
Integroitu ohjelmointimoduuli
Emolevyssä on integroitu ohjelmointimoduuli, jonka avulla voidaan tarkastella ja muokata kaikkia ohjainhallinnan ja -konfiguroinnin perusparametreja. VVVF-versiossa voidaan tarkastella ja muokata myös FUJI:n peruskonfiguroinnin (VVVF BASE -valikko) ja edistyneen konfiguroinnin (VVVF ADVANCED -valikko) parametreja.
Ohjelmointinäppäinten toiminnot

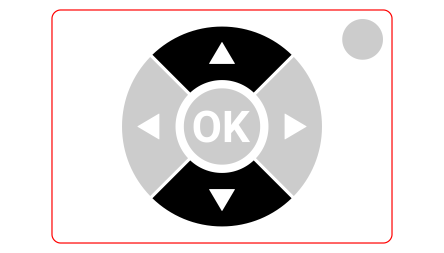 | Valikon navigointinäppäimet ja parametrien valintanäppäimet. |
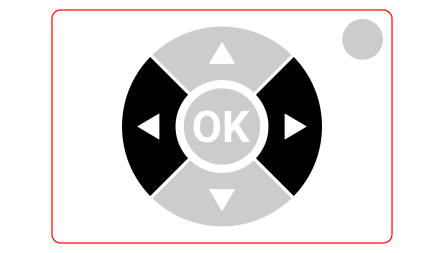 | Valikon syvyysnavigointinäppäimet (eteenpäin ja taaksepäin). |
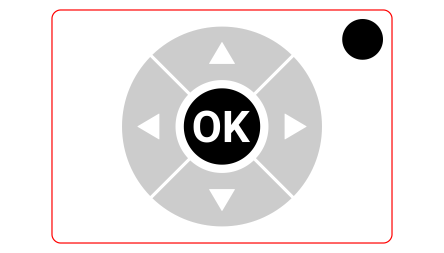 | OK-painike: Painike, jolla pääsee valittuun valikkoon ja vahvistaa valitun parametrin. ESC-painike: Palaa yhden tason taaksepäin valikossa. |
Ohjelmointivalikko ja järjestelmäparametrien muuttaminen
Ohjelmointivalikkoon pääsy
Siirry Emulointi-valikkoon ohjelmointiparametrien määrittämiseksi.

Asetusvalikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| A1 | Väliaikaiset toiminnot | Järjestelmän väliaikaisen toimintatilan aktivointi |
| A2 | Testaus ja mittaukset | Automaattiset testit, jotka helpottavat lopullisia tarkastuksia ennen järjestelmän käyttöönottoa normaalikäytössä |
| A3 | Pääsykoodi? | Asetusvalikkoon pääsyn salasanan määrittäminen |
| A4 | Johdotuksen tyyppi | Ohjaimen ja hytin/kerrosten välisen johdotuksen tyyppi |
| A5 | Valvonnan tyyppi | Hissin ja keräystilan ohjausmuoto |
| A6 | Vetotyyppi | Vetovoima VVVF tai hydraulinen hissi (suora käynnistys / pehmeä käynnistys / tähtikolmio) |
| A7 | Kerrosten lukumäärä | Asennuksen kerrosten lukumäärä |
| A8 | Uudelleentasaus | Parametri, joka aktivoi ja hallitsee tasapainotusliikkeen (pakollinen hydraulisissa järjestelmissä, valinnainen VVVF-järjestelmissä) |
| A9 | Pääkerros | Pääkerroksen sijainti (kaikki tämän kerroksen alapuolella olevat puhelut palvelevat vain ylöspäin, jos ne ovat alaspäin kollektiivisia) |
| A10 | Hidas vikakesto | Aika ennen hitaan nopeuden vian (vika #3) aktivoitumista |
| A11 | Kesto: | Aika ennen juoksuaikavirheen #26-27 aktivoitumista |
| A12 | Puhelut 16IO-kortilla | Parametri, joka määrittää 16IO-liitäntälevyn käyttötilan terminaalikabinin liitäntöjen tapauksessa: 1) 16IO A -levy: 16IO-levyä käytetään paneelin ainoana liitäntälevynä terminaalikabinin kutsujen hallintaan (enintään 12 kerrosta) 2) 16IO B -kortti: 16IO-korttia käytetään paneelin toisena liitäntäkorttina terminaalihissien kutsujen hallintaan (enintään 12 kerrosta) 3) 16IO A+B -kortti: kahta 16IO-korttia käytetään samanaikaisesti terminaalihissien kutsujen hallintaan (enintään 28 kerrosta) |
| A13 | Ryhmätoiminta | Ryhmätoiminnon tyyppi (Simplex / Multiplex / Multiplex light) |
| A14 | Monikanavainen kokoonpano | Parametrit multipleksikonfiguraatiolle. Hissin sijainti ryhmässä; Painikkeiden rivi; Multipleksikerrokset; Multipleksipoikkeama; Pitkä painallus multipleksikutsussa; |
| A15 | Monikanavainen puhelu | Monikerroksisissa asennuksissa kerroskutsu voidaan erottaa toisistaan painamalla painiketta pitkään (yli 3 sekuntia) kutsumalla: a) Asennus, jossa on alempi ”Lift No (LN)” -parametri (esimerkiksi jos kyseessä on kaksikerroksinen asennus, jossa on suuri hissikori vammaisille matkustajille ja pienempi hissikori, suurempi hissikori on asetettava arvoksi ”1” ja toinen arvoksi ”2”; b) ”Epäsymmetrisessä kerrosten jakautumisessa” järjestelmässä asennus, joka voi saavuttaa alimman/ylimmän tason. |
