(v 2.0)

Turvallisuus- ja käyttöohjeet
Ennen tuotteidemme asentamista suosittelemme lukemaan turvallisuus- ja käyttöohjeet alla olevasta linkistä.

Tärkeimmät ominaisuudet
- 3 releen kynnysarvoa + analoginen lähtö.
- Hissikorin dynaamisen kuormituksen automaattinen kompensointi ajon aikana (kuorman lukitus).
- Se voi hallita jopa 8 erillistä anturia.
- Säädettävä kompensaattori liikkuvan akselin kaapelin painolle.
- Kunkin yksittäisen anturin painon ja lähtöjännitteen näyttö.
- IPX3-suojaus ulkoisen suojuksen ansiosta.
- Laitteiden hallinta Fusion-sovelluksen kautta paikallisessa yhteydessä.
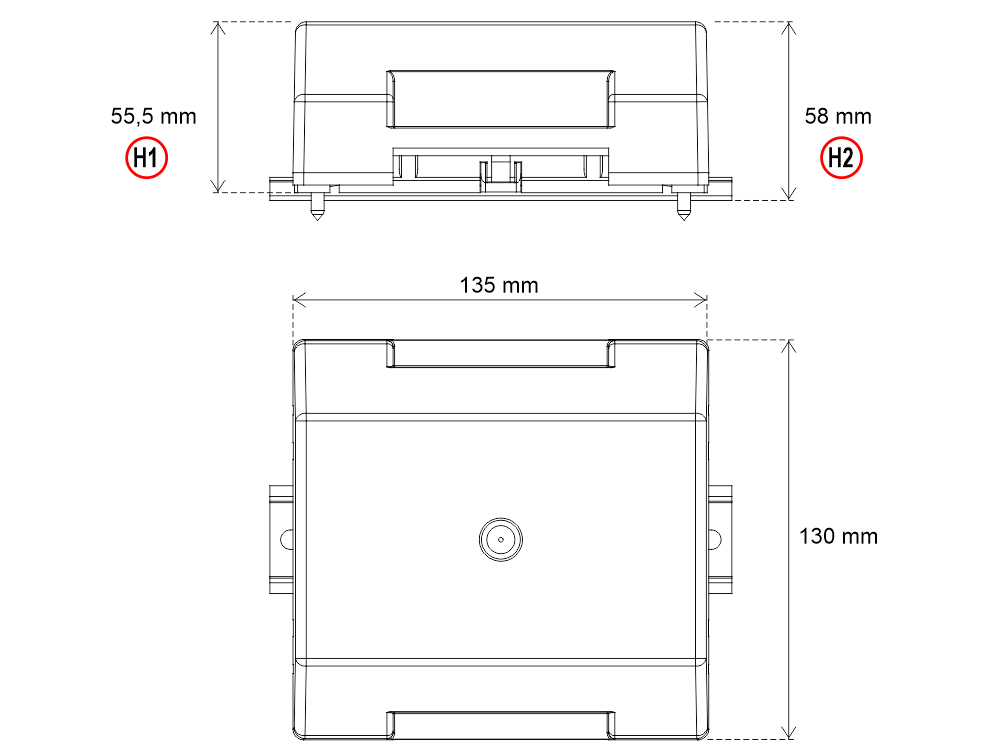
H1 – Kiinnitys ruuveilla
H2 – DIN-kiskokiinnitys
Järjestelmän komponentit
LLEC7 elektroninen ohjausyksikkö + ulkoiset anturit
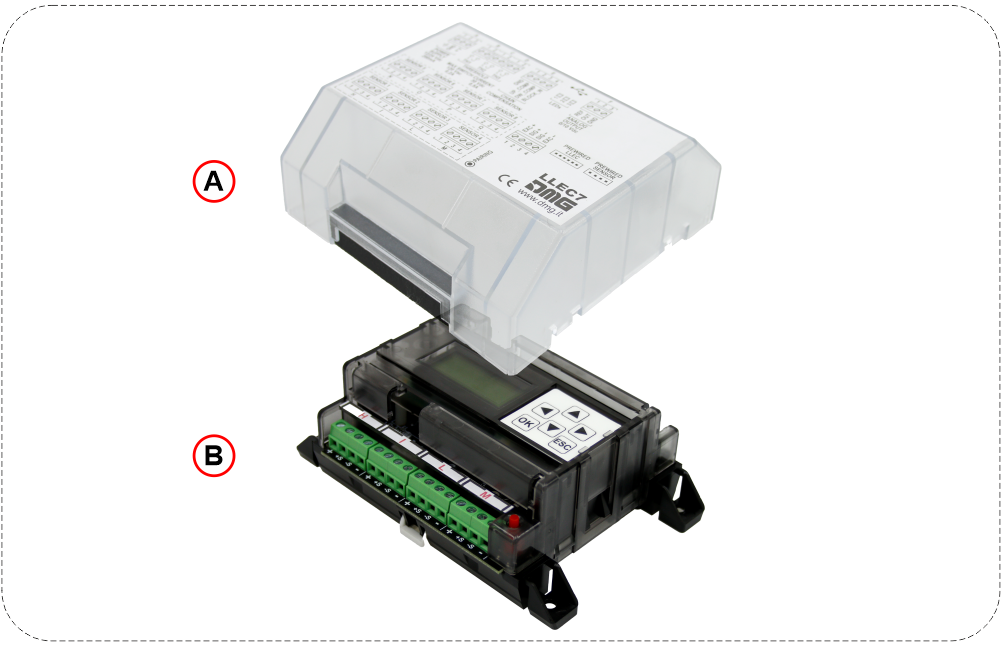
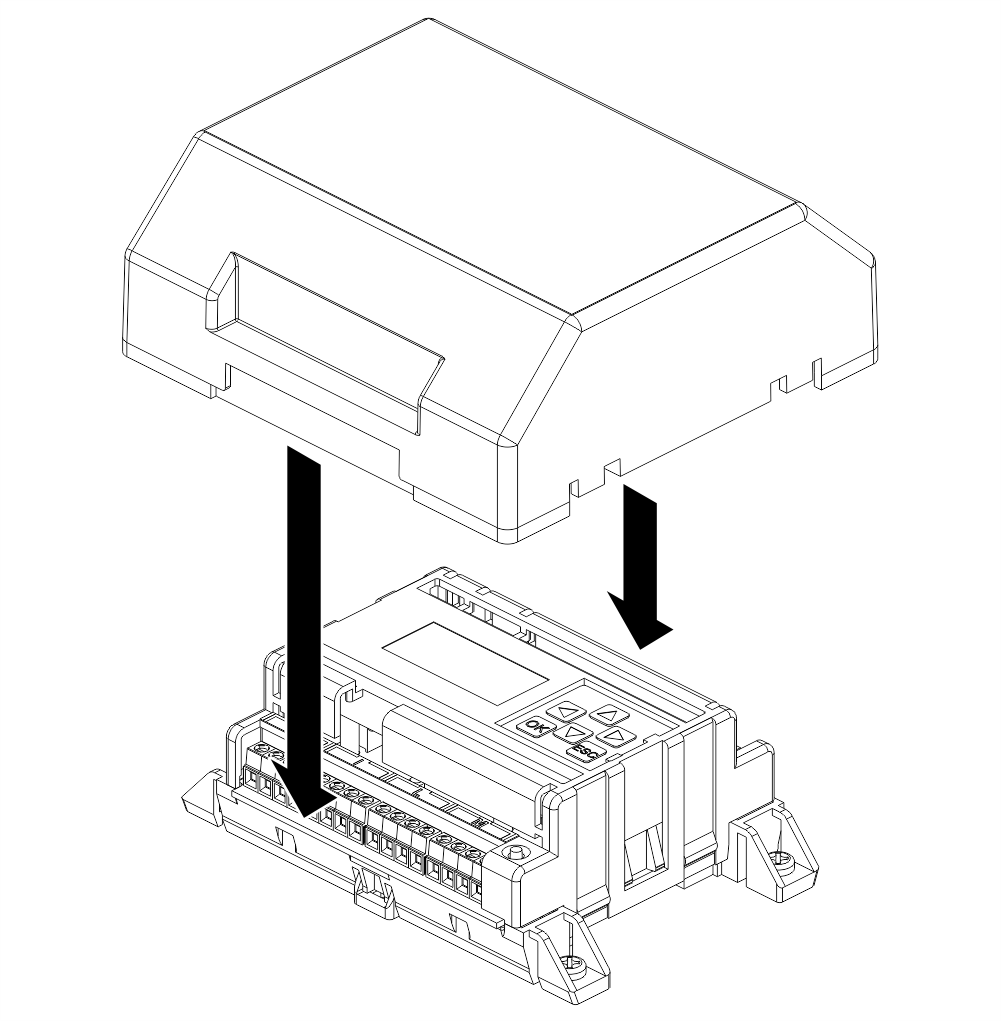
A) – Ulkoinen suojaus vettä vastaan (IPX3)
B) – LLEC7-sähköinen ohjausyksikkö
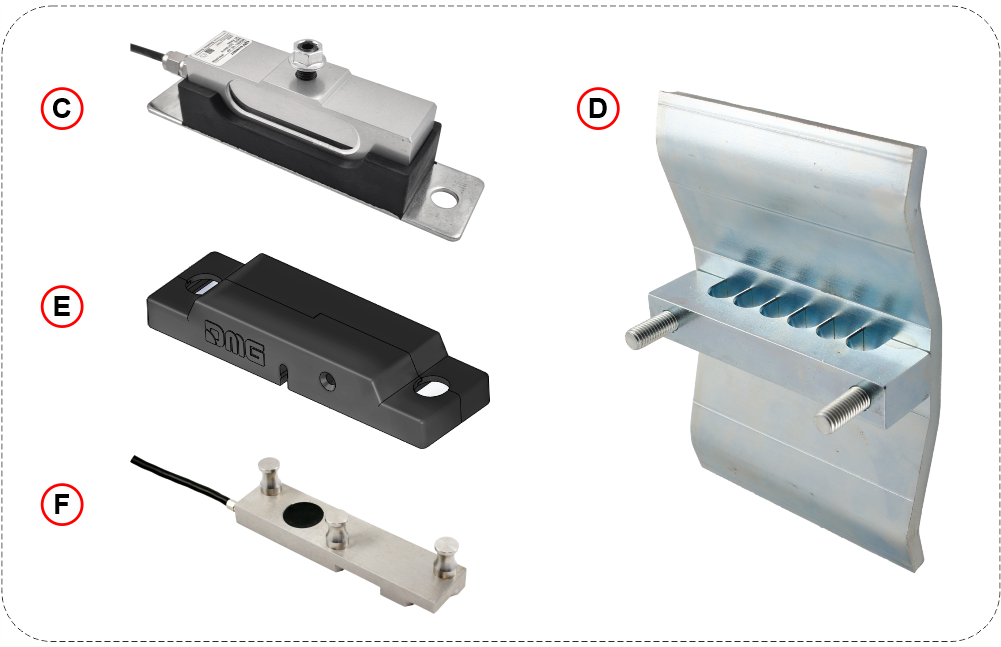
C) – Ulkoinen anturisarja hissikopion pohjaan (6 m kaapeli)
