(v 1.9)

Sikkerheds- og brugsadvarsler
Inden du installerer vores produkter, anbefaler vi, at du læser afsnittet om sikkerhed og brugsforholdsregler på nedenstående link.

Hovedfunktioner
- 3 relægrænser + analog udgang.
- Automatisk kompensation af elevatorens dynamiske belastning under kørsel (belastningslåseindgang).
- Den kan styre op til 8 individuelle sensorer.
- Justerbar kompensation af kabelvægt på bevægelig aksel.
- Visning af vægten og udgangsspændingen for hver enkelt sensor.
- IPX3-beskyttelse gennem det udvendige dæksel.
- Enhedsadministration via Fusion-appen i lokal forbindelse.
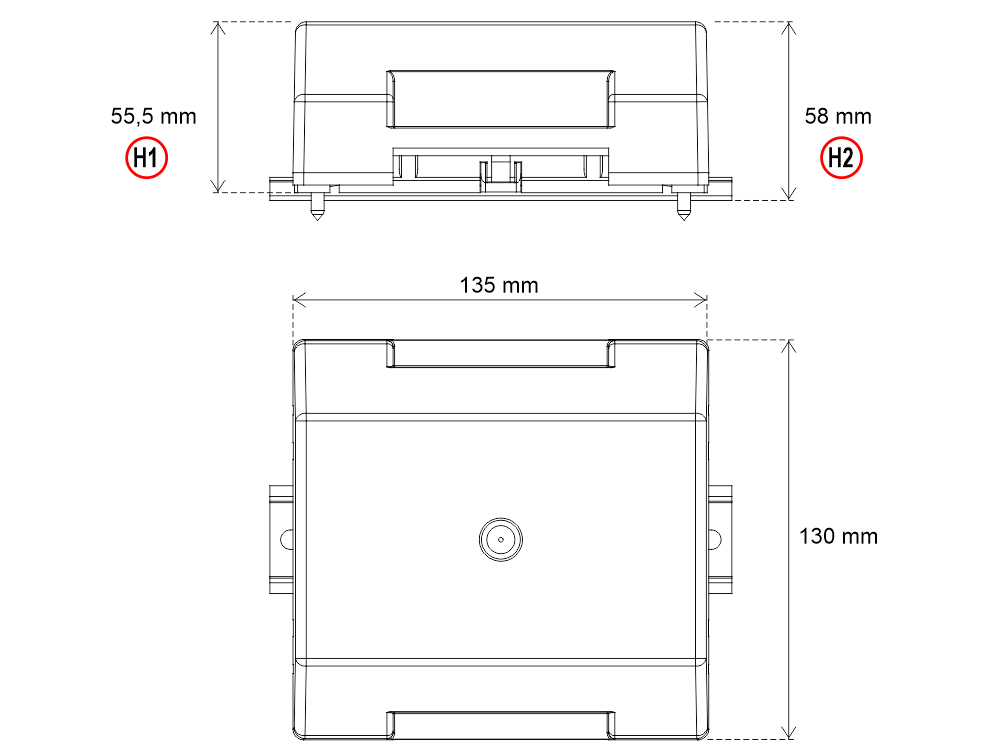
H1 – Fastgørelse med skruer
H2 – DIN-skinnefastgørelse
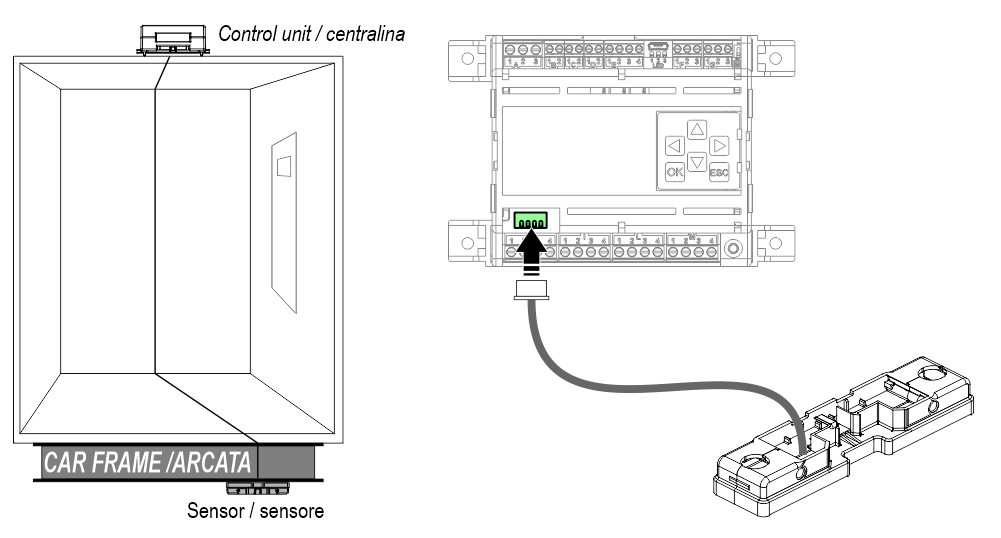
Systemkomponenter
LLEC7 elektronisk styreenhed + eksterne sensorer
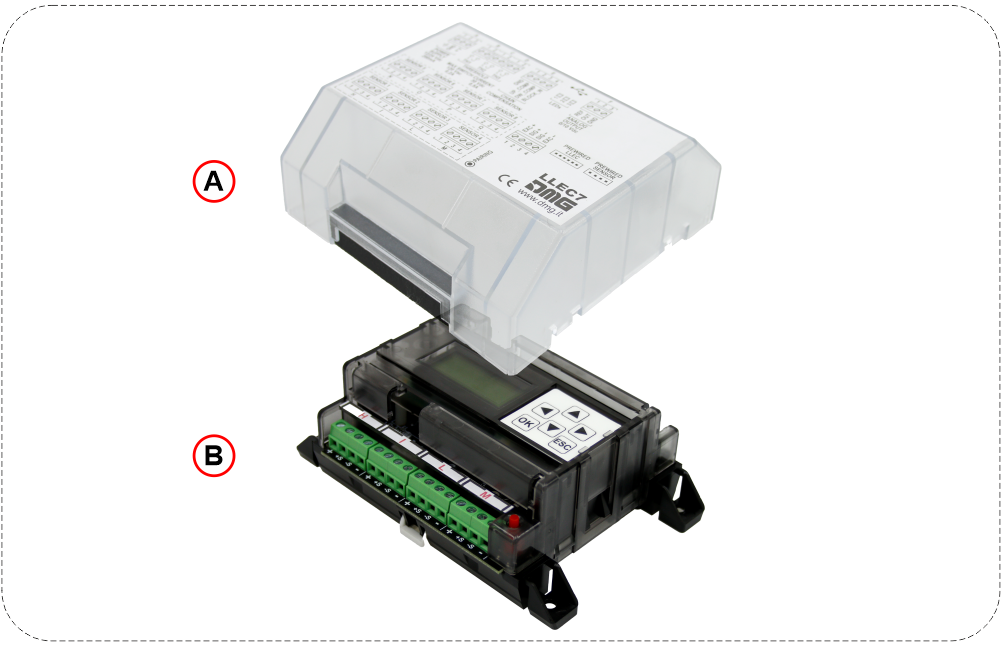
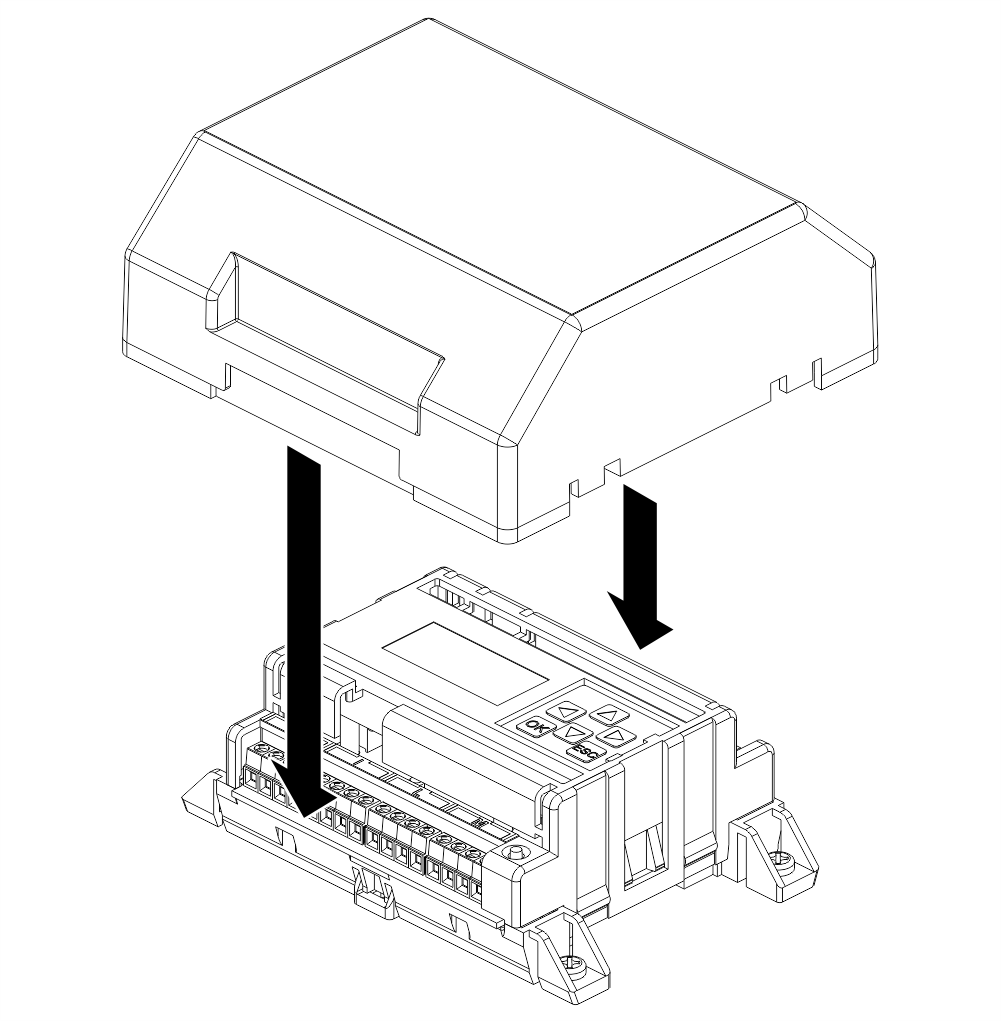
A) – Eksternt vandbeskyttelsesdæksel (IPX3)
B) – LLEC7 elektronisk styreenhed
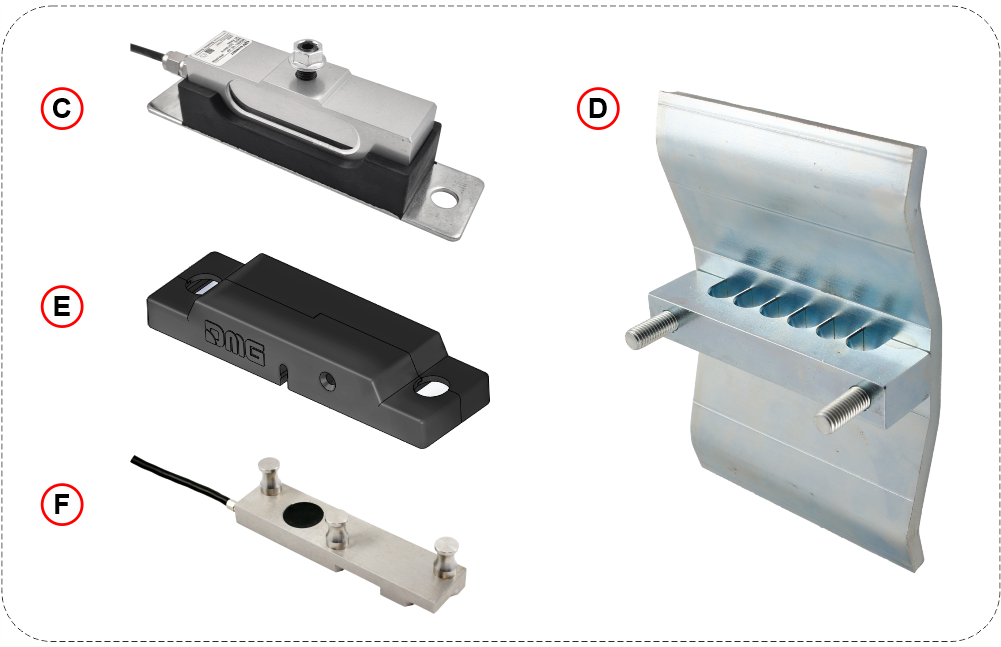
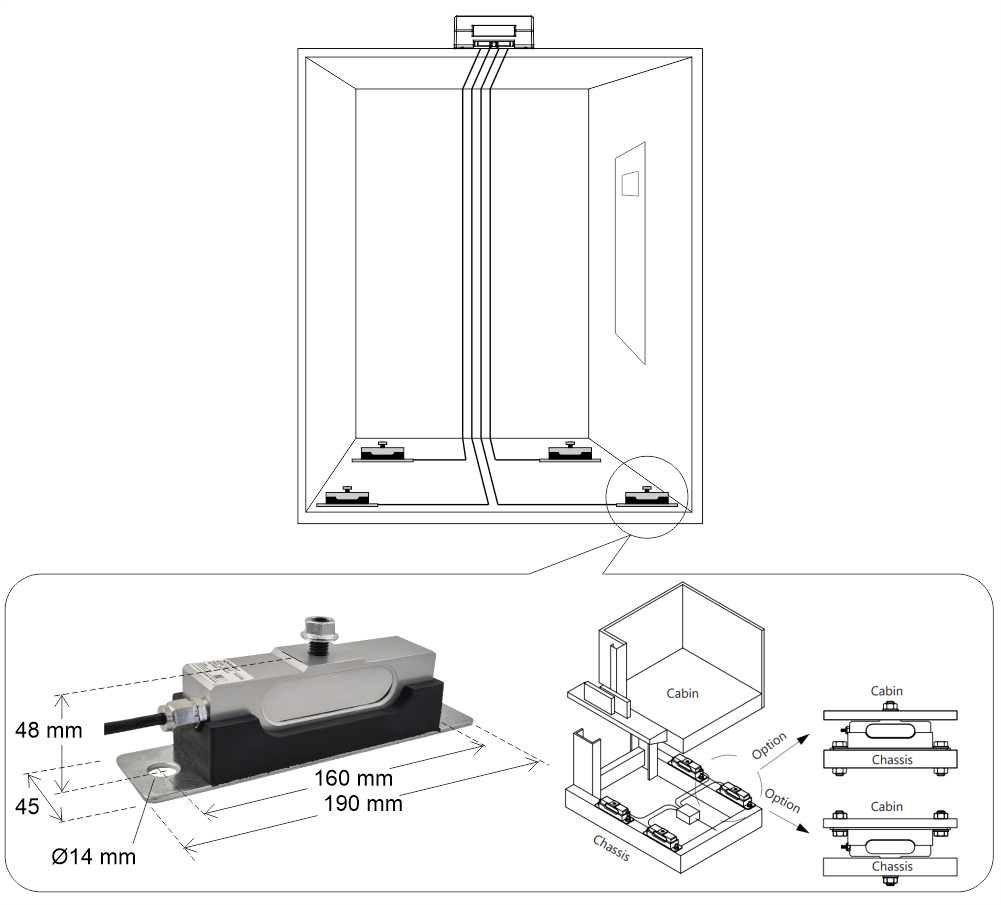
C) – Eksternt sensorsæt til elevatorens bund (6 m kabel)
D) – Ekstern sensor til reb
E) – Ekstern sensor til kabineramme
F) – Ekstern sensor til enkelt reb
Valgfrie komponenter
 kode [AUT.KIT08] – Magnetiske sensorer (NC)
