
1) Sæt liften i INSPEKTION-tilstand

2) Kontrol af motorparametre
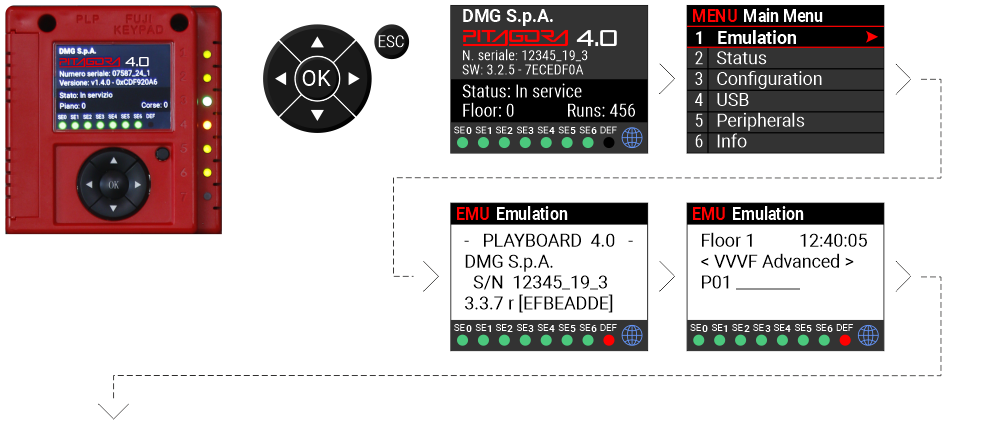
Gå til menuen Emulering fra hovedmenuen.
Hovedmenu > Emulering > VVVF Avanceret
GEARED motorer
Parametre, der normalt er forudindstillet, hvis de er angivet ved bestillingen.
| VVVF Fuji-parameter | Beskrivelse | Bemærk |
|---|---|---|
| P01 – Motorpoler | Indtast antallet af motorpoler | |
| F03 – Maksimal hastighed | Indtast motorens maksimale hastighed (omdrejninger pr. minut) | |
| F04 – Nominel hastighed | Indtast motorens nominelle hastighed (Hz) | |
| F05 – Nominel spænding | Indtast motorens nominelle spænding | |
| P03 – Motorens nominelle strøm | Indtast maskinens nominelle strømstyrke | |
| P02 – Motorens nominelle kapacitet | Indtast maskinens nominelle effekt | |
| C11 – Høj hastighed | Indstil høj hastighed C11 (værdi angivet på motorens typeskilt) | Kun med magnetiske sensorer -tællesystem (FAI / FAS) |
| C10 – Mellemhastighed | Indstil inspektion/mellemhastighed C10 | som ovenfor |
| C07 – Krybehastighed | Indstil lav hastighed C07 (typisk 10 % af C11) | som ovenfor |
| L01 – PG-valg | Indstil motorkodertypen | Kun lukkede kredsløbssystemer |
| L02 – PG-opløsning | Indstil motorens encoderopløsning (typisk 1024) | som ovenfor |
| P04 – Motorens autotuning 3 = Åben sløjfe 2 = Lukket sløjfe 1= Motorer med ukendte data |
GEARLØSE motorer
Parametre, der normalt er forudindstillet, hvis de er angivet ved bestillingen.
| VVVF Fuji-parameter | Beskrivelse | Bemærk |
|---|---|---|
| P01 – Motorpoler | Indtast antallet af motorpoler | |
| F03 – Maksimal hastighed | Indtast motorens maksimale hastighed (omdrejninger pr. minut) | |
| F04 – Nominel hastighed | Indtast motorens nominelle hastighed (Hz) | |
| F05 – Nominel spænding | Indtast motorens nominelle spænding | |
| P08 – M-%X | Indstil værdien "10 %" | Bekræft den foreslåede værdi |
| P07 – M-%R1 | Indstil værdien "5 %" | som ovenfor |
| P06 – M-tomgangsstrøm. | Indstil værdien "0 Ampere" | som ovenfor |