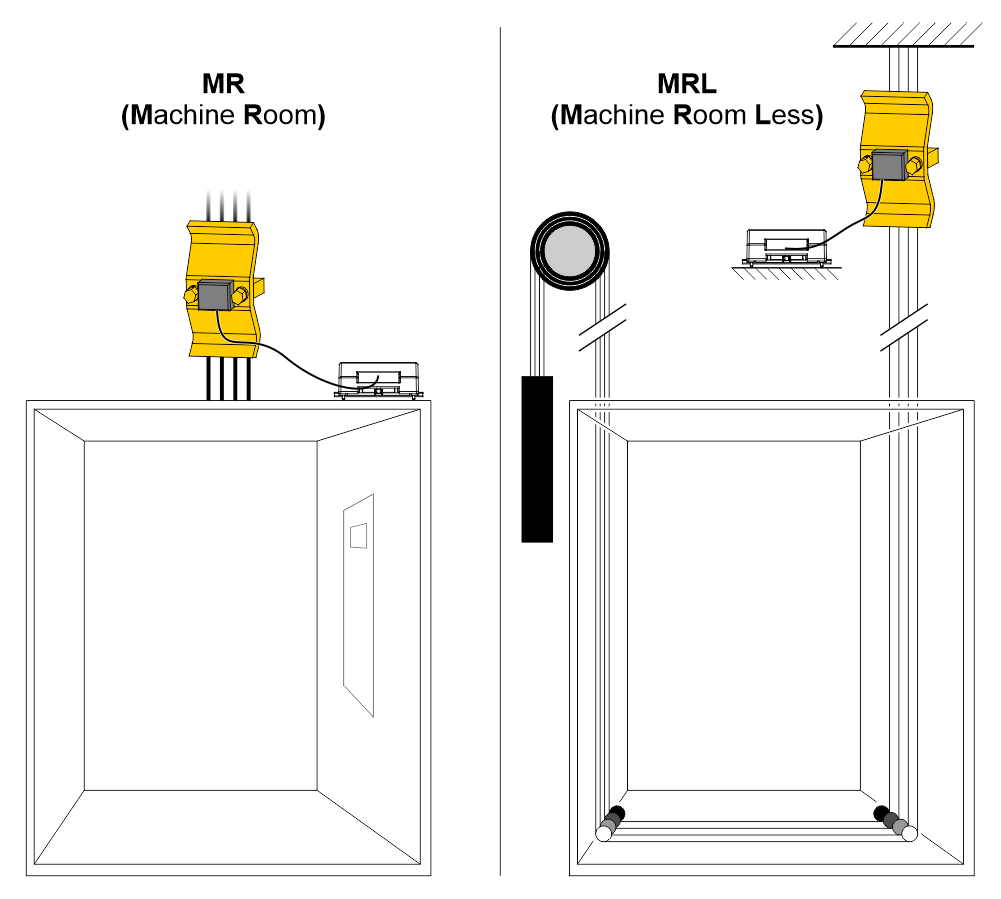
D) – Ulkoinen anturi köysille
E) – Ulkoinen anturi kopion runkoon
F) – Ulkoinen anturi yhdelle köydelle
Valinnaiset komponentit
 koodi [AUT.KIT08] – Magneettiset anturit (NC)
koodi [AUT.KIT08] – Magneettiset anturit (NC)
 koodi [EWS.AL212] – Tehoyksikkö 220 V
koodi [EWS.AL212] – Tehoyksikkö 220 V
Hallinta Fusion-sovelluksen kautta

DMG Fusion -sovellus, joka on yhdistetty Bluetooth®-yhteydellä LLEC7-laitteeseen, mahdollistaa laitteessa olevien kaikkien toimintojen suorittamisen.
Kirjautuminen ei ole tarpeen.
Mobiilisovelluksen käyttöliittymä on tarkka kopio LLEC7:n näppäimistöstä ja LCD-näytöstä, ja sen avulla asentaja voi suorittaa kaikki toiminnot ilman suoraa vuorovaikutusta laitteen kanssa.
Asennus, pariliitos ja käyttö
Download asenna Fusion-sovellus sivulla olevan QR-koodin avulla.

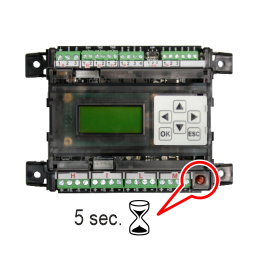 | 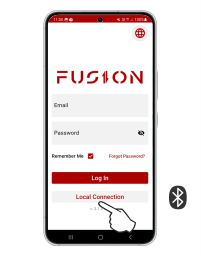 | 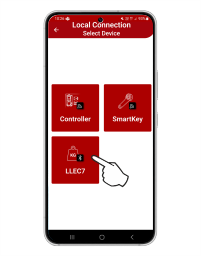 |
