
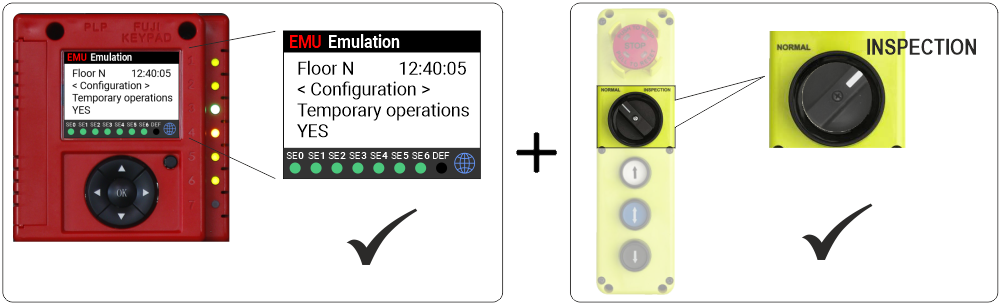
1) Zet de lift in de INSPECTIE-modus.

2) Controle van de motorparameters
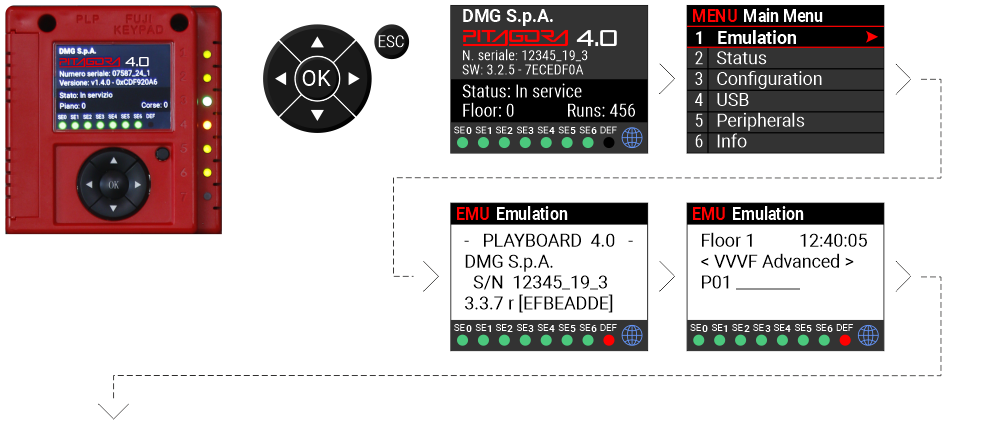
Ga vanuit het hoofdmenu naar het menu Emulatie.
Hoofdmenu > Emulatie > VVVF Geavanceerd
AANGEDREVEN motoren
Parameters worden normaal gesproken vooraf ingesteld indien opgegeven bij bestelling.
| VVVF Fuji-parameter | Beschrijving | Opmerking |
|---|---|---|
| P01 – Motorpolen | Voer het aantal motorpolen in | |
| F03 – Maximale snelheid | Voer het maximale toerental (RPM) van de motor in. | |
| F04 – Nominale snelheid | Voer het nominale motortoerental (Hz) in. | |
| F05 – Nominale spanning | Voer de nominale motorspanning in | |
| P03 – Motor nominaal vermogen | Voer de nominale stroomsterkte van de machine in. | |
| P02 – Motor nominaal vermogen | Voer het nominaal vermogen van de machine in | |
| C11 – Hoge snelheid | Stel hoge snelheid C11 in (waarde vermeld op het typeplaatje van de motor) | Alleen met magnetische sensoren -telsysteem (FAI / FAS) |
| C10 – Gemiddelde snelheid | Inspectie/tussentijdse snelheid instellen C10 | zoals hierboven |
| C07 – Kruipsnelheid | Stel lage snelheid C07 in (normaal gesproken 10% van C11) | zoals hierboven |
| L01 – PG selecteren | Stel het type motorencoder in | Alleen gesloten systemen |
| L02 – PG-resolutie | Stel de resolutie van de motorencoder in (meestal 1024). | zoals hierboven |
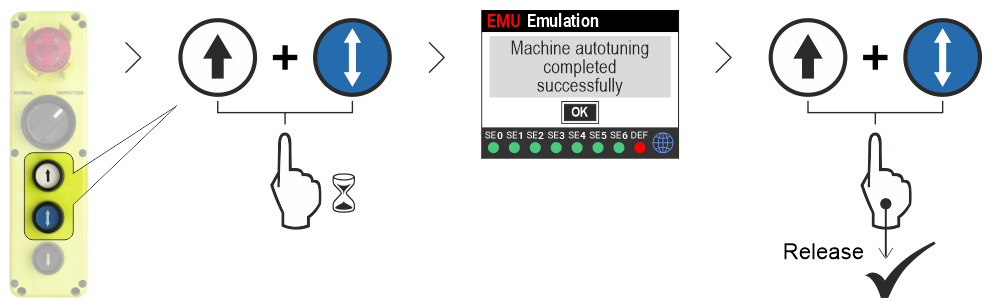
| P04 – Motor autotuning 3 = Open lus 2 = Gesloten lus 1= Motoren met onbekende gegevens |
GEARLESS-motoren
Parameters worden normaal gesproken vooraf ingesteld indien opgegeven bij bestelling.
| VVVF Fuji-parameter | Beschrijving | Opmerking |
|---|---|---|
| P01 – Motorpolen | Voer het aantal motorpolen in | |
| F03 – Maximale snelheid | Voer het maximale toerental (RPM) van de motor in. | |
| F04 – Nominale snelheid | Voer het nominale motortoerental (Hz) in. | |
| F05 – Nominale spanning | Voer de nominale motorspanning in | |
| P08 – M-%X | Stel de waarde in op "10%" | Bevestig de voorgestelde waarde |
| P07 – M-%R1 | Stel de waarde in op "5%" | zoals hierboven |