| P03 – Motorens nominelle strøm | Indtast maskinens nominelle strømstyrke | |
| P02 – Motorens nominelle kapacitet | Indtast maskinens nominelle effekt | |
| C11 – Høj hastighed | Indstil høj hastighed C11 (værdi angivet på motorens typeskilt) | Kun med magnetiske sensorer -tællesystem (FAI / FAS) |
| C10 – Mellemhastighed | Indstil inspektion/mellemhastighed C10 | som ovenfor |
| C07 – Krybehastighed | Indstil lav hastighed C07 (typisk 10 % af C11) | som ovenfor |
| L01 – PG-valg | Indstil motorkodertypen | Kun lukkede kredsløbssystemer |
| L02 – PG-opløsning | Indstil motorens encoderopløsning (typisk 1024) | som ovenfor |
| L03 – P.P.-indstilling 4 = Statisk tuning (afhængigt af motortype 5 = Dynamisk tuning (uden reb) |
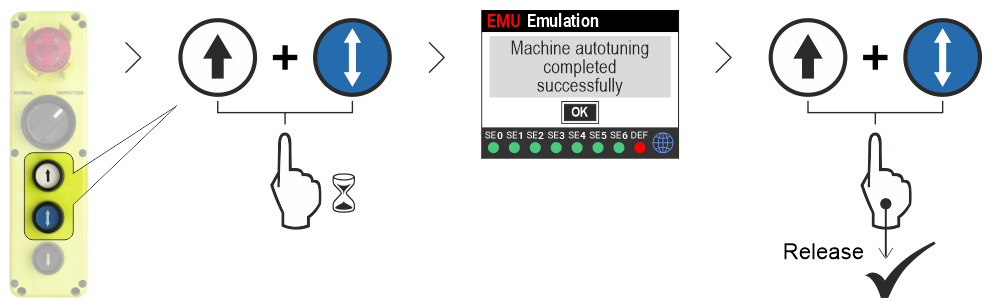
3) Afslutning af selvstudiefasen
Fejlfinding ved polindstilling
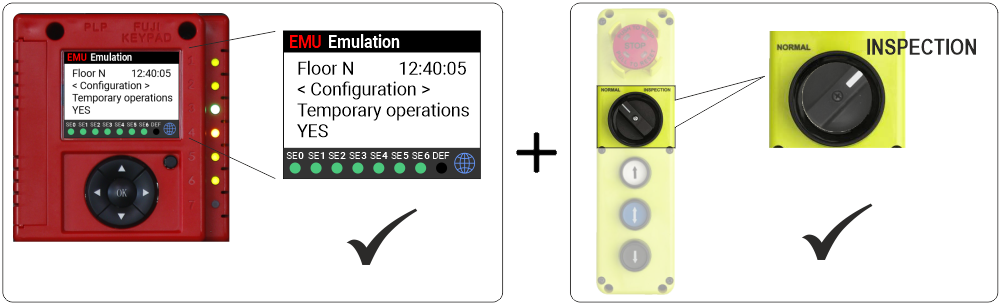
Kontroller, at elevatoren er i midlertidig drift.
Hovedmenu > Emulering > Konfiguration > Midlertidige handlinger > JA
Prøv at flytte kabinen manuelt OP/NED.
Hvis liften ikke reagerer korrekt, skal du følge nedenstående instruktioner.
Ændr H190-værdien fra 1 til 0
| Fejl -kode | Typiske VVVF-fejl efter mislykket autotuning (Menu -> VVVF Advanced) |
|---|---|
| 52 – OS | Overspeed |
| 52 – ErE | Hastighedsforskel (hastighedsafvigelse) |
| 52 – OI1 | Motoroverbelastning |
| 52 – OLU | Overbelastning af inverter |
| 52 – Oc1 | Overstrøm under acceleration |
| 52 – Oc2 | Overstrøm under deceleration |
| 52 – Oc3 | Overstrøm ved konstant hastighed |

Udfør følgende kontroller

Problem løst
Byt værdier for parametrene E98 – E99
Problem løst
- Kontroller, at L80=1 og L82=0,2.
- Kontroller bremsernes ledningsføring
- Kontroller bremsespændingen
Først "ENABLE" (aktiver), derefter "FORWARD" (fremad)
eller "REVERSE" (bak) (afhængigt af retningen)
- Kontroller farve og rækkefølge af encoder-ledningsføring
- Tilslut kabelafskærmningen til kortets "CM"-terminal.