
1) Sett heisen i INSPEKSJON-modus

2) Kontroll av motorparametere
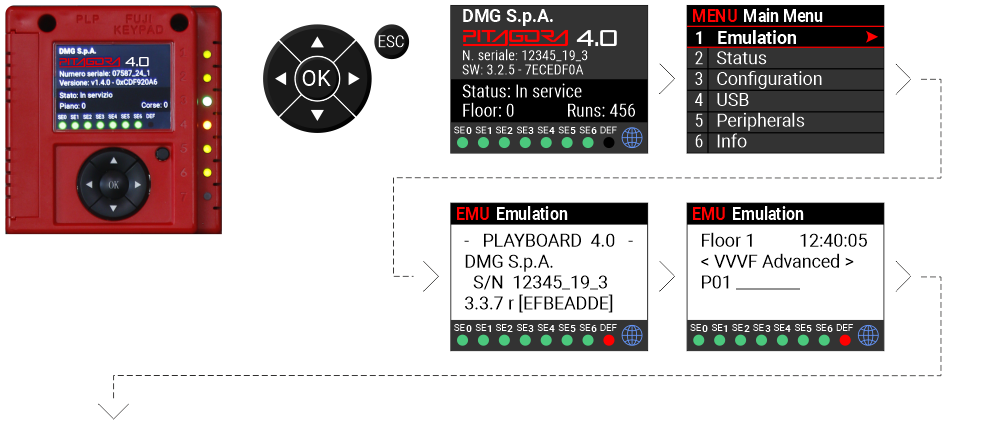
Fra hovedmenyen får du tilgang til Emulering-menyen.
Hovedmeny > Emulering > VVVF Avansert
GIRmotorer
Parametere er vanligvis forhåndsinnstilt hvis spesifisert ved bestilling .
| VVVF Fuji-parameter | Beskrivelse | Note |
|---|---|---|
| P01 – Motorpoler | Angi antall motorpoler | |
| F03 – Maksimal hastighet | Angi maksimal motorhastighet (RPM) | |
| F04 – Nominell hastighet | Angi motorens nominelle hastighet (Hz) | |
| F05 – Nominell spenning | Angi motorens nominelle spenning | |
| P03 – Motorens nominelle strøm | Angi maskinens nominelle strømstyrke | |
| P02 – Motorens nominelle grense | Angi maskinens nominelle effekt | |
| C11 – Høy hastighet | Still inn høy hastighet C11 (verdi angitt på motorens merkeplate) | Kun med magnetiske sensorer tellesystem (FAI / FAS) |
| C10 – Middels hastighet | Still inn inspeksjons-/mellomhastighet C10 | som ovenfor |
| C07 – Krypehastighet | Sett lav hastighet C07 (vanligvis 10 % av C11) | som ovenfor |
| L01 – PG-valg | Angi motorkodertypen | Kun lukkede sløyfesystemer |
| L02 – PG-oppløsning | Angi motorkoderens oppløsning (vanligvis 1024) | som ovenfor |
| P04 – Motorens autotuning 3 = Åpen sløyfe 2 = Lukket sløyfe 1= Motorer med ukjente data |
GIRFRIE motorer
Parametere er vanligvis forhåndsinnstilt hvis spesifisert ved bestilling .
| VVVF Fuji-parameter | Beskrivelse | Note |
|---|---|---|
| P01 – Motorpoler | Angi antall motorpoler | |
| F03 – Maksimal hastighet | Angi maksimal motorhastighet (RPM) | |
| F04 – Nominell hastighet | Angi motorens nominelle hastighet (Hz) | |
| F05 – Nominell spenning | Angi motorens nominelle spenning | |
| P08 – M-%X | Sett verdien «10 %» | Bekreft den foreslåtte verdien |
| P07 – M-%R1 | Sett verdien «5 %» | som ovenfor |
| P06 – M-Neistrøm. | Sett verdien «0 Ampere» | som ovenfor |