Ovet-valikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| D0 | Kameran aktivoinnin viive | Viive ennen aktivointia |
| D1 | Eläkkeelle jäävän kameran deaktivoinnin viive | Viive ennen poistuvan rampin deaktivointia |
| D2 | Lukitusvirheen viive | Viive ennen oven lukon vian aktivoitumista (vika #9) |
| D3 | Oven avautumisen viive | Viive ennen automaattisen oven avautumista (saavuttaessa kerrokseen) |
| D4 | Pysäköintiaika avoimilla ovilla | Pysäköintiaika kerroksissa, joissa ovet ovat auki ennen oven sulkemiskomentoa |
| D5 | Oven sulkeutumisen viive | Viive ennen oven sulkeutumista rekisteröityjen puheluiden tapauksessa |
| D6 | Käyttötila | Käyttökertojen määrä ja oven avaamisen logiikka |
| D7 | Tyyppi Ovi A | Otyyppi sisäänkäynnille A: 1) Täysin automaattinen: hissikori + kerrosten automaattiovet; 2) Hissikori automaattinen: manuaaliset ovet kerroksissa, hissikorin ovet automaattiset; 3) Manuaalinen: manuaaliset ovet kerroksissa, hissikorin ovet manuaaliset tai ei ole; 3) Hissikorista riippumaton: manuaaliset ovet kerroksissa, hissikorin ovet riippumattomat; |
| D8 | Ovi A rajakytkimellä | Oven A rajakytkin (ei ole manuaalisissa ja itsenäisissä ovissa) |
| D9 | Pääsy asettelu A-puoli | Asennuksen A-puolen pääsylayout: pääsy jokaiseen kerrokseen ja (automaattiovien osalta) pysäköintityyppi (ovet auki tai kiinni). ”NO”: pääsyn pysyvä poissulkeminen pysähdysten kokonaismäärästä ”Not enabled”: pääsyn väliaikainen poissulkeminen. |
| D10 | Ovi A Aukiolo-/sulkemisaika | Oven avaamisen/sulkemisen kesto (ovet ilman rajakytkimiä) |
| D11 | Ovi A sähkötoiminen | Ovi A on jatkuvasti virralla ajon aikana (ovi kiinni) tai kerroksessa (ovi auki) |
| D12 | Tyyppi Ovi B | Oven tyypin valinta sisäänkäynnille B (katso oven tyyppi A): |
| D13 | Ovi B rajakytkimellä | Oven B rajakytkin (ei ole manuaalisissa ja itsenäisissä ovissa) |
| D14 | Pääsy layout Side B | Asennuksen B-puolen pääsylayout: pääsy jokaiseen kerrokseen ja (automaattiovien osalta) pysäköintityyppi (ovet auki tai kiinni). ”NO”: pääsyn pysyvä poissulkeminen pysähdysten kokonaismäärästä ”Not enabled”: pääsyn väliaikainen poissulkeminen. |
| D15 | Ovi B Auki/kiinni-aika | Oven avaamisen/sulkemisen kesto (ovet ilman rajakytkimiä) |
| D16 | Ovi B sähkötoiminen | Ovi B on jatkuvasti virralla ajon aikana (ovi kiinni) tai kerroksessa (ovi auki) |
| D17 | Ennakko-avaus | Ovien avaaminen ennenaikaisesti (ennen kuin vaunu pysähtyy) |
| D18 | Valokenno tyyppi | Valokennon tyypin valintaparametri: NO-valokenno: kosketin avautuu, jos säde on vapaa. Kosketin sulkeutuu, jos säde keskeytyy. Iskun, valokennon ja avoimen oven koskettimet on kytkettävä rinnakkain. NC-valokenno: NO-valokennon vastakohta. Iskun, valokennon ja avoimen oven koskettimet on kytkettävä sarjaan. HUOMAUTUS: Iskun, valokennon ja avoimen oven koskettimien on oltava kaikki samaa tyyppiä (NO tai NC). |
| D19 | Oven kosketusviive | Viive ennen käynnistystä (kuluneiden turvakoskettimien pomppimisen kompensoimiseksi) |
Signaalit-valikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| Viiveen loppuprioriteetti | Prioriteettitilan pitoaika ennen kerroksen tai hissikutsun uudelleenaktivointia. Jos CABIN PRIORITY -toiminto on aktivoitu (DMCPIT-kortin tulosta): Järjestelmän odotusaika toiminnon deaktivoinnin jälkeen ennen kerroskutsun uudelleen tallennusta. Jos LOP PRIORITY -toiminto on aktivoitu (BDU-tulosta): Järjestelmän odotusaika toiminnon deaktivoinnin jälkeen ennen hissi-/kerroskutsun uudelleen tallennusta. Huomautus: UNIVERSAL-toiminnolla varustetuissa järjestelmissä tämä parametri määrittää BUSY-tilassa vietetyn ajan. | |
