
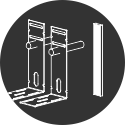
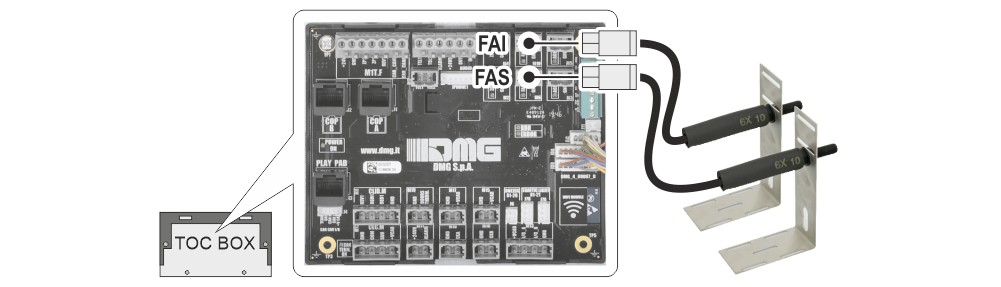
Lettori magnetici (FAI / FAS)
Questo sistema di conteggio è costituito da due lettori magnetici (FAI-FAS) con un contatto normalmente aperto montati su due staffe posizionate sulla parte superiore della cabina e da una serie di magneti posizionati sulle guide dell'ascensore.
Questo sistema di conteggio può essere utilizzato quando le caratteristiche del sistema soddisfano le seguenti condizioni:
1) Floor-to-floor distances of less than 0,4 meters (short floors)
2) Floor-to-floor distances greater than 1,8 meters
3) Speed < 0.8 m/s
Installazione

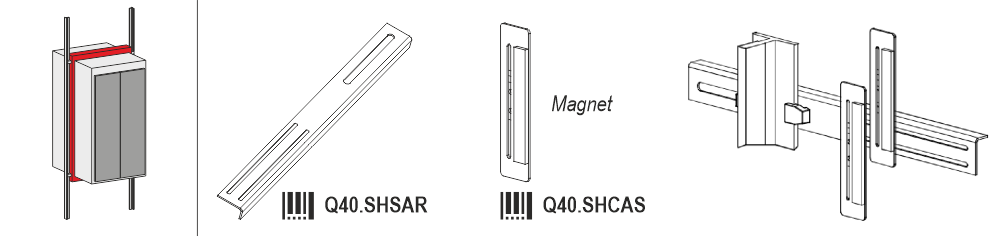
Caso A : Ascensori con meccanica ad anello
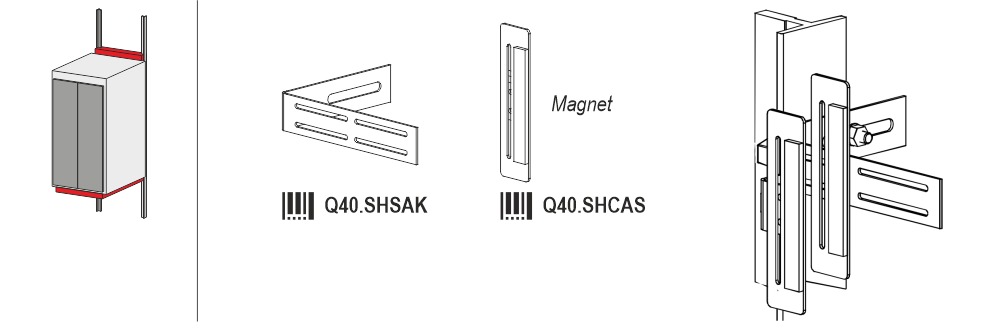
Caso B : Ascensori con meccanica a seggiola
Accessori per casi speciali
Posizionamento dei magneti sulle guide dell'ascensore
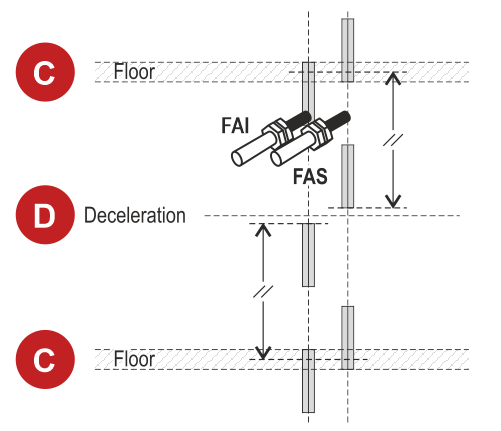
C) Piani
D) Rallentamento
Cablaggi
I lettori magnetici sono collegati direttamente alla scatola TOC (parte superiore della cabina).
Encoder motore
Questo sistema di conteggio può essere utilizzato solo su impianti con velocità inferiori a 2 m/s e senza manovre a porte aperte; funziona solo con le seguenti schede opzionali per motori Gearless ad anello chiuso:
OPC-PR Q40.SCLSC - Encoder Sin Cos
OPC-PS Q40.SCLFL - Encoder En Dat
OPC-PSH Q40.SCLSCH - Encoder Sin Cos+Hiperface
Il quadro elabora i segnali trasmessi dalle schede OPC, convertendo gli impulsi in un conteggio.
Questo sistema di conteggio ha una precisione di circa 1 millimetro.

Encoder magnetico a fune DMG
Il nuovo encoder magnetico DMG utilizza un sensore per rilevare la rotazione e la posizione di un magnete posto sull'asse della puleggia dell'encoder. Gli impulsi generati vengono ricevuti ed elaborati dal pannello di controllo dell'ascensore che calcola la posizione, la direzione e la velocità della cabina.
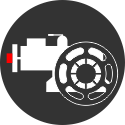
Installazione
Consigli e avvertenze
La puleggia che incorpora l'encoder deve essere installata nella parte superiore del vano o nella fossa, vicino alla sala macchine.
