
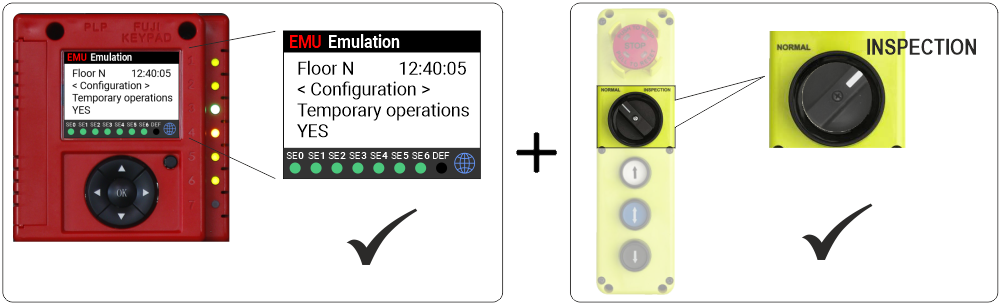
1) Coloque o elevador no modo INSPEÇÃO

2) Verificação dos parâmetros do motor
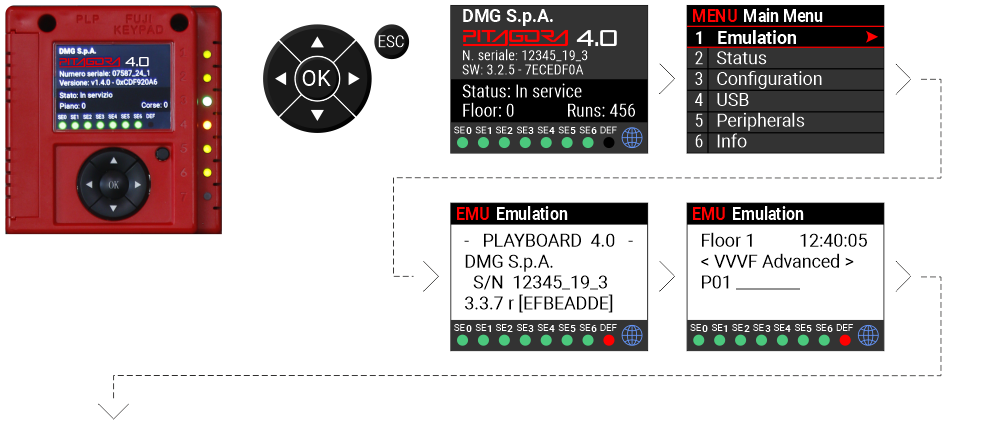
No menu principal, aceda ao menu Emulação.
Menu principal > Emulação > VVVF Avançado
Motores com engrenagens
Parâmetros normalmente pré-definidos, se especificados no momento da encomenda.
| Parâmetro VVVF Fuji | Descrição | Nota |
|---|---|---|
| P01 – Pólos do motor | Insira o número de pólos do motor | |
| F03 – Velocidade máxima | Introduza a velocidade máxima do motor (RPM) | |
| F04 – Velocidade nominal | Introduza a velocidade nominal do motor (Hz) | |
| F05 – Tensão nominal | Introduza a tensão nominal do motor | |
| P03 – Corrente nominal do motor | Introduza a intensidade de corrente nominal da máquina | |
| P02 – Capacidade nominal do motor | Insira a potência nominal da máquina | |
| C11 – Alta velocidade | Defina a velocidade elevada C11 (valor especificado na placa de identificação do motor) | Apenas com sensores magnéticos Sistema de contagem (FAI / FAS) |
| C10 – Velocidade média | Inspecionar o conjunto/velocidade intermédia C10 | como acima |
| C07 – Velocidade de deslizamento | Defina a velocidade baixa C07 (normalmente 10% de C11) | como acima |
| L01 – PG selecionar | Definir o tipo de codificador do motor | Apenas sistemas de circuito fechado |
| L02 – Resolução PG | Defina a resolução do codificador do motor (normalmente 1024) | como acima |
| P04 – Autotuning do motor 3 = Circuito aberto 2 = Circuito fechado 1= Motores com dados desconhecidos |
Motores sem engrenagens
Parâmetros normalmente pré-definidos, se especificados no momento da encomenda.
| Parâmetro VVVF Fuji | Descrição | Nota |
|---|---|---|
| P01 – Pólos do motor | Insira o número de pólos do motor | |
| F03 – Velocidade máxima | Introduza a velocidade máxima do motor (RPM) | |
| F04 – Velocidade nominal | Introduza a velocidade nominal do motor (Hz) | |
| F05 – Tensão nominal | Introduza a tensão nominal do motor | |
| P08 – M-%X | Defina o valor «10%» | Confirme o valor proposto |
| P07 – M-%R1 | Defina o valor “5%” | como acima |
| P06 – Corrente sem carga M. | Defina o valor «0 Ampere» | como acima |
