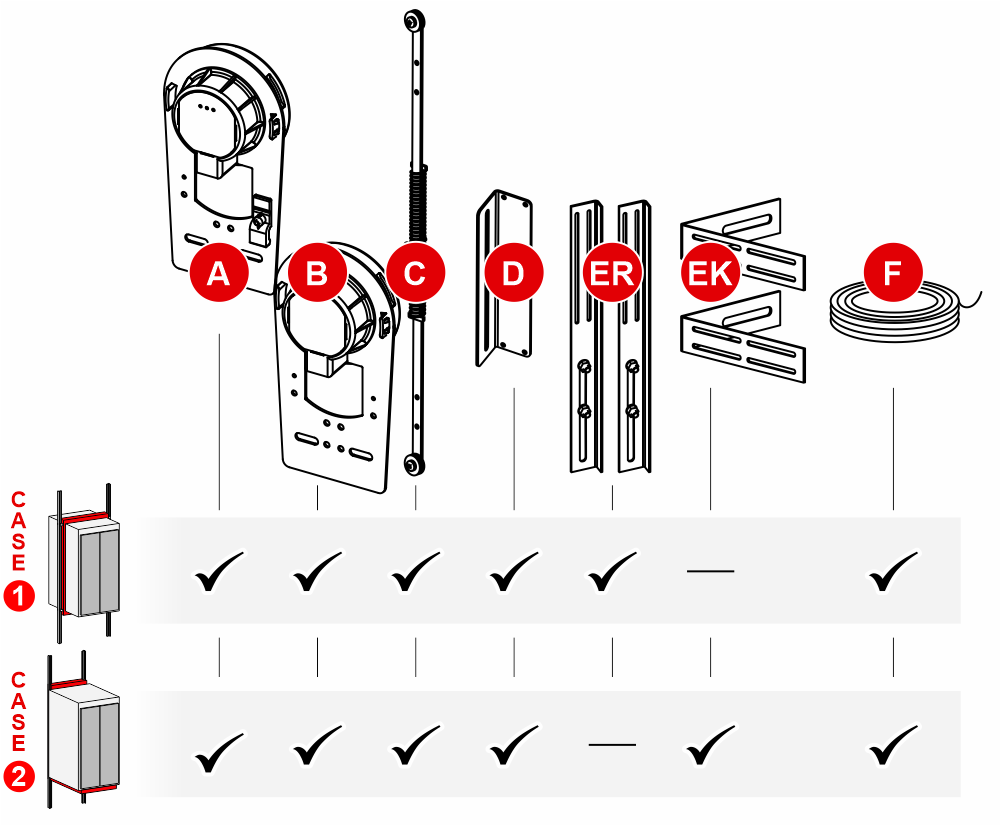
Caso 1 : Ascensores con mecánica de bastidor
Caso 2 : Ascensores con mecánica de mochila
A) - Es la polea del Encoder que contiene la tarjeta electrónica. Puede tener 2 resoluciones:
- 1,25 mm (100 PPR) para el encoder con etiqueta roja: Para utilizar con el controlador Pitagora 4.0 a partir de la versión de firmware 3.0.2
- 2,5 mm (50 PPR) para el codificador con etiqueta azul: Para utilizar con los controladores V3 / Musa / Pitagora 4.0 a partir de la versión de firmware Y
C) - El tensor de muelle también se puede montar en la parte superior de la cabina según sea necesario.
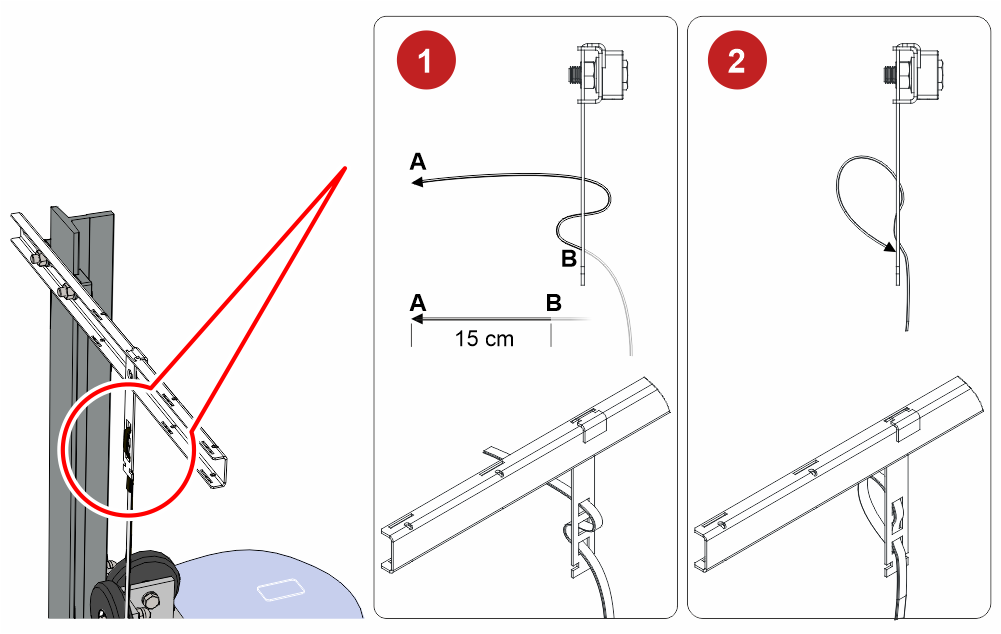
Montaje
El montaje depende de la mecánica de la instalación.