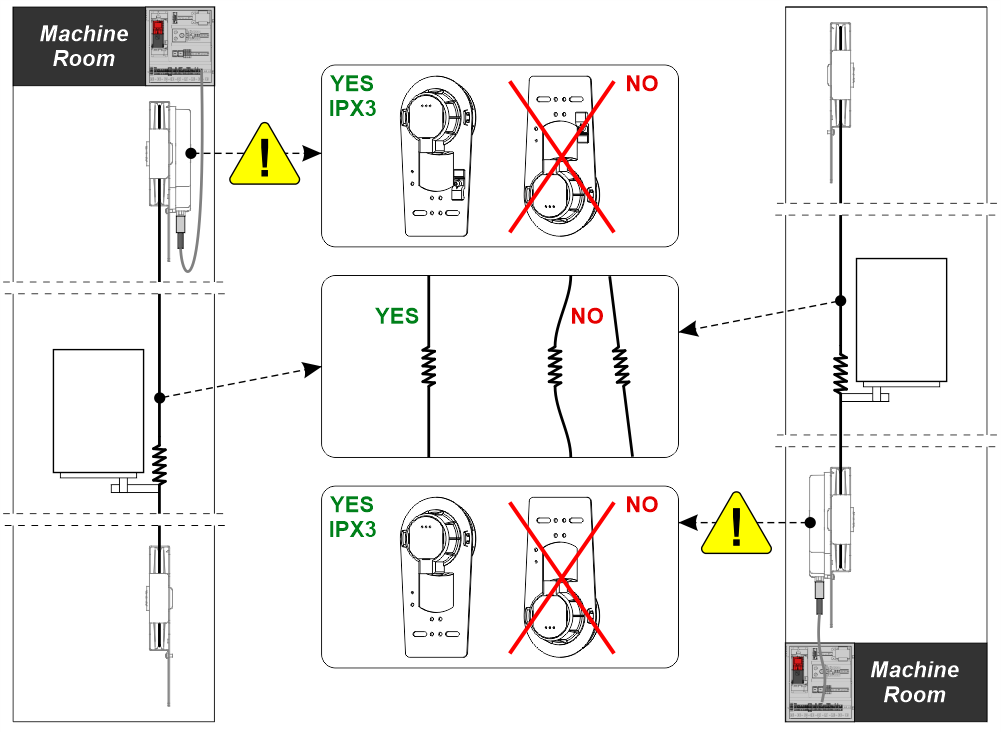
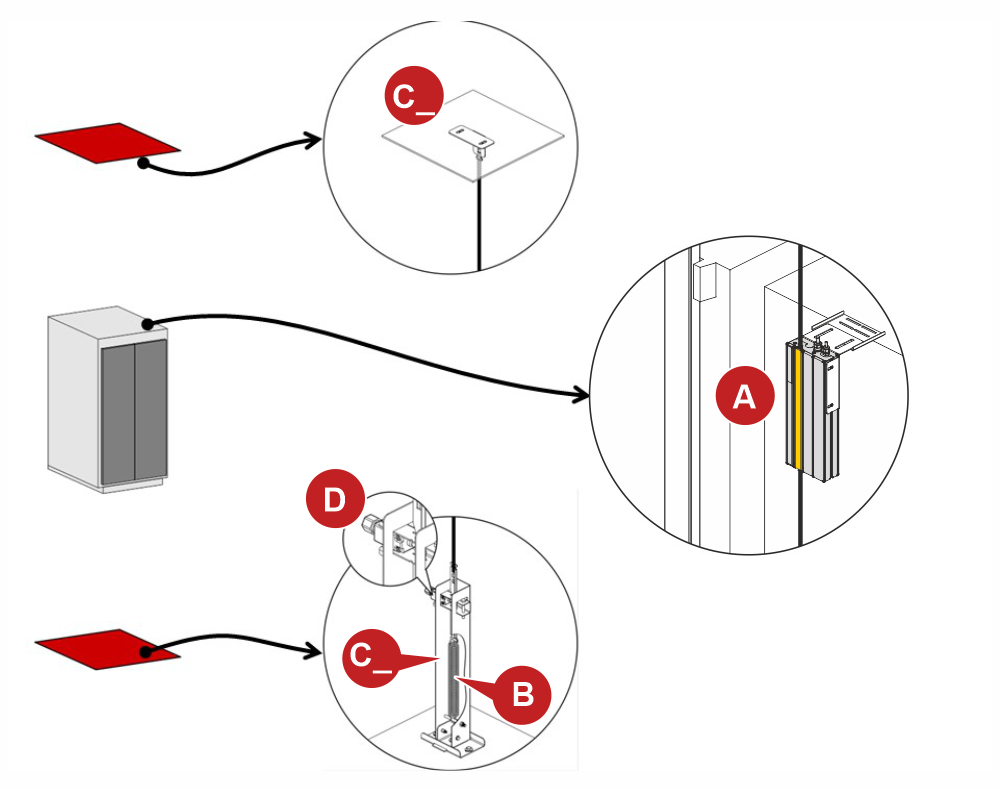
Componenti del sistema
Caso 1 : Ascensori con meccanica ad anello
Caso 2 : Ascensori con meccanica a seggiola
A) - È la puleggia dell'encoder che contiene la scheda elettronica. Può avere 2 risoluzioni:
- 1,25 mm (100 PPR) per l'encoder con etichetta rossa: Da utilizzare con Pitagora 4.0 quadro a partire dalla versione firmware 3.0.2.
- 2,5 mm (50 PPR) per l'encoder blu: Da utilizzare con il V3 / Musa / Pitagora 4.0 quadri fino alla versione firmware Y
C) - Il tenditore a molla può essere montato anche sulla parte superiore della cabina, a seconda delle necessità.
Montaggio
Il montaggio dipende dalla meccanica dell'installazione.