| P06 – M-Stroom zonder belasting. | Stel de waarde in op "0 Ampère" | zoals hierboven |
| P03 – Motor nominaal vermogen | Voer de nominale stroomsterkte van de machine in. | |
| P02 – Motor nominaal vermogen | Voer het nominaal vermogen van de machine in | |
| C11 – Hoge snelheid | Stel hoge snelheid C11 in (waarde vermeld op het typeplaatje van de motor) | Alleen met magnetische sensoren -telsysteem (FAI / FAS) |
| C10 – Gemiddelde snelheid | Inspectie/tussentijdse snelheid instellen C10 | zoals hierboven |
| C07 – Kruipsnelheid | Stel lage snelheid C07 in (normaal gesproken 10% van C11) | zoals hierboven |
| L01 – PG selecteren | Stel het type motorencoder in | Alleen gesloten systemen |
| L02 – PG-resolutie | Stel de resolutie van de motorencoder in (meestal 1024). | zoals hierboven |
| L03 – P.P. Afstemming 4 = Statische afstemming (afhankelijk van het motortype 5 = Dynamische afstemming (zonder kabels) |
3) Afsluiting van de zelfstudiefase
Problemen met het afstemmen van de paal oplossen
Controleer of de lift in tijdelijke bedrijf is.
Hoofdmenu > Emulatie > Configuratie > Tijdelijke bewerkingen > JA
Probeer de cabine handmatig omhoog/omlaag te bewegen.
Als de lift niet reageert, volg dan de onderstaande instructies.
Wijzig de waarde van H190 van 1 naar 0.
| Fout code | Typische VVVF-fouten na mislukte automatische afstemming (Menu -> VVVF Advanced) |
|---|---|
| 52 – Besturingssysteem | Te hoge snelheid |
| 52 – ErE | Snelheidsverschil (te grote snelheidsafwijking) |
| 52 – OI1 | Motor overbelasting |
| 52 – OLU | Overbelasting van de omvormer |
| 52 – Oc1 | Overstroom tijdens acceleratie |
| 52 – Oc2 | Overstroom tijdens vertraging |
| 52 – Oc3 | Overstroom bij constante snelheid |

Voer de volgende controles uit

Probleem opgelost
Wissel de waarden van parameters E98 – E99 om.
Probleem opgelost
- Controleer of L80=1 en L82=0,2.
- Controleer de bedrading van de remmen
- Controleer de remspanning
Eerst "ENABLE" (inschakelen), dan "FORWARD" (vooruit)
of "REVERSE" (achteruit) (afhankelijk van de richting)
- Controleer de kleur en volgorde van de bedrading van de encoder.
- Sluit de kabelafscherming aan op de "CM"-aansluiting van de printplaat.