kode [AUT.KIT08] – Magnetiske sensorer (NC)
 kode [EWS.AL212] – Strømforsyning 220 V
kode [EWS.AL212] – Strømforsyning 220 V
Styring via Fusion APP

DMG Fusion-appen, der er forbundet via Bluetooth® til LLEC7, giver dig mulighed for at udføre alle de procedurer, der findes på enheden.
Det er ikke nødvendigt at logge ind.
Mobilappens grænseflade er en nøjagtig kopi af tastaturet og LCD-skærmen på LLEC7, hvilket gør det muligt for installatøren at udføre alle operationer uden at interagere direkte med enheden.
Installation, parring og brug
Download installer Fusion-appen ved hjælp af QR-koden til siden.

 | 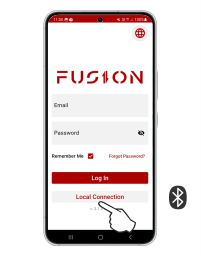 | 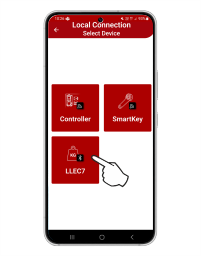 |
| Hold nede (5 sek.) | Du kan få adgang til enheden lokalt uden at logge ind (vælg "Lokal forbindelse"). | Vælg den type enhed, der skal administreres (LLEC7). |
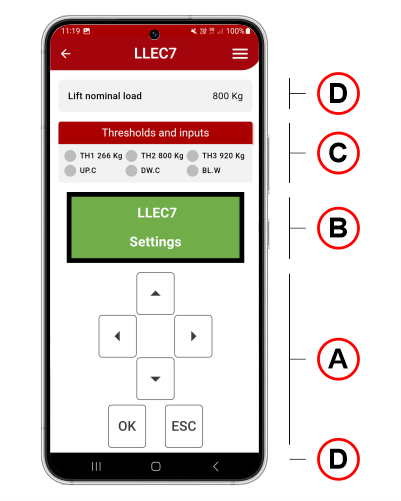
A) Programmeringstastatur
B) LCD-display
C) Status og tærskelværdier / status for indgangene til kompensation (UP.C, DW.C) og vægtblok (BL.W)
D) Vises også (øverst og nederst på skærmen):
• De værdier, der er indtastet under kalibreringen, såsom løftebelastning, antal og type sensorer, systemets rebforhold.
• Enhedens HW- og SW-version.