Caso 1 - Ascensori con meccanica ad anello
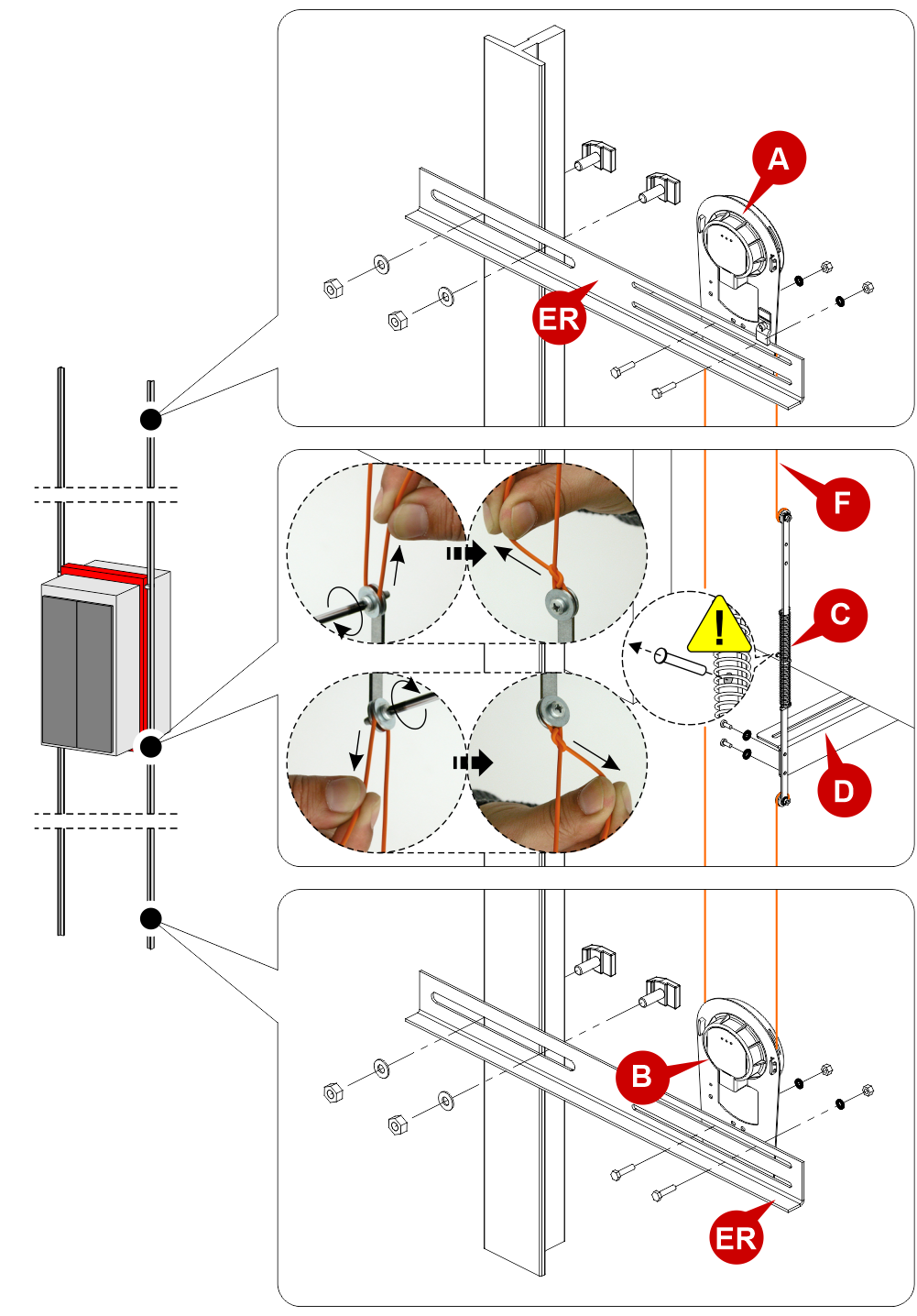
C) - Il tenditore a molla può essere montato anche sulla parte superiore della cabina, se necessario.
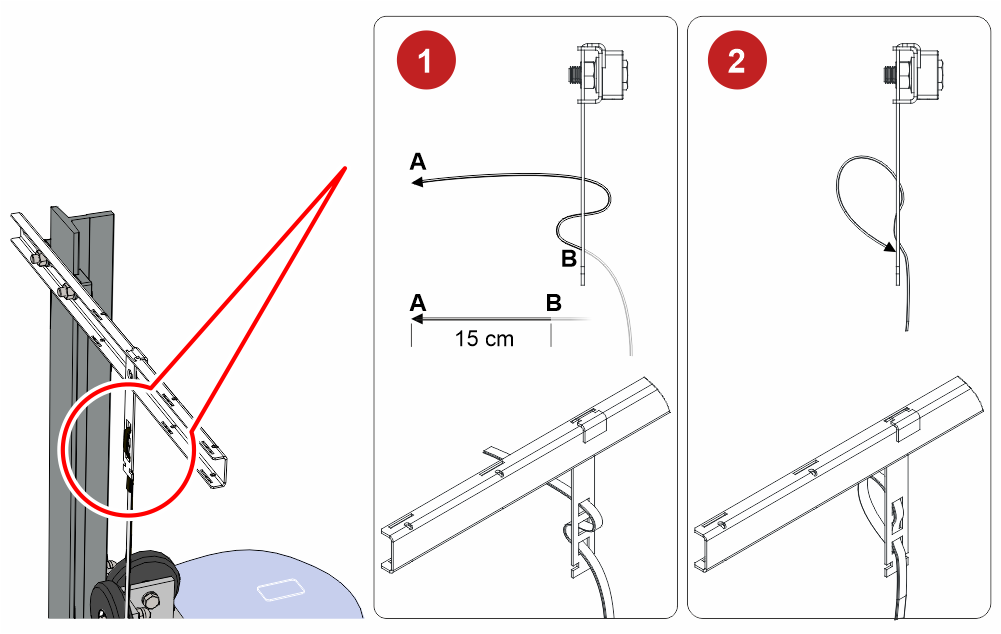
![]() Rimuovere il fermo solo al termine dell'installazione.
Rimuovere il fermo solo al termine dell'installazione.
In caso di sostituzione su vecchi sistemi, sarà necessario slegare la vecchia fune e ritensionarla dopo il montaggio del nuovo encoder.
Caso 2 - Ascensori con meccanica a seggiola
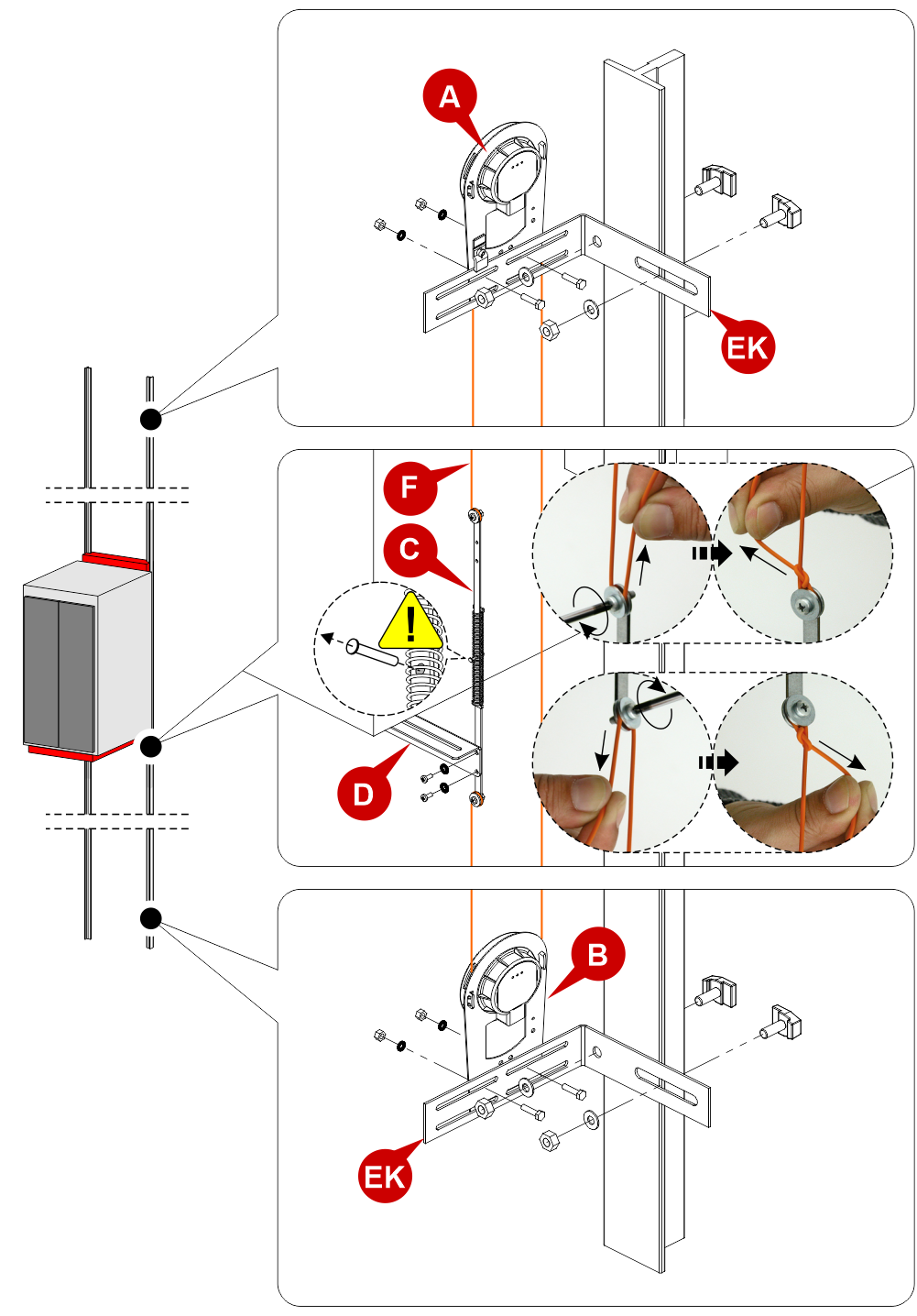
C) - Il tenditore a molla può essere montato anche sulla parte superiore della cabina, se necessario.
