(v 2.0)

Säkerhet och användningsanvisningar
Innan du installerar våra produkter rekommenderar vi att du läser avsnittet om säkerhet och användningsanvisningar på länken nedan.

Huvudsakliga funktioner
- 3 relägränsvärden + analog utgång.
- Automatisk kompensation av hisskorgens dynamiