
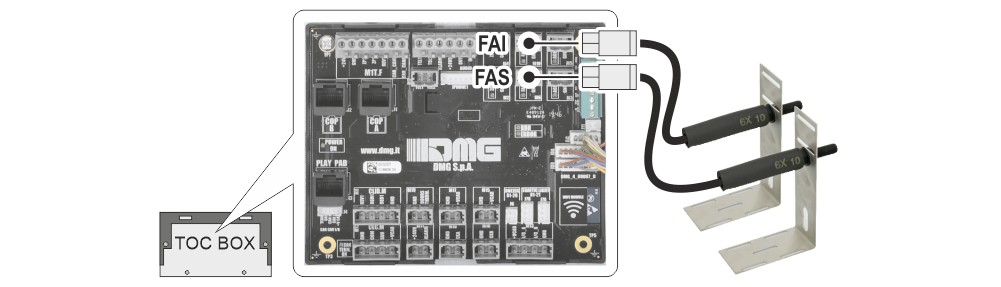
Magnetiske læsere (FAI / FAS)
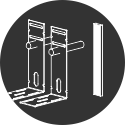
Dette tællesystem består af to magnetiske læsere (FAI-FAS) med en normalt åben kontakt monteret på to beslag placeret på toppen af kabinen og et sæt magneter placeret på elevatorens skinner.
Dette tællesystem kan bruges, når systemets egenskaber opfylder følgende betingelser:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Installation

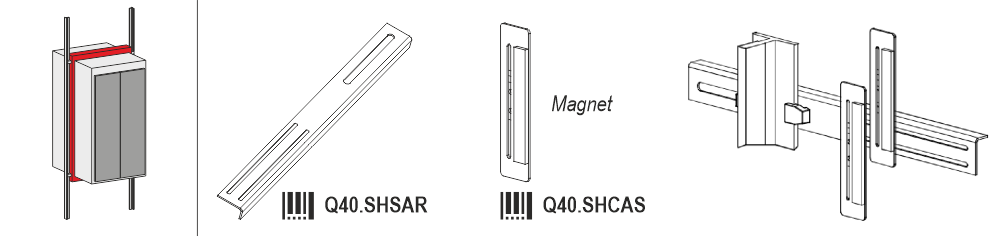
Tilfælde A: Elevatorer med rammemekanik
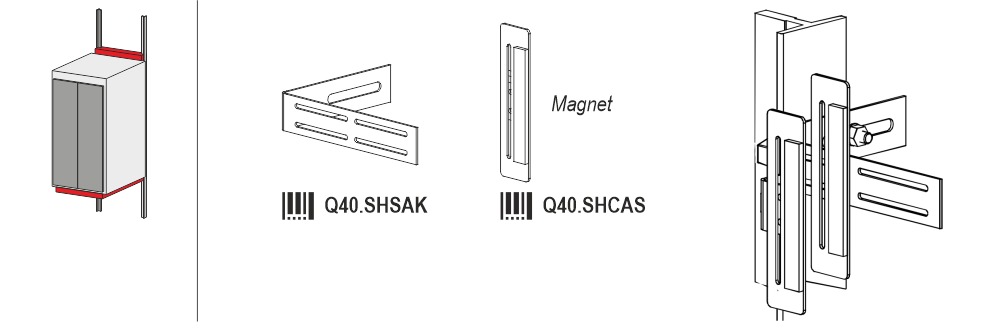
Tilfælde B: Elevatorer med rygsæksmekanik
Tilbehør til særlige tilfælde
Placering af magneter på elevatorstyringer
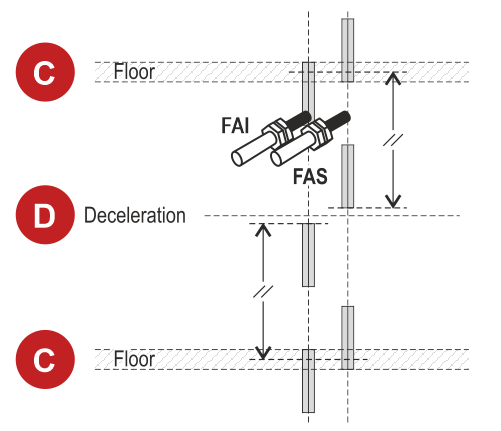
C) Gulve
D) Deceleration
Ledninger
De magnetiske læsere er tilsluttet direkte til TOC-boksen (øverst i kabinen).
Motorencoder
Dette tællesystem kan kun bruges på systemer med hastigheder under 2 m/s og uden åbne dørmanøvrer. Det er kun egnet til følgende valgfrie kort til gearløse motorer med lukkede systemer:
OPC-PR Q40.SCLSC – Encoder Sin Cos
OPC-PS Q40.SCLFL – Encoder En Dat
OPC-PSH Q40.SCLSCH – Encoder Sin Cos+Hiperface
Controlleren behandler signalerne, der sendes af OPC-kortene, og omdanner impulserne til en tælling.
Dette tællingssystem har en nøjagtighed på ca. 1 millimeter.

DMG reb magnetisk enkoder
Den nye DMG magnetiske encoder bruger en sensor til at registrere rotation og position af en magnet, der er placeret på encoderens remskiveaksel. De genererede impulser modtages og behandles af elevatorens kontrolpanel, som beregner kabinens position, retning og hastighed.
Installation
Råd og advarsler
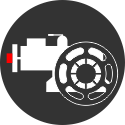
Remskiven, hvor encoderen er indbygget, skal installeres øverst på akslen eller i pitten tæt på maskinrummet.
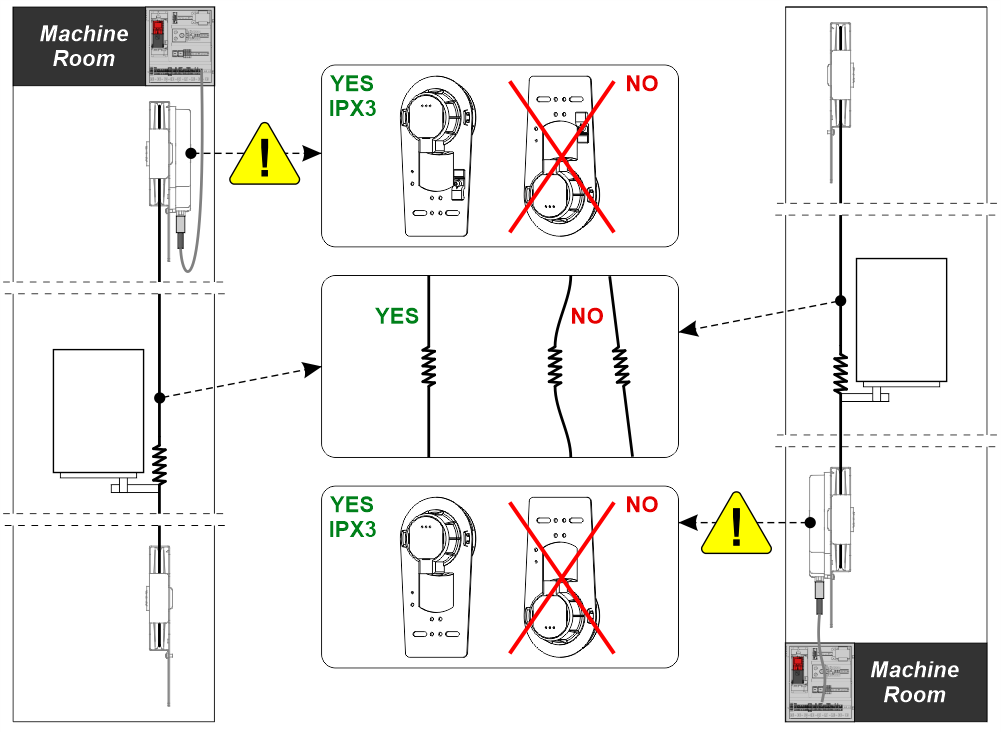
Systemkomponenter
Tilfælde 1: Elevatorer med rammemekanik
Tilfælde 2: Elevatorer med rygsæksmekanik
A) – Det er enkoderhjulet, der indeholder det elektroniske kort. Den kan have 2 opløsninger:
– 1,25 mm (100 PPR) for den røde mærkede encoder: Skal bruges med Pitagora 4.0-controlleren fra firmwareversion 3.0.2
– 2,5 mm (50 PPR) til den blå mærkede encoder: Skal bruges med V3 / Musa / Pitagora 4.0-controllere op til firmwareversion Y
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
Montering
Montering afhænger af installationens mekanik.
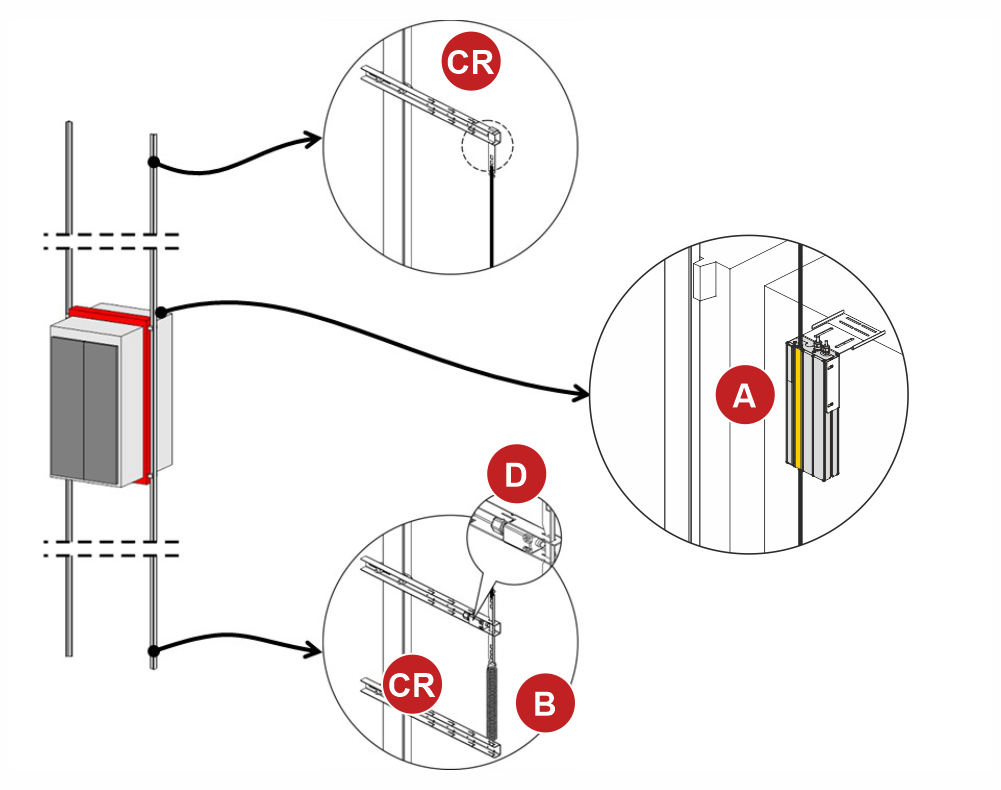
Tilfælde 1 – Elevatorer med rammemekanik
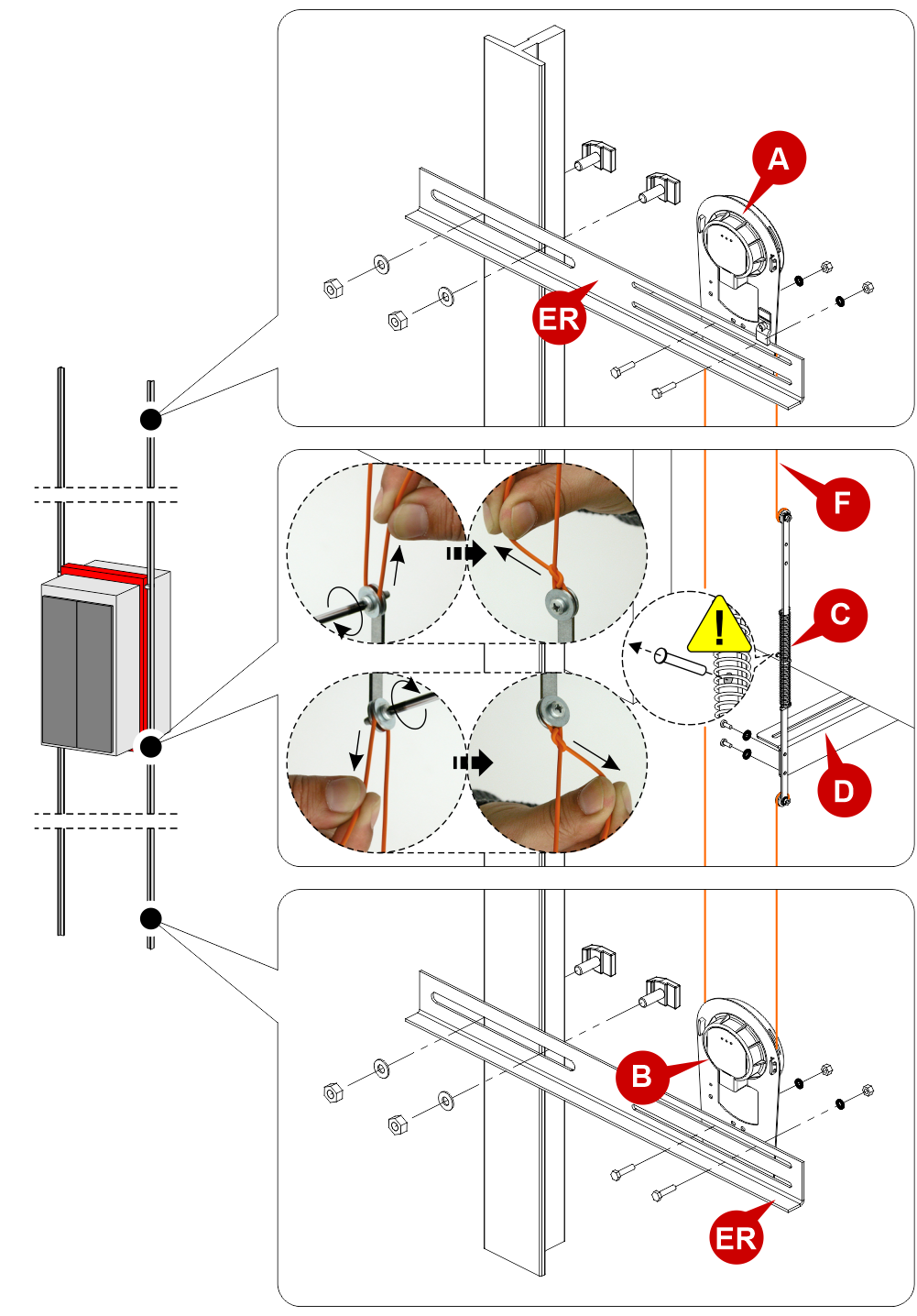
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
![]() Fjern kun holderen, når installationen er afsluttet.
Fjern kun holderen, når installationen er afsluttet.
Ved udskiftning på gamle systemer er det nødvendigt at løsne det gamle reb og spænde det igen efter montering af den nye encoder.
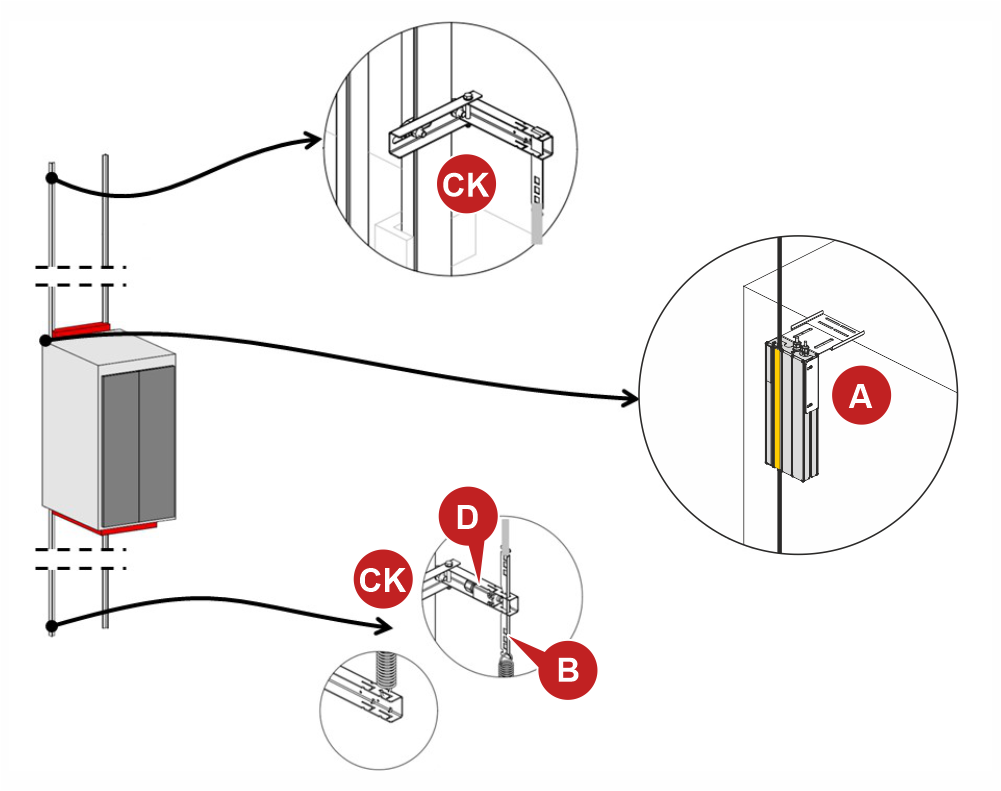
Tilfælde 2 – Elevatorer med rygsæksmekanik
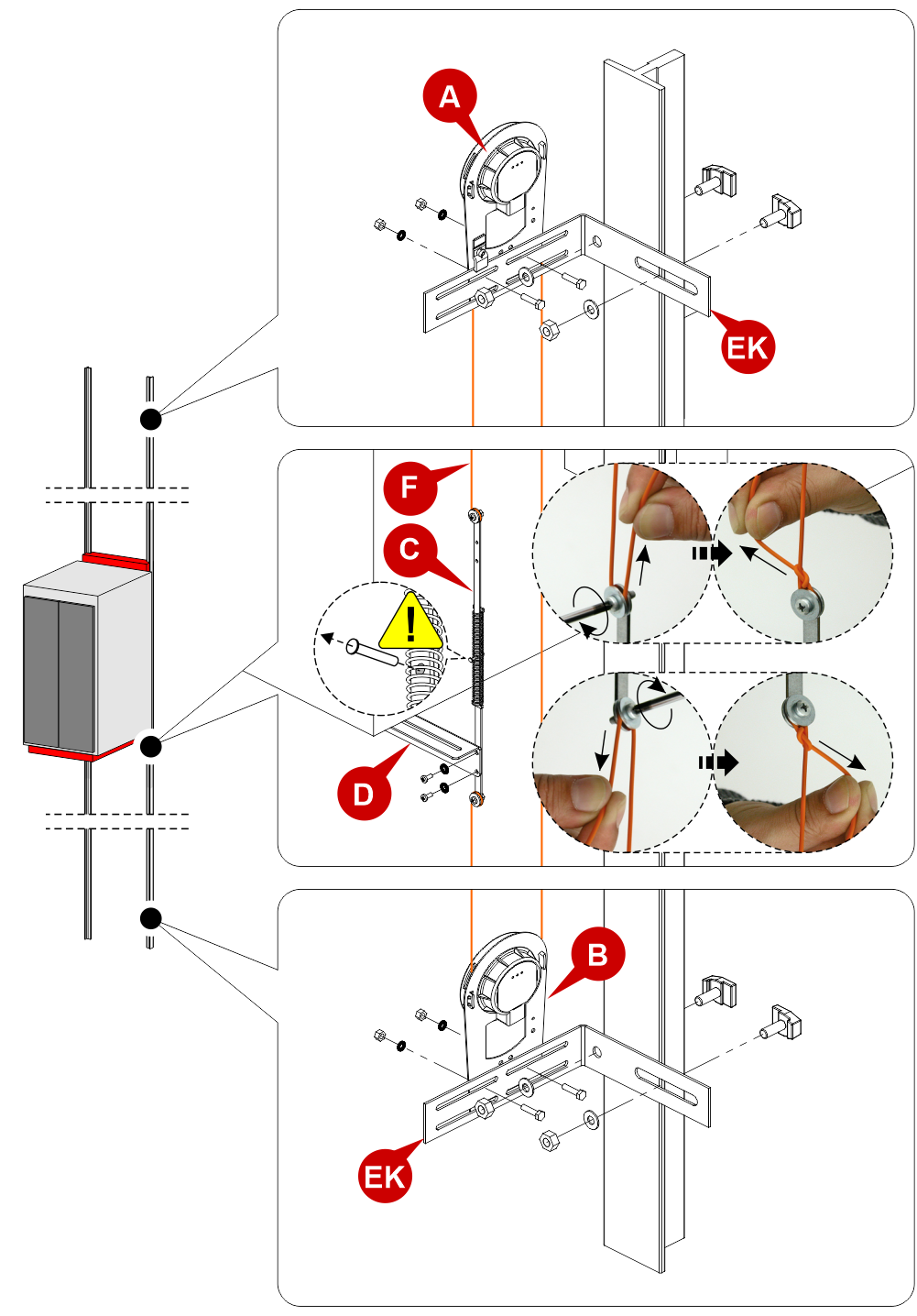
C) – Fjederspænderen kan også monteres på toppen af kabinen efter behov.