| LOP-palaute | Ota käyttöön lattiapainikkeiden vilkkuva tila rekisteröinnin yhteydessä. | |
| AUX-lähdöt | 16 RL-kortin (jos käytössä) ja BDU:iden apulähdöt asetetaan. Asetukset on tehtävä vaiheittain, ensin RL-1, sitten RL-2 ja lopuksi BDU. RL-1-kortin käytettävissä olevat lähdöt: 1-johtiminen/kerrosnäyttö / ”Hissi kerroksessa” -signaali / Kerrosvalo / Gray / 9-segmenttinen näyttö / ”Hissi tulossa” -signaali / 1-johtiminen/kerros HYD RL-2-kortin käytettävissä olevat lähdöt: ”Hissi kerroksessa” -signaali / Kerrosvalo / Gray / 9-segmenttinen näyttö / ”Hissi tulossa” -signaali OUT-1- ja OUT-2-lähtöjen yhdistelmät BDU:ille: Tyyppi 0 = Hissi kerroksessa + Poissa käytöstä Tyyppi 1 = Ylös-nuoli + Alas-nuoli Tyyppi 2 = Hissi kerroksessa + Hissi tulossa Tyyppi 3 = Hissi kerroksessa + 3-johtiminen näyttö Huomautus: Konfiguraatio on ensin yleinen ja sitten kunkin kerroksen erityinen (esimerkki: nuolet kaikkiin kerroksiin ja 3-johtiminen näyttö pääkerrokseen). Katso lisätietoja DIDOsta. | |
| Automaattinen kerroksen nimeäminen | Tämä parametri määrittää pianon alaosaan (”Floor 0”) määritetyn pianon numeerisen arvon. Sarjanäyttö näyttää automaattisesti kasvavan numeron jokaisessa seuraavassa kerroksessa. | |
| Manuaalinen lattian nimitys | Sarjanumeroiden manuaalinen asettaminen sarjanumeroiden sijainnin osoittimille. Asetus on tehtävä jokaiselle kerrokselle. | |
| Laukaiseva tekijä PV:ssä | Parametri, joka aktivoi puheensyntetisaattorin / seuraavan suunnan nuolet hidastuspisteessä (Kyllä) tai kerrokselle saapumisen yhteydessä (Ei). | |
| Seuraavat suuntanuolet | Parametri, joka aktivoi puheensyntetisaattorin / seuraavan suunnan nuolet hidastuspisteessä (Kyllä) tai kerrokselle saapumisen yhteydessä (Ei). | |
| Hytin valon ajastin | Ajastin hytin valolle kerrokselle saapumisen jälkeen. Kun parametri on asetettu arvoon 0 s, ajastin ei ole aktiivinen (valo on aina päällä). | |
| Viive EME | Moniparametri automaattiselle paluulle kerrokselle hätätilanteessa (katso https://dido.dmg.it/it/knowledge-base/p40-emergency-operations/). Arvo #1: Automaattisen paluun tyyppi: Tyyppi A = paluu lähimpään kerrokseen (hätätilanne 81.20 ja 81.1 UPS:llä) Tyyppi B = paluu lähimpään kerrokseen (integroitu hätätilanne vaihteettomalle 81.20) Tyyppi C = paluu MAIN-kerrokseen (hätätilanne 81.20 ja 81.1 UPS:llä) Tyyppi D = erityinen evakuointitoiminto laivojen hisseille (RNO). Arvo 2: Viive ennen hätätilannekäynnin aloittamista (IME:n virrankatkosilmaisimesta). Huomautus: hydraulijärjestelmissä lasku tapahtuu aina alimmalle tasolle. | |
| Summeri 81-21 | EN81.20-akustisen signaalin (oven ohitus) aktivointi myös osoittamaan passiivisten 81.21-suojien läsnäolo järjestelmissä, joissa on pienempi kuilu/pääntila. | |
| Aluksen toiminnot | Risteilyaluksiin asennettujen hissien erityistoimintojen käyttöönotto. | |
| Piippaus pysähdyksessä | Aktivoi äänimerkin varoitussignaalin hissin ovipaneelissa, kun hissi saapuu kerrokseen. |
Erikoistoiminnot-valikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| Nollaa suunta | Reset-menettelyn aikana tapahtuvan liikkeen suunta | |
