
1) Ställ hissen i INSPEKTION-läge.

2) Kontroll av motorparametrar
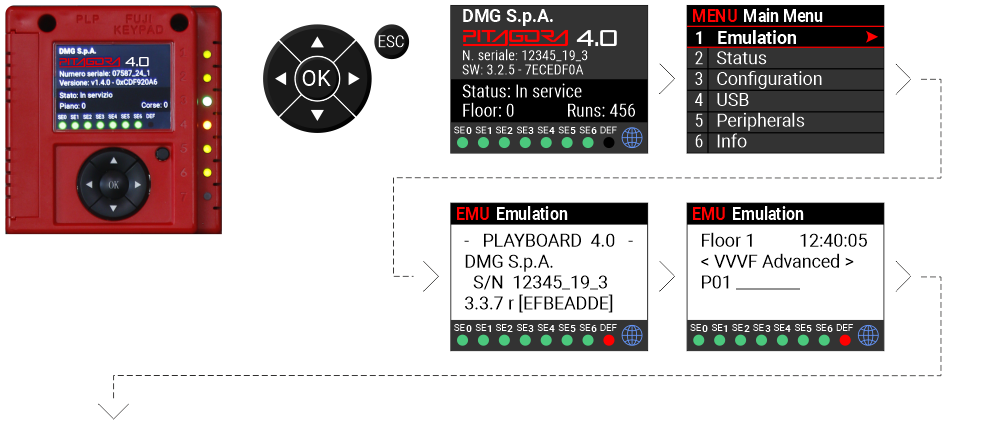
Öppna menyn Emulering från huvudmenyn.
Huvudmeny > Emulering > VVVF Avancerat
GEARED-motorer
Parametrar som normalt är förinställda om de anges vid beställningen.
| VVVF Fuji-parameter | Beskrivning | Anmärkning |
|---|---|---|
| P01 – Motorpoler | Ange antalet motorpoler | |
| F03 – Maximal hastighet | Ange maximal motorhastighet (varv/min) | |
| F04 – Nominell hastighet | Ange motorns nominella varvtal (Hz) | |
| F05 – Märkspänning | Ange motorens märkspänning | |
| P03 – Motorens märkström | Ange maskinens nominella strömstyrka | |
| P02 – Motorens nominella kapacitet | Ange maskinens nominella effekt | |
| C11 – Hög hastighet | Ställ in hög hastighet C11 (värde angivet på motorns typskylt) | Endast med magnetiska sensorer -räknarsystem (FAI/FAS) |
| C10 – Medelhög hastighet | Inställning av inspektion/mellanhastighet C10 | som ovan |
| C07 – Kryphastighet | Ställ in låg hastighet C07 (vanligtvis 10 % av C11) | som ovan |
| L01 – PG-val | Ställ in motorkodartyp | Endast slutna system |
| L02 – PG-upplösning | Ställ in motorens kodarupplösning (vanligtvis 1024) | som ovan |
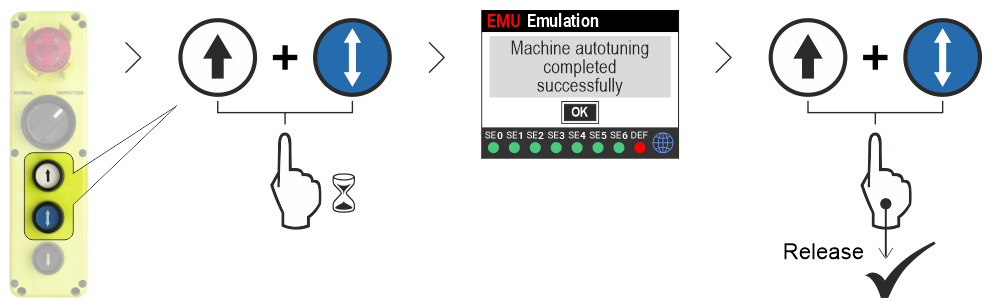
| P04 – Motorens autotuning 3 = Öppen slinga 2 = Sluten slinga 1= Motorer med okända data |
GEARLESS-motorer
Parametrar som normalt är förinställda om de anges vid beställningen.
| VVVF Fuji-parameter | Beskrivning | Anmärkning |
|---|---|---|
| P01 – Motorpoler | Ange antalet motorpoler | |
| F03 – Maximal hastighet | Ange maximal motorhastighet (varv/min) | |
| F04 – Nominell hastighet | Ange motorns nominella varvtal (Hz) | |
| F05 – Märkspänning | Ange motorens märkspänning | |
| P08 – M-%X | Ställ in värdet ”10 %” | Bekräfta det föreslagna värdet |
| P07 – M-%R1 | Ställ in värdet ”5 %” | som ovan |
| P06 – M-ström utan belastning. | Ställ in värdet ”0 ampere” | som ovan |