![]() Fjern kun holderen, når installationen er afsluttet.
Fjern kun holderen, når installationen er afsluttet.
Ved udskiftning på gamle systemer er det nødvendigt at løsne det gamle reb og spænde det igen efter montering af den nye encoder.
Ledninger
Tilslutning til Pitagora 4.0-controller
– Fra firmwareversion 3.0.2 –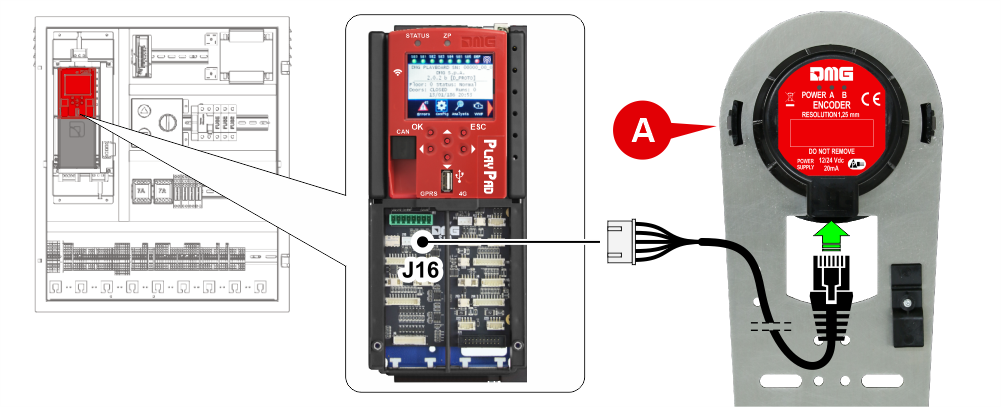 A) – Encoder med 1,25 mm opløsning
A) – Encoder med 1,25 mm opløsning
– Op til firmwareversion 3.0.1 –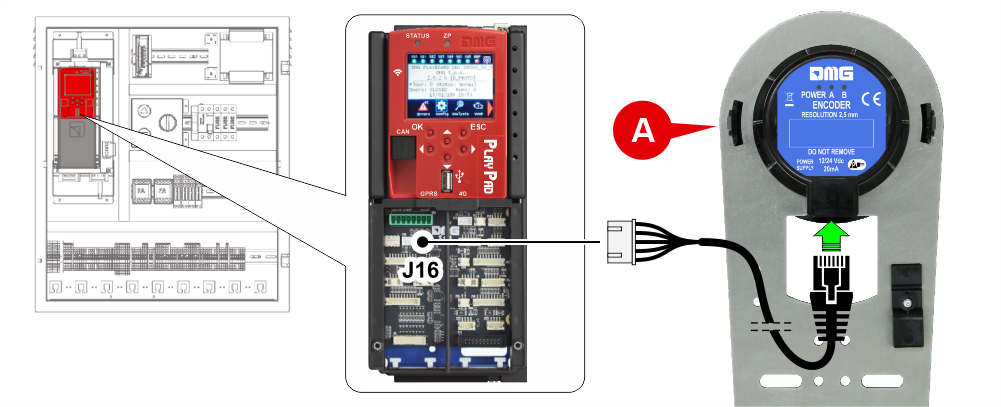 A) – Encoder med 2,50 mm opløsning
A) – Encoder med 2,50 mm opløsning
Tilslutning til eksisterende MUSA / PLAYBOARD V3-controllere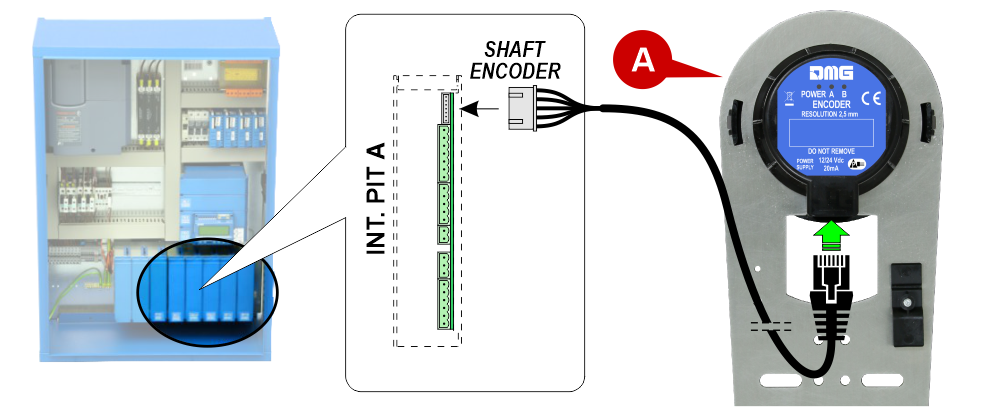
A) – Encoder med 2,50 mm opløsning
Du kan udskifte den eksisterende reb-enkoder med den nye magnetiske enkoder (2,50 mm opløsning).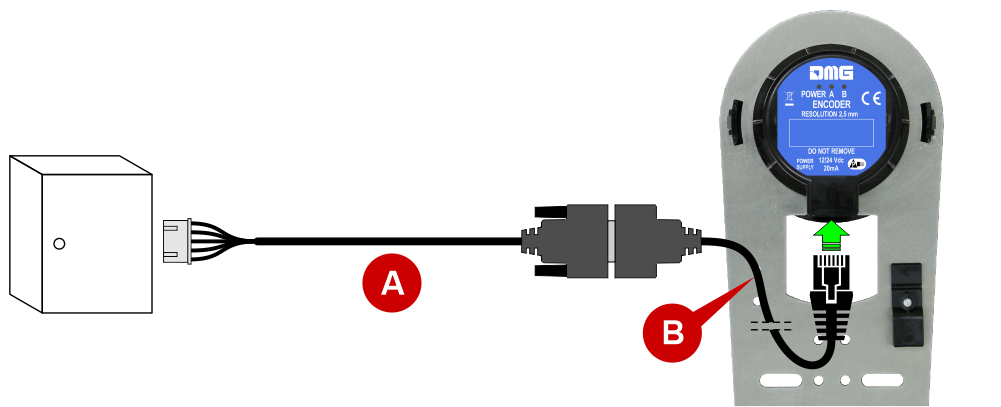
Bare lad det eksisterende kabel (A) sidde og tilslut det til den nye encoder ved hjælp af et adapterkabel (B).