Installation
LLEC7 elektronisk styreenhed fastgørelse
– Fastgørelse med skruer –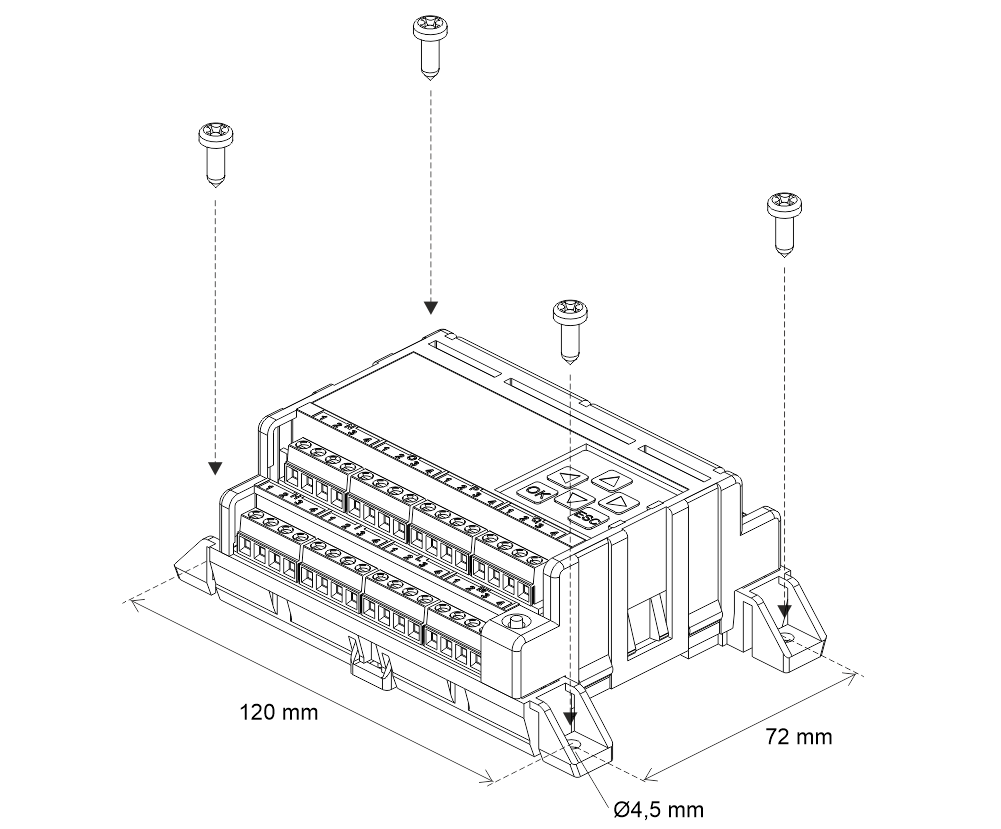
– DIN-skinnefastgørelse –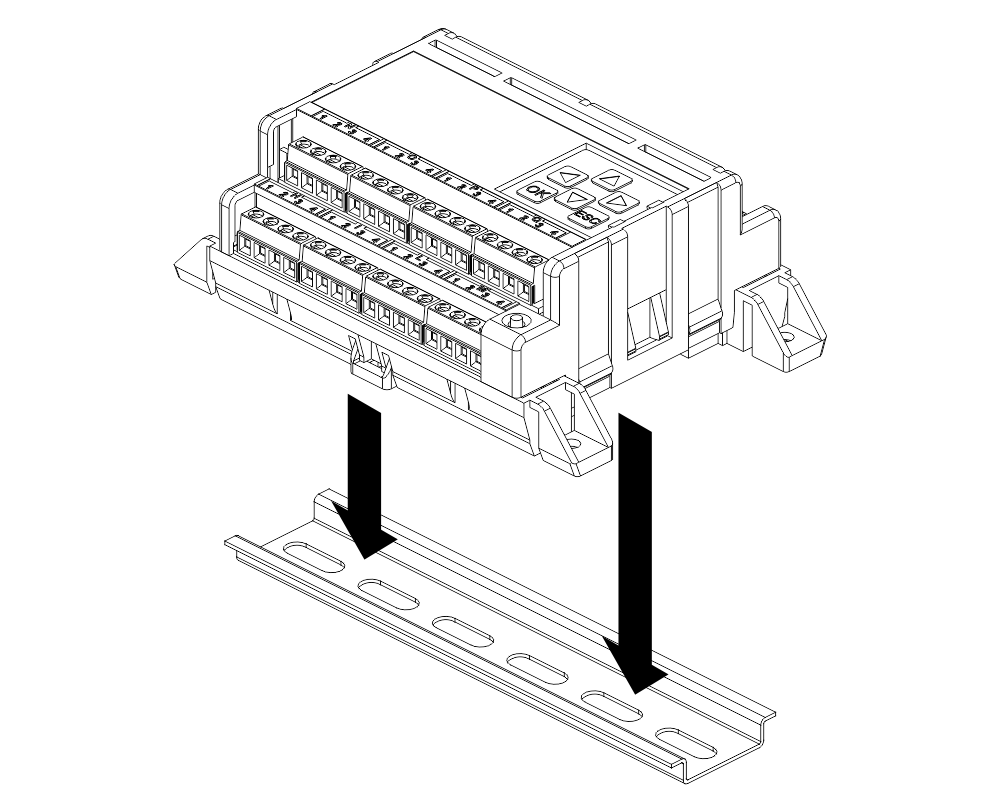
– Installation af eksternt beskyttelsesdæksel –
Montering af sensorer i bilens bund
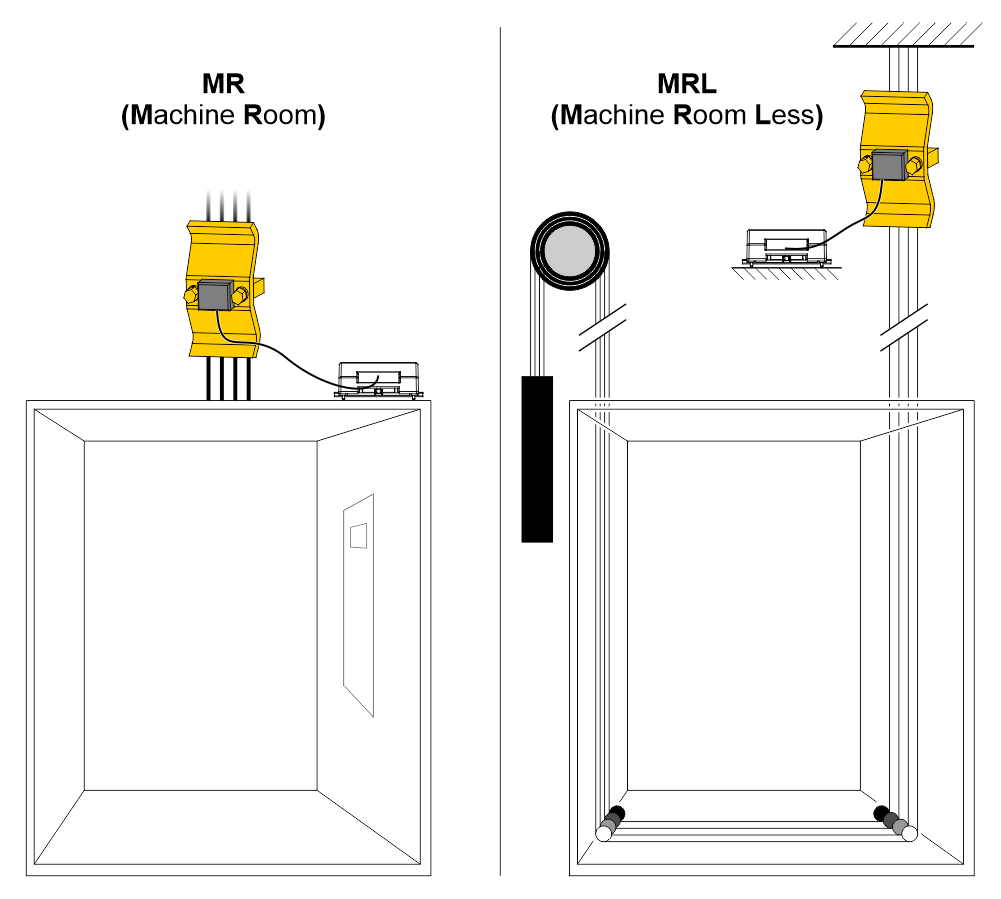
Installation af rebssensor
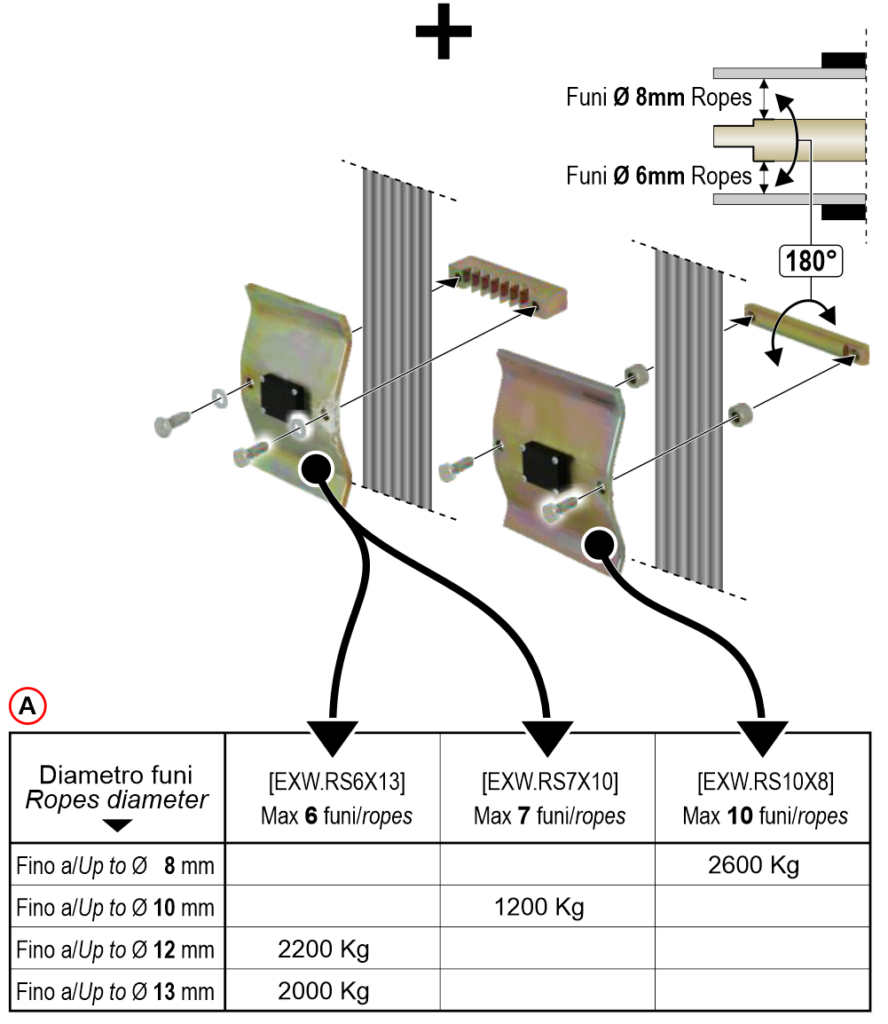
A) – Tabel over maksimal belastning (massestruktur + løftekapacitet)
Ved løfteforhold 2:1 (sensor på fast ende + trisse) fordobles den maksimale belastning.