| Tarkastuksen matkustusrajoitukset | (Vain magneettisten lukijoiden paikannusjärjestelmälle) Määrittää liikkeen rajat tarkastustilassa. Jos asetuksena on ”Beyond AGB/AGH”, ohjain ei salli liikettä ylä-/alakerrosten ulkopuolelle. | |
| Palomiehet Operaatio | Hissien osalta, joissa on palomiehen toiminto, tämä moniparametrinen asetus määrittää palomiehen toiminnon tyypin ja siihen liittyvät asetukset jokaiselle kerrokselle (palautuspuoli, POM- ja CPOM-avainkoskettimien tyyppi). | |
| Palonilmaisin | Palonilmaisun parametri kerroksissa. jos hissi on eri kerroksessa kuin palo on havaittu, kaikki rekisteröidyt puhelut tältä kerrokselta tai tälle kerrokselle peruutetaan; jos hissi on kerroksessa, jossa palo on havaittu, ohjain estää ovien avaamisen, sulkee ovet (jos ne ovat auki palon havaitsemisen hetkellä) ja lähettää hissin turvalliselle kerrokselle. | |
| Pysäytyspainikkeen rekisteröinti | Järjestelmä rekisteröi pois käytöstä -tilan (STOP-painikkeen painallus). On myös mahdollista asettaa viive, jotta vältetään samanaikainen liike generaattorilla toimivissa asennuksissa. | |
| EN 81-20 | Parametri, joka konfiguroi järjestelmän EN 81-20 -standardin mukaisesti. Jos asetukseksi valitaan ”YES”, seuraavat toiminnot otetaan käyttöön: tarkastuspainikkeiden paneeli kuilun pohjalta; pääsynvalvonta kuilussa; UCM:n läsnäolon valvonta; hissikopion ovien toisen koskettimen valvonta; ovien valokennosilmä NC-koskettimella (normaalisti suljettu). | |
| Haittojen torjunta-asetus | Vaihtoehto, joka rajoittaa luvattomia aktivointeja. Arvo määrittää pysähdysten enimmäismäärän ilman valokennon katkaisua (automaattisissa ovissa) tai oven avaamista (manuaalisissa ovissa), jonka ylittyessä kaikki hytistä tulevat kutsut peruutetaan. | |
| Poissa käytöstä -kerros | Hissin poissa käytöstä -tason kohde (HS-tulo aktivoitu). | |
| Automaattinen paluu lattialle | Automaattisen paluun lattiaan -toiminnon useita parametreja. Määrittää paluuvirtauksen ja vähimmäisodotusaikansa ennen automaattisen paluun aktivoitumista. | |
| Paluualueet | Lisäasetukset palautukselle kerroksessa suunnitelluina aikoina / päivinä: -) Päivä (0 = joka päivä, 1 = maanantai … 7 = sunnuntai); -) Valittu aikaväli (4 aikaväliä päivässä); -) Palautuskerros; -) Aloitusaika; -) Loppuaika (enimmäisaika: 7h 45 min); | |
| R. vyöhykkeen ajoitus | Valittujen palautusalueiden ajoitus | |
| Soita poistaminen kerroksessa | Pysäyttämällä hissin pysähtyvän kerroksen kutsut tarkistamatta kulkusuuntaa (vaihtoehto voimassa vain täydessä kollektiivisessa käytössä) | |
| Drift-ohjaus (Ranska) | Drift-kontrolli (NF P82-212) | |
| Hytin avauskoodi / Penthouse | Voit määrittää 4-numeroisen koodin hissihuoneen kutsun aktivoimiseksi. Tämä vaihtoehto voidaan aktivoida jokaiselle kerrokselle, jotka on merkitty tunnuksilla BC0…BC27. Katso käyttöohjeet DIDO-sivuston kohdasta ”Access Protection” (Pääsyn suojaus). Huomautus: Koodin ”0 _ _ _ ” syöttäminen aktivoi PentHouse-toiminnon kyseiselle kerrokselle. | |
| Konehuoneen lämpötilan tarkistus | Mahdollistaa konehuoneen ympäristön lämpötilan säätämisen suhteellisen anturin avulla (jos sellainen on). Jos lämpötila ylittää asetetun minimi- tai maksimirajan yli 30 sekunnin ajan, järjestelmä pysähtyy kerroksessa ja näyttöön tulee virhe 39 ”Ympäristön lämpötila”. Kahden rajan asettamisen lisäksi on tarpeen asettaa ympäristön lämpötila vahvistamalla tai muokkaamalla havaittu lämpötila. Huomautus: Ohjaus on aktiivinen vain normaalikäytössä tai hytin prioriteettitilassa. | |