| P03 – Motorens märkström | Ange maskinens nominella strömstyrka | |
| P02 – Motorens nominella kapacitet | Ange maskinens nominella effekt | |
| C11 – Hög hastighet | Ställ in hög hastighet C11 (värde angivet på motorns typskylt) | Endast med magnetiska sensorer -räknarsystem (FAI/FAS) |
| C10 – Medelhög hastighet | Inställning av inspektion/mellanhastighet C10 | som ovan |
| C07 – Kryphastighet | Ställ in låg hastighet C07 (vanligtvis 10 % av C11) | som ovan |
| L01 – PG-val | Ställ in motorkodartyp | Endast slutna system |
| L02 – PG-upplösning | Ställ in motorens kodarupplösning (vanligtvis 1024) | som ovan |
| L03 – P.P.-inställning 4 = Statisk inställning (beroende på motortyp 5 = Dynamisk inställning (utan rep) |
3) Avslutning av självstudiefasen
Felsökning vid inställning av stången
Kontrollera att hissen är i tillfälligt driftläge.
Huvudmeny > Emulering > Konfiguration > Tillfälliga åtgärder > JA
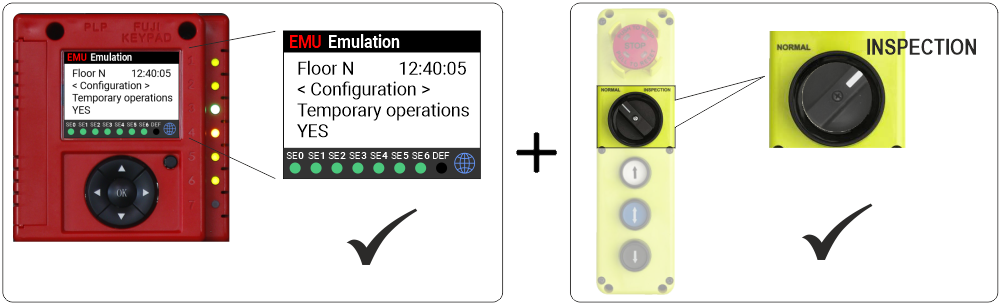
Försök att flytta hytten manuellt uppåt/nedåt.
Om hissen inte reagerar som förväntat, följ instruktionerna nedan.
Ändra värdet H190 från 1 till 0
| Fel -kod | Typiska VVVF-fel efter misslyckad autotuning (Meny -> VVVF Advanced) |
|---|---|
| 52 – OS | Överhastighet |
| 52 – ErE | Hastighetsavvikelse (för hög hastighet) |
| 52 – OI1 | Motoröverbelastning |
| 52 – OLU | Överbelastning av växelriktare |
| 52 – Oc1 | Överström under acceleration |
| 52 – Oc2 | Överström under retardation |
| 52 – Oc3 | Överström vid konstant hastighet |

Utför följande kontroller

Problemet löst
Byt värden för parametrarna E98 – E99
Problemet löst
- Kontrollera att L80=1 och L82=0,2.
- Kontrollera bromsarnas kabeldragning
- Kontrollera bromsspänningen
Först ”ENABLE”, sedan ”FORWARD”
eller ”REVERSE” (beroende på riktning)
- Kontrollera färg och sekvens för kodarens kabeldragning
- Anslut kabelskärmen till kortets CM-terminal.