| Pidä painettuna (5 sekuntia) | Voit käyttää laitetta paikallisesti kirjautumatta sisään (valitse ”Paikallinen yhteys”). | Valitse hallittavan laitteen tyyppi (LLEC7). |
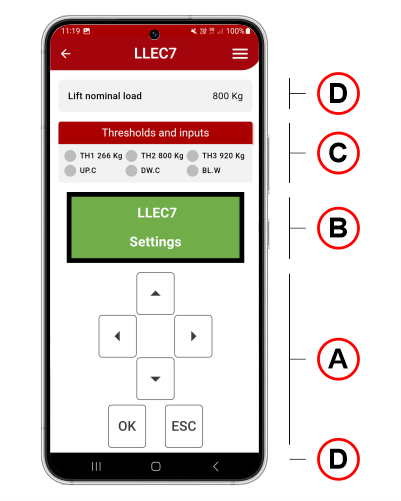
A) Ohjelmointinäppäimistö
B) LCD-näyttö
C) Tila- ja kynnysarvot / korvauksen syöttöjen (UP.C, DW.C) ja painolohkon (BL.W) tila
D) Näytetään myös (näytön ylä- ja alaosassa):
• Kalibroinnin aikana syötetyt arvot, kuten nostokuorma, anturien lukumäärä ja tyyppi, järjestelmän köysisuhde.
• Laitteen laitteisto- ja ohjelmistoversio.
Asennus
LLEC7 elektronisen ohjausyksikön kiinnitys
– Kiinnitys ruuveilla –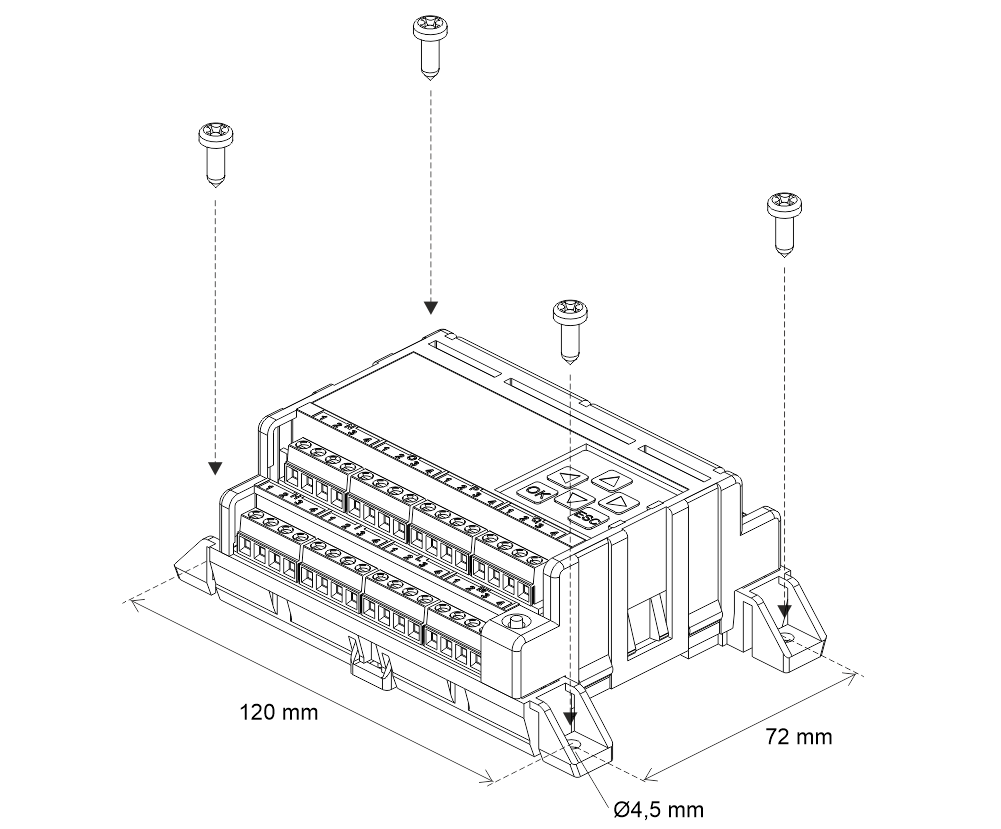
– DIN-kiskokiinnitys –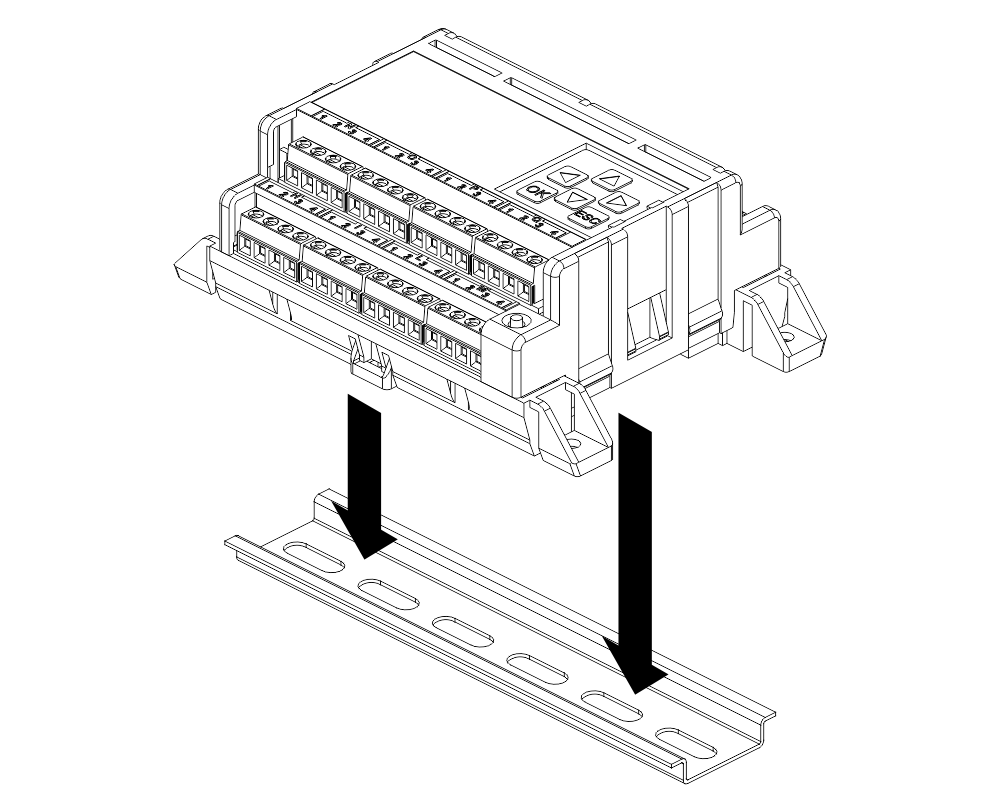
– Ulkoisen suojakannen asennus –
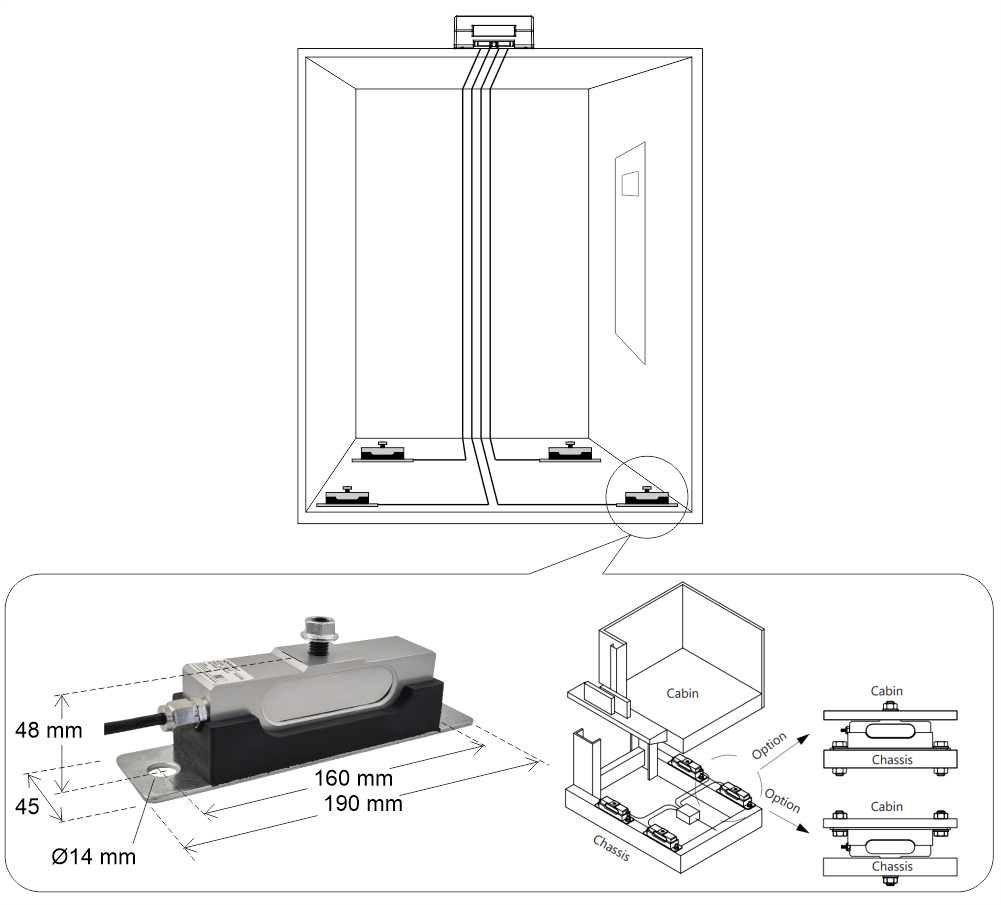
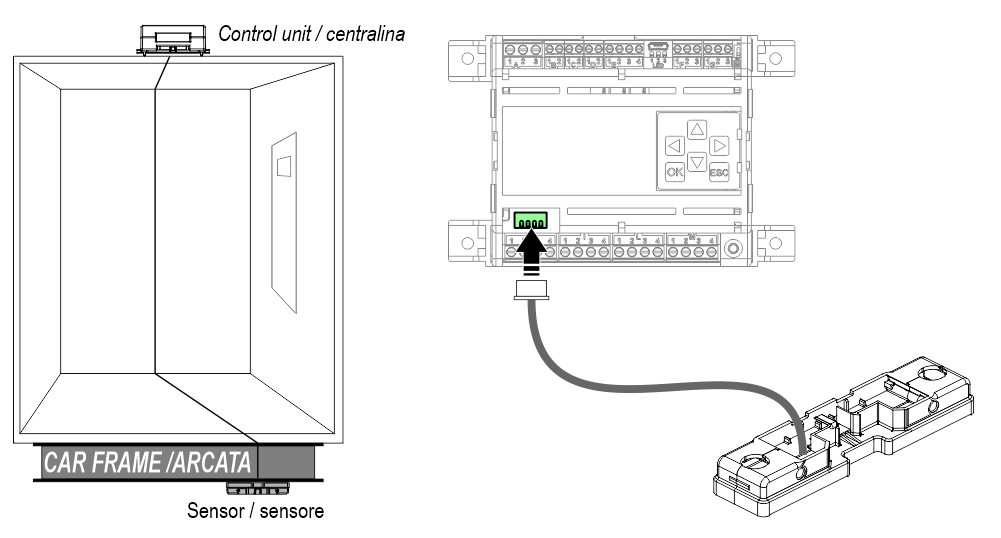
Auton pohja-anturien asennus
Köysianturin asennus
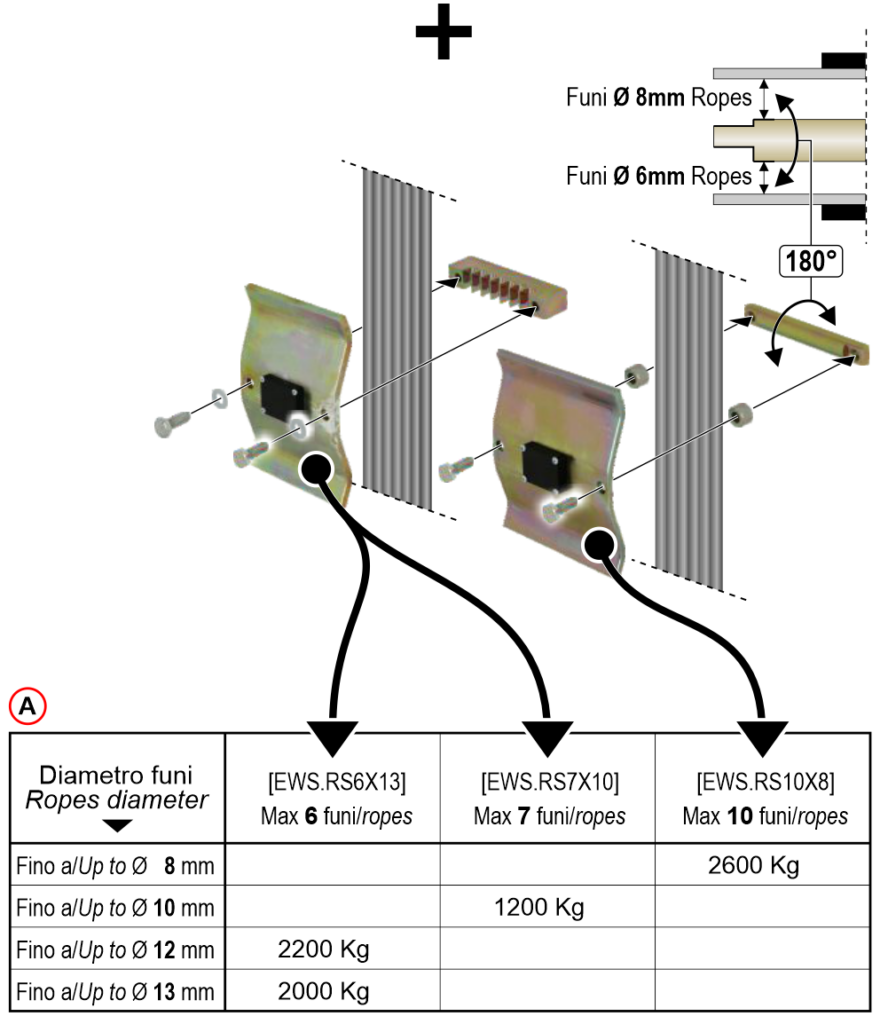
A) – Suurin sallittu kuorma (massarakenne + nostokapasiteetti)
Nostoköyden ollessa 2:1 (anturi kiinteässä päässä + pulley) suurin sallittu kuorma kaksinkertaistuu.