Caso 1 - Ascensores con mecánica de bastidores
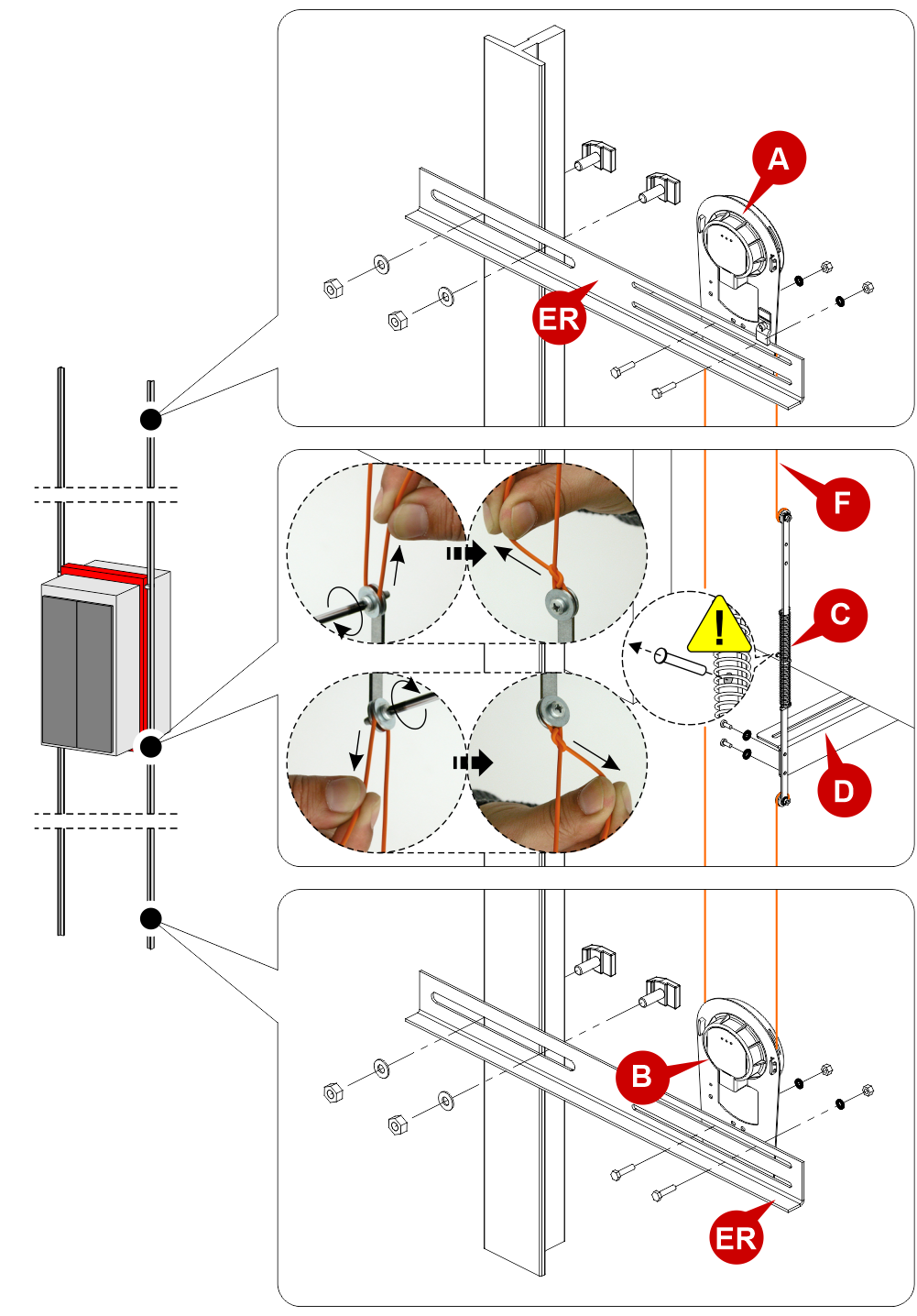
C) - El tensor de muelle también puede montarse en la parte superior de la cabina según sea necesario.
![]() Retire el retenedor sólo una vez finalizada la instalación.
Retire el retenedor sólo una vez finalizada la instalación.
En caso de sustitución en sistemas antiguos, será necesario desatar la cuerda antigua y volver a tensarla después de montar el nuevo codificador.
