
1) Mettere l'impianto in modalità ISPEZIONE

2) Controllo dei parametri del motore
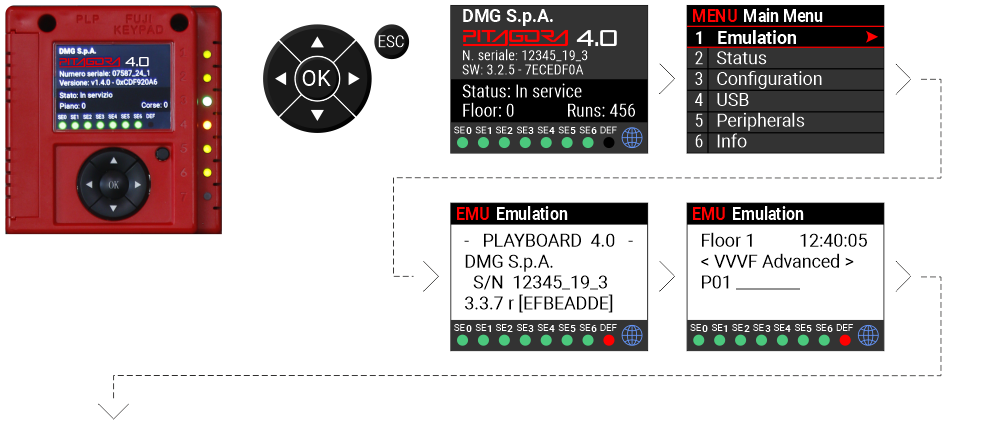
Dal menu principale, accedere al menu Emulazione.
Menu principale > Emulazione > VVVF avanzato
Motori GEARED
Parametri normalmente preimpostati se specificati al momento dell'ordine.
| Parametro VVVF Fuji | Descrizione | Nota |
|---|---|---|
| P01 - Poli del motore | Inserire il numero di poli del motore | |
| F03 - Velocità massima | Inserire la velocità massima del motore (RPM) | |
| F04 – Rated Speed | Inserire la velocità nominale del motore (Hz) | |
| F05 – Rated Voltage | Inserire la tensione nominale del motore | |
| P03 – Motor Rated Cur | Inserire l'intensità di corrente nominale della macchina | |
| P02 – Motor Rated Cap | Inserire la potenza nominale della macchina | |
| C11 - Alta velocità | Impostare l'alta velocità C11 (valore specificato sulla targhetta del motore) | Solo con sensori magnetici sistema di conteggio (FAI / FAS) |
| C10 - Velocità media | Impostazione ispezione/velocità intermedia C10 | come sopra |
| C07 - Velocità di scorrimento | Impostare la bassa velocità C07 (tipicamente il 10% di C11) | come sopra |
| L01 – PG select | Impostare il tipo di encoder del motore | Solo sistemi ad anello chiuso |
| L02 – PG resolution | Impostare la risoluzione dell'encoder del motore (in genere 1024) | come sopra |
| P04 - Autotuning motore 3 = Anello aperto 2 = Anello chiuso 1= Motori con dati sconosciuti |
Motori GEARLESS
Parametri normalmente preimpostati se specificati al momento dell'ordine.
| Parametro VVVF Fuji | Descrizione | Nota |
|---|---|---|
| P01 - Poli del motore | Inserire il numero di poli del motore | |
| F03 - Velocità massima | Inserire la velocità massima del motore (RPM) | |
| F04 – Rated Speed | Inserire la velocità nominale del motore (Hz) | |
| F05 – Rated Voltage | Inserire la tensione nominale del motore | |
| P08 - M-%X | Impostare il valore "10%". | Confermare il valore proposto |
| P07 - M-%R1 | Impostare il valore "5%". | come sopra |
| P06 – M-No-load Curr. | Impostare il valore "0 Ampere". | come sopra |