Yksittäisen köysianturin asennus
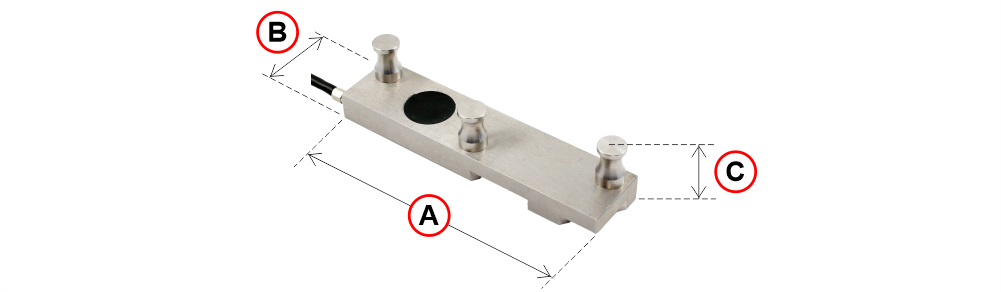
| Anturin nimelliskuormitus | A | B | C |
| 750 kg (köydet 6–8 mm) | 87 mm | 20 mm | 21,5 mm |
| 1000 kg (köydet 9–11 mm) | 120 mm | 28 mm | 28,5 mm |
| 1000 kg (köydet 12–15 mm) | 132 mm | 36 mm | 33,5 mm |
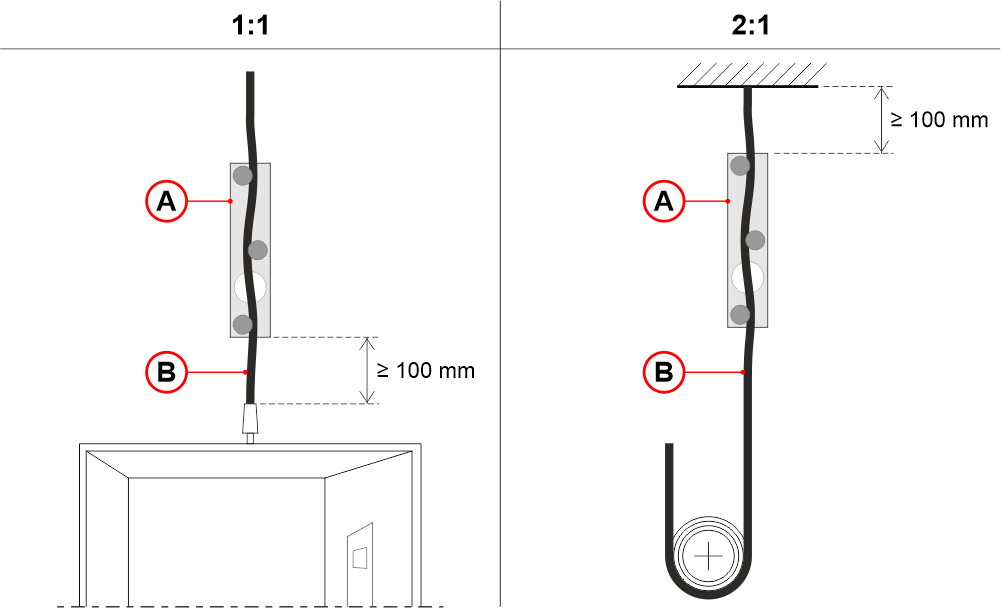
A) Yksittäinen köysianturi
B) Yksittäinen köysi
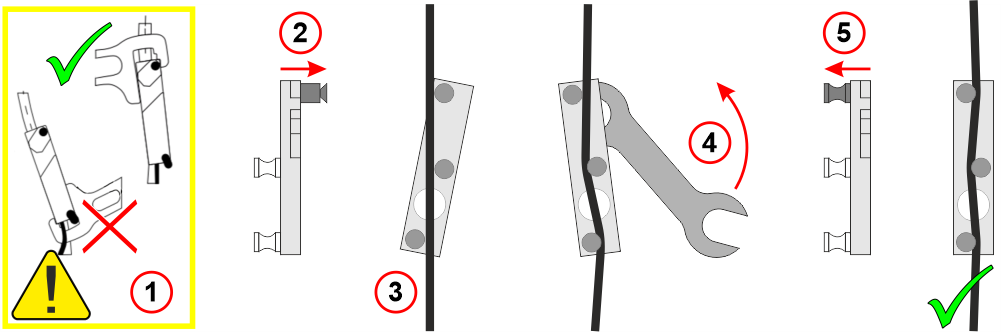
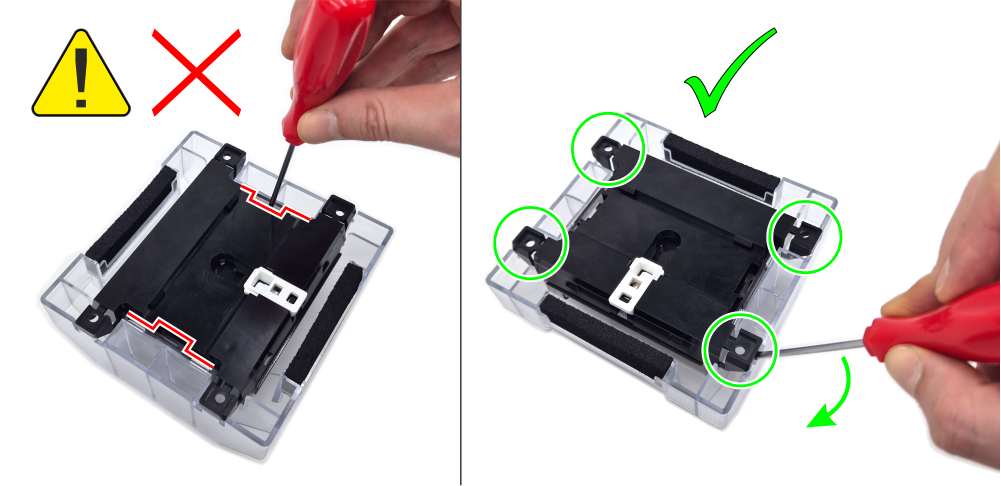
Noudata yllä olevia ohjeita ja varmista, että käytät anturin yläosassa olevaa avainta (4), koska alaosassa on vaara, että kaapeli katkeaa.
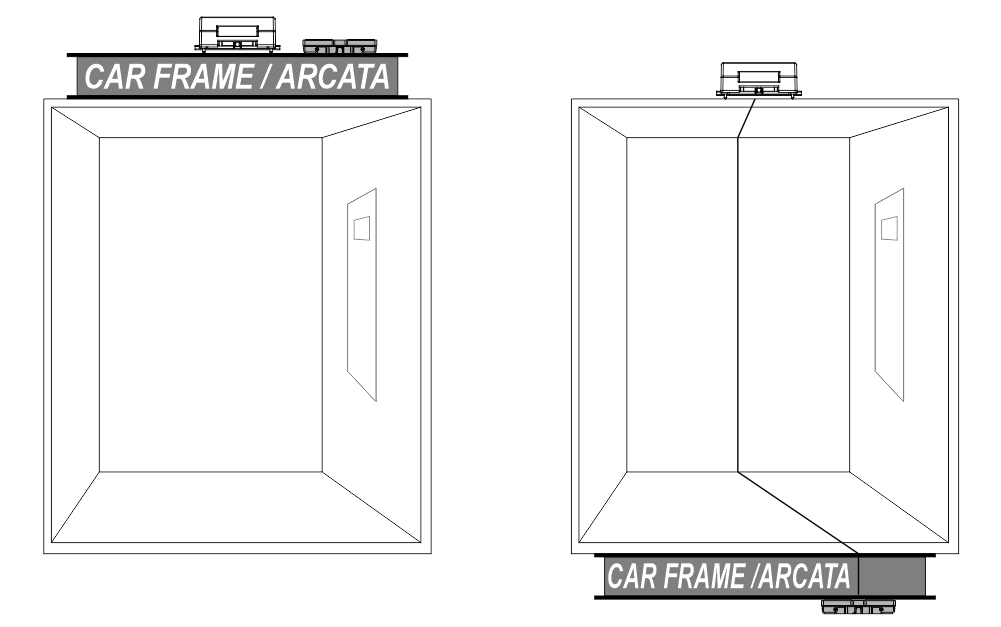
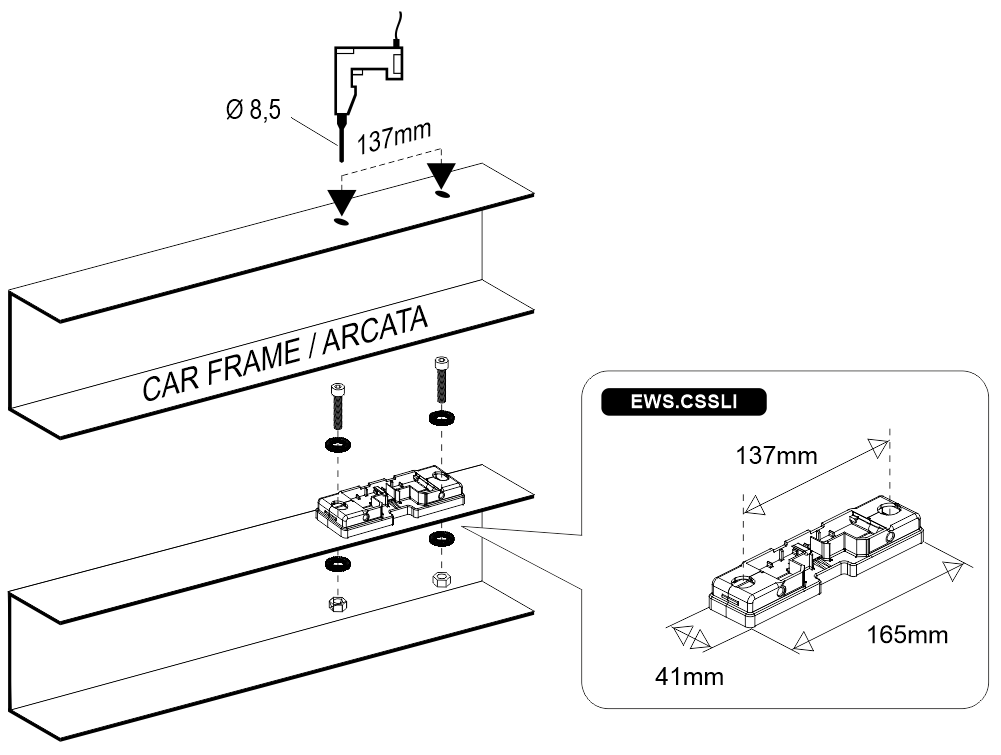
Auton rungon anturin asennus
Kytkentäohjeet
Liittimien yleiskuvaus
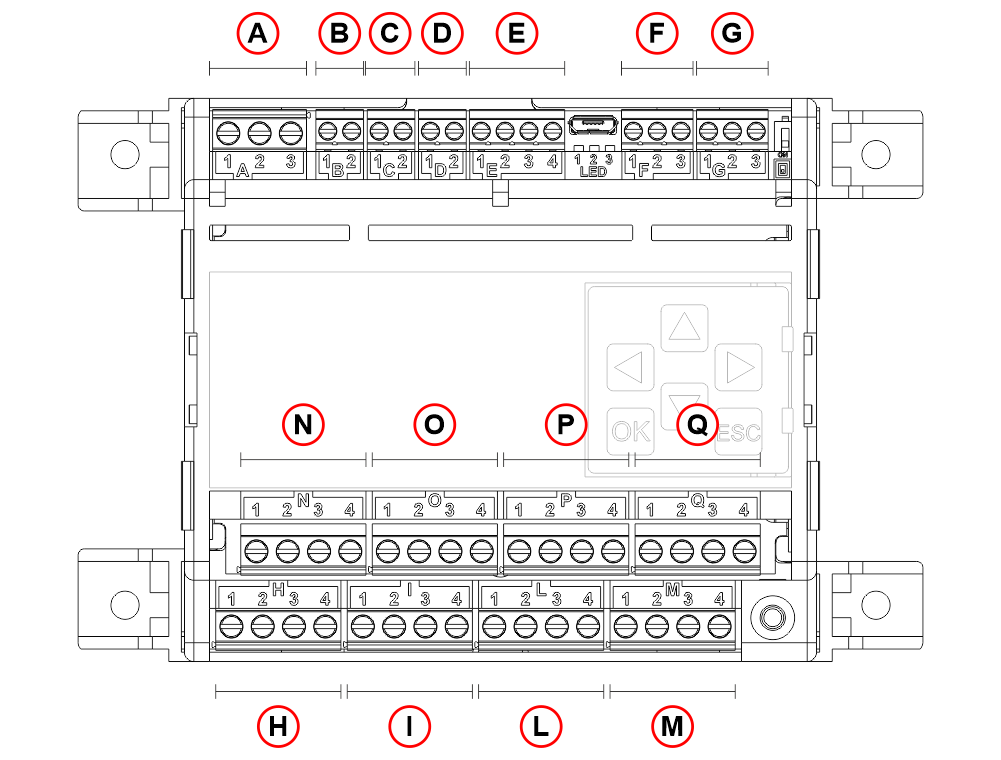
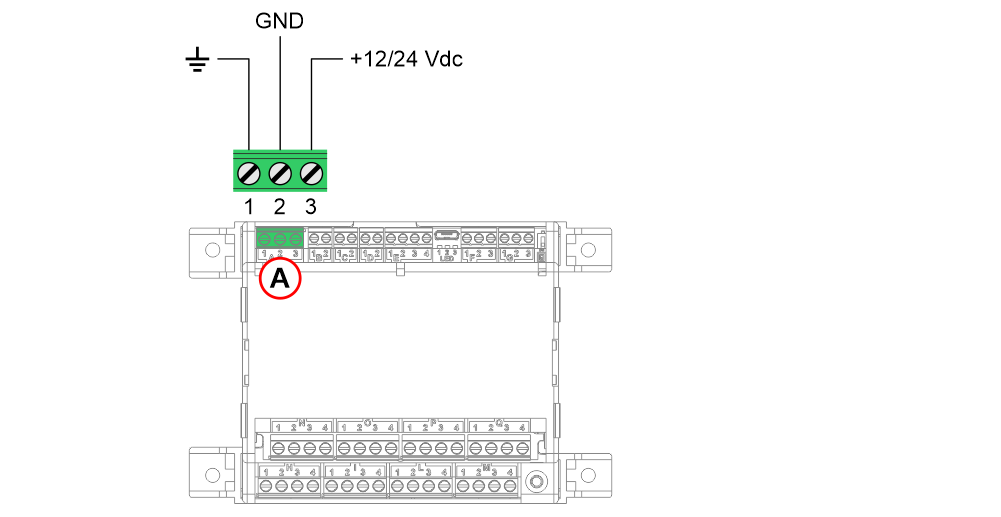
- A – Virtalähteen tulo
1 – Maadoitus
2 – GND
3 – +12/24 Vdc - B – Kynnysarvo 1 (oletusarvoisesti 50 % hissin nimelliskuormasta)
1 – COM
2 – NO/NC - C – Kynnysarvo 2 (oletusarvoisesti 100 % hissin nimelliskuormasta)
1 – COM
2 – NO/NC - D – Kynnysarvo 3 (oletusarvoisesti 115 % hissin nimelliskuormasta)
1 – COM
2 – NO/NC - E – Liikkuvan kaapelin kompensointitulo / Lohkon painotulo