Caso 2 - Ascensores con mecánica de mochila
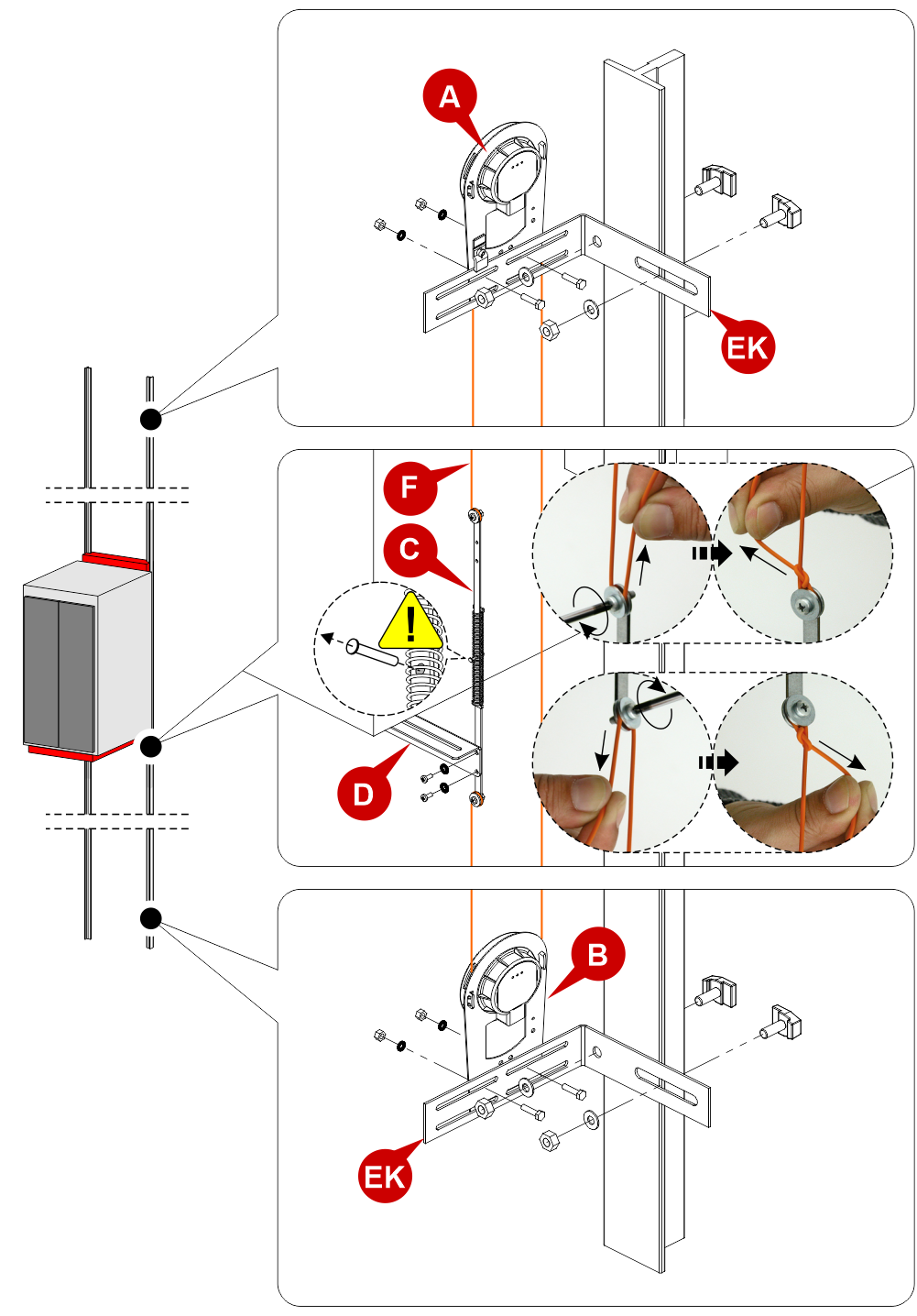
C) - El tensor de muelle también puede montarse en la parte superior de la cabina según sea necesario.
![]() Retire el retenedor sólo una vez finalizada la instalación.
Retire el retenedor sólo una vez finalizada la instalación.
En caso de sustitución en sistemas antiguos, será necesario desatar la cuerda antigua y volver a tensarla después de montar el nuevo codificador.
Cableados
Conexión al controlador Pitagora 4.0
- A partir de la versión de firmware 3.0.2 -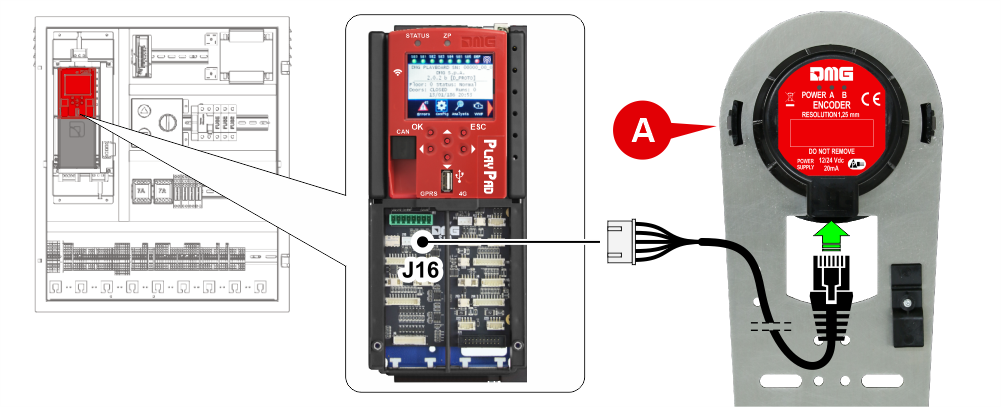 A) - Codificador con resolución de 1,25 mm
A) - Codificador con resolución de 1,25 mm
- Hasta la versión de firmware 3.0.1 -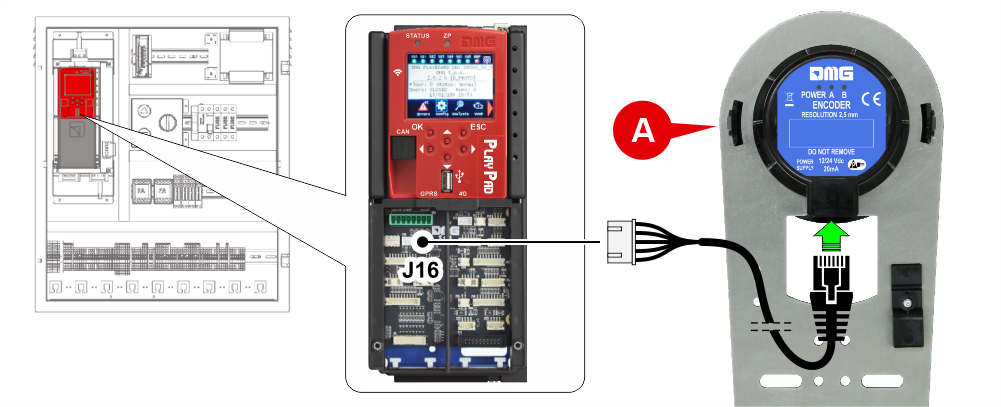 A) - Codificador con resolución de 2,50 mm
A) - Codificador con resolución de 2,50 mm
Conexión a controladores MUSA / PLAYBOARD V3 existentes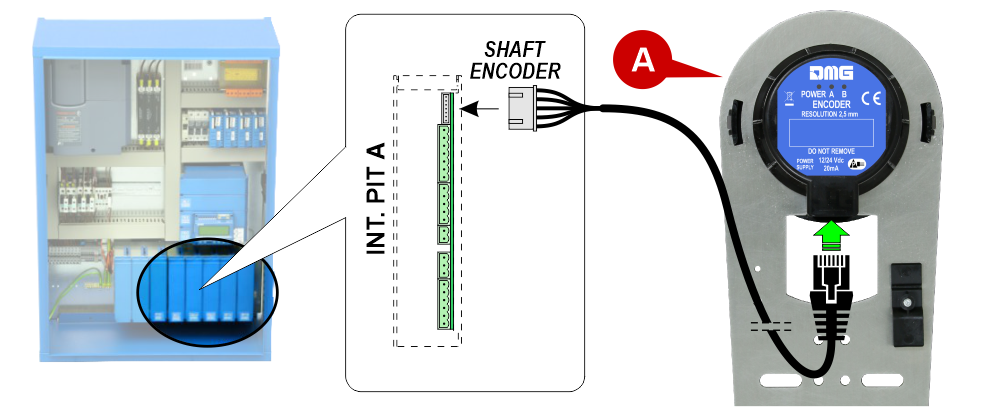
A) - Codificador con resolución de 2,50 mm
Puede sustituir el encóder de cable existente por el nuevo encóder magnético (resolución de 2,50 mm).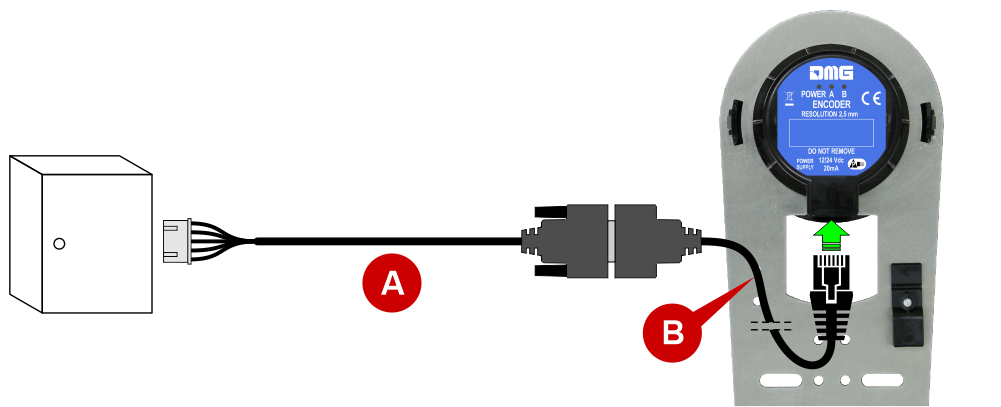
Basta con dejar el cable existente (A) y conectarlo al nuevo codificador mediante un cable adaptador (B).