Installation af enkelt reb-sensor
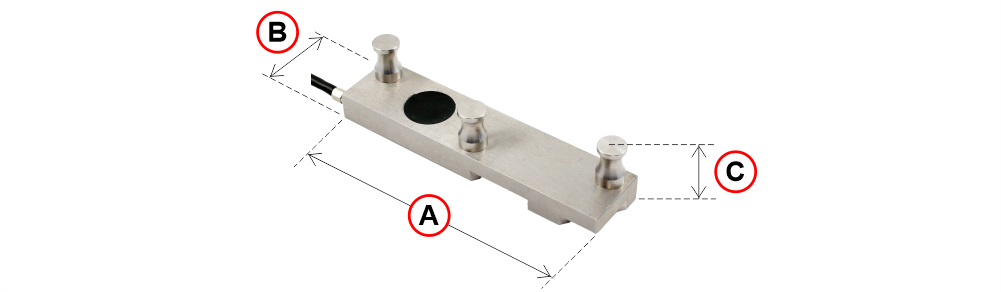
| Sensorens nominelle belastning | A | B | C |
| 750 kg (reb 6~8 mm) | 87 mm | 20 mm | 21,5 mm |
| 1000 kg (reb 9~11 mm) | 120 mm | 28 mm | 28,5 mm |
| 1000 kg (reb 12~15 mm) | 132 mm | 36 mm | 33,5 mm |
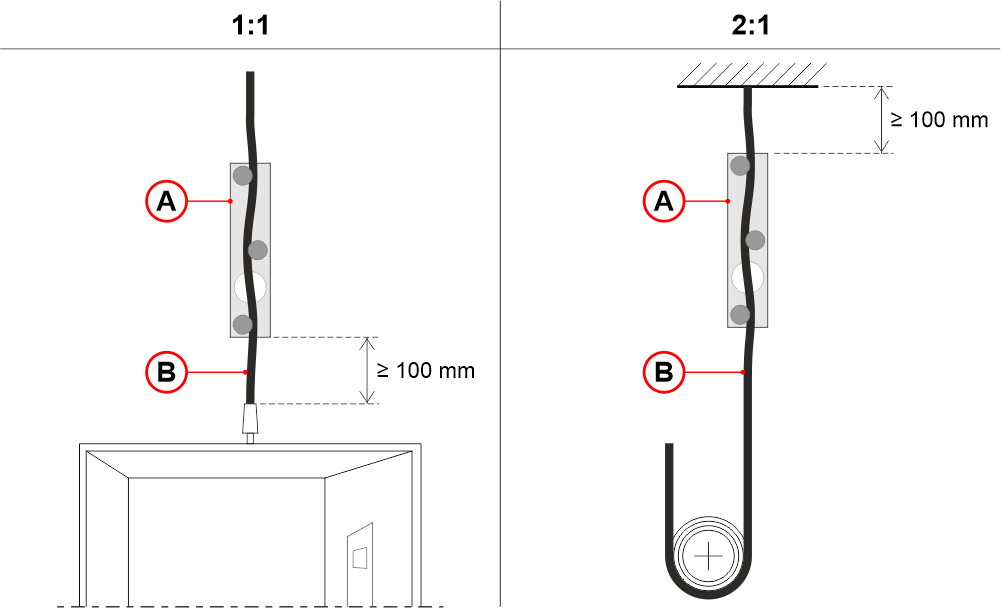
A) Enkelt reb sensor
B) Enkelt reb
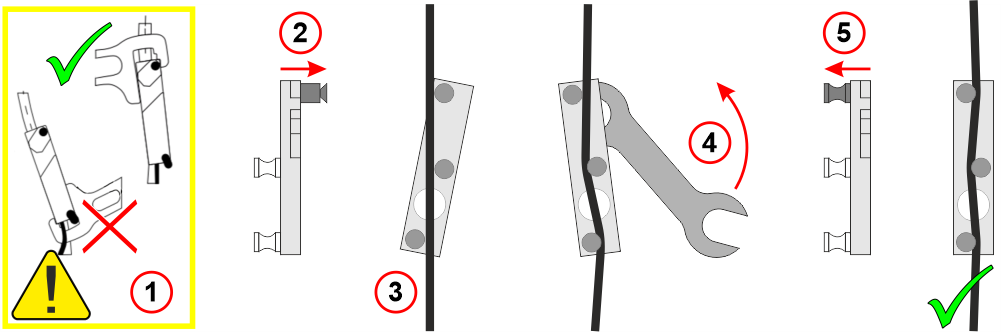
Følg ovenstående trin og sørg for at bruge den medfølgende skruenøgle på den øverste del af sensoren (4), da der er risiko for at skære kablet over på den nederste del.
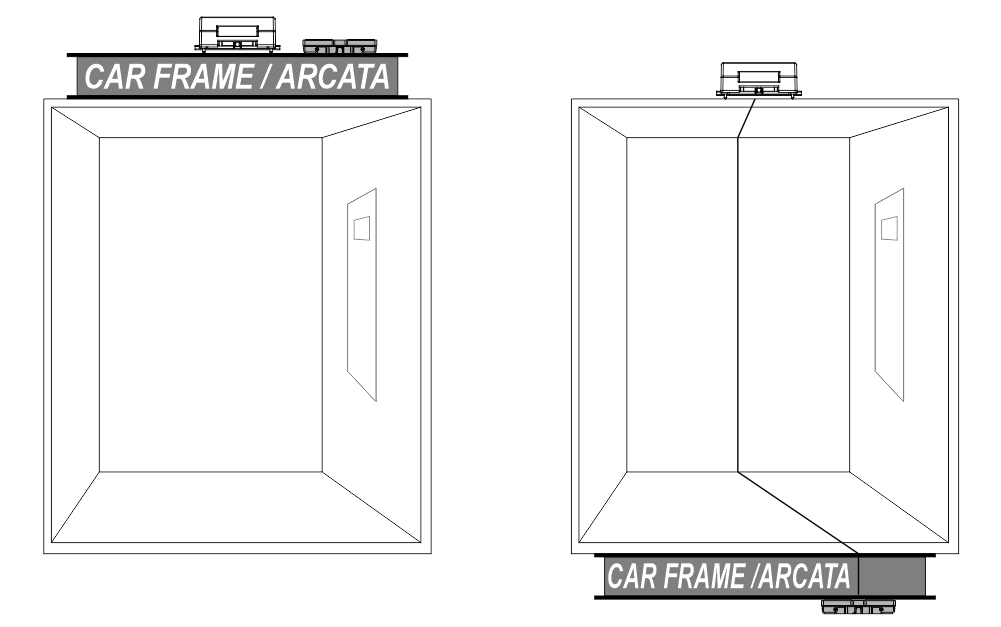
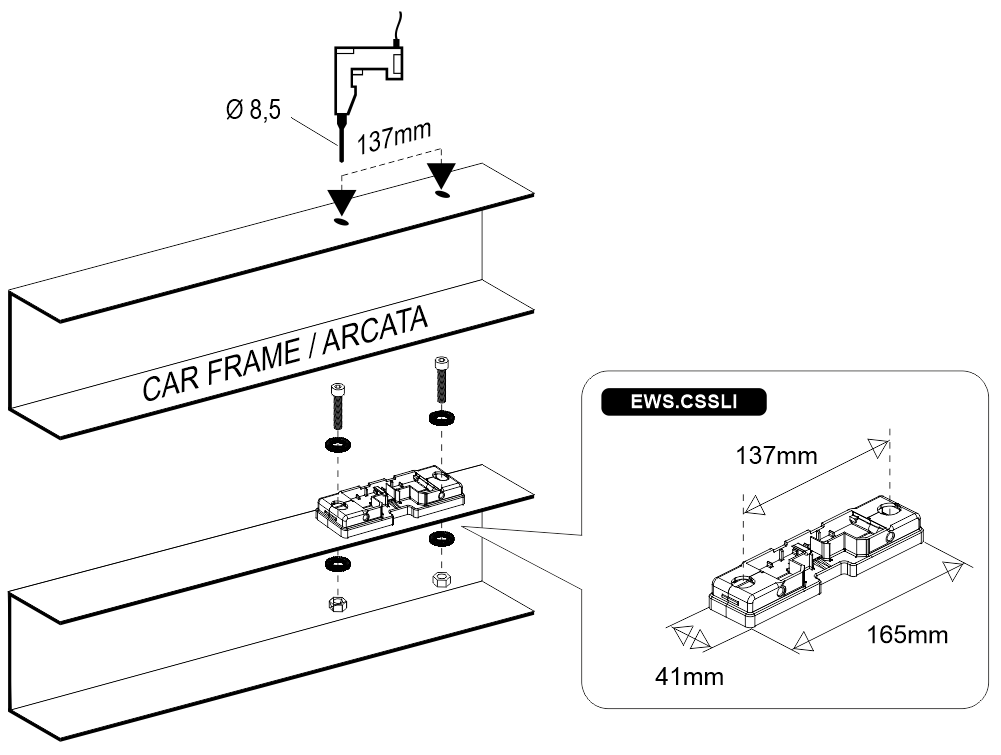
Montering af bilrammesensor
Instruktioner til kabelføring
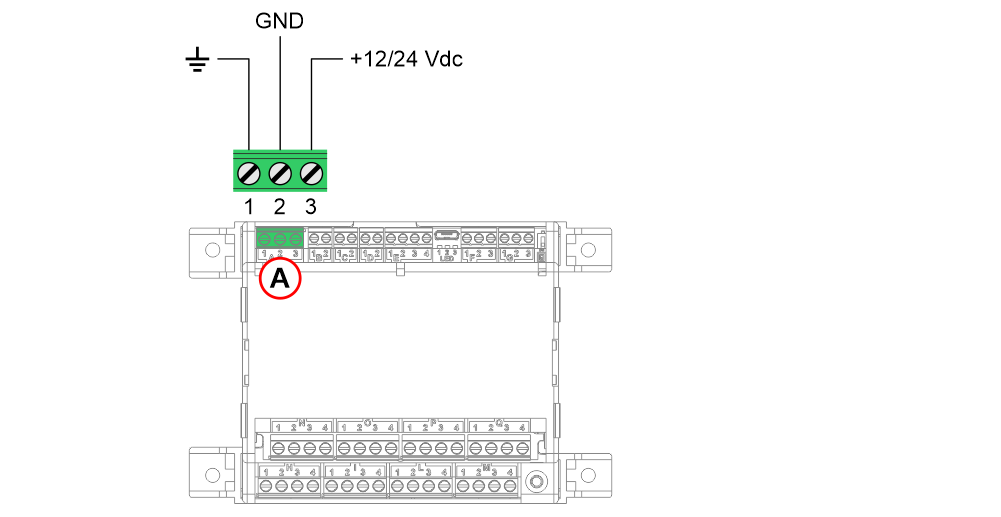
Generel beskrivelse af konnektorerne
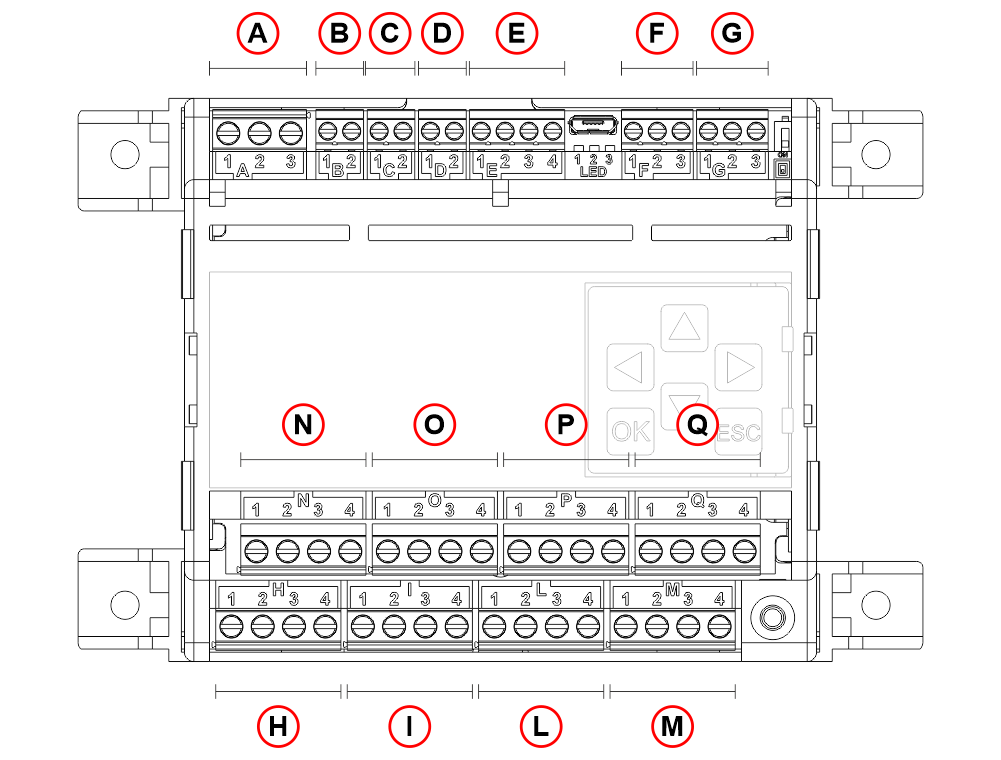
- A – Strømforsyningsindgang
1 – Jord
2 – GND
3 – +12/24 Vdc - B – Tærskel 1 (som standard 50 % af elevatorens nominelle belastning)
1 – COM
2 – NO - C – Tærskel 2 (som standard 100 % af elevatorens nominelle belastning)
1 – COM
2 – NO - D – Tærskel 3 (som standard 115 % af elevatorens nominelle belastning)
1 – COM
2 – NO - E – Indgang til kompensation af bevægeligt kabel / Indgang til blokvægt