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – BLOC_W - F – Analogialähtö
1 – REF
2 – OUT
3 – GND - G – CAN-tulo (EI käytössä)
1 – CAN_L
2 – CAN_SHLD
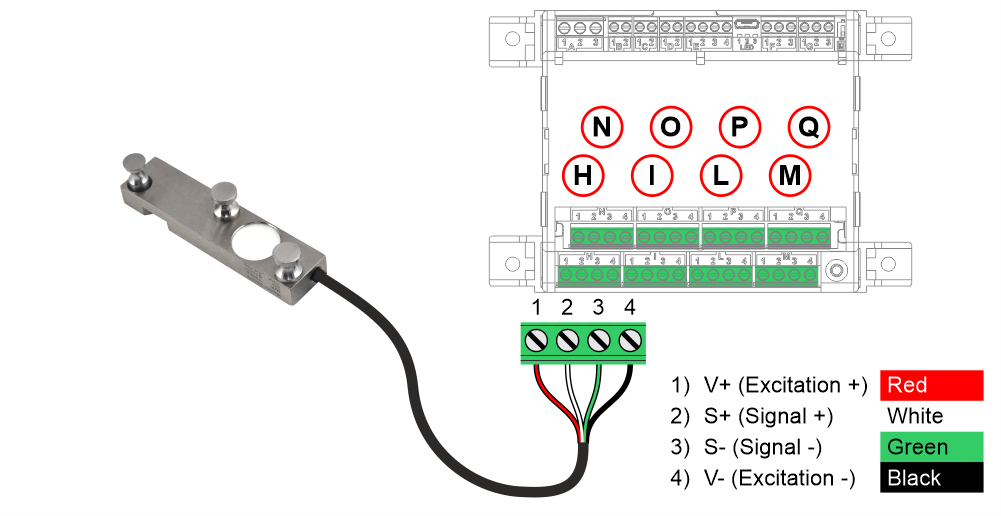
3 – CAN_H - H / I / L / M – Anturitulo 1 / 2 / 3 / 4
N / O / P / Q – Anturitulo 5 / 6 / 7 / 8
1 – V+ (viritys +)
2 – S+ (signaali +)
3 – S- (signaali -)
4 – V- (viritys -)
Virtalähteen tulo
Kynnysarvojen yhteys
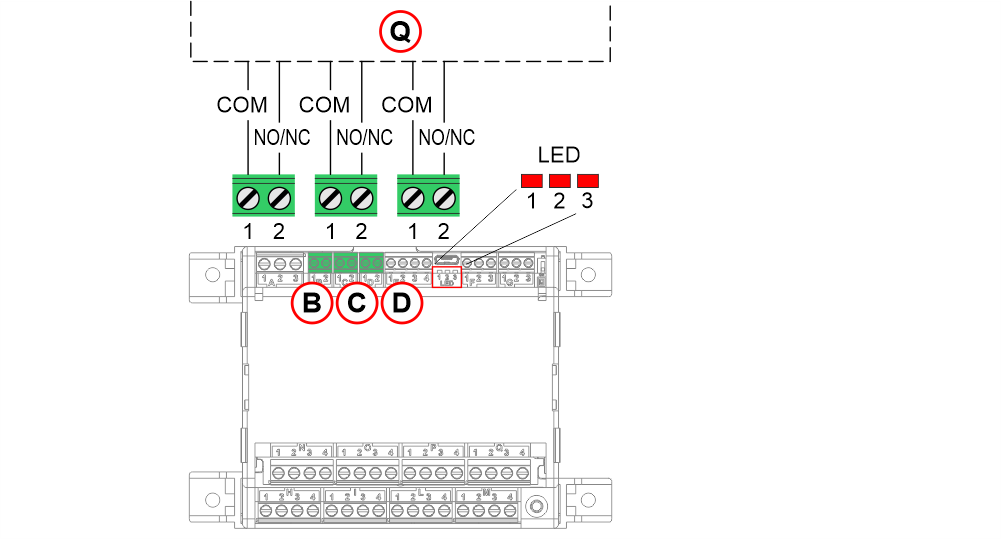
- B) – Kynnysarvo 1 (oletusarvoisesti 25 % hissin nimelliskuormasta)
1 – COM
2 – NO/NC - C) – Kynnysarvo 2 (oletusarvoisesti 100 % hissin nimelliskuormasta)
1 – COM
2 – NO/NC - D) – Kynnysarvo 3 (oletusarvoisesti 115 % hissin nimelliskuormasta)
1 – COM
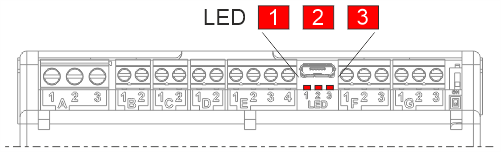
2 – NO/NC - Q) – Ohjain
- Kynnys LED – LED syttyy, jos kynnys on aktiivinen.
LLEC7 + Pitagora 4.0 -ohjain
Yhteys Pitagora 4.0 -järjestelmään muodostetaan ohjaamon yläosassa sijaitsevan TOC-laatikon kautta.
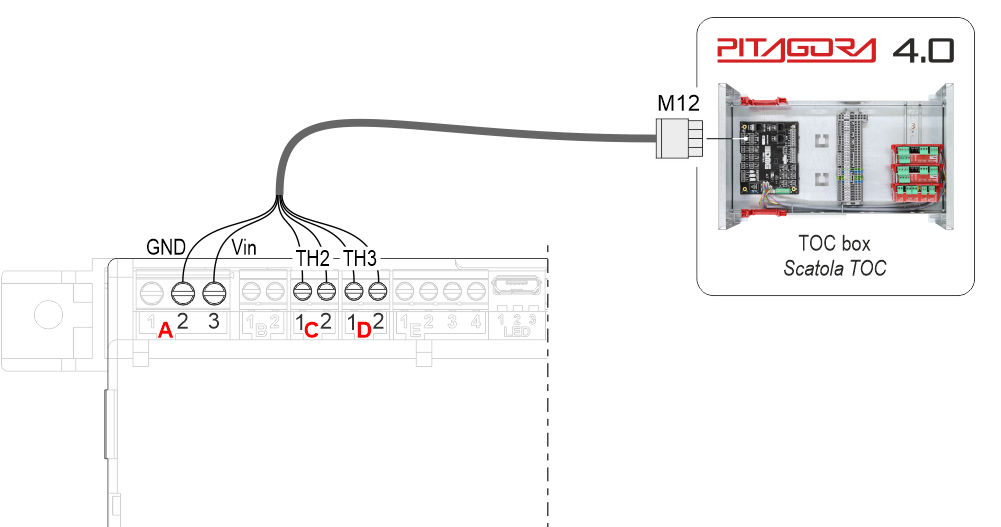
Kaapeli syöttää virtaa LLEC7:lle ja sisältää myös kynnysarvot TH2 (täysi auto 100 %) ja TH3 (ylikuormitus 115 %).
LLEC7 + NON-DMG-ohjain
Alla esitetty liitäntä tukee enintään 8 anturia.