Después de sustituir el codificador, compruebe:
- El sentido de giro correcto en el modo de inspección (movimiento hacia arriba, aumento en mm, movimiento hacia abajo, disminución en mm). Si es necesario, cambie el sentido de giro desde el controlador siguiendo estas instrucciones:
- Configure el panel en Operaciones temporales (menú Configuración -> Operaciones temporales -> Sí);
- Cambia la rotación en el menú Posicionamiento del Sistema -> Sistema de Posicionamiento -> encoder horario/antihorario;
- Elimine las Operaciones temporales (menú Configuración -> Operaciones temporales -> No).
- Compruebe la correcta alineación de la cabina en todos los pisos. Si es necesario, ajuste la precisión de parada desde el controlador en el menú Posicionamiento del sistema -> Posición del piso.
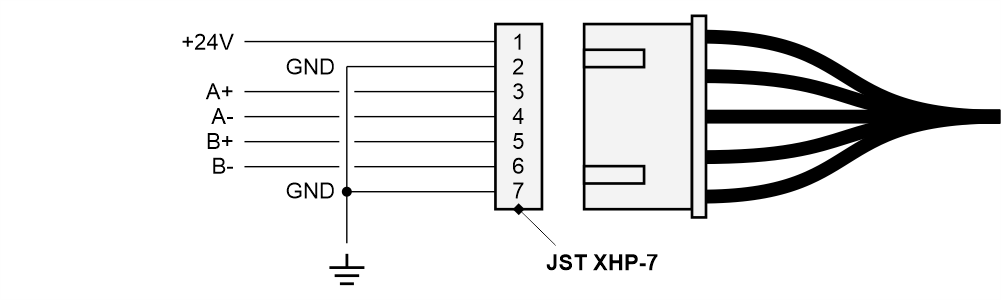
PIN OUT Conector JST 7 polos
LED de diagnóstico

POWER: Si el LED está encendido, el codificador está alimentado.
A/B: Estado de las salidas del codificador. Con la cabina del ascensor parada no hay cambios en el estado de estos LEDs (pueden estar tanto encendidos como apagados); con la cabina del ascensor en movimiento los LEDs estarán ambos encendidos.