![]() Rimuovere il fermo solo al termine dell'installazione.
Rimuovere il fermo solo al termine dell'installazione.
In caso di sostituzione su vecchi sistemi, sarà necessario slegare la vecchia fune e ritensionarla dopo il montaggio del nuovo encoder.
Cablaggi
Collegamento al quadro Pitagora 4.0
- A partire dalla versione del firmware 3.0.2 -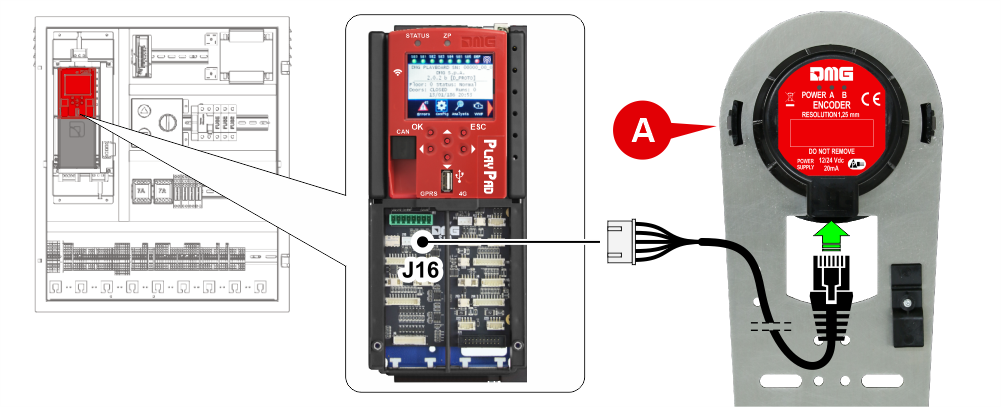 A) - Encoder con risoluzione di 1,25 mm
A) - Encoder con risoluzione di 1,25 mm
- Fino alla versione del firmware 3.0.1 -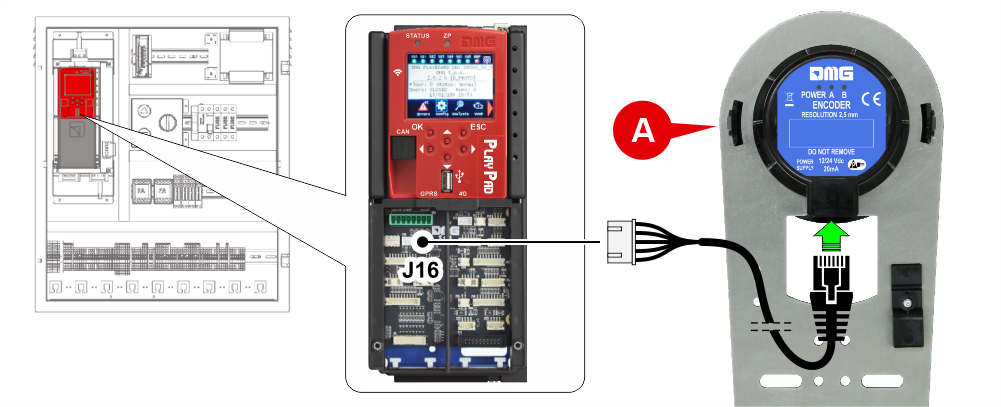 A) - Encoder con risoluzione di 2,50 mm
A) - Encoder con risoluzione di 2,50 mm
Collegamento ai quadri esistenti MUSA / PLAYBOARD V3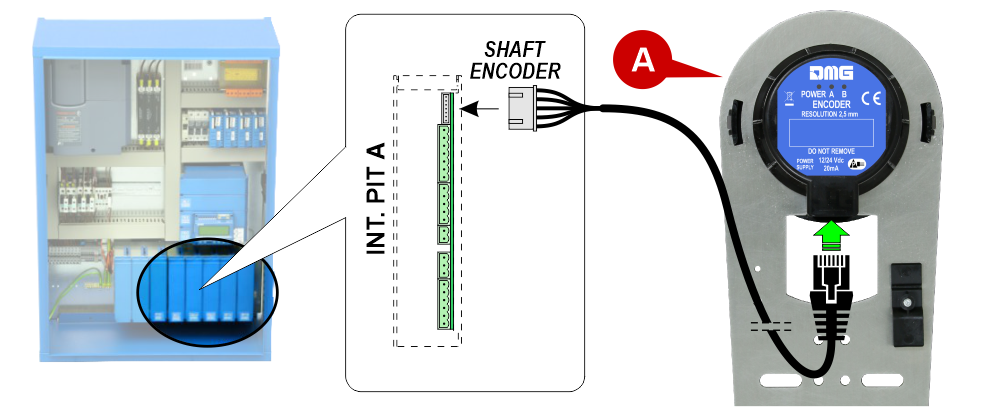
A) - Encoder con risoluzione di 2,50 mm
È possibile sostituire l'encoder a fune esistente con il nuovo encoder magnetico (risoluzione di 2,50 mm).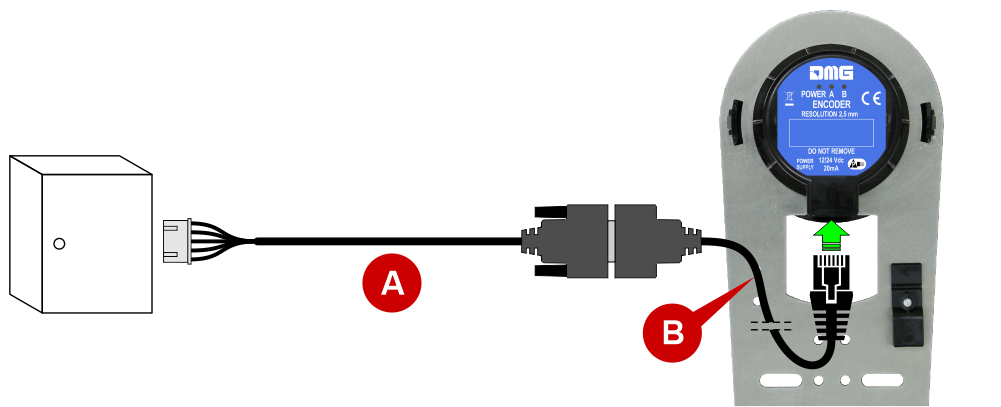
È sufficiente lasciare il cavo esistente (A) e collegarlo al nuovo encoder mediante un cavo adattatore (B).