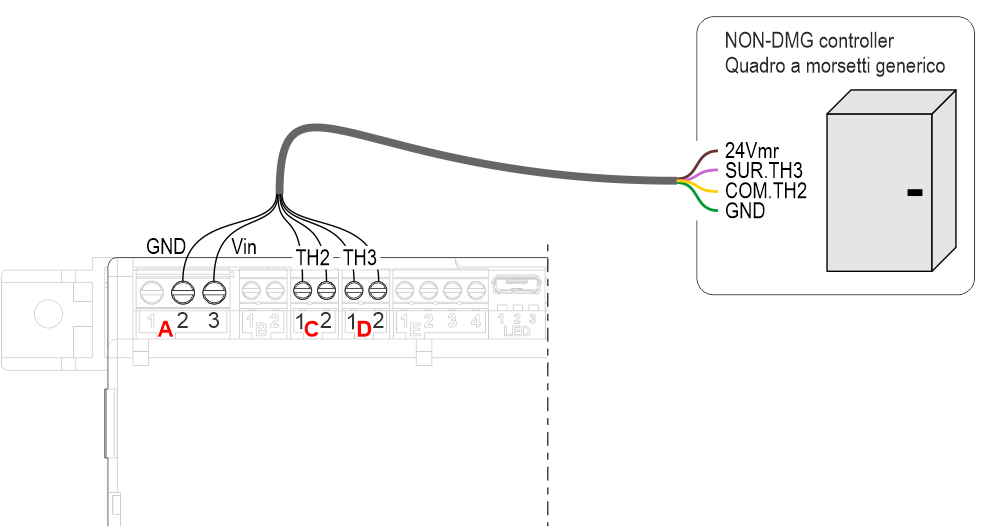
Kaapeli (ei sisälly laitteen toimitukseen) syöttää virtaa LLEC7-laitteeseen ja sisältää myös kynnysarvot TH2 (täysi auto 100 %) ja TH3 (ylikuormitus 115 %).
Liikkuvan akselin kaapelikompensoinnin anturien liittäminen
Hississä, joissa kaapelit ovat painavia, niiden kompensointi on tärkeä vaihe. Tärkeää tietää:
1) Hissin suurin kuorma.
2) Liikkuvien kaapeleiden paino metriä kohti.
3) Kuilun kokonaispituus.
Ennen tämän toimenpiteen suorittamista on pääliitäntöjen lisäksi liitettävä ulkoinen asentoanturi [AUT.KIT08].
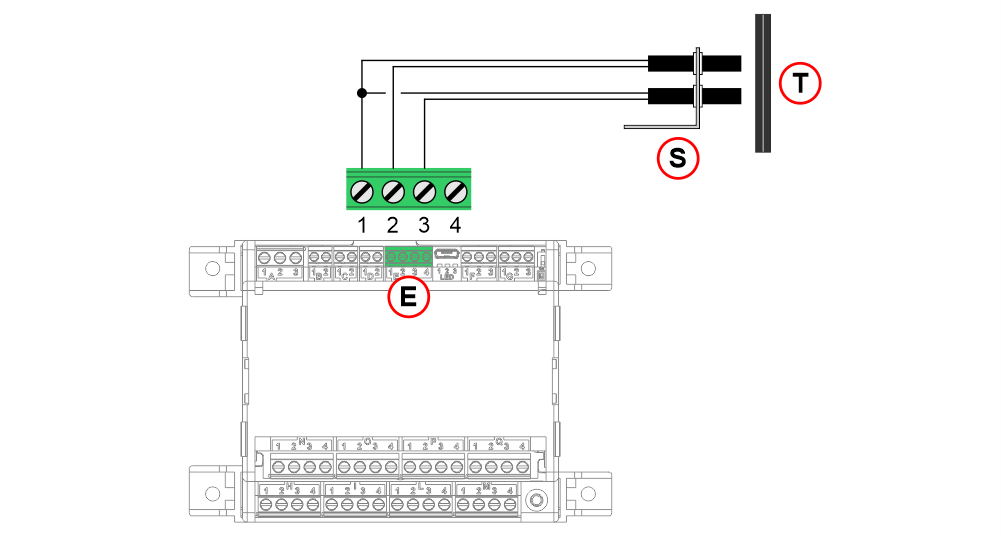
- E – Liikkuva kaapelikompensointituloliitäntä
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – X (Katso punnituslukitustoiminto) - S – Asentoanturit ohjaamon yläosassa
- T – 1 magneetti jokaisessa kerroksessa
Punnitussulku-toiminnon kytkentä
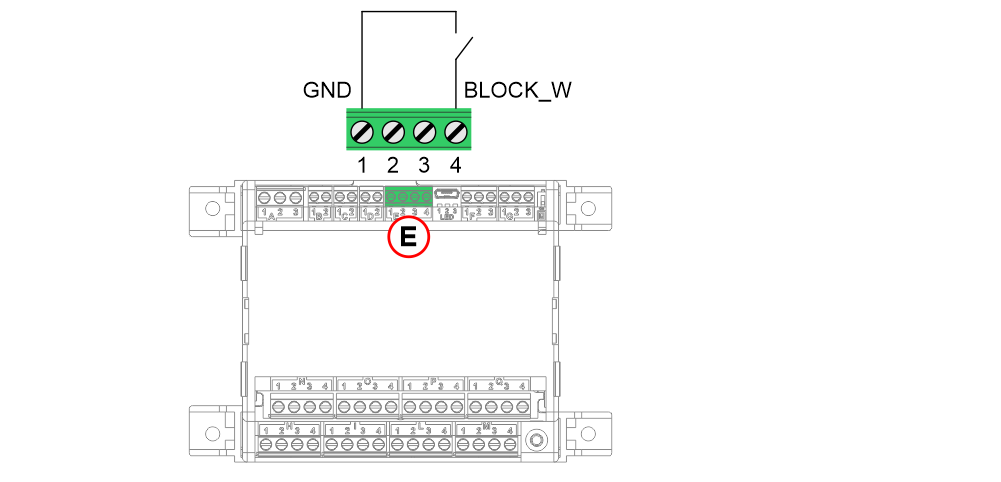
- E – Lohkon painon syöttö
1 – GND
2 – X
3 – X
4 – BLOCK_W

Tuloa ei saa kytkeä suoraan turvakytkentään.
Hissikorin pohjassa olevien anturien liitäntä
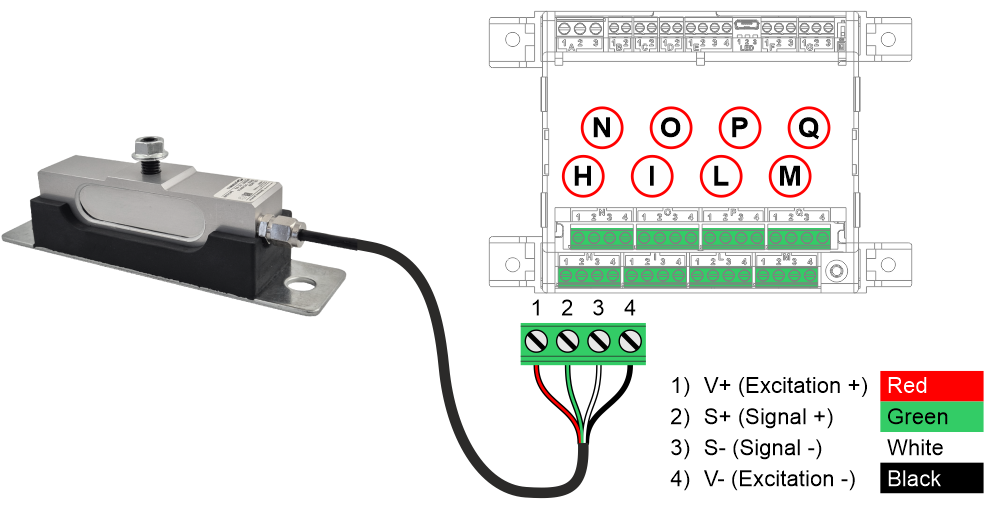
- H / I / L / M – Anturitulo 1 / 2 / 3/4
N / O / P / Q – Anturitulo 5 / 6 / 7 / 8 (vain valinnaisella laajennuskortilla)
1 – V+ (viritys +) kytketty punaiseen kaapeliin
2 – S+ (signaali +) kytketty vihreään kaapeliin
3 – S- (signaali -) kytketty valkoiseen kaapeliin
4 – V- (viritys -) kytketty mustaan kaapeliin
Liitäntäkaapelin pituus on 6 m.
Köysien anturin liitäntä
Yksittäisen köysianturin liitäntä
- H / I / L / M – Anturitulo 1 / 2 / 3 / 4
N / O / P / Q – Anturitulo 5 / 6 / 7 / 8 (vain valinnaisella laajennuskortilla)
1 – V+ (viritys +) kytketty punaiseen kaapeliin
2 – S+ (signaali +) kytketty valkoiseen kaapeliin
3 – S- (signaali -) kytketty vihreään kaapeliin
4 – V- (viritys -) kytketty mustaan kaapeliin
Auton rungon anturin liitäntä
Ohjelmointi
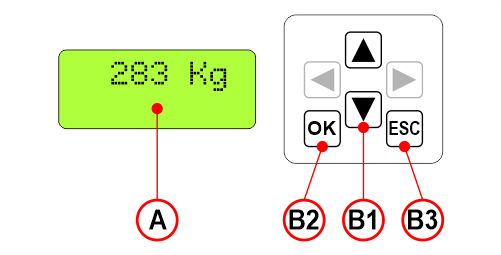
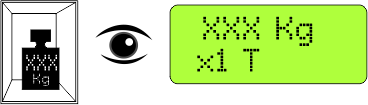
Näytön kalibroinnin jälkeinen tila
A) Hissikopissa havaittu nykyinen paino.
Ohjelmointinäppäimistö
B1) Selaa vaihtoehtoja nykyisellä tasolla.
B2) Avaa valikko ja vahvista valinta.
B3) Poistu nykyiseltä tasolta ja palaa edelliselle tasolle.