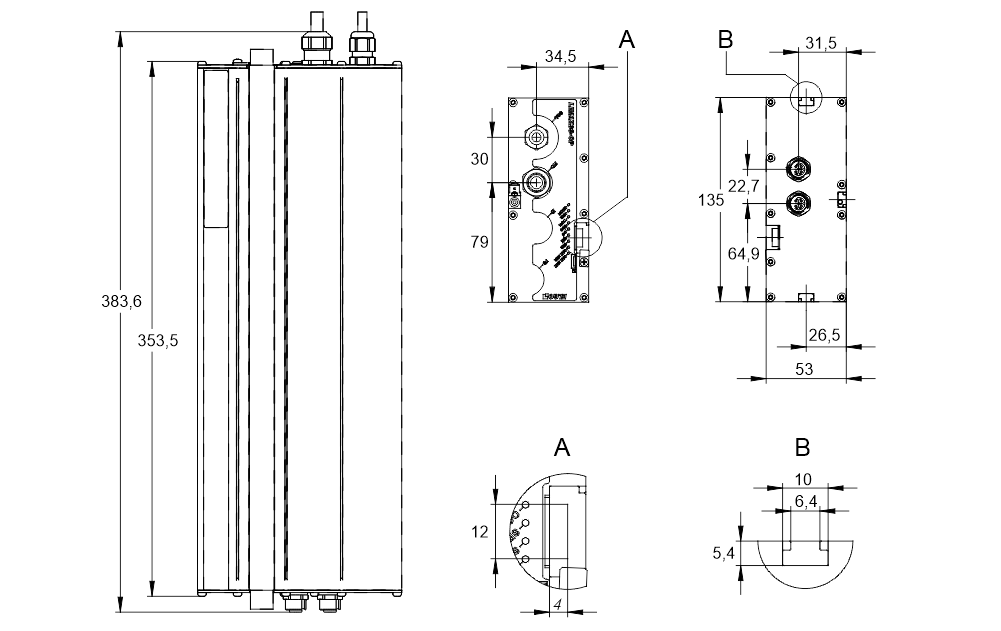
Codificador absoluto (ELGO LIMAX 33 CP)
El codificador absoluto permite sustituir todos los contactos de seguridad del interior del hueco del ascensor. La posición de la cabina se detecta gracias a una banda magnética.
Instalación
Dimensiones:
Componentes del sistema
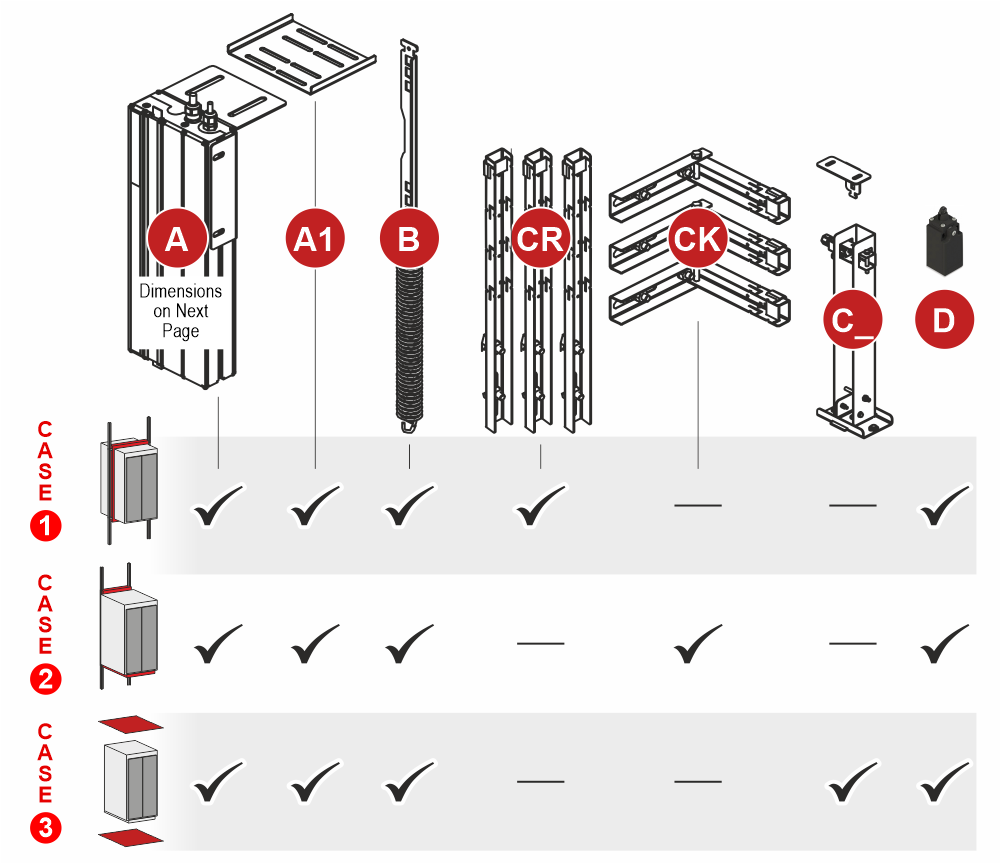
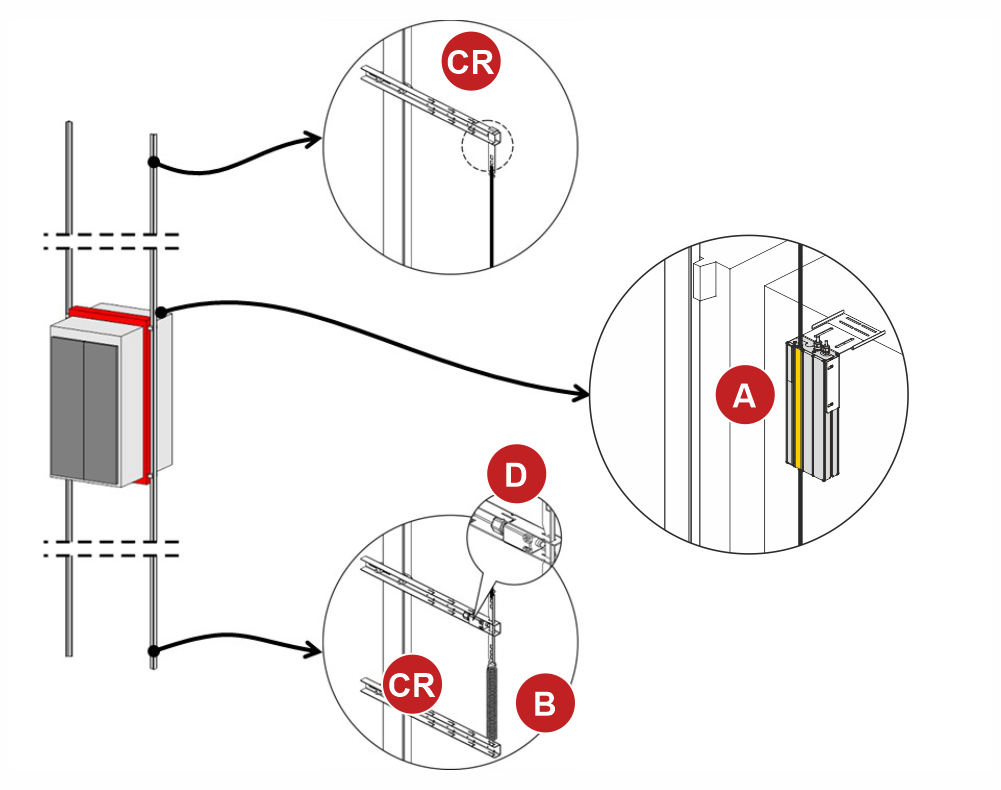
Caso 1 : Ascensores con mecánica de bastidor
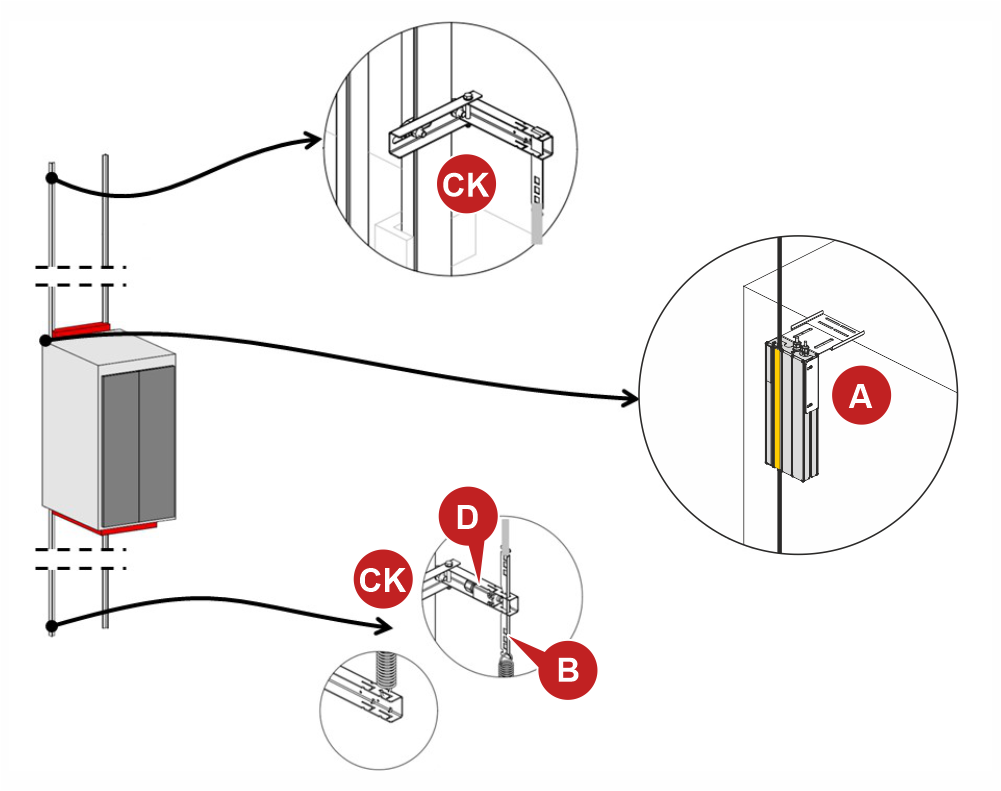