| P03 – Motor Rated Cur | Inserire l'intensità di corrente nominale della macchina | |
| P02 – Motor Rated Cap | Inserire la potenza nominale della macchina | |
| C11 - Alta velocità | Impostare l'alta velocità C11 (valore specificato sulla targhetta del motore) | Solo con sensori magnetici sistema di conteggio (FAI / FAS) |
| C10 - Velocità media | Impostazione ispezione/velocità intermedia C10 | come sopra |
| C07 - Velocità di scorrimento | Impostare la bassa velocità C07 (tipicamente il 10% di C11) | come sopra |
| L01 – PG select | Impostare il tipo di encoder del motore | Solo sistemi ad anello chiuso |
| L02 – PG resolution | Impostare la risoluzione dell'encoder del motore (in genere 1024) | come sopra |
| L03 - Pole tuning. 4 = Tuning statico (a seconda del tipo di motore) 5 = Tuning dinamico (libero da funi) |
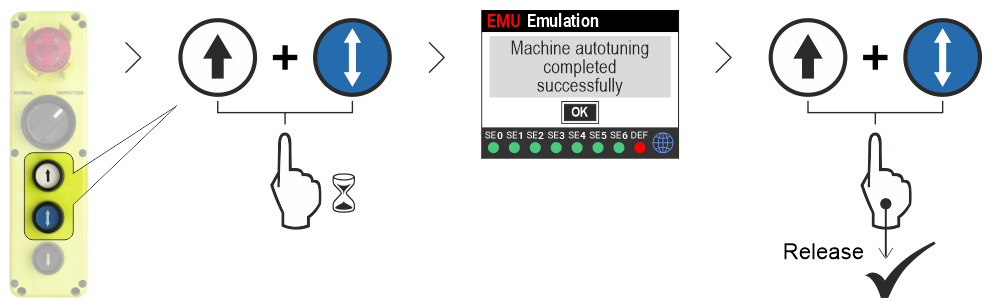
3) Chiusura della fase di autoapprendimento
Risoluzione dei problemi sul Pole tuning
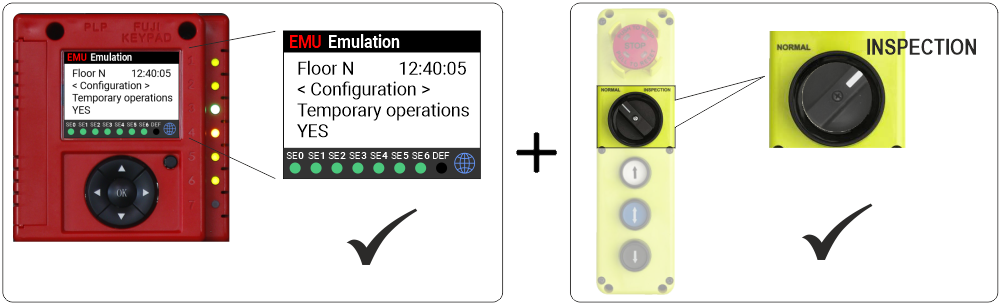
Verificare che l'impianto sia in marcia provvisoria.
Menu principale > Emulazione > Impianto > Marcia provvisoria > SÌ
Provare a spostare manualmente la cabina verso l'alto o il basso.
Se l'ascensore non si muove di conseguenza, seguire le istruzioni riportate di seguito.
Modificare il valore H190 da 1 a 0
| Errore codice | Errori tipici del VVVF dopo un Autotuning fallito (Menu -> VVVF Avanzato) |
|---|---|
| 52 - OS | Errore di sovraccarico |
| 52 - ErE | DIsallineamento tra il valore atteso degli impulsi dell’encoder e quelli reali |
| 52 - OI1 | Sovraccarico del motore |
| 52 - OLU | Sovraccarico dell'inverter |
| 52 - Oc1 | Sovracorrente in accelerazione |
| 52 - Oc2 | Sovracorrente in decelerazione |
| 52 - Oc3 | Sovracorrente durante la marcia |

Eseguire i seguenti controlli

Problema risolto
Invertire i valori dei parametri E98 - E99
Problema risolto
- Verificare che L80=1 e L82=0,2
- Controllare il cablaggio dei freni
- Controllare la tensione dei freni
prima "ENABLE", poi "FORWARD"
o "REVERSE" (in base alla direzione)
- Verificare il colore e la sequenza del cablaggio dell'encoder.
- Collegare il cavo schermato al morsetto "CM" della scheda