Efter udskiftning af encoderen skal du kontrollere:
- Den korrekte rotationsretning i inspektionsmodus (opadgående bevægelse, stigning i mm, nedadgående bevægelse, fald i mm). Om nødvendigt kan du ændre rotationsretningen fra controlleren ved at følge disse instruktioner:
- Indstil panelet til Midlertidige operationer (Konfigurationsmenu -> Midlertidige operationer -> Ja);
- Ændr rotationen i menuen System Positioning (Systempositionering) -> Positioning System (Positioneringssystem) -> encoder med uret/mod uret;
- Fjern de midlertidige handlinger (Konfigurationsmenu -> Midlertidige handlinger -> Nej).
- Kontroller, at bilen er korrekt justeret på alle etager. Juster om nødvendigt stopnøjagtigheden fra controlleren i menuen System Positioning -> Gulvposition.
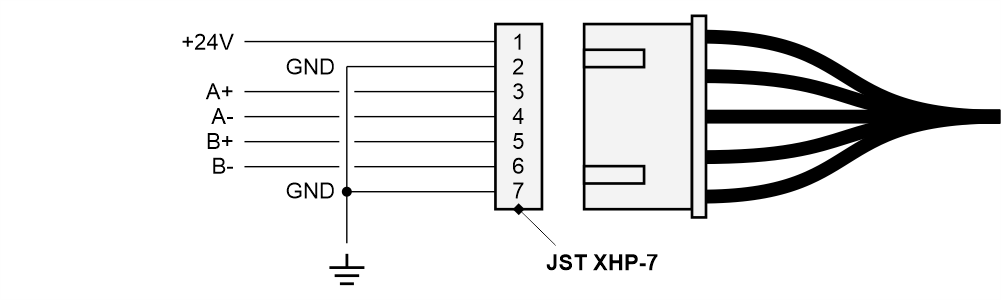
PIN OUT JST 7-polet stik
Diagnostik-LED

STRØM: Hvis LED'en lyser, er encoderen tilsluttet strøm.
A/B: Status for encoderudgange. Når elevatorstolen står stille, ændres status for disse LED'er ikke (de kan både være tændt og slukket); når elevatorstolen er i bevægelse, vil begge LED'er være tændt.
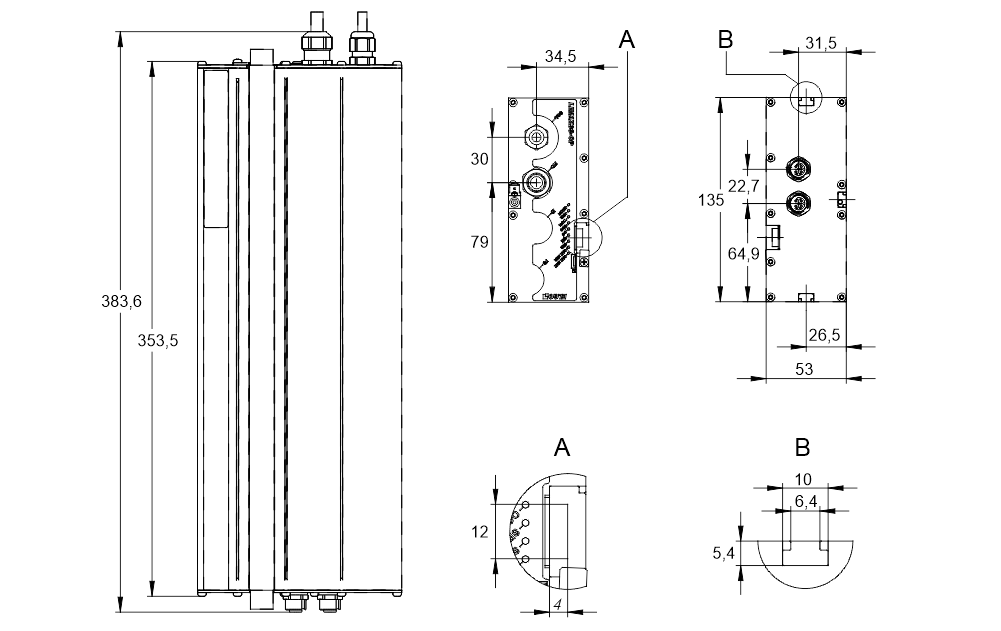
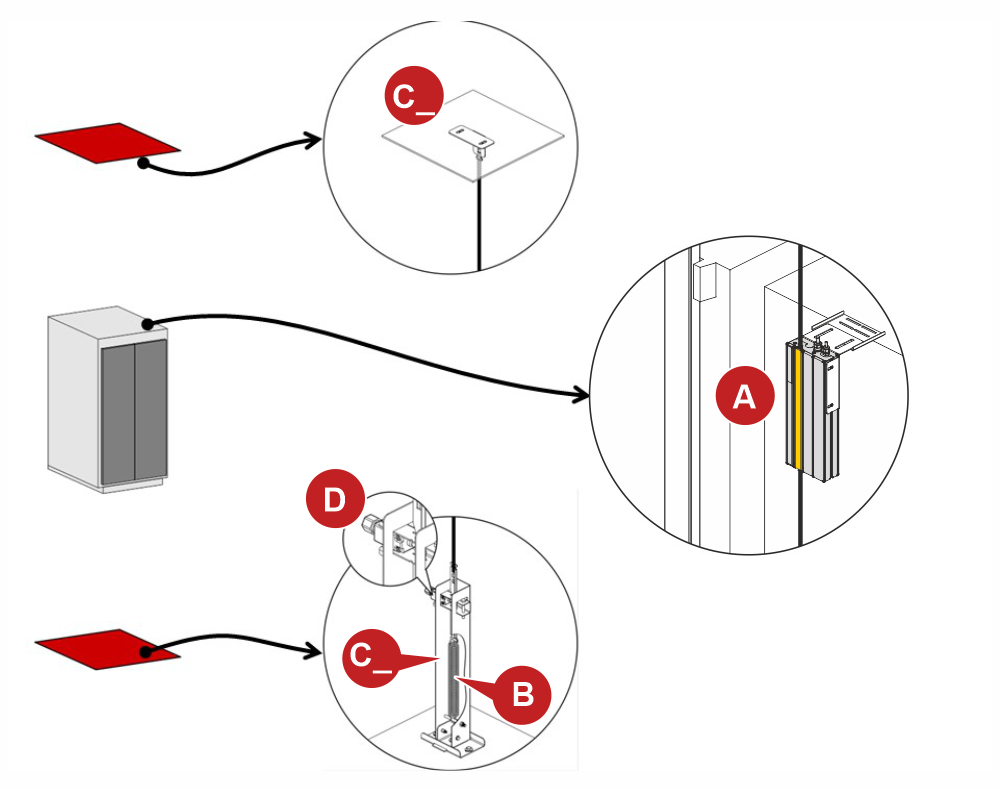
Absolut encoder (ELGO LIMAX 33 CP)
Den absolutte enkoder gør det muligt at udskifte alle sikkerhedskontakterne inde i elevatorskakten. Kabinens position registreres ved hjælp af en magnetisk strimmel.
Installation
Dimensioner:
Systemkomponenter
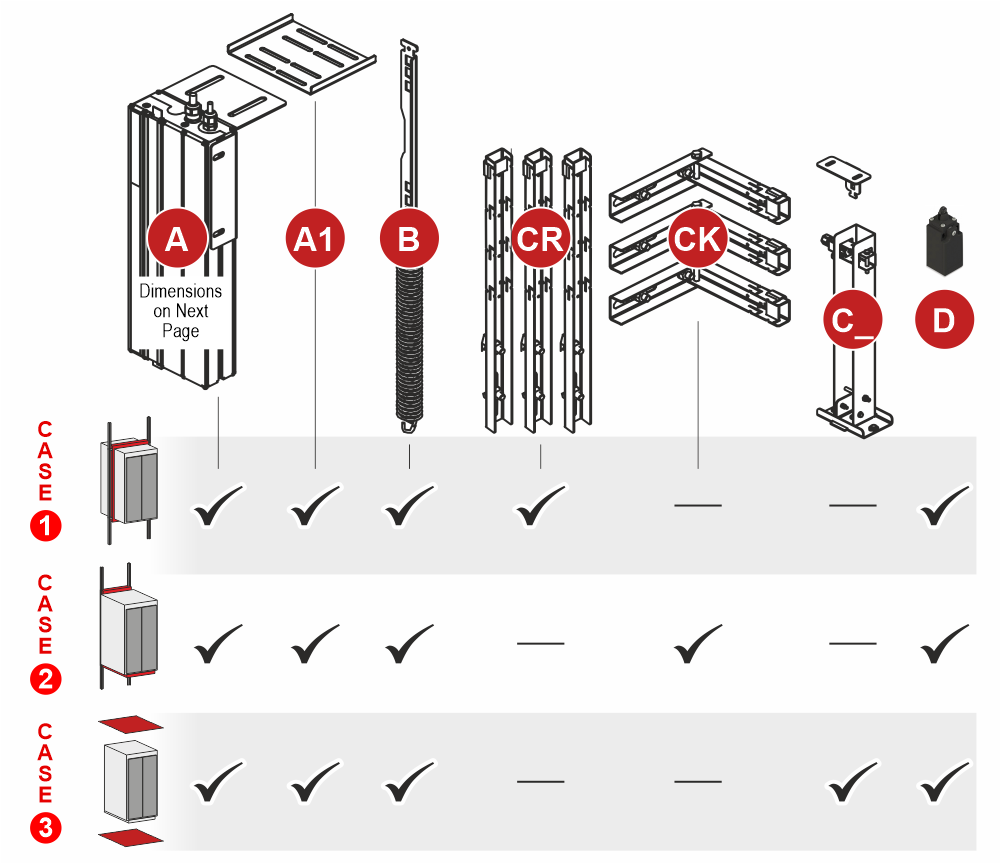
Tilfælde 1: Elevatorer med rammemekanik