Ohjelmointivalikon kartta
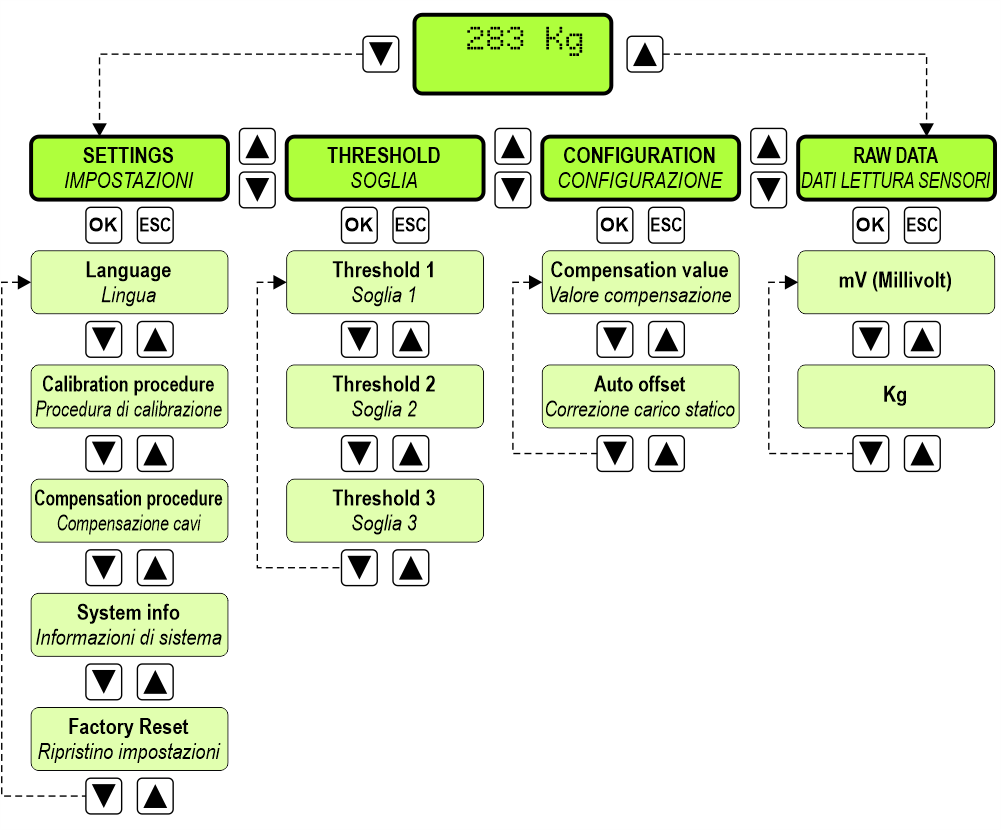
Jos kalibrointia ei ole vielä suoritettu, päävalikkonäytössä näkyy seuraava viesti:
Kalibrointimenettely
- englanti
- italialainen
- saksa
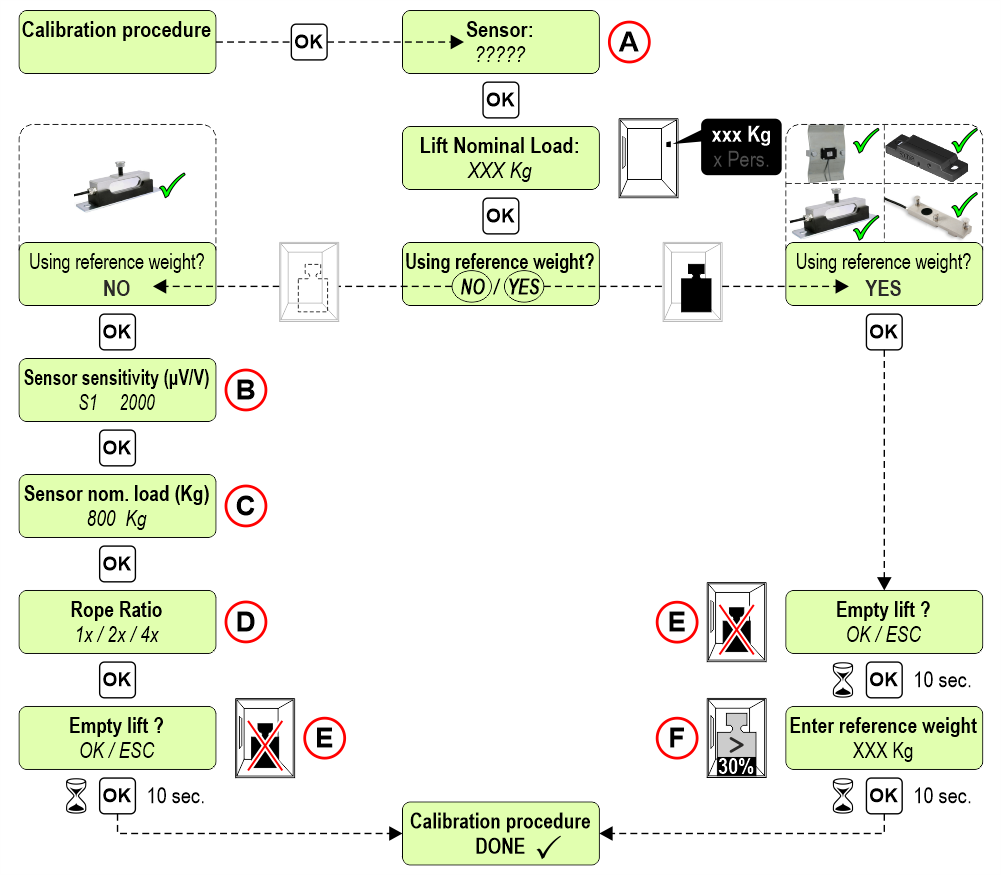
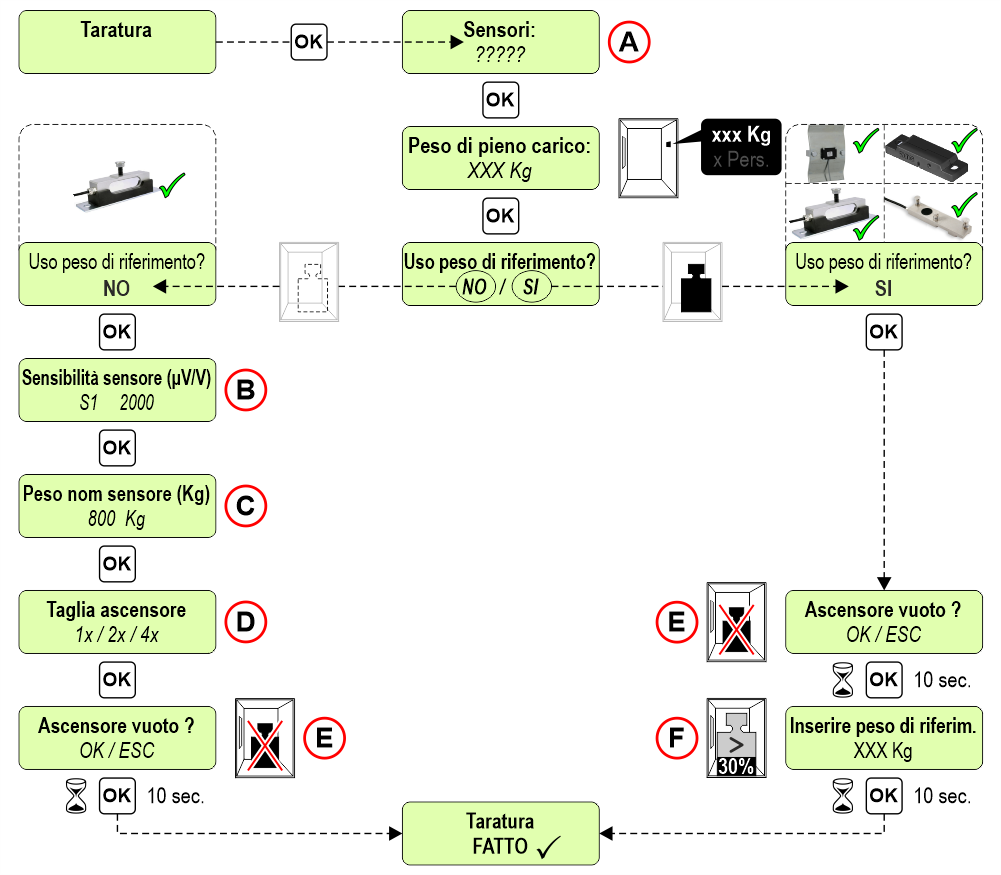
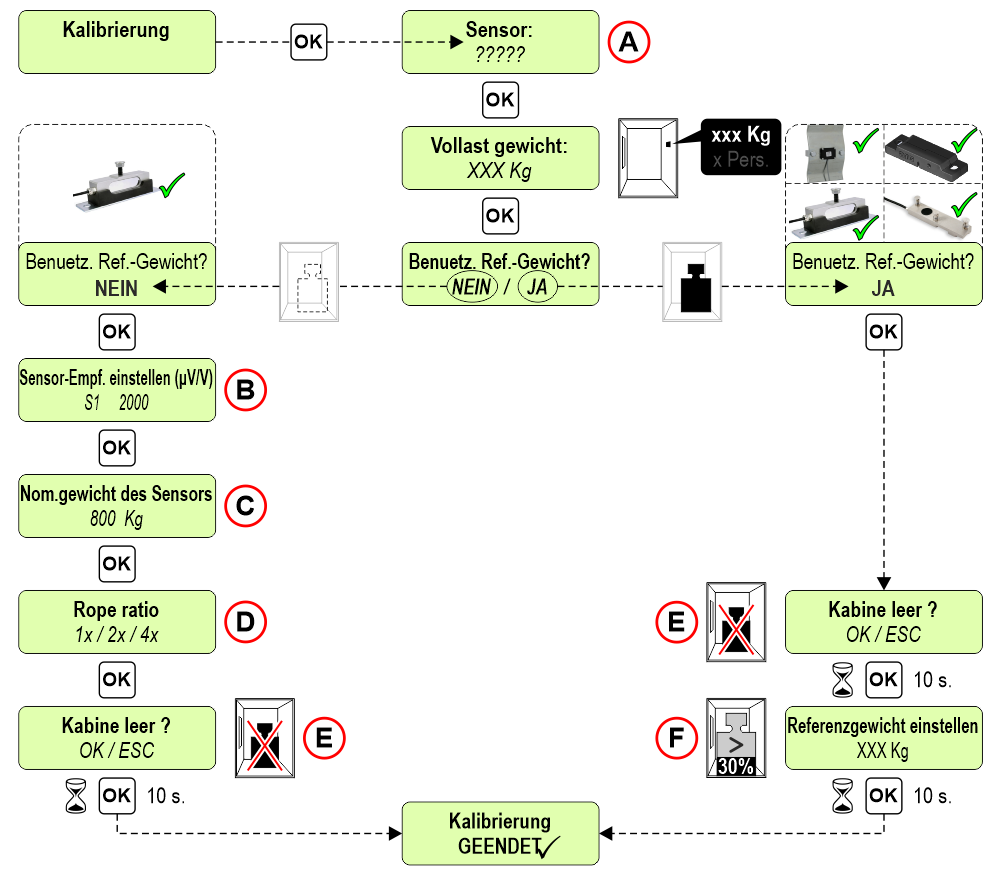
A) Auton pohjassa olevien anturien tai yksittäisten köysianturien osalta pyydetään myös määrä.