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – BLOC_W - F – Analog udgang
1 – REF
2 – OUT
3 – GND - G – CAN-indgang (BRUGES IKKE)
1 – CAN_L
2 – CAN_SHLD
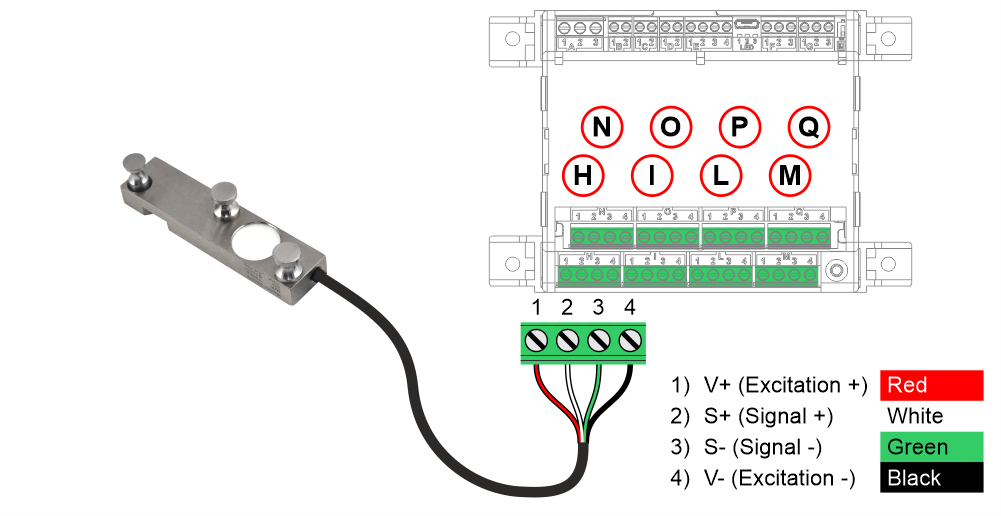
3 – CAN_H - H / I / L / M – Sensorindgang 1 / 2 / 3 / 4
N / O / P / Q – Sensorindgang 5 / 6 / 7 / 8
1 – V+ (Excitation +)
2 – S+ (Signal +)
3 – S- (Signal -)
4 – V- (Excitation -)
Strømforsyningsindgang
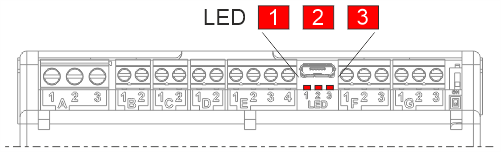
Tilslutning af tærskler
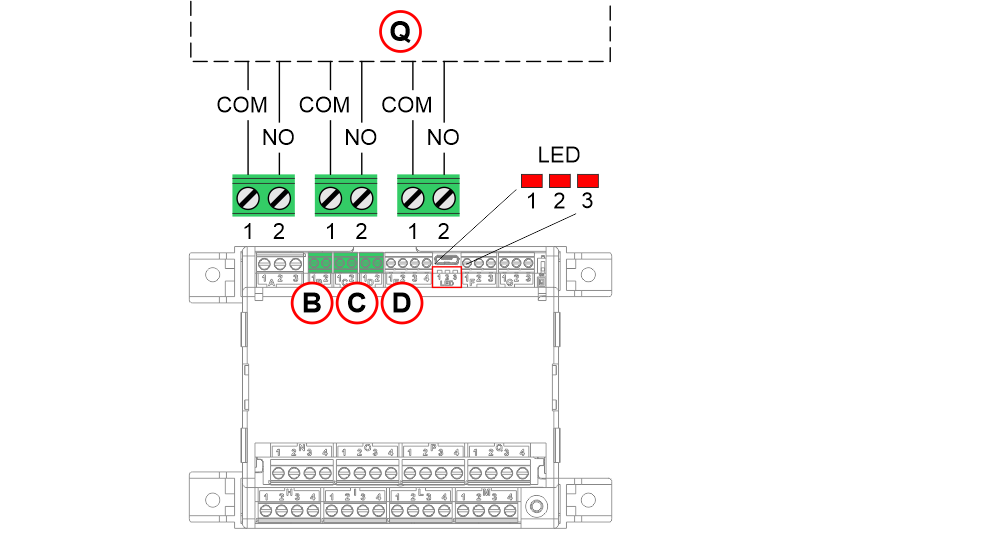
- B) – Tærskel 1 (som standard 25 % af elevatorens nominelle belastning)
1 – COM
2 – NO - C) – Tærskel 2 (som standard 100 % af elevatorens nominelle belastning)
1 – COM
2 – NO - D) – Tærskel 3 (som standard 115 % af elevatorens nominelle belastning)
1 – COM
2 – NO - Q) – Controller
- Tærskel-LED – LED'en lyser, hvis tærsklen er aktiv.
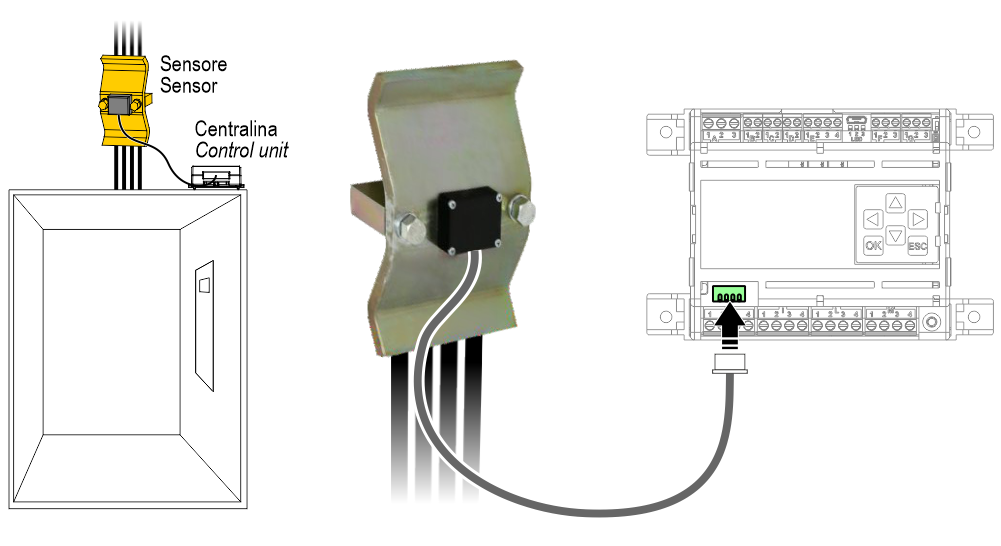
LLEC7 + Pitagora 4.0-controller
Forbindelsen til Pitagora 4.0-systemet sker via TOC-boksen, der er placeret øverst i kabinen.
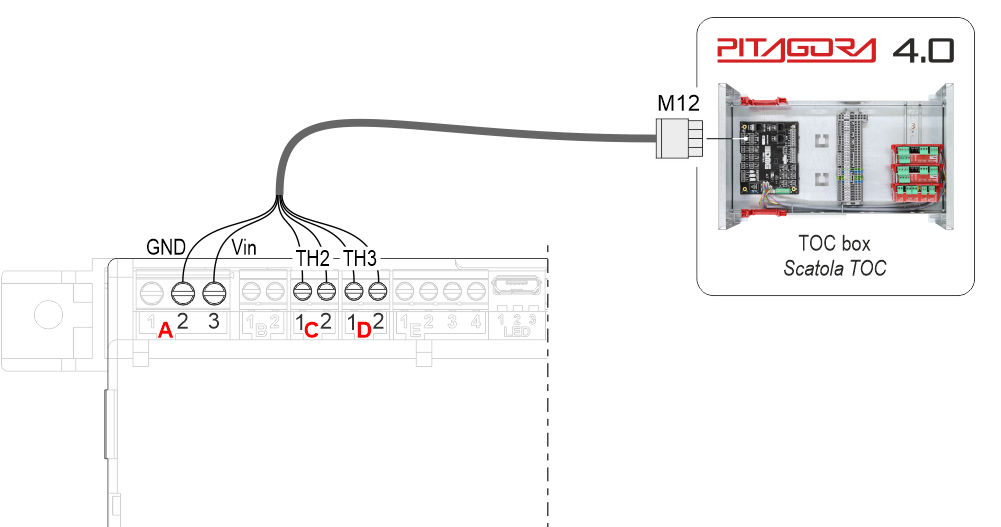
Kablet forsyner ikke kun LLEC7 med strøm, men indeholder også tærsklerne TH2 (fuld bil 100 %) og TH3 (overbelastning 115 %).
LLEC7 + NON-DMG-controller
Den nedenfor viste tilslutning understøtter op til 8 sensorer.