| Automaattiset puhelut | Aktivoi automaattisen testitilan, joka simuloi jopa 120 puhelua ohjelmoitavissa olevilla 10–60 sekunnin välein. On myös mahdollista aktivoida tai deaktivoida oven avaaminen (jos toiminto on aktivoitu, järjestelmä hyväksyy myös kerrospuhelut samalla kun se simuloi aikataulun mukaisia puheluita). Toiminto lopetetaan automaattisesti, kun järjestelmä sammutetaan ja/tai järjestelmä asetetaan tarkastustilaan. | |
| Seuraa UCM:ää | UCMP-hallintaratkaisu | |
| UCM | Asennustyyppi 81-1 / 81-20 / 81-21 Akselin käyttömenettely ja suojaukset. | |
| Pakotettu pysäytys | Parametri, joka määrittää kerroksen pakolliseksi. Jos tämä parametri on aktivoitu, järjestelmä pysähtyy kyseisellä kerroksella jokaisella kierroksella. | |
| Suojattu lattia | Parametri, joka määrittää kerroksen suojatuksi yhdessä ”Live+”-toiminnon kanssa. Saavuttaessa suojattuun kerrokseen ovet avautuvat vain nimenomaisella suostumuksella (painamalla oven avauspainiketta), muuten järjestelmä palaa edelliseen kerrokseen. | |
| LOP-prioriteetti | Ottaa käyttöön kerroksen prioriteettipuheluominaisuuden. Vaatii Pitagora 16 I/O -kortin (tai avainkytkimen tulon kerroksen BDU:sta). | |
| Ota lattia käyttöön | Puhelujen mahdollistava toiminto (esim. kortinlukija). Vaatii apulaitteen 16 I/O-kortin. Tyyppi 1: LOP-mahdollistaminen: puhelujen mahdollistamiseksi 16 I/O-kortin vastaava tulo on suljettava. Tyyppi 2: COP-puheluiden mahdollistaminen: puheluiden mahdollistamiseksi 16 I/O-kortin vastaava tulo on suljettava Tyyppi 3: COP + LOP-puheluiden mahdollistaminen: puheluiden mahdollistamiseksi 16 I/O-kortin vastaava tulo on suljettava (kerroksen poiskytkentä) | |
| Akselin suojaus | Aktivoi akselin pääsyn suojauspiirin (EN81-20) | |
| Integroitu kuorman punnitus | Ota käyttöön sisäänrakennettu kuorman punnitustoiminto. Vaatii kalibrointimenettelyn (testi 22). |
Sijainti-valikko
– Enkooderilla –
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| Paikannusjärjestelmä | Paikannusjärjestelmän tyyppi: enkooderilla tai perinteinen. Huomautus: Voidaan muokata vain väliaikaisessa toimintatilassa. | |
| Automaattinen asetus | Lattian asennon itseoppimisprosessin aloitus. Voidaan muokata vain väliaikaisessa käyttötilassa. | |
| Lattian sijainti | Kunkin kerroksen sijaintiarvo | |
| Kiihtyvyys. Aika | Kiihtyvyysaika. Aika, joka tarvitaan lähtönopeudesta ajonopeuteen siirtymiseen. | |
| Käynnistysapua | Käynnistysnopeus | |
| Boostin pysäyttäminen | Lopullinen (pysähtymis)nopeus | |
| Maksiminopeus | Matkustuksen aikana saavutettava suurin nopeus | |
| Tarkastusnopeus | Tarkastustilan ajonopeus | |
| AGB/AGH-nopeus | Matkanopeus AGB/AGH-raja-pisteissä. Sama nopeus kuin hätätilanteissa. | |
| Viive Dir.-BRK | VVVF: Viive kulkusuunnan aktivoinnin ja BRK-komennon (käynnistys) välillä OLEO: Tähti/kolmio-viive | |
| Viive BRK-S | Viive BRK-komennon aktivoinnin ja analogisen nopeuden nousun alkamisen välillä | |
| Viive BRK-Dir. | Viive ajokäskyn deaktivoinnin ja kulkusuunnan deaktivoinnin välillä (pysähdys kerroksessa) | |
| Hätätilanne BRK PÄÄLLÄ | Hätäjarrutuksen modulaatioparametri | |
| Hätätilanne BRK POIS | Hätäjarrutuksen modulaatioparametri | |