| P03 – Corrente nominal do motor | Introduza a intensidade de corrente nominal da máquina | |
| P02 – Capacidade nominal do motor | Insira a potência nominal da máquina | |
| C11 – Alta velocidade | Defina a velocidade elevada C11 (valor especificado na placa de identificação do motor) | Apenas com sensores magnéticos Sistema de contagem (FAI / FAS) |
| C10 – Velocidade média | Inspecionar o conjunto/velocidade intermédia C10 | como acima |
| C07 – Velocidade de deslizamento | Defina a velocidade baixa C07 (normalmente 10% de C11) | como acima |
| L01 – PG selecionar | Definir o tipo de codificador do motor | Apenas sistemas de circuito fechado |
| L02 – Resolução PG | Defina a resolução do codificador do motor (normalmente 1024) | como acima |
| L03 – Afinação P.P. 4 = Afinação estática (dependendo do tipo de motor 5 = Afinação dinâmica (sem cordas) |
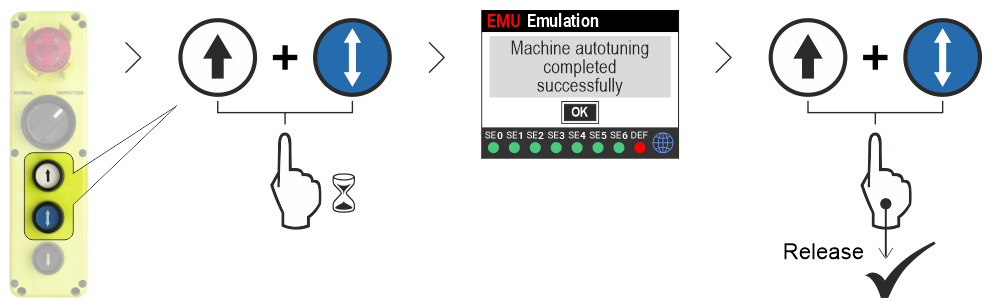
3) Encerramento da fase de autoaprendizagem
Resolução de problemas de afinação do poste
Verifique se o elevador está em funcionamento temporário.
Menu principal > Emulação > Configuração > Operações temporárias > SIM
Tente mover a cabine para cima/para baixo manualmente.
Se o elevador não reagir adequadamente, siga as instruções abaixo.
Altere o valor H190 de 1 para 0
| Erro no código | Erros típicos do VVVF após falha na sintonização automática (Menu -> VVVF Avançado) |
|---|---|
| 52 – Sistema operativo | Excesso de velocidade |
| 52 – ErE | Desfasamento de velocidade (excesso de desvio de velocidade) |
| 52 – OI1 | Sobrecarga do motor |
| 52 – OLU | Sobrecarga do inversor |
| 52 – Oc1 | Sobrecorrente durante a aceleração |
| 52 – Oc2 | Sobrecorrente durante a desaceleração |
| 52 – Oc3 | Sobrecorrente durante velocidade constante |

Realize as seguintes verificações

Problema resolvido
Trocar os valores dos parâmetros E98 – E99
Problema resolvido
- Verifique se L80=1 e L82=0,2
- Verifique a cablagem dos travões
- Verifique a tensão dos travões
Primeiro «ENABLE» (ativar), depois «FORWARD» (avançar)
ou «REVERSE» (reverter) (conforme a direção)
- Verifique a cor e a sequência da ligação do codificador
- Ligue a blindagem do cabo ao terminal «CM» da placa.