B) Syötä kunkin anturin herkkyys (katso anturin etiketti).
C) Syötä anturin nimelliskuormitus.
D) Syötä järjestelmän köysisuhde (jos sitä pyydetään).
E) Kalibroinnin suorittamiseksi hissikori on oltava tyhjä.
F) Aseta hissikorin keskelle paino, joka on vähintään 30 % kapasiteetista. Mitä suurempi paino on, sitä tarkempi kalibrointi on.
Tarkista ylikuormituskynnyksen aktivointi ja auton todellisen painon ja LLEC7-laitteessa ilmoitetun painon vastaavuus (± 5 %).
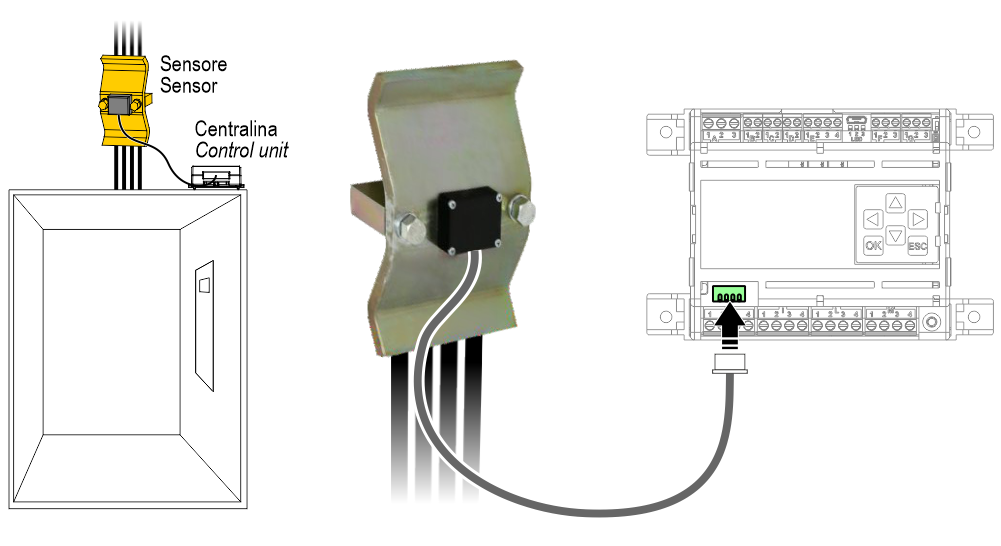
Liikkuvan kaapelin kompensointimenettely
Ennen tämän toimenpiteen suorittamista kalibroi järjestelmä ja kytke AUT.KIT08-magneettisensoripakkaus (§ Anturien kytkeminen liikkuvan akselin kaapelikompensointia varten).
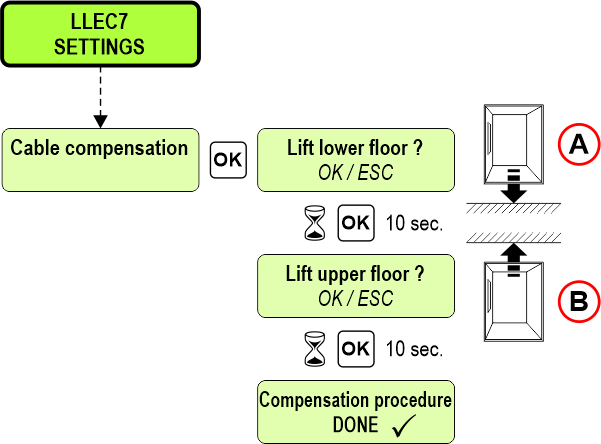
A) Siirrä auto alemmalle kerrokselle.
B) Siirrä auto ylemmälle kerrokselle.
Kynnysarvojen asettaminen
Jokaiselle kynnykselle on mahdollista asettaa arvo (kg) ja kosketintyyppi (normaalisti avoin / normaalisti suljettu).
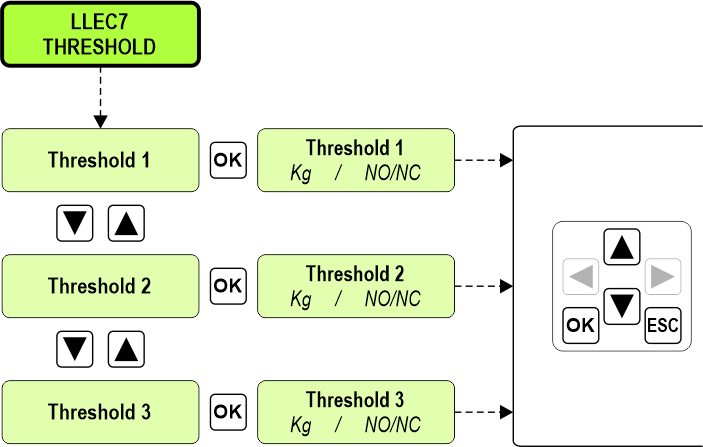
Oletusarvot:
Kynnysarvo 1: 25 % hissin nimelliskuormasta / normaalisti auki
Kynnysarvo 2: 100 % hissin nimelliskuormasta / normaalisti auki
Kynnysarvo 3: 115 % hissin nimelliskuormasta / normaalisti auki
LED-valo syttyy, jos kynnysarvo on aktiivinen.
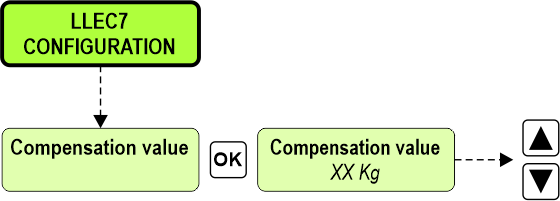
Liikkuvan akselin kaapelikompensaatioarvon manuaalinen asetus
Liikkuvan kaapelin kompensointimenettelyllä havaittua arvoa on mahdollista muokata manuaalisesti.
Kunkin anturin painon ja jännitteen näyttö
Hyödyllinen ominaisuus:
• Tarkista painon jakautuminen ohjaamossa
• Tarkista, onko järjestelmässä eri jännitteisiä köysiä
• Tarkista, mikä anturi ei toimi
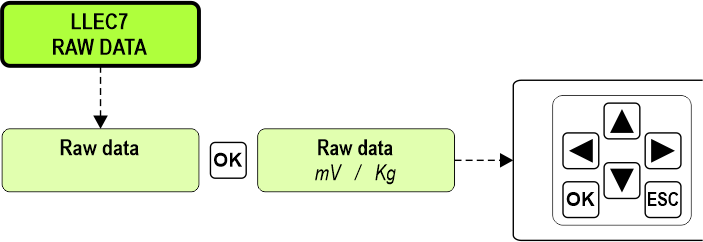
Näytä kunkin anturin paino (kg) ja jännite millivolttina (mV).
.
Tuoteseloste

| LLEC7 elektroninen ohjausyksikkö | |
|---|---|
| Jännite | 12/24 V DC |
| Maksimi imeytyminen | 200 mA |
| Releiden lähtö 1/2/3 | 1 A, 30 V DC (resistiivinen kuorma) |
| Kuormituksen lukitustulo | Kuiva kosketus |
| Käyttölämpötila | -10 °C ~ +50 °C |

| Auton pohja-anturi | |
|---|---|
| Alue | 800 kg |
| Tuloimpedanssi | 1030 ± 10 Ω |
| Lähtöimpedanssi | 1000 ± 2 Ω |
| Eristysimpedanssi | ≥ 5000 MΩ |
| Turvallinen ylikuormitus | 150 % F.S |
| Äärimmäinen ylikuormitus | 200 % F.S |
| Lämpötilan vaikutus | ± 0,02 % F.S/10 °C |
| Käyttölämpötila | -30 °C ~ +70 °C |
| Suojausluokka | IP67 / IP68 |
| Kaapelin pituus | 6 mt |

| Yksittäinen köysianturi | |
|---|---|
| Nimelliskuorma | 750 kg (köydet 6–8 mm) / 1000 kg (köydet 9–11 mm) / 1000 kg (köydet 12–15 mm) |
| Nimellisteho | 0,5 ~ 2,0 ± 0,1 mV/V |
| Tuloimpedanssi | 350 ± 20 Ω |
| Lähtöimpedanssi | 350 ± 3 Ω |
| Eristysimpedanssi | ≥ 5000 MΩ / 100 VDC |
| Suositeltu viritys | 3,3 V |
| Maksimiheräte | 15 V |
| Turvallinen ylikuormitus | 150 % F.S |
| Äärimmäinen ylikuormitus | 200 % F.S |
| Lämpötilan vaikutus | ± 0,5 % F.S/10 °C |
| Käyttölämpötila | -20 °C ~ +80 °C |
| Suojausluokka | IP66 |
| Kaapelin pituus | 2 mt |
Vianmääritys
| Ongelma | Ratkaisu |
|---|---|
| Laite ilmoittaa virheestä kalibrointimenettelyn lopussa. | Tarkista anturien oikea kytkentä. |
| Laite ilmoittaa virheestä kompensointimenettelyn lopussa. | Tarkista magneettisten anturien oikea kytkentä. |
| Autossa havaittu paino ei näytä olevan oikea. | Tarkista kaikki anturit, tarkista paino ja lähtöjännite. (katso valikko ”Raakadata”). |
Käyttövinkkejä
- Uusissa asennuksissa on suositeltavaa toistaa kalibrointi jonkin ajan kuluttua, koska hissin kitkan väheneminen voi häiritä LLEC7-laitteen oikeaa toimintaa.
- Anturikaapeleiden pituutta ei ole suositeltavaa muuttaa, koska se voi vaikuttaa niiden tehtaalla asetettuun herkkyyteen.
- Ennen kalibrointimenettelyn suorittamista tarkista, että autossa ei ole kitkaa ohjaimien kanssa.
- Jos käytetään auton pohjan tyhjiä antureita, punnituksen tarkkuutta ei voida taata.
Download
| Viite | Versio | Linkki |
|---|---|---|
| 1.2 | Download (englanti) | |
| Yhteys Pitagora 4.0 -ohjaimeen | 1.3 | Download (englanti) |
| Päivitetyt kauppalait | 1.4 | Download (englanti) |
| Pura ohjeet | 1.5 | Download (englanti) |
| magneettisten anturien liitäntä liikkuvan kaapelin kompensointia varten | 1.6 | |
| Versio yhdellä köysianturilla | 1.7 | Download (englanti) |
| Auton rungon anturin sijainti | 1.8 | Download (englanti) |
| LLEC7 + Pitagora 4.0 -ohjain | 1.9 | Download (englanti) |
| Köysien anturikoodit | 2.0 (nykyinen versio) |