| Monitorikooderi | Sisältää tietoja seuraavista aiheista: Enkooderin ominaisuudet, hidastumiskorkeuksien lukeminen (R1D / R1S), uudelleen tasaus (RRIPD / RRIPS) ja hissikopion pysäyttäminen (RLD / RLS), jossa D tarkoittaa alas ja S ylös; lopuksi se sisältää tietoja AGB / AGH- ja ZP-korkeuksien lukemisesta. Huomautus: R1D- ja R1S-korkeuksia voidaan muuttaa painamalla Enter-näppäintä ilman, että itseoppimisprosessia tarvitsee toistaa (jotta hidastumismatka olisi sama nousussa ja laskeutumisessa). | |
| ZP pituus |
– Magneettisilla lukijoilla –
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| Paikannusjärjestelmä | Paikannusjärjestelmän tyyppi: enkooderilla tai perinteinen. Voidaan muokata vain väliaikaisessa toimintatilassa Huomautus: jos kyseessä on absoluutti-enkooderi ja akselin pituus on yli 65 metriä, muuta enkooderin resoluutiota = 2 automaattisen asetuksen valikossa ennen manuaalisen opetusmenettelyn aloittamista. | |
| Yläosa PV | Hidastuksen sijainti (matalan nopeuden kulku) ja sisäänkäyntien lukumäärä | |
| PV kerroksissa | Kunkin kerroksen erityisen hidastuvuuden sijainti | |
| Lyhyt tason viive | Aika ennen lyhyen tason hidastumista (vain jos lyhyt taso on ohjelmoitu) | |
| Viive Top PV 2 | Viive ennen siirtymistä välivauhtiin | |
| Viive Dir.-BRK | VVVF: Viive kulkusuunnan aktivoinnin ja ajokomennon (BRK) välillä OLEO: Tähti/kolmio-viive | |
| Viive BRK-S | BRK-komennon aktivoinnin ja nopeuskomennon välinen viive | |
| Viive BRK-Dir. | Viive ajokäskyn deaktivoinnin ja ajosuunnan deaktivoinnin välillä (saapuminen kerrokseen) | |
| Tarkastusnopeus | Asettaa tarkastuksen nopeuden | |
| Hätätilanne BRK päällä | Hätäjarrutuksen modulaatioparametri (muokkaa vain, jos EME-korttia ei ole) | |
| Hätätilanne BRK pois päältä | Hätäjarrutuksen modulaatioparametri (muokkaa vain, jos EME-korttia ei ole) |
VVVF-perusvalikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| F03 | Suurin nopeus | Moottorin suurin nopeus |
| F05 | Nimellisjännite | Invertterin ohjaaman moottorin nimellisjännite |
| F07 | Acc T1 | Kiihtyvyysramppi (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| F08 | Joulukuu T2 | Kiihtyvyysramppi (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| F42 | Ohjaustila | Ohjaustila |
| E12 | Kiihtyvyys/hidastuvuus Aika 5 | |
| E13 | Kiihtyvyys/hidastuvuus Aika 6 | |
| E15 | Kiihtyvyys/hidastuvuus Aika 8 | |
| E16 | Kiihtyvyys/hidastuvuus Aika 9 | |
| C07 | Liukunopeus | Hiipimisnopeus (vain FAI/FAS-paikannusjärjestelmällä) |
| C10 | Keskivauhti | Järjestelmän nopeus tarkastustilassa (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| C11 | Suuri nopeus | Suuri nopeus monivaiheiseen nopeuden muutokseen (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| P01 | Moottorin navat | Moottorin napojen lukumäärä |
| P02 | Moottorin nimelliskapasiteetti | Moottorin nimellisteho |
| P03 | Moottorin nimellisvirta | Moottorin nimellisvirta |
| P04 | Moottorin automaattinen viritys | Moottorin parametrien automaattinen säätö (vain vaihdevetoiset moottorit) |
| P06 | M-kuormittamaton virta. | Moottorin tyhjäkäyntivirta |
| P12 | M-luokitus Slip | Moottorin nimellisliukutaajuus |
| L01 | PG valitse | |
| L02 | PG-resoluutio | Pulssikooderin resoluutio (pulssi/kierros) |
| L19 | S-käyrä 1 | S-käyrä – 1 |
| L24 | S-käyrä 6 | S-käyrä – 6 |
| L25 | S-käyrä 7 | S-käyrä – 7 |
| L26 | S-käyrä 8 | S-käyrä – 8 |
| L27 | S-käyrä 9 | S-käyrä – 9 |
| L82 | Jarrujen viive | Viive BRKS-lähdön aktivoinnista |
| L83 | Jarrujen irtoamisen viive | Viive BRKS-ulostulon deaktivoinnista |
VVVF-lisävalikko
| Koodi | Parametrin nimi | Parametrin kuvaus |
|---|---|---|