Tilfælde 2: Elevatorer med rygsæksmekanik
Tilfælde 3: Fastgørelse til gulv og loft
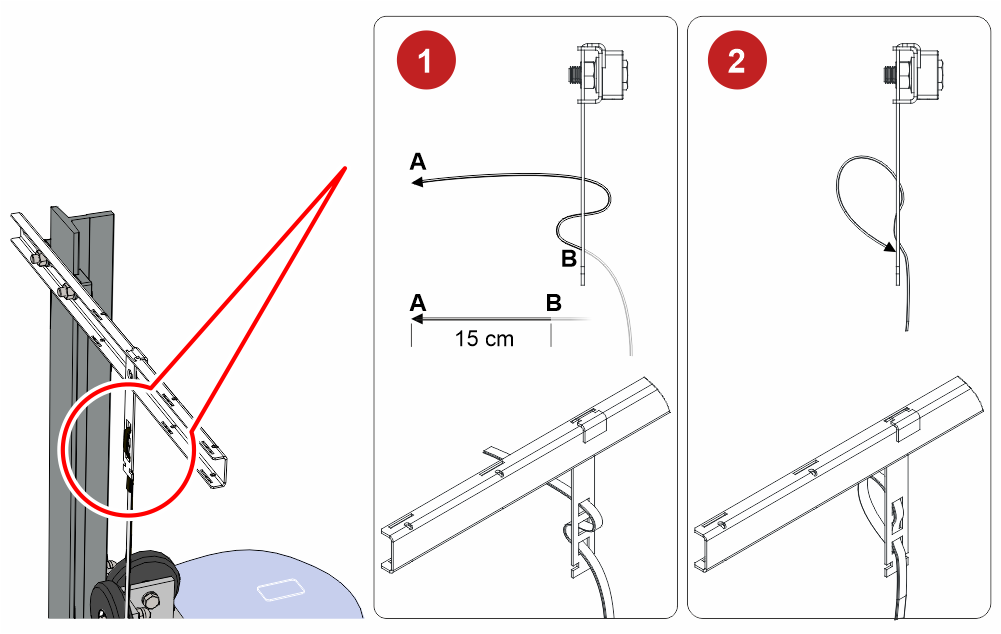
Montering
Tilfælde 1 – Elevatorer med rammemekanik
Tilfælde 2 – Elevatorer med rygsæksmekanik
Eksempel 3 – Fastgørelse til gulv og loft

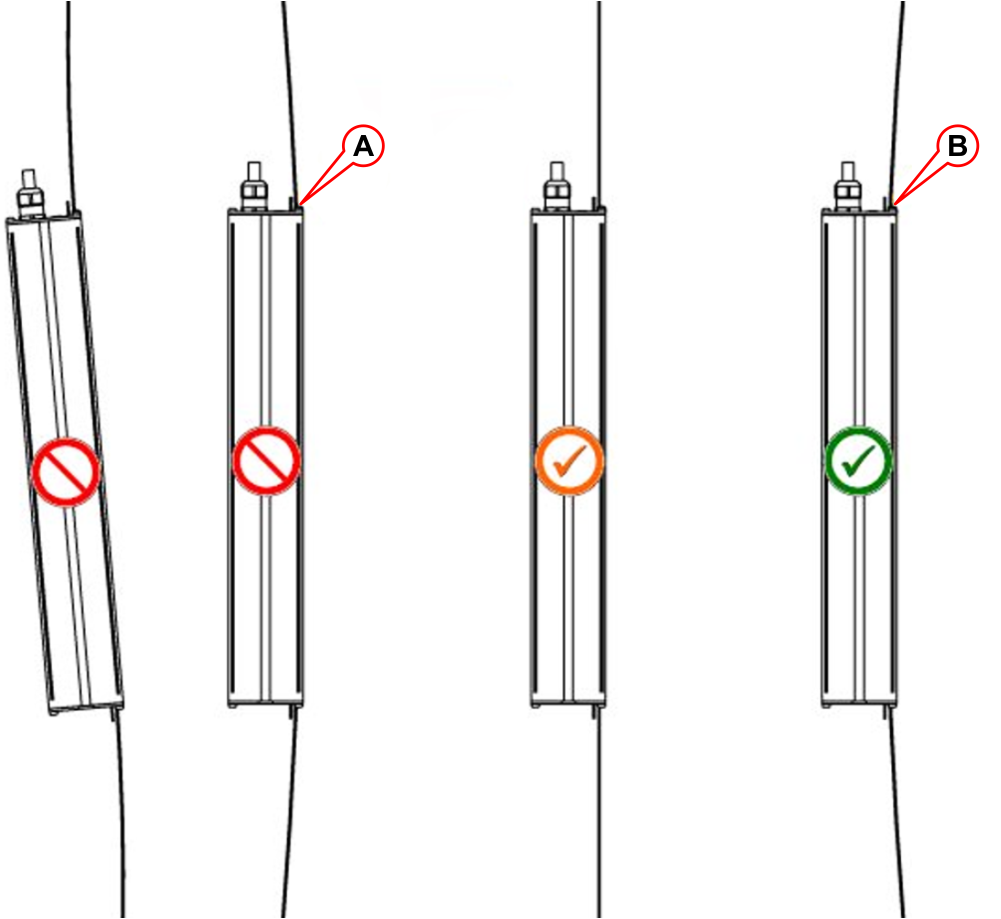
Vær omhyggelig med at placere magnetstriben som vist på nedenstående figurer.
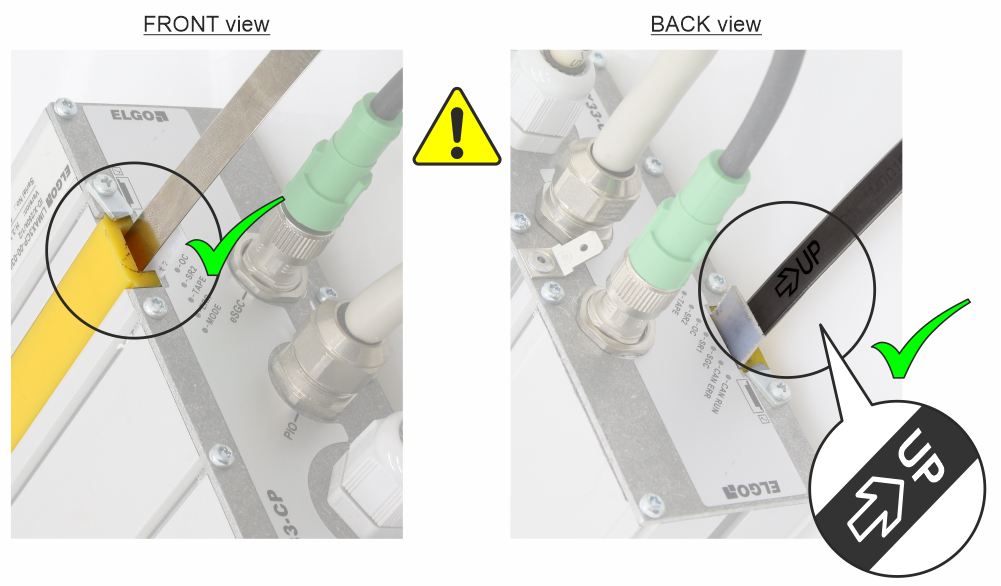
Korrekt placering af magnetbåndet![]() Fjern alle magneter i rummet, før du monterer magnetbåndet.
Fjern alle magneter i rummet, før du monterer magnetbåndet.
Respekter monteringen vist på båndet og sørg for, at det er i den korrekte position vist i følgende figur:
A) – Tapen berører guiden med den magnetiserede side.
B) – Tapen berører guiden med ståliden.