Caso 2 : Ascensores con mecánica de mochila
Caso 3 : Fijación al suelo y al techo
Montaje
Caso 1 - Ascensores con mecánica de bastidores
Caso 2 - Ascensores con mecánica de mochila
Caso 3 - Fijación al suelo y al techo

Tenga cuidado de colocar la banda magnética como se muestra en las figuras siguientes.
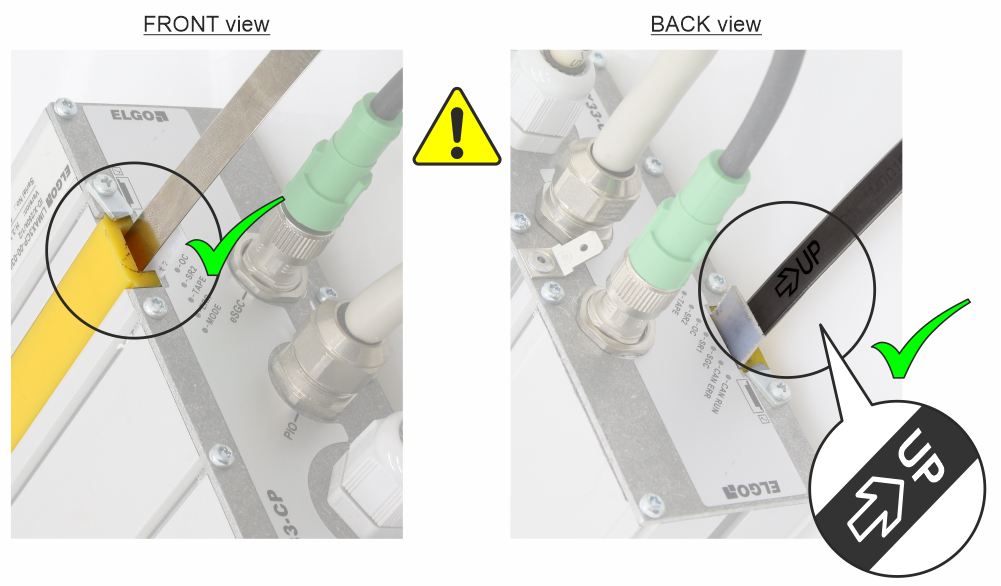
Colocación correcta de la cinta magnética![]() Retire todos los imanes del compartimento antes de instalar la cinta magnética.