| F01 | Nopeuden säätö | Nopeuden vaihtelun komentojen valinta |
| F03 | Suurin nopeus | Moottorin suurin nopeus |
| F04 | Nimellisnopeus | Moottorin nimellisnopeus (taajuus) |
| F05 | Nimellisjännite | Invertterin ohjaaman moottorin nimellisjännite |
| F07 | Acc T1 | Kiihtyvyysramppi (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| F08 | Joulukuu T2 | Kiihtyvyysramppi (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| F09 | TRQ-tehostus | Vääntömomentin kasvu |
| F10 | Sähköinen OL | Ylikuormituksen sähköinen suojaus |
| F11 | Ylikuormitustaso | Moottorin elektroninen ylikuormitussuoja (arvo ampeereina vastaa invertterin kokoa) |
| F12 | Ylikuormitusaika | Termisen ajan vakio |
| F20 | DC-jarru nopeus | DC-INJECTION-taajuuden kynnysarvo |
| F21 | DC-jarrujen taso | DC-INJEKTION intensiteettikynnys |
| F22 | DC-jarru T | DC-INJEKTIOAIKA |
| F23 | Käynnistysnopeus | Taajuusmuuttajan käynnistysnopeus (Hz) |
| F24 | Pidätysaika | Invertterin käynnistysnopeudella kulkeutumisen kestoaika |
| F25 | Pysähtymisnopeus | Taajuusmuuttajan pysäytysnopeus (Hz) |
| F26 | Moottorin ääni | Kantoaallon taajuus |
| F42 | Ohjaustila | Ohjaustila |
| F44 | Virranrajoitin | Virranrajoittimen aktivointitaso. % invertterin nimellisvirrasta. Jos ”Auto”, arvo tarkoittaa, että virtaa ei rajoiteta. |
| E04 | Komento X4 | Tulo X4 ei käytössä |
| E05 | Komento X5 | Tulo X5 ei käytössä |
| E06 | Komento X6 | Tulo X6 ei käytössä |
| E07 | Komento X7 | Tulo X7 ei käytössä |
| E08 | Komento X8 | Tulo X8 ei käytössä |
| E10 | Kiihtyvyys/hidastuvuus Aika 3 | |
| E11 | Kiihtyvyys/hidastuvuus Aika 4 | |
| E12 | Kiihtyvyys/hidastuvuus Aika 5 | |
| E13 | Kiihtyvyys/hidastuvuus Aika 6 | |
| E14 | Kiihtyvyys/hidastuvuus Aika 7 | |
| E15 | Kiihtyvyys/hidastuvuus Aika 8 | |
| E16 | Kiihtyvyys/hidastuvuus Aika 9 | |
| E20 | Signaali Y1 | Lähtö Y1 (transistori) ei käytössä |
| E21 | Signaali Y2 | Lähtö Y2 (transistori) ei käytössä |
| E22 | Signaali Y3 | Lähtö Y3 (transistori) ei käytössä |
| E23 | Signaali Y4 | Lähtö Y4 (transistori) ei käytössä |
| E30 | Nopeus Arr. Hyst | Ei käytetty |
| E31 | Nopeuden tunnistin | Ei käytetty |
| E32 | Nopeus Det Hyst | Ei käytetty |
| E39 | RRD-taso | Suositeltava suunta hätätilanteessa (Ei käytetä) |
| E61 | Analoginen tulo 12 | Analogisen tulon 12 toiminta |
| E98 | Komento FWD | Ruuviliittimen FWD toiminto |
| E99 | Komento REV | Ruuviliittimen REV-toiminto |
| C01 | BATRY TL i | ”Vääntömomentin rajoitus hätätilanteessa. Jos ”OFF”, arvo tarkoittaa, että virtaa ei rajoiteta.” |
| C02 | BATRY TL t | |
| C03 | Akun nopeus | Nopeus hätäkäytössä |
| C07 | Liukunopeus | Hiipimisnopeus (vain FAI/FAS-paikannusjärjestelmällä) |
| C10 | Keskivauhti | Järjestelmän nopeus tarkastustilassa (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| C11 | Suuri nopeus | Suuri nopeus monivaiheiseen nopeuden muutokseen (vain FAI/FAS-paikannusjärjestelmän kanssa) |
| P01 | Moottorin navat | Moottorin napojen lukumäärä |
| P02 | Moottorin nimelliskapasiteetti | Moottorin nimellisteho |
| P03 | Moottorin nimellisvirta | Moottorin nimellisvirta |
| P04 | Moottorin automaattinen viritys | Moottorin parametrien automaattinen säätö (vain vaihdevetoiset moottorit) |
| P06 | M-kuormittamaton virta. | Moottorin tyhjäkäyntivirta |
| P07 | M-%R1 | Moottori (%R1) |
| P08 | M-%X | Moottori (%X) |
| P09 | M-Slip-ajaminen | Liukukompensaatio, prosenttiosuus nimellisestä liukusta (P12) vetävillä puolilla |