Dopo aver sostituito l'encoder, controllare:
- Il corretto senso di rotazione in modalità di ispezione (movimento verso l'alto, aumento in mm, movimento verso il basso, diminuzione in mm). Se necessario, modificare il senso di rotazione dal sito quadro seguendo queste istruzioni:
- Impostare il quadro in Marcia Provvisoria (menu Impianto -> Marcia Provvisoria -> Sì);
- Modificare la rotazione nel menu Posizionamento del sistema -> Sistema di posizionamento -> Encoder orario/antiorario;
- Rimuovere le operazioni temporanee (menu Configurazione -> Operazioni temporanee -> No).
- Verificare il corretto allineamento della cabina su tutti i piani.Se necessario, regolare la precisione di arresto del quadro nel menu Conteggio -> Posizione Piano
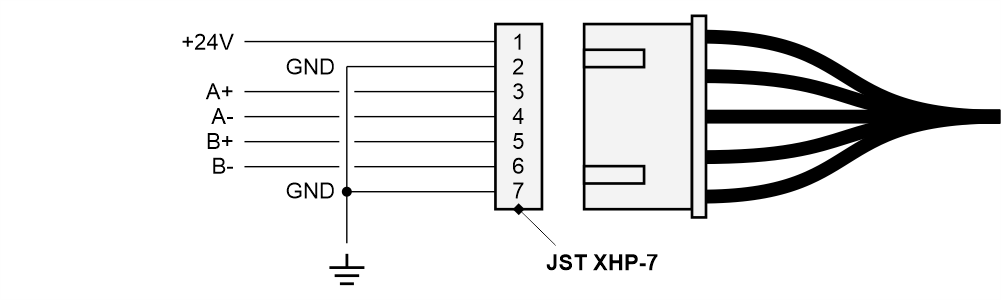
PIN OUT Connettore JST a 7 poli
LED di diagnostica

POWER: se il LED è acceso, l'encoder è alimentato.
A/B: stato delle uscite dell'encoder. Quando la cabina dell'ascensore è ferma, lo stato di questi LED non cambia (possono essere sia accesi che spenti); quando la cabina dell'ascensore è in movimento, i LED sono entrambi accesi.
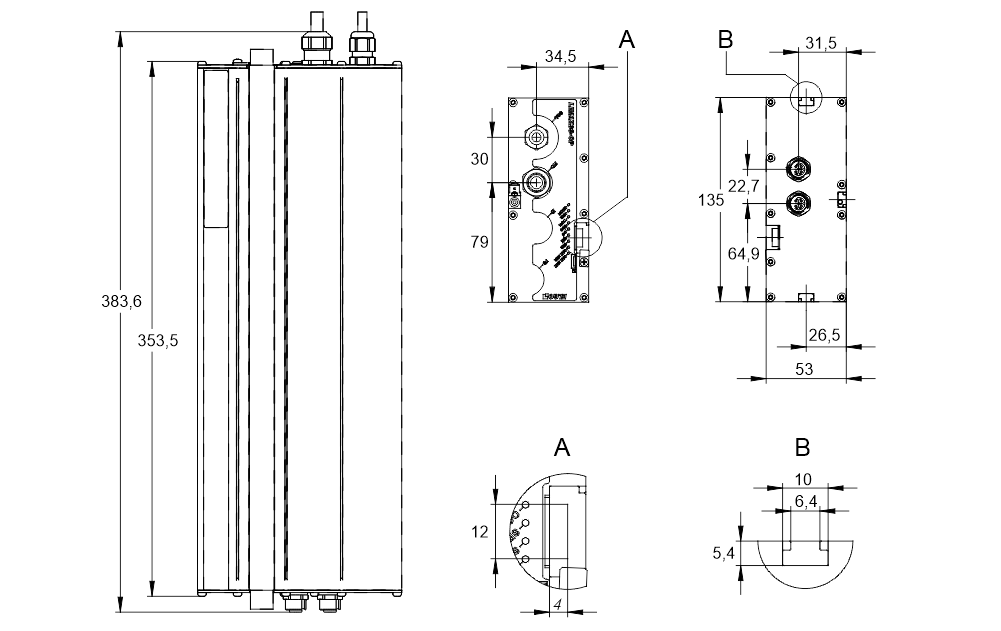
Encoder assoluto (ELGO LIMAX 33 CP)
L'encoder assoluto consente di sostituire tutti i contatti di sicurezza all'interno dell'ascensore vano. La posizione della cabina viene rilevata grazie a una banda magnetica.