Retire todos los imanes del compartimento antes de instalar la cinta magnética.
No instale la cinta magnética cerca de motores de imanes permanentes.
No utilice herramientas magnetizadas cerca de la cinta magnética.
No utilice equipos de soldadura cerca de la cinta magnética.
Respete el accesorio indicado en la cinta y asegúrese de que está en la posición correcta que se muestra en la siguiente figura:
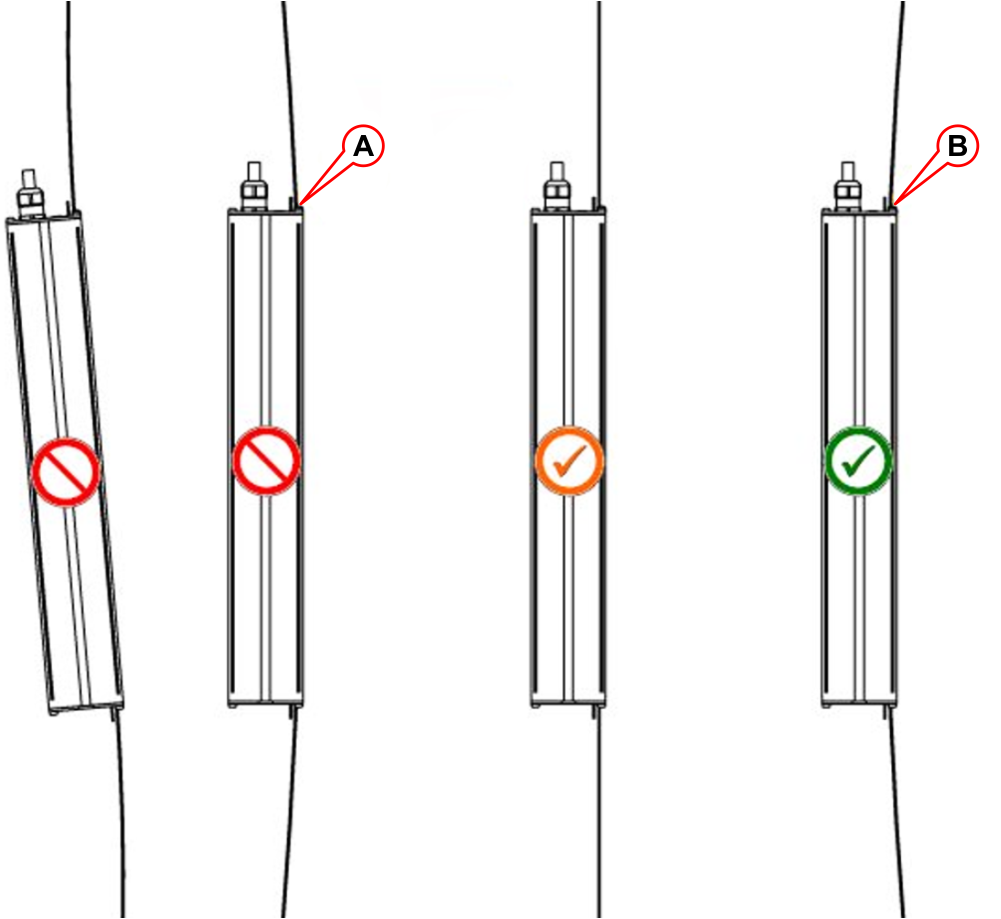
A) - La cinta toca la guía con el lado magnetizado.
B) - La cinta toca la guía con el lado de acero.
