
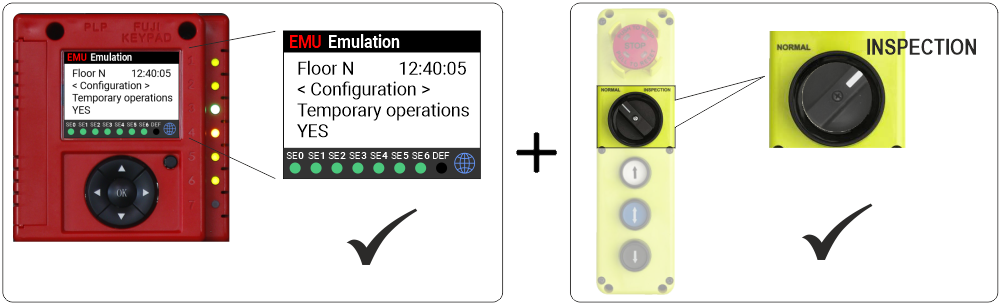
1) Mettre l'ascenseur en mode INSPECTION

2) Vérification des paramètres du moteur
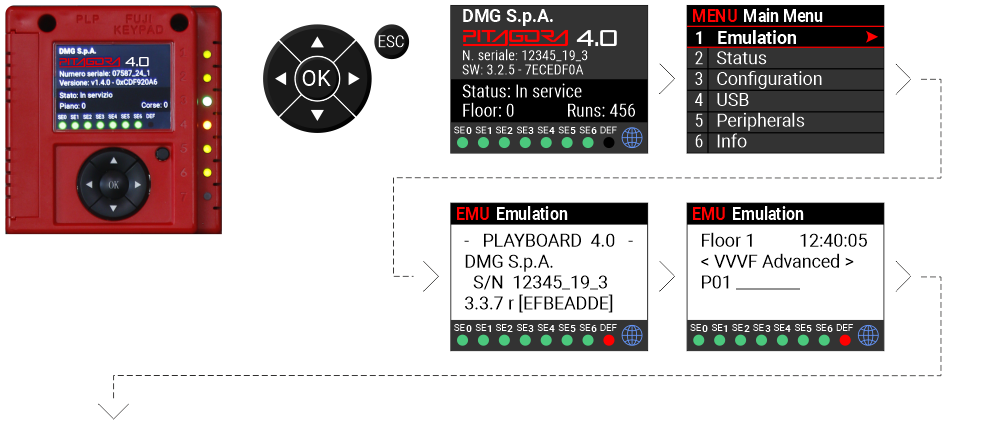
Dans le menu principal, accédez au menu Emulation.
Menu principal > Emulation > VVVF avancé
Moteurs GEARED
Paramètres normalement préréglés si spécifiés lors de la commande.
| VVVF Paramètre Fuji | Description | Note |
|---|---|---|
| P01 – Motor poles | Entrer le nombre de pôles du moteur | |
| F03 – Maximum speed | Entrer la vitesse maximale du moteur (RPM) | |
| F04 – Rated Speed | Entrer la vitesse nominale du moteur (Hz) | |
| F05 – Rated Voltage | Indiquer la tension nominale du moteur | |
| P03 – Motor Rated Cur | Indiquer l'intensité nominale du courant de la machine | |
| P02 – Motor Rated Cap | Indiquer la puissance nominale de la machine | |
| C11 – High speed | Régler la grande vitesse C11 (valeur indiquée sur la plaque signalétique du moteur) | Uniquement avec des capteurs magnétiques Système de comptage (FAI / FAS) |
| C10 – Middle speed | Réglage de la vitesse d'inspection/intermédiaire C10 | comme ci-dessus |
| C07 – Creep speed | Régler la vitesse lente C07 (typiquement 10% de C11) | comme ci-dessus |
| L01 – PG select | Régler le type de codeur du moteur | Systèmes en boucle fermée uniquement |
| L02 – PG resolution | Définir la résolution de l'encodeur du moteur (typiquement 1024) | comme ci-dessus |
| P04 - Autotuning du moteur 3 = Boucle ouverte 2 = Boucle fermée 1= Moteurs avec données inconnues |
moteurs GEARLESS
Paramètres normalement préréglés si spécifiés lors de la commande.
| VVVF Paramètre Fuji | Description | Note |
|---|---|---|
| P01 – Motor poles | Entrer le nombre de pôles du moteur | |
| F03 – Maximum speed | Entrer la vitesse maximale du moteur (RPM) | |
| F04 – Rated Speed | Entrer la vitesse nominale du moteur (Hz) | |
| F05 – Rated Voltage | Indiquer la tension nominale du moteur | |
| P08 - M-%X | Régler la valeur "10%" | Confirmer la valeur proposée |
| P07 - M-%R1 | Régler la valeur "5%" | comme ci-dessus |
| P06 – M-No-load Curr. | Régler la valeur "0 Ampère" | comme ci-dessus |