Installazione
Dimensioni:
Componenti del sistema
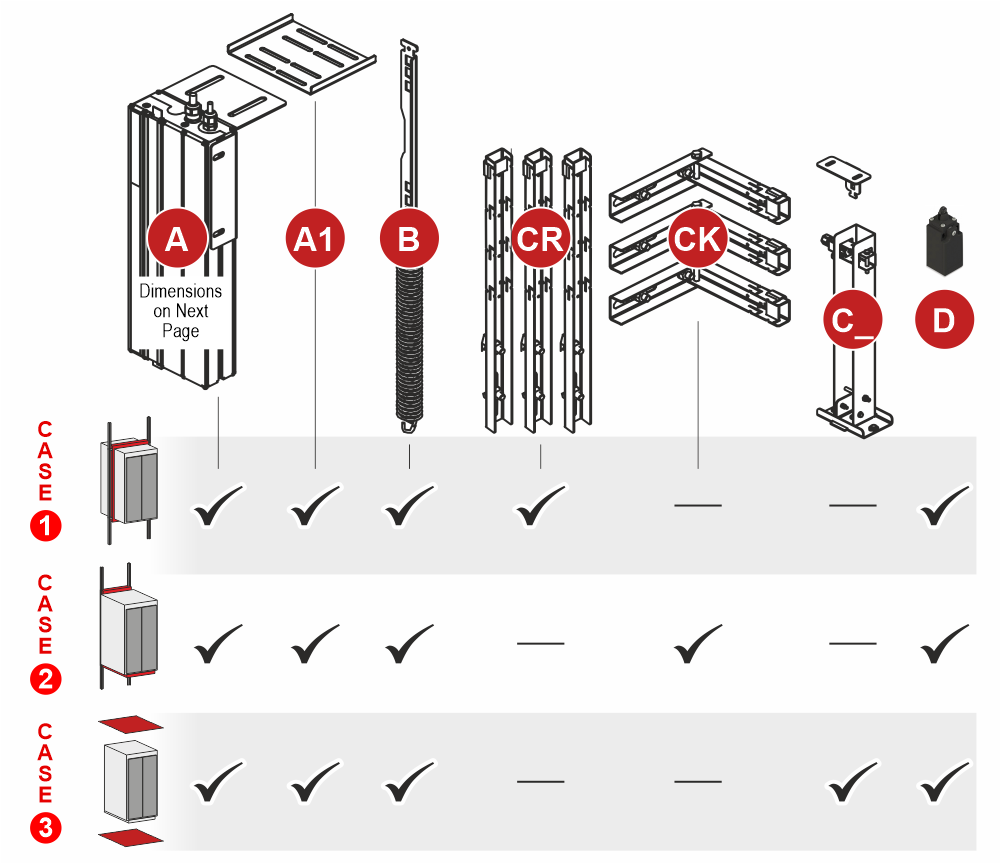
Caso 1 : Ascensori con meccanica a telaio
Caso 2 : Ascensori con meccanica a zaino
Caso 3 : Fissaggio a terra e a soffitto
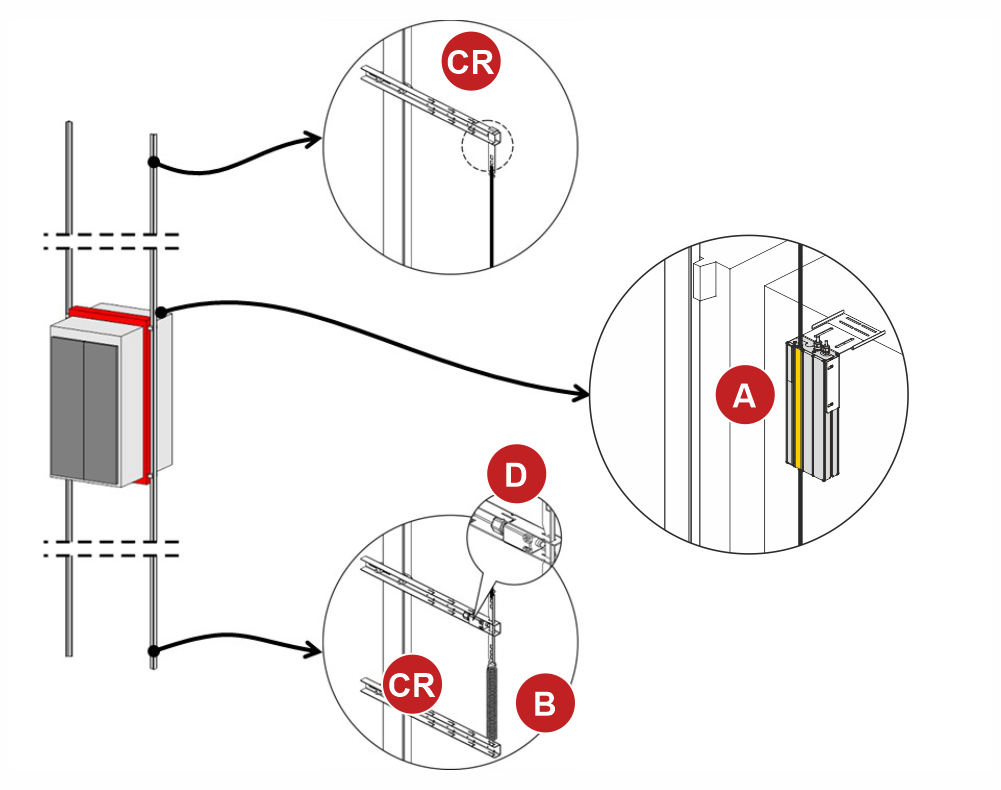
Montaggio
Caso 1 - Ascensori con meccanica ad anello
Caso 2 - Ascensori con meccanica a seggiola
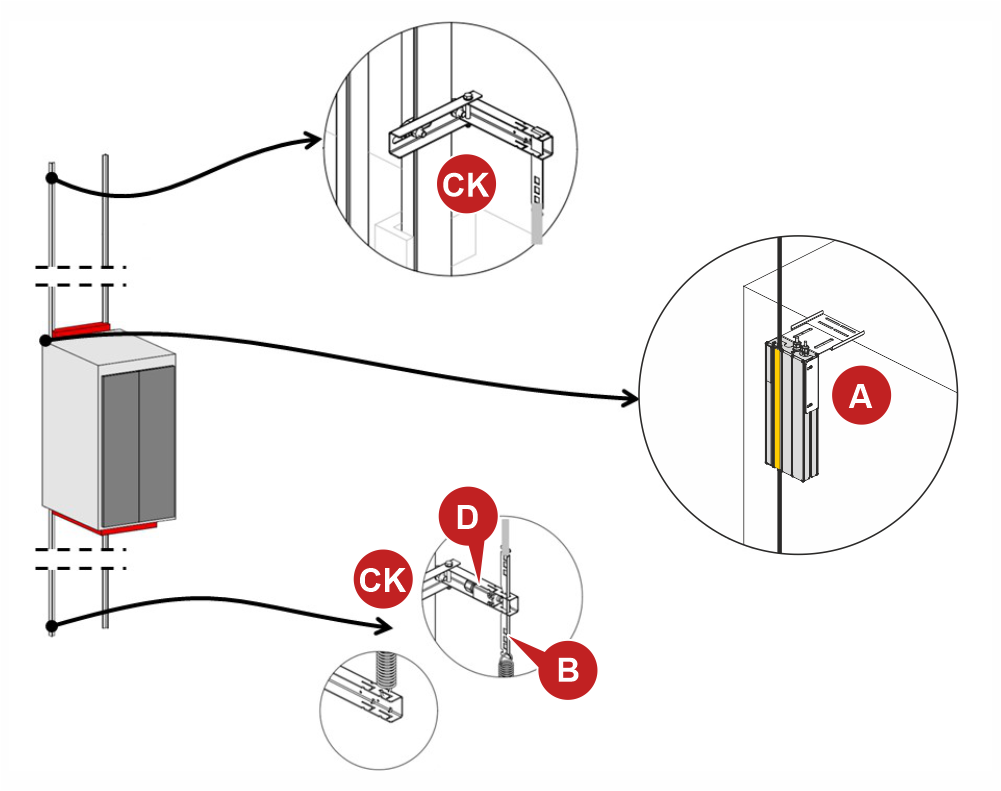
Caso 3 - Fissaggio a terra e a soffitto

Fare attenzione a posizionare la banda magnetica come indicato nelle figure seguenti.