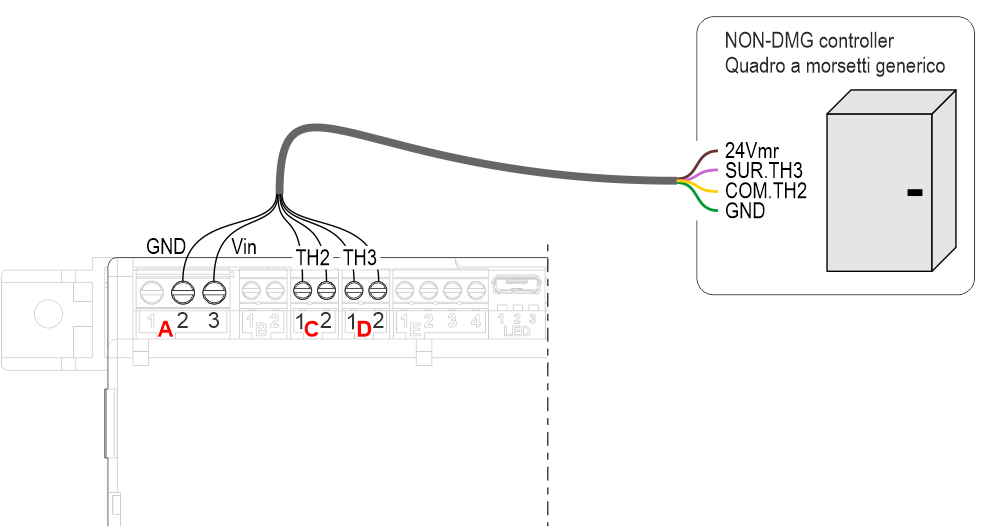
Kablet (medfølger ikke enheden) forsyner ikke kun LLEC7 med strøm, men indeholder også tærsklerne TH2 (fuld bil 100 %) og TH3 (overbelastning 115 %).
Tilslutning af sensorer til kompensation af bevægelige akselkabler
I elevatorer med tung kabeltvægt er kompensation et vigtigt skridt. Vigtigt at vide:
1) Elevatorens maksimale belastning.
2) Kabeltvægt pr. meter.
3) Skaktens samlede længde.
Inden denne procedure udføres, skal den eksterne positionssensor [AUT.KIT08] tilsluttes ud over de primære tilslutninger.
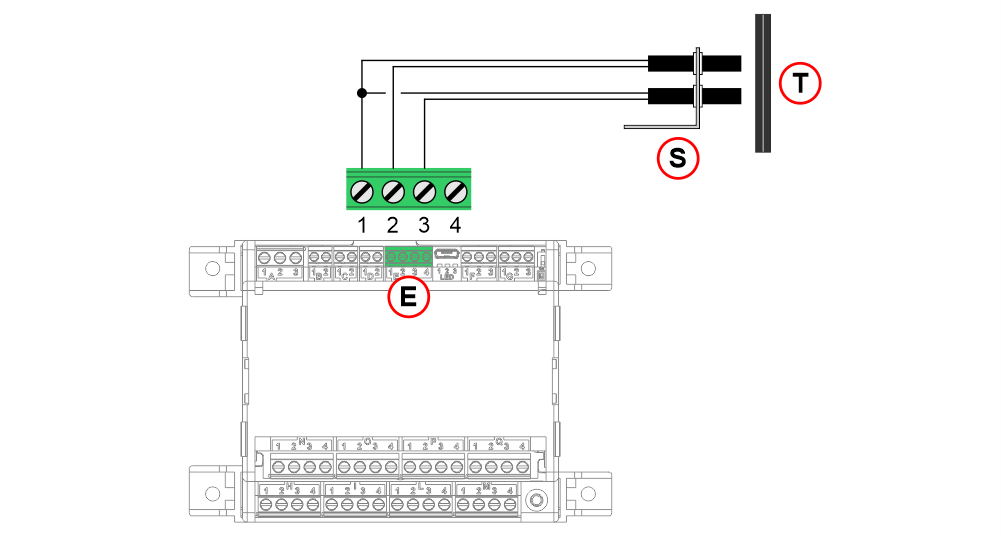
- E – Indgang til kompensation af kabeltab
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – X (Se funktionen vægtslås) - S – Positionssensorer på toppen af kabinen
- T – 1 magnet på hver etage
Tilslutning af vejningslåsfunktionen
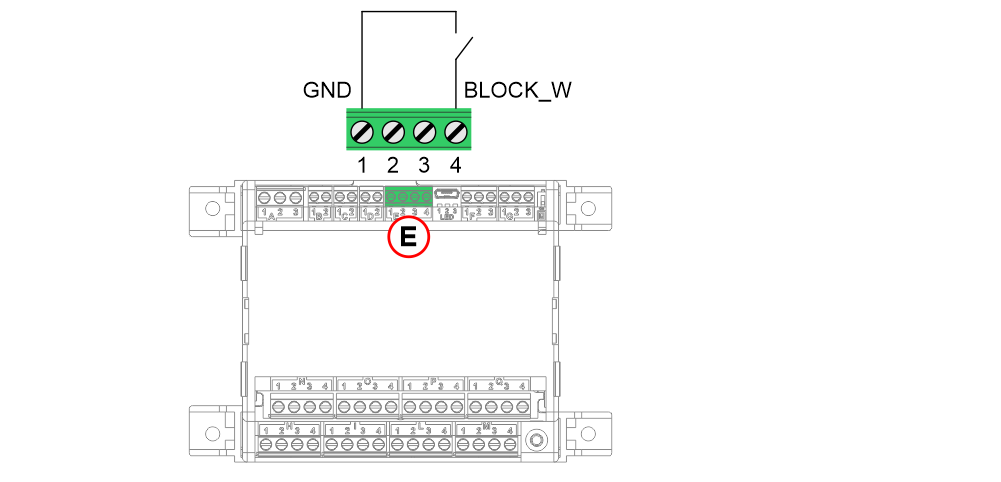
- E – Blokvægtindgang
1 – GND
2 – X
3 – X
4 – BLOCK_W

Indgangen må ikke tilsluttes direkte til sikkerhedskredsløbet.
Tilslutning af elevatorens bundsensorer
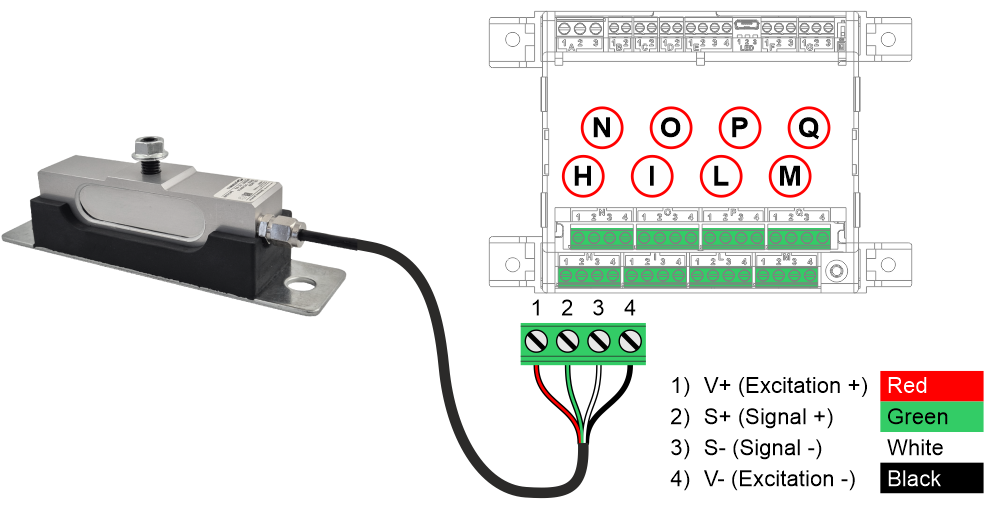
- H / I / L / M – Sensorindgang 1 / 2 / 3/4
N / O / P / Q – Sensorindgang 5 / 6 / 7 / 8 (kun med valgfrit udvidelseskort)
1 – V+ (Excitation +) tilsluttet det røde kabel
2 – S+ (Signal +) tilsluttet det grønne kabel
3 – S- (Signal -) tilsluttet det hvide kabel
4 – V- (Excitation -) tilsluttet det sorte kabel
Forbindelseskablets længde er 6 m.
Tilslutning af rebets sensor
Tilslutning af enkeltrebssensor
- H / I / L / M – Sensorindgang 1 / 2 / 3 / 4
N / O / P / Q – Sensorindgang 5 / 6 / 7 / 8 (kun med valgfrit udvidelseskort)
1 – V+ (Excitation +) tilsluttet det røde kabel
2 – S+ (Signal +) tilsluttet det hvide kabel
3 – S- (Signal -) tilsluttet det grønne kabel
4 – V- (Excitation -) tilsluttet det sorte kabel
Tilslutning af bilrammesensor
Programmering
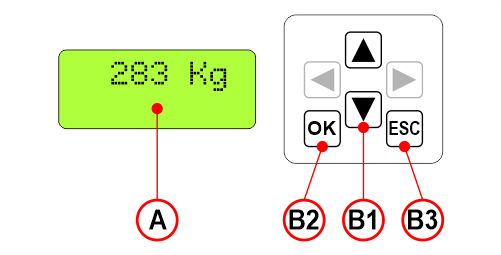
Visning efter kalibrering
A) Aktuel vægt registreret i elevatorvognen.
Programmeringstastatur
B1) Gennemse indstillinger på det aktuelle niveau.
B2) Åbn menuen og bekræft valget.
B3) Afslut det aktuelle niveau og vend tilbage til det forrige niveau.