| P03 – Motorens nominelle strøm | Angi maskinens nominelle strømstyrke | |
| P02 – Motorens nominelle grense | Angi maskinens nominelle effekt | |
| C11 – Høy hastighet | Still inn høy hastighet C11 (verdi angitt på motorens merkeplate) | Kun med magnetiske sensorer tellesystem (FAI / FAS) |
| C10 – Middels hastighet | Still inn inspeksjons-/mellomhastighet C10 | som ovenfor |
| C07 – Krypehastighet | Sett lav hastighet C07 (vanligvis 10 % av C11) | som ovenfor |
| L01 – PG-valg | Angi motorkodertypen | Kun lukkede sløyfesystemer |
| L02 – PG-oppløsning | Angi motorkoderens oppløsning (vanligvis 1024) | som ovenfor |
| L03 – PP-tuning 4 = Statisk tuning (avhengig av motortype 5 = Dynamisk tuning (fri for tau) |
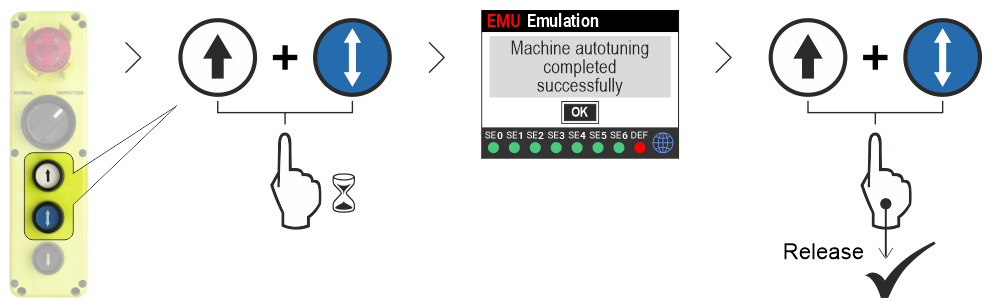
3) Avslutning av selvlæringsfasen
Feilsøking av poljustering
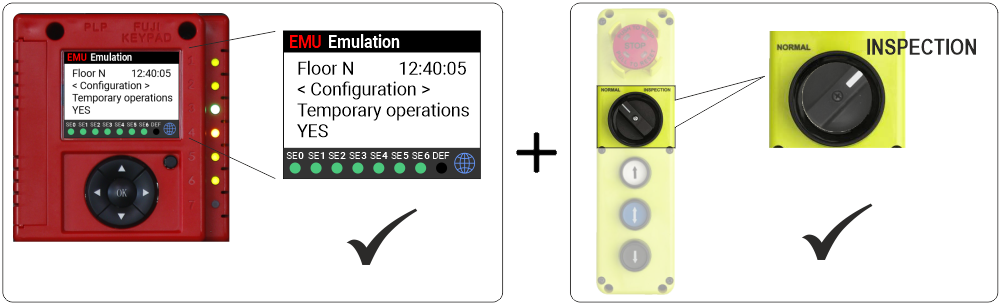
Sjekk at heisen er i midlertidig drift.
Hovedmeny > Emulering > Konfigurasjon > Midlertidige operasjoner > JA
Prøv å flytte kabinen OPP/NED manuelt.
Hvis heisen ikke reagerer deretter, følg instruksjonene nedenfor.
Endre H190-verdien fra 1 til 0
| Feil kode | Typiske VVVF-feil etter mislykket autotuning (Meny -> VVVF Avansert) |
|---|---|
| 52 – OS | Overhastighet |
| 52 – ErE | Hastighetsavvik (overskytende hastighetsavvik) |
| 52 – OI1 | Motoroverbelastning |
| 52 – OLU | Overbelastning av omformeren |
| 52 – Okt1 | Overstrøm under akselerasjon |
| 52 – Okt2 | Overstrøm under retardasjon |
| 52 – Okt3 | Overstrøm ved konstant hastighet |

Utfør følgende kontroller

Problemet er løst
Bytt verdier for parameterne E98–E99
Problemet er løst
- Bekreft at L80=1 og L82=0,2
- Sjekk kablingen til bremsene
- Sjekk bremsestrammingen
«AKTIVER» først, deretter «FREMMEDREV»
eller «REVERS» (avhengig av retning)
- Bekreft farge og rekkefølge på koderens kabling
- Koble kabelskjermen til «CM»-terminalen på kortet