LED-signal på enheden

| LED | BESKRIVELSE | |
|---|---|---|
| MODE | Normal tilstand | Langsomt blink (1 s) |
| Før idriftsættelse-tilstand | Hurtigt blink (0,1 s) | |
| Undervisningsfunktion | Lys permanent | |
| FEJL | Ingen fejl | LED slukket |
| Generisk fejl | LED tændt | |
| Nødfejl | Blinkende | |
| TAPE | Magnetbånd ikke fundet | LED tændt |
| eSGC | eSGC Kontakt luk | LED tændt |
| eSGC Kontakt Åben | LED slukket | |
| OC | OC Kontakt luk | LED tændt |
| OC Kontakt Åben | LED slukket | |
| SR1 | SR1 Kontakt luk | LED tændt |
| SR1 Kontakt åben | LED slukket | |
| SR2 | SR2 Kontakt luk | LED tændt |
| SR2 Kontakt Åben | LED slukket | |
| CAN-ERR | Status CAN Open | LED tændt |
| CAN-RUN | Status Kan åbnes | LED slukket |
Forklaring af sikkerhedskontakter
| Reduceret hoved og/eller reduceret PIT-installation | Tilstrækkelig afstand til hoved og pit i henhold til EN81-20 §5.2.5.7 / § 5.2.5.8 |
||
|---|---|---|---|
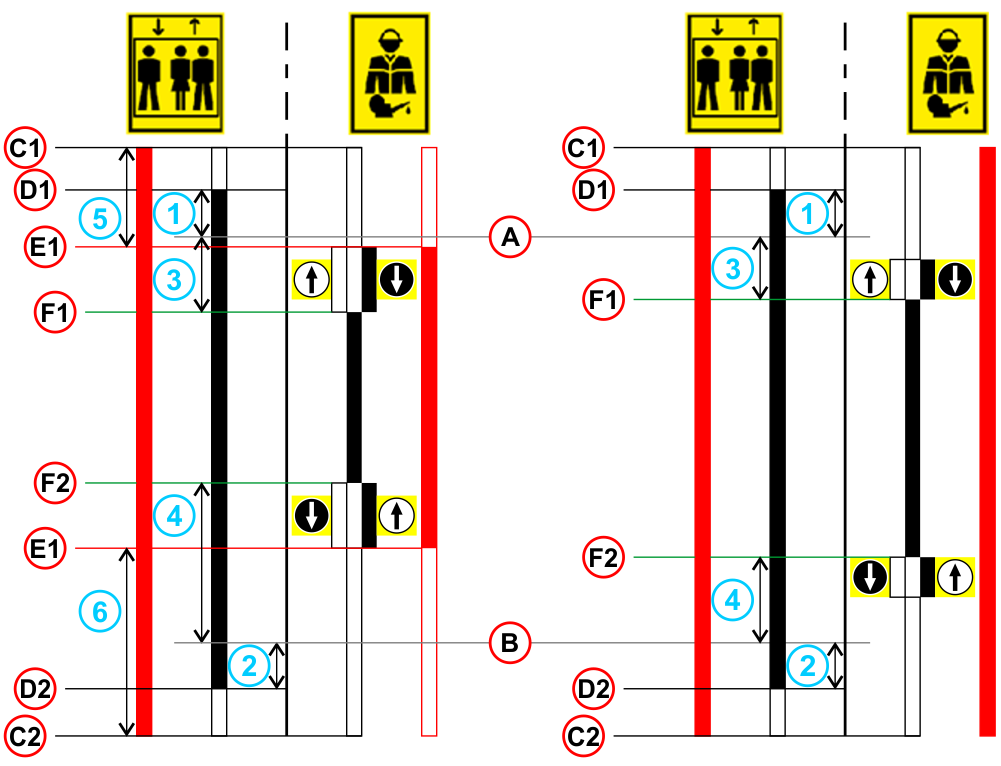 |
|||
 | Normal tilstand | A) - | Øverste etage |
 | Inspektionsfunktion | B) - | BUNDETAGE |
 | Sikkerhedskontakters status | C1) - | Øvre referenceposition |
| Inspektion OP-knap | C2) - | Lavere referenceposition | |
| Inspektion NED-knap | D1) - | Øvre endestopkontakt | |
| Endelige grænsekontakter Offset Op | D2) - | Nedre endelig grænsekontakt | |
| Endelige grænsekontakter Offset ned | E1) - | Øvre forudindstillet stopgrænse for bremsesystemet | |
| Inspektionsgrænsekontakter Offset Op | E2) - | Lavere forudindstillet stopgrænse for bremsesystemet | |
| Inspektionsgrænsekontakter Offset ned | F1) - | Øvre inspektionsgrænsekontakt | |
| Forudløst bremsesystem, offset op | F2) - | Nedre inspektionsgrænsekontakt | |
| Forudløst bremsesystem, offset ned | |||
Manuel justering af de angivne positioner er mulig fra menuen. <Positioning> Monitor Encoder (se tabellen nedenfor).
| Etikette | Side | Beskrivelse | |
|---|---|---|---|
| N_LIM_S | 7 | Øvre endelimitkontaktforskydning (forskydning over øverste etage) | |
| N_LIM_D | 7 | Nedre endelig grænsekontaktforskydning (forskydning under bundgulv) | |
| I_LIM_S | 6 | Øvre inspektionsgrænsekontakt (forskudt under øverste etage) | |
| I_LIM_D | 6 | Nedre inspektionsgrænsekontakt (forskydning over bundetagen) | |
| REJSER | 8 | Øvre forudindstillet stopgrænse (fra øvre referenceposition) | |
| TRIPD | 8 | Lavere grænse for forudindstillet stopsystem (fra nedre referenceposition) |
TRIPS- og TRIPD-værdier anvendes kun, hvis ELGO er en del af sikkerhedssystemet til reduceret hoved og/eller pit (ELGO + eSGC).
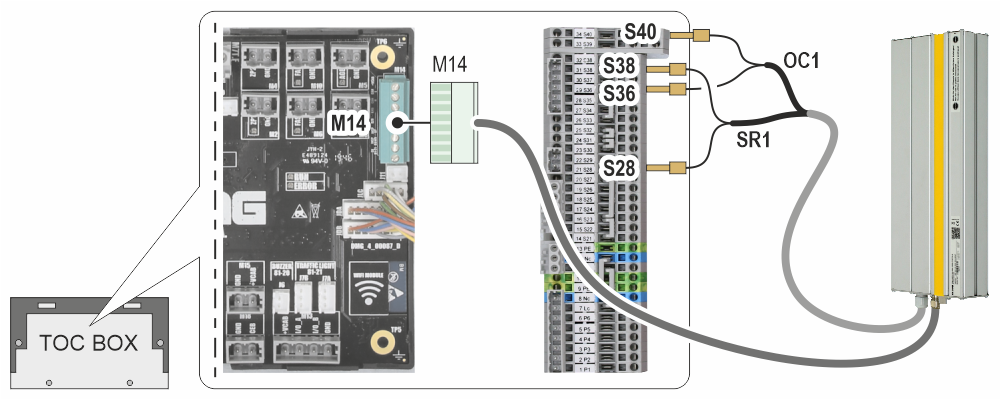
Ledninger
Tilslutning til Pitagora 4.0-controller
ELGO-enkoderen er tilsluttet direkte til TOC-boksen (øverst i kabinen).
Video-vejledning
engelsk sprog
italiensk sprog