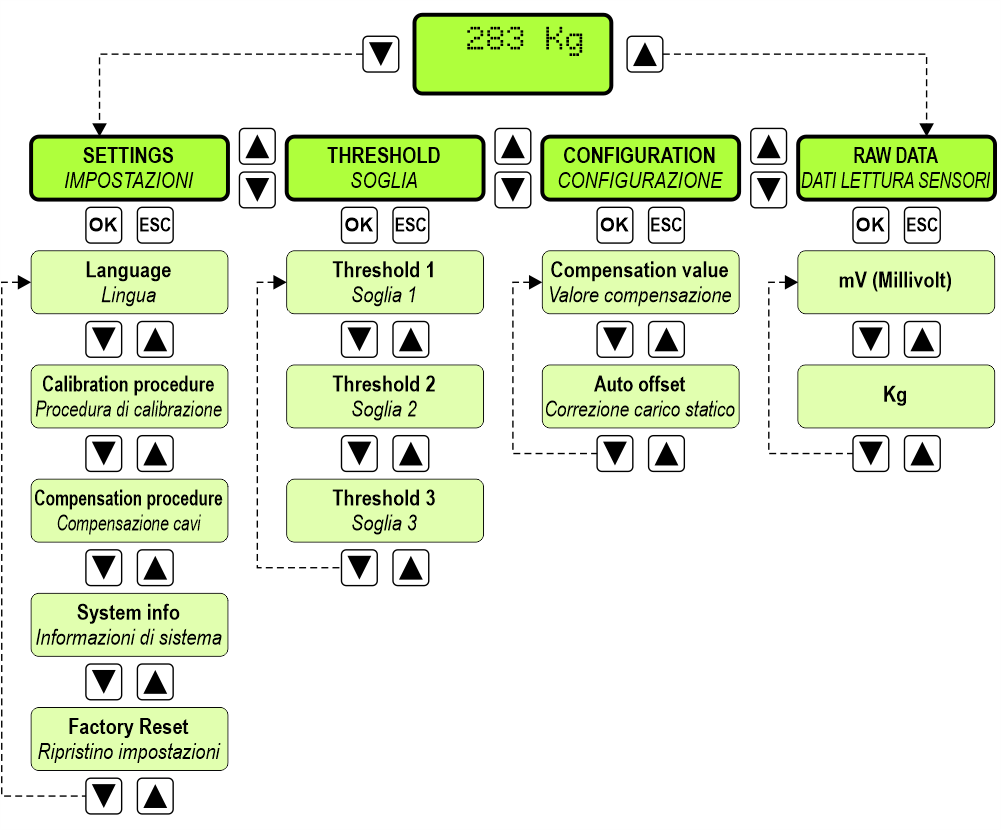
Programmeringsmenukort
Hvis kalibreringsproceduren endnu ikke er udført, vises følgende meddelelse på hovedmenuskærmen:
Kalibreringsprocedure
- Engelsk
- italiensk
- Tysk
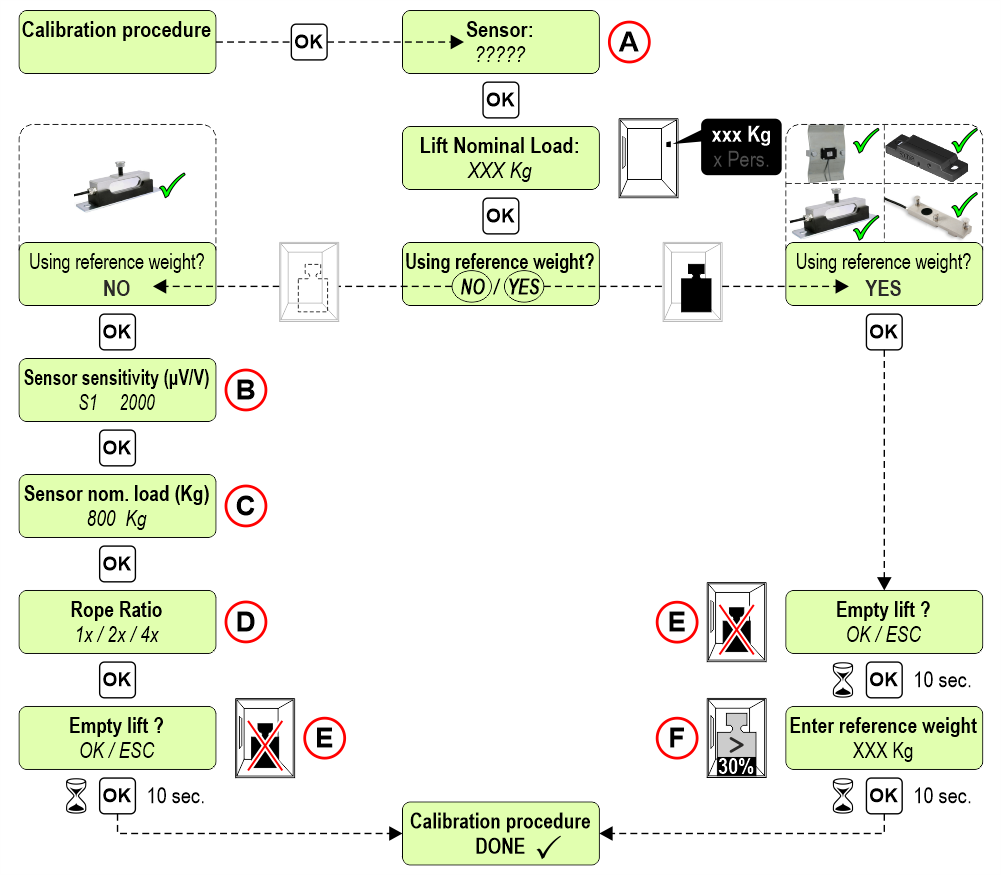
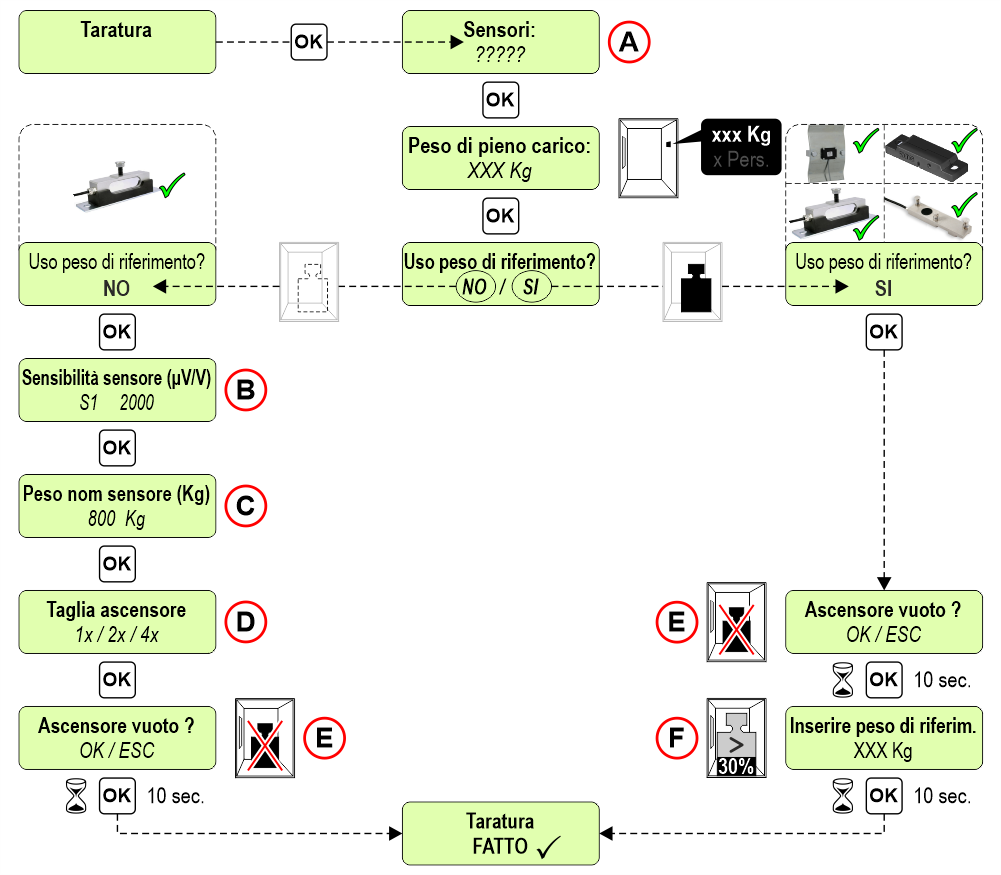
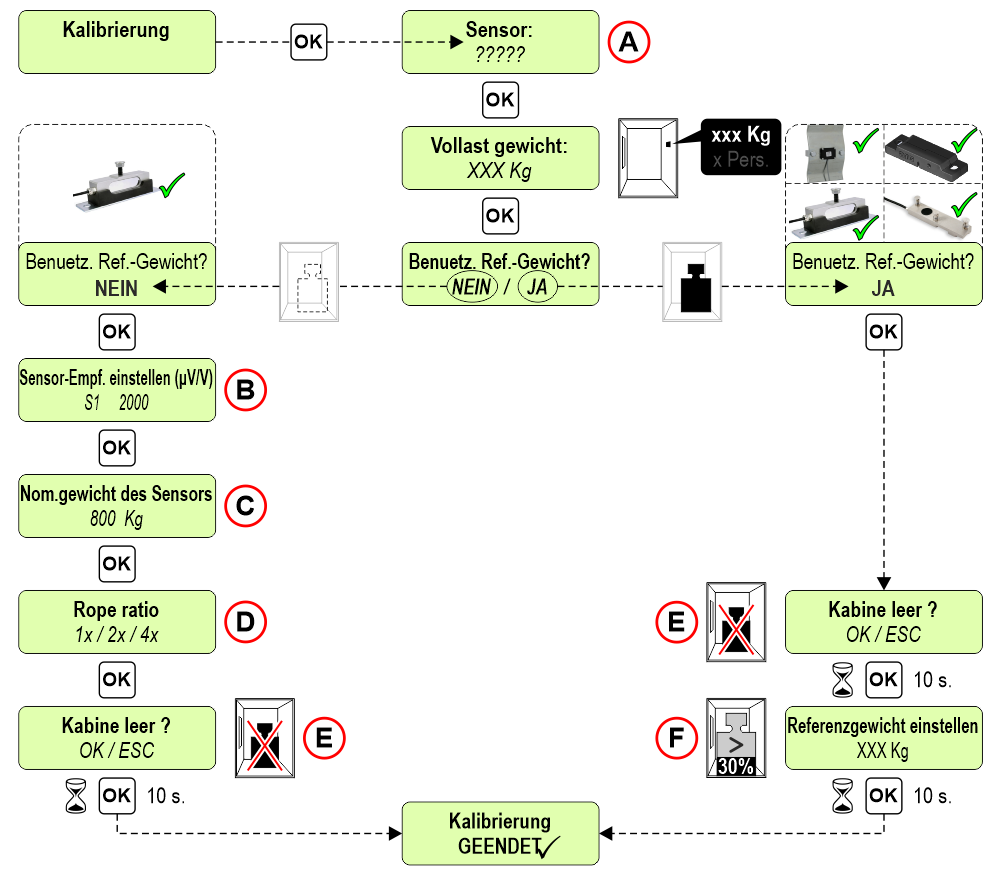
A) For sensorer til bilbund eller enkelt reb-sensorer skal antallet også angives.