LED Señal en el aparato

| LED | DESCRIPCIÓN | |
|---|---|---|
| MODO | Modo normal | Parpadeo lento (1 s) |
| Modo de preinstalación | Parpadeo rápido (0,1 s) | |
| Modo Enseñar | Luces permanentes | |
| ERROR | Ningún error | Led OFF |
| Error genérico | Led ON | |
| Error de emergencia | Intermitente | |
| CINTA | Cinta magnética no detectada | Led ON |
| eSGC | eSGC Cerrar contacto | Led ON |
| Contacto eSGC Abierto | Led OFF | |
| OC | OC Contacto cercano | Led ON |
| OC Contacto Abierto | Led OFF | |
| SR1 | SR1 Cerrar contacto | Led ON |
| SR1 Contacto abierto | Led OFF | |
| SR2 | SR2 Cerrar contacto | Led ON |
| SR2 Contacto abierto | Led OFF | |
| CAN-ERR | Estado CAN Abierto | Led ON |
| CAN-RUN | Estado Puede abrir | Led OFF |
Explicación de los contactos de seguridad
| Instalación de cabezal reducido y/o PIT reducido | Suficiente espacio libre de cabeza y foso según EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
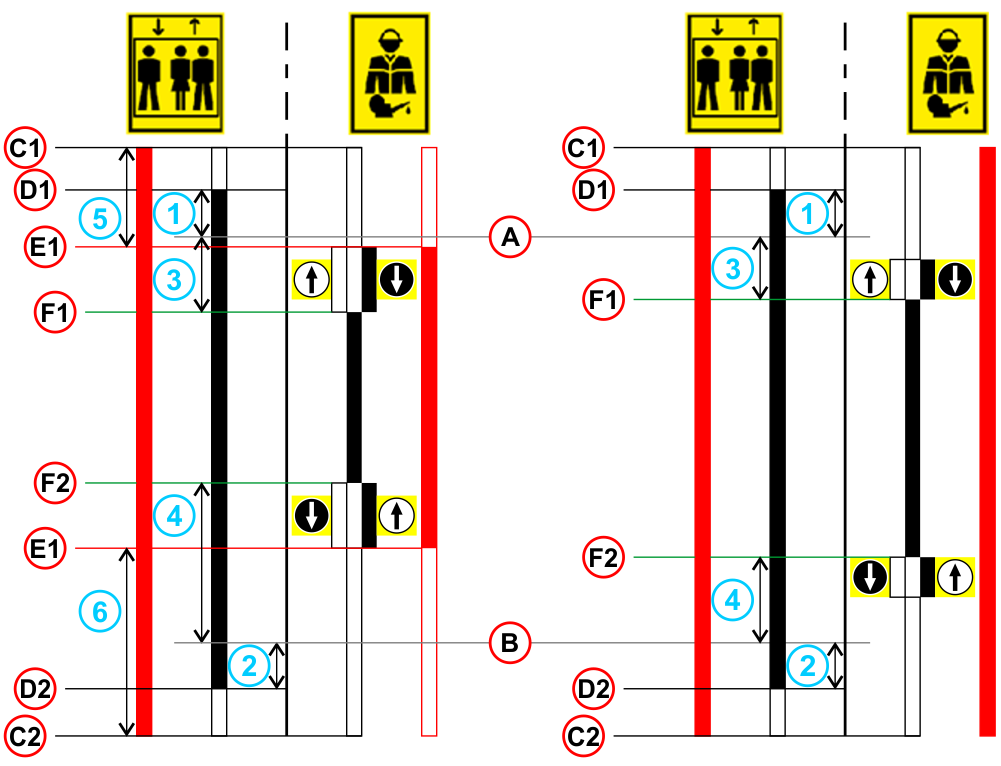 |
|||
 | Modo normal | A) - | Piso TOP |
 | Modo de inspección | B) - | piso de abajo |
 | Estado de los contactos de seguridad | C1) - | Posición de referencia superior |
| Botón de inspección ARRIBA | C2) - | Posición de referencia inferior | |
| Inspección Botón ABAJO | D1) - | Final de carrera superior | |
| Finales de carrera Desplazamiento hacia arriba | D2) - | Final de carrera inferior | |
| Finales de carrera Desplazamiento hacia abajo | E1) - | Límite superior del sistema de parada por disparo previo | |
| Finales de carrera de inspección Desplazamiento hacia arriba | E2) - | Límite inferior del sistema de parada con disparo previo | |
| Finales de carrera de inspección Desplazamiento hacia abajo | F1) - | Final de carrera de inspección superior | |
| Sistema de parada con disparo previo Desplazamiento hacia arriba | F2) - | Final de carrera de inspección inferior | |
| Desplazamiento hacia abajo del sistema de parada con disparo previo | |||
Para el ajuste manual de las posiciones de los indicados es posible desde el menú <Positioning> Monitor Encoder (véase el cuadro siguiente).
| Etiqueta | Página | Descripción | |
|---|---|---|---|
| N_LIM_S | 7 | Desplazamiento del final de carrera superior (desplazamiento sobre el piso superior) | |
| N_LIM_D | 7 | Desplazamiento del final de carrera inferior (desplazamiento bajo el piso inferior) | |
| I_LIM_S | 6 | Interruptor límite de inspección superior (desplazado bajo el piso superior) | |
| I_LIM_D | 6 | Final de carrera de inspección inferior (desplazado sobre el piso inferior) | |
| VIAJES | 8 | Límite superior del sistema de paro previo (desde la posición de referencia superior) | |
| TRIPD | 8 | Límite inferior del sistema de pre-disparo (desde la posición de referencia inferior) |
Los valores TRIPS y TRIPD sólo se utilizan si ELGO forma parte del Sistema de Seguridad para Cabeza y/o Foso Reducidos (ELGO + eSGC).
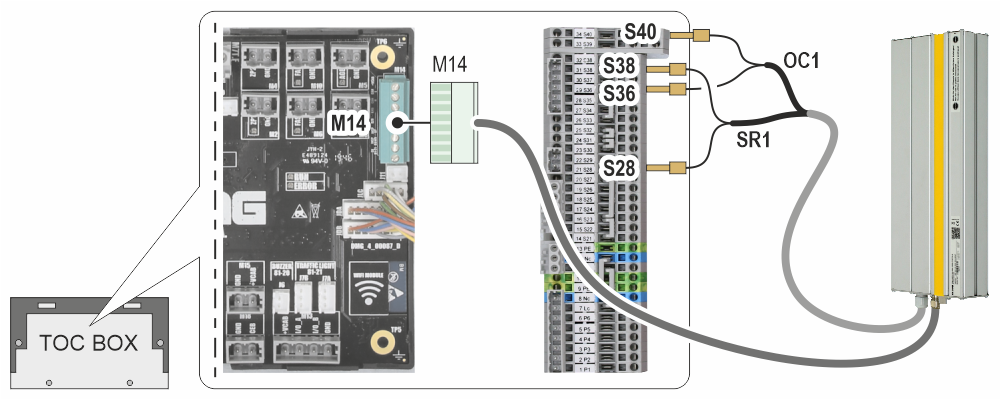
Cableados
Conexión al controlador Pitagora 4.0
El codificador ELGO se conecta directamente a la caja TOC (parte superior de la cabina)
Tutorial en vídeo
Lengua inglesa
Lengua italiana