| P03 – Motor Rated Cur | Indiquer l'intensité nominale du courant de la machine | |
| P02 – Motor Rated Cap | Indiquer la puissance nominale de la machine | |
| C11 – High speed | Régler la grande vitesse C11 (valeur indiquée sur la plaque signalétique du moteur) | Uniquement avec des capteurs magnétiques Système de comptage (FAI / FAS) |
| C10 – Middle speed | Réglage de la vitesse d'inspection/intermédiaire C10 | comme ci-dessus |
| C07 – Creep speed | Régler la vitesse lente C07 (typiquement 10% de C11) | comme ci-dessus |
| L01 – PG select | Régler le type de codeur du moteur | Systèmes en boucle fermée uniquement |
| L02 – PG resolution | Définir la résolution de l'encodeur du moteur (typiquement 1024) | comme ci-dessus |
| L03 - Tuning P.P. 4 = Réglage statique (selon le type de moteur) 5 = Réglage dynamique (sans cordes) |
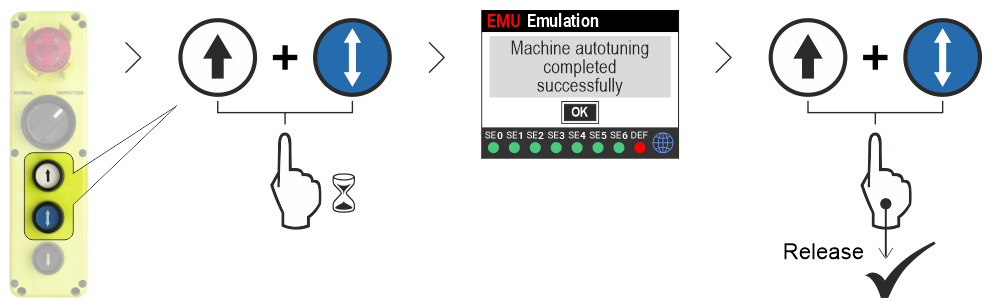
3) Clôture de la phase d'auto-apprentissage
Dépannage de l'accord des pôles
Vérifier que l'ascenseur est en fonctionnement temporaire.
Menu principal > Emulation > Configuration > Marche provisoire > OUI
Essayez de déplacer manuellement la cabine vers le haut ou vers le bas.
Si l'ascenseur ne réagit pas en conséquence, suivez les instructions ci-dessous.
Modifier la valeur H190 de 1 à 0
| Code d'erreur | Erreurs typiques du VVVF après l'échec de l'Autotuning (Menu -> VVVF Advanced) |
|---|---|
| 52 - OS | Survitesse |
| 52 - ErE | Inadéquation entre les impulsions réelles et attendues du codeur du moteur |
| 52 - OI1 | Surcharge du moteur |
| 52 - OLU | Surcharge de l’onduleur |
| 52 - Oc1 | Surintensité pendant l'accélération |
| 52 - Oc2 | Surintensité pendant la décélération |
| 52 - Oc3 | Surintensité en vitesse constante |

Effectuer les contrôles suivants

Problème résolu
Intervertir les valeurs des paramètres E98 - E99
Problème résolu
- Vérifier que L80=1 et L82=0,2
- Vérifier le câblage des freins
- Vérifier la tension des freins
D'abord "ENABLE", puis "FORWARD"
ou "REVERSE" (en fonction de la direction).
- Vérifier la couleur et la séquence du câblage de l'encodeur
- Connecter le blindage du câble au bornier "CM" de la carte.