B) Indtast følsomheden for hver sensor (se mærkaten på sensoren).
C) Indtast sensorens nominelle belastning.
D) Indtast systemets rebforhold (hvis det kræves).
E) For at udføre kalibreringen skal kabinen være tom.
F) Indsæt en vægt på mindst 30 % af kapaciteten i midten af kabinen. Jo større vægt der indsættes, jo større er kalibreringsnøjagtigheden.
Kontroller aktiveringen af overbelastningstærsklen og overensstemmelsen mellem den reelle vægt i bilen og den vægt, der er angivet på LLEC7-enheden (± 5 %).
Procedure for kompensation for kabeltab
Inden denne procedure udføres, skal systemet kalibreres, og AUT.KIT08 magnetiske sensorsæt skal tilsluttes (§ Tilslutning af sensorer til kabelkompensation for bevægelige aksler).
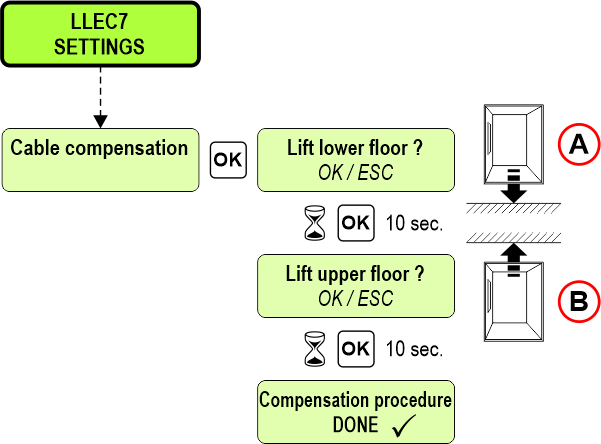
A) Flyt bilen til underetagen.
B) Flyt bilen til overetagen.
Indstilling af tærskelværdier
For hver tærskel er det muligt at indstille værdien (kg) og kontakttypen (normalt åben/normalt lukket).
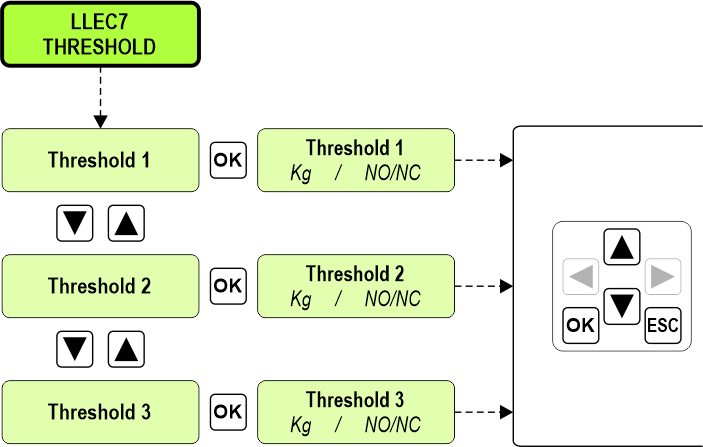
Standardværdier:
Tærskel 1: 25 % af elevatorens nominelle belastning / Normalt åben
Tærskel 2: 100 % af elevatorens nominelle belastning / Normalt åben
Tærskel 3: 115 % af elevatorens nominelle belastning / Normalt åben
LED'en lyser, hvis tærsklen er aktiv.
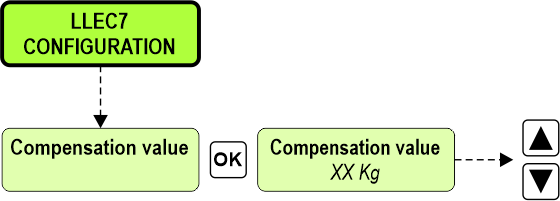
Manuel indstilling af kompensationsværdien for køreakselkablet
Det er muligt at ændre den værdi, der er registreret i kompensationsproceduren for bevægelige kabler, manuelt.
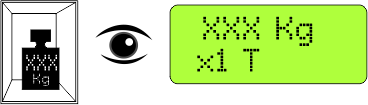
Visning af vægten og spændingen for hver enkelt sensor
Nyttig funktion til:
• Kontroller vægtfordelingen inde i kabinen
• Kontroller, om der er reb med forskellig spænding på systemet
• Kontroller, hvilken sensor der ikke fungerer
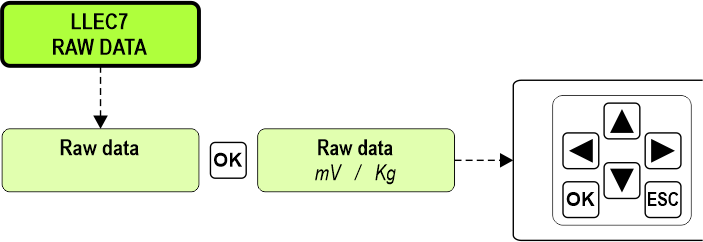
Vis vægten (kg) og spændingen i millivolt (mV) for hver enkelt sensor.
.
Datablad

| LLEC7 elektronisk styreenhed | |
|---|---|
| Spænding | 12/24 V DC |
| Maksimal absorption | 200 mA |
| Relæudgang 1/2/3 | 1A, 30V DC (resistiv belastning) |
| Indgang til lastlåsning | Tør kontakt |
| Driftstemperatur | -10 °C ~ +50 °C |

| Bilbundssensor | |
|---|---|
| Område | 800 kg |
| Indgangsimpedans | 1030 ± 10 Ω |
| Udgangsimpedans | 1000 ± 2 Ω |
| Isoleringsimpedans | ≥ 5000 MΩ |
| Sikker overbelastning | 150 % F.S. |
| Ultimativ overbelastning | 200 % F.S. |
| Temperatureffekt | ± 0,02 % F.S/10 °C |
| Driftstemperatur | -30 °C ~ +70 °C |
| Beskyttelsesklasse | IP67 / IP68 |
| Kabellængde | 6 meter |

| Enkelt reb sensor | |
|---|---|
| Nominel belastning | 750 kg (reb 6~8 mm) / 1000 kg (reb 9~11 mm) / 1000 kg (reb 12~15 mm) |
| Nominel effekt | 0,5 ~ 2,0 ± 0,1 mV/V |
| Indgangsimpedans | 350 ± 20 Ω |
| Udgangsimpedans | 350 ± 3 Ω |
| Isoleringsimpedans | ≥ 5000 MΩ /100 VDC |
| Anbefalet excitation | 3,3 V |
| Maksimal excitation | 15 V |
| Sikker overbelastning | 150 % F.S. |
| Ultimativ overbelastning | 200 % F.S. |
| Temperatureffekt | ± 0,5 % F.S/10 °C |
| Driftstemperatur | -20 °C ~ +80 °C |
| Beskyttelsesklasse | IP66 |
| Kabellængde | 2 meter |
Fejlfinding
| Problem | Løsning |
|---|---|
| Enheden rapporterer en fejl ved afslutningen af kalibreringsproceduren. | Kontroller, at sensorerne er tilsluttet korrekt. |
| Enheden rapporterer en fejl ved afslutningen af kompensationsproceduren. | Kontroller, at de magnetiske sensorer er tilsluttet korrekt. |
| Den vægt, der registreres i bilen, synes ikke at være korrekt. | Kontroller alle sensorer, og se vægten og udgangsspændingen. (Se menuen "Rådata"). |
Tips til brug
- Ved nye installationer anbefales det at gentage kalibreringsproceduren efter et stykke tid, da reduktionen i liftens friktion kan forstyrre den korrekte funktion af LLEC7-enheden.
- Det anbefales aldrig at ændre længden på sensorkablerne, da dette kan påvirke deres fabriksindstillede følsomhed.
- Før kalibreringsproceduren udføres, skal det kontrolleres, at bilen ikke er i kontakt med styreskinnerne.
- Hvis der anvendes dummy-sensorer i bilens bund, kan nøjagtigheden af vejningen ikke garanteres.
Download
| Reference | Version | Link |
|---|---|---|
| 1.2 | Download " " (engelsk) | |
| Forbindelse med Pitagora 4.0-controlleren | 1.3 | Download " " (engelsk) |
| Opdaterede handelsregler | 1.4 | Download (engelsk) |
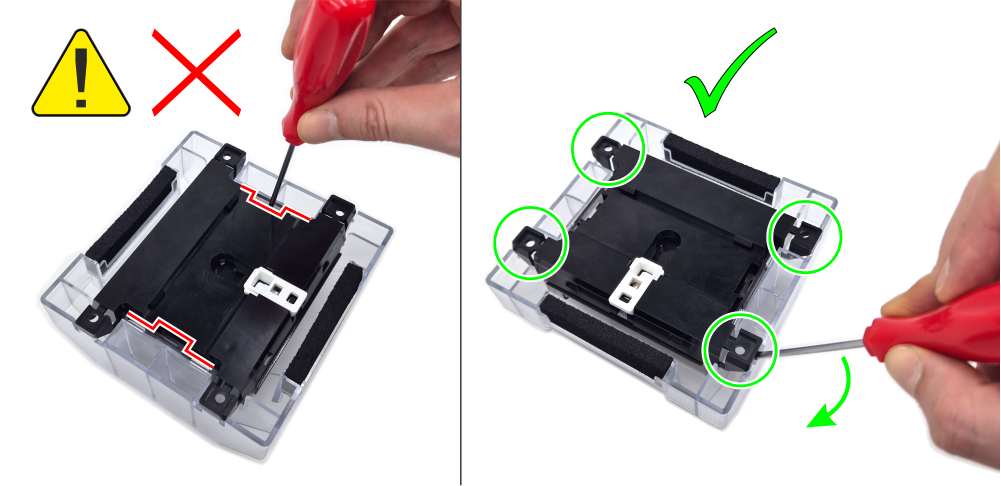
| Demonteringsvejledning | 1.5 | Download (engelsk) |
| tilslutning af magnetiske sensorer til kompensation af kørende kabler | 1.6 | |
| Version med enkelt rebssensor | 1.7 | Download (engelsk) |
| Bilrammesensorposition | 1.8 | Download " " (engelsk) |
| LLEC7 + Pitagora 4.0-controller | 1.9 (nuværende version) | Download " " (engelsk) |