| P10 | M-Slip-jarrutus | Liukukompensaatiohyöty prosentteina nimellislisäyksestä (P12) jarrutuspuolella |
| P11 | M-Slip T | Liukukompensaatioajan arvo (kiinteä) |
| P12 | M-luokitus Slip | Moottorin nimellisliukutaajuus |
| P60 | Ankkurivastus – Rs | |
| P62 | Ankkurin q-akselin reaktanssi – Xs | |
| P63 | Interfaasi-induktiivinen jännite – E | |
| P65 | q-akselin induktanssin magneettisen saturaation korjaus | |
| H04 | Automaattinen nollausajat | Automaattinen nollaus (kertojen määrä) |
| H05 | Automaattinen nollaus int | Automaattinen nollaus (nollausväli) |
| H06 | Jäähdytyspuhallin CTRL | ”Jäähdytyspuhaltimen sammumisen viive (Auto-arvo tarkoittaa, että puhaltimen ohjauksella ei ole rajoituksia; puhallin on aina päällä).” |
| H56 | ||
| H57 | S-käyrä 11 | Kaarre S-11:een |
| H58 | S-käyrä 12 | Kaarre S-12:een |
| H64 | Nolla odotusaika | |
| H65 | Pehmeä käynnistysaika | |
| H67 | Pysäytysaika | |
| H96 | Jarrujen valvonta | Ota jarrujen valvonta käyttöön |
| H190 | Moottorin UVW-järjestys | Moottorin sammutusvaiheet |
| L01 | PG valitse | |
| L02 | PG-resoluutio | Pulssikooderin resoluutio (pulssi/kierros) |
| L03 | P.P.Tuning | |
| L04 | P.P.Offset | Magneettisen napaposition siirtymä (siirtymäkulma) vaihteettomille käyttölaitteille |
| L05 | ACR P-vahvistus | |
| L07 | Automaattinen pylvään virityksen valinta | |
| L19 | S-käyrä 1 | S-käyrä – 1 |
| L20 | S-käyrä 2 | S-käyrä – 2 |
| L21 | S-käyrä 3 | S-käyrä – 3 |
| L22 | S-käyrä 4 | S-käyrä – 4 |
| L23 | S-käyrä 5 | S-käyrä – 5 |
| L24 | S-käyrä 6 | S-käyrä – 6 |
| L25 | S-käyrä 7 | S-käyrä – 7 |
| L26 | S-käyrä 8 | S-käyrä – 8 |
| L27 | S-käyrä 9 | S-käyrä – 9 |
| L28 | S-käyrä 10 | |
| L29 | SFO Hold T | ”Lyhyt lattiatoiminto (pidätysaika) Käytetään vain FAI-FAS-paikannustilassa” |
| L30 | SFO-nopeus | Lyhyt lattian käyttö (sallittu nopeus) – EI KÄYTETÄ |
| L36 | ASR P-vahvistus korkea | |
| L37 | ASR I -vahvistus korkea | |
| L38 | ASR P-vahvistus alhainen | |
| L39 | ASR I Gain Low | |
| L40 | Kytkimen nopeus 1 | Ei käytetty |
| L41 | Kytkimen nopeus 2 | Ei käytetty |
| L42 | ASR-FF-vahvistus | |
| L55 | TB Aloitusaika | |
| L56 | TB Loppuaika | |
| L64 | TB Digital 3 | |
| L65 | ULC-toiminta | Epätasapainoisen kuorman kompensointi |
| L66 | ULC-aktivointi | Epätasapainoisen kuorman kompensointi (aktivointiaika) |
| L68 | ULC ASR P-voitto | |
| L69 | ULC ASR I -vahvistus | |
| L73 | APR P-voitto nolla | |
| L74 | APR D -voitto | |
| L75 | Suodatusaika | |
| L76 | ACR P vakio | |
| L80 | Jarru-tila | Jarrujen ohjaus (BRKS) -lähtötila |
| L81 | Jarru tasolla | Lähtövirta, joka kytkee BRKS-signaalin päälle, kun L80 = 2. |
| L82 | Jarrujen viive | Viive BRKS-lähdön aktivoinnista |
| L83 | Jarrujen irtoamisen viive | Viive BRKS-ulostulon deaktivoinnista |
| L84 | BRKS-tarkistus t | Sallittu aika BRKS-lähdön ja BRKE-tulon välillä (Er6) |
| L99 | TOIMINTA SEL | Ei käytetty |
| L122 | Del. Op. Syöttöteho Det. Taso | |
| L124 | Del. Op. Dir. Lask. Viiveajastin | |
| L130 | Sheave-halkaisija (Ds) | |
| L131 | Enkooderin halkaisija (De) | |
| L132 | Theta-kompensointikaista | |
| L133 | Theta-kompensaatiovahvistuksen alaraja | |
| L134 | Vastareaktioaika | ”Takaiskujen aika (kun L65 = 2)” |
| L198 | Käyttöasetuskytkin 1 | BIT0 = Kantotaajuus voidaan asettaa kiinteäksi 16 kHz:ksi koko nopeusalueella ajomelun vähentämiseksi. |
| L199 | Käyttöasetuskytkin 2 | Varattu |