Posizionamento corretto del nastro magnetico![]() Prima di installare il nastro magnetico, rimuovere tutti i magneti presenti nel vano.
Prima di installare il nastro magnetico, rimuovere tutti i magneti presenti nel vano.
Non installare il nastro magnetico in prossimità di motori a magneti permanenti.
Non utilizzare strumenti magnetizzati in prossimità del nastro magnetico.
Non utilizzare apparecchiature di saldatura in prossimità del nastro magnetico.
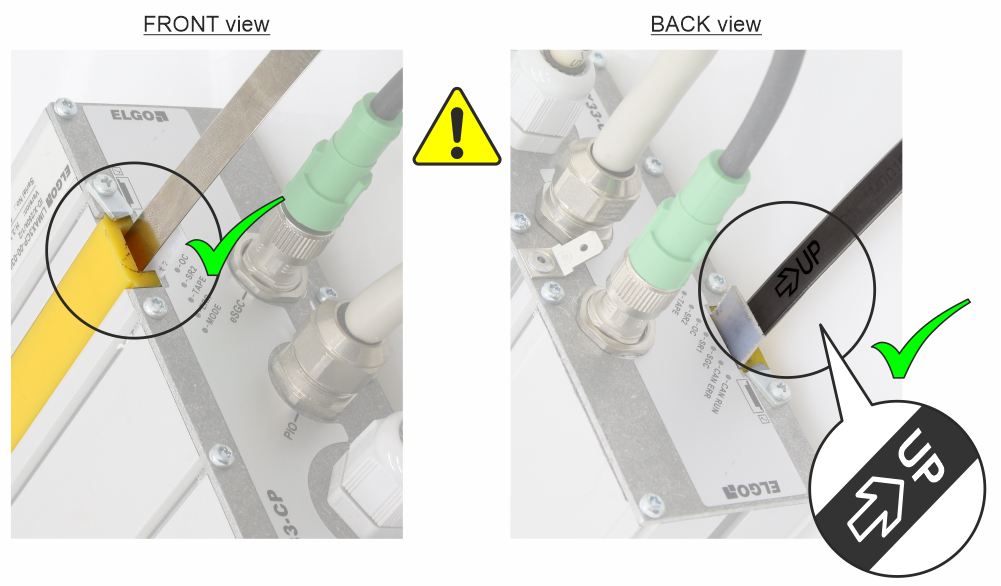
Rispettare il raccordo indicato sul nastro e assicurarsi che sia nella posizione corretta indicata nella figura seguente:
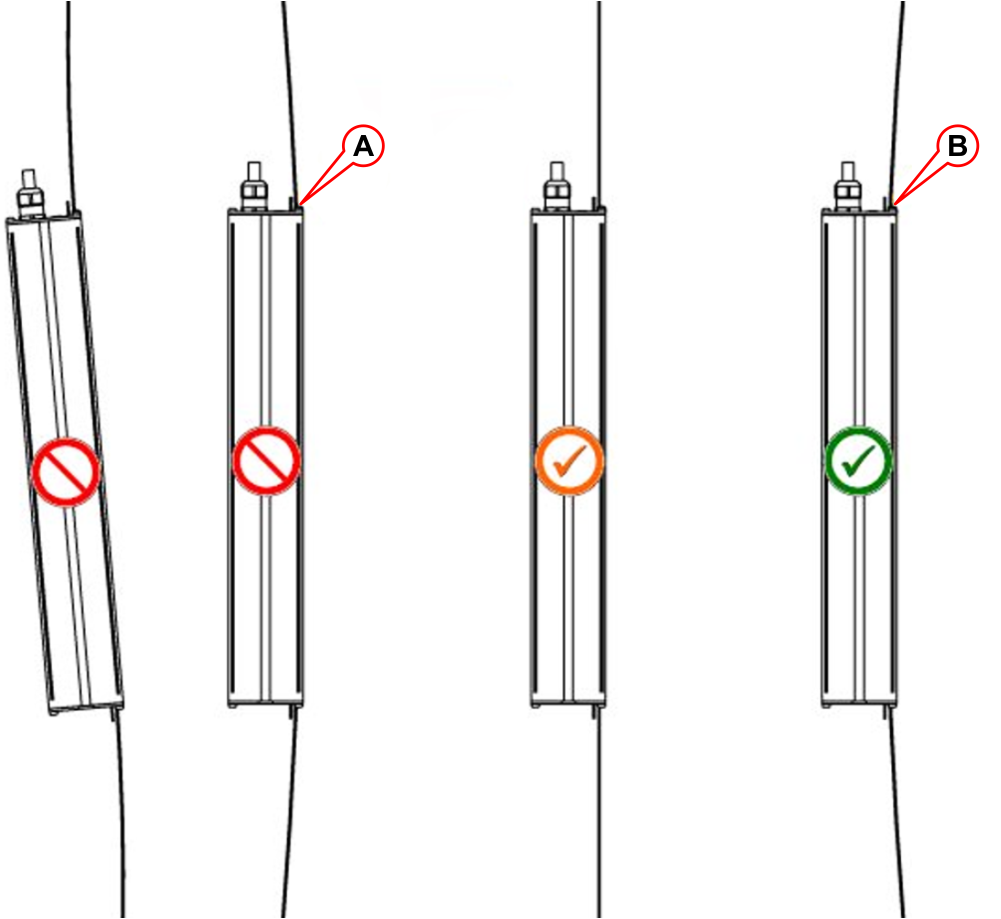
A) - Il nastro tocca la guida con il lato magnetizzato.
B) - Il nastro tocca la guida con il lato in acciaio.
LED Segnale sul dispositivo

| LED | DESCRIZIONE | |
|---|---|---|
| MODO | Modalità normale | Lampeggio lento (1 s) |
| Modalità di pre-commissione | Lampeggio veloce (0,1 s) | |
| Modalità di insegnamento | Luci permanenti | |
| ERRORE | Nessun errore | Led spenti |
| Errore generico | Led ON | |
| Errore di emergenza | Lampeggiante | |
| NASTRO | Nastro magnetico non rilevato | Led ON |
| eSGC | Chiusura del contatto eSGC | Led ON |
| Contatto eSGC Aperto | Led spenti | |
| OC | Chiusura del contatto OC | Led ON |
| OC Contatto aperto | Led spenti | |
| SR1 | SR1 Contatto chiuso | Led ON |
| Contatto SR1 aperto | Led spenti | |
| SR2 | SR2 Chiudere il contatto | Led ON |
| Contatto SR2 aperto | Led spenti | |
| CAN-ERR | Stato CAN Aperto | Led ON |
| CAN-RUN | Stato Può aprire | Led spenti |
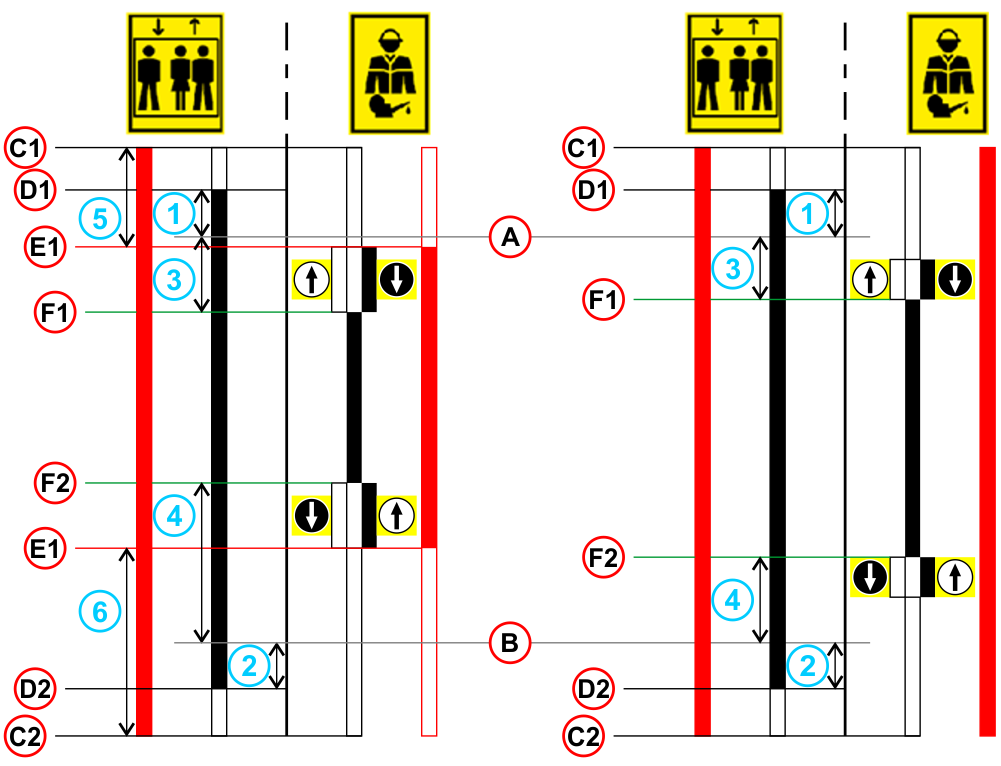
Spiegazione dei contatti di sicurezza
| Installazione di una testa ridotta e/o di un PIT ridotto | Spazio sufficiente per la testa e la fossa secondo EN81-20 §5.2.5.7 / §5.2.5.8 |
||
|---|---|---|---|
 |
|||
 | Modalità normale | A) - | piano TOP |
 | Modalità di ispezione | B) - | piano inferiore |
 | Stato dei contatti di sicurezza | C1) - | Posizione di riferimento superiore |
| Pulsante di ispezione SU | C2) - | Posizione di riferimento inferiore | |
| Ispezione Pulsante GIÙ | D1) - | Finecorsa finale superiore | |
| Finecorsa finali Offset Up | D2) - | Finecorsa finale inferiore | |
| Finecorsa finali Offset Down | E1) - | Limite superiore del sistema di arresto preattivato | |
| Finecorsa di ispezione Offset Up | E2) - | Limite inferiore del sistema di arresto preattivato | |
| Finecorsa di ispezione Offset Down | F1) - | Finecorsa di ispezione superiore | |
| Sistema di arresto pre-triggerato Offset Up | F2) - | Finecorsa di ispezione inferiore | |
| Sistema di arresto pre-triggerato Offset Down | |||
Per la regolazione manuale della posizione delle indicazioni è possibile accedere al menu <Positioning> Monitor Encoder (vedi tabella sotto).
| Etichetta | Pagina | Descrizione | |
|---|---|---|---|
| N_LIM_S | 7 | Offset del finecorsa finale superiore (offset rispetto al piano superiore) | |
| N_LIM_D | 7 | Offset del finecorsa finale inferiore (offset sotto il piano inferiore) | |
| I_LIM_S | 6 | Finecorsa di ispezione superiore (disassato sotto il piano superiore) | |
| I_LIM_D | 6 | Finecorsa di ispezione inferiore (disassato rispetto al piano inferiore) | |
| VIAGGI | 8 | Limite superiore del sistema di arresto pre-segnalato (dalla posizione di riferimento superiore) | |
| TRIPD | 8 | Limite inferiore del sistema di arresto precoordinato (dalla posizione di riferimento inferiore) |
I valori TRIPS e TRIPD sono utilizzati solo se ELGO fa parte del Sistema di sicurezza per testa e/o fossa ridotta (ELGO + eSGC).
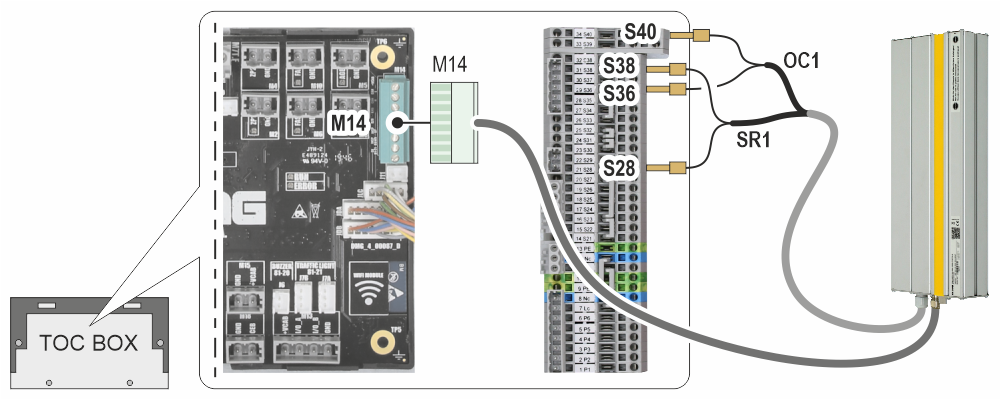
Cablaggi
Collegamento al quadro Pitagora 4.0
L'encoder ELGO è collegato direttamente alla scatola TOC (parte superiore della cabina).
Video tutorial
Lingua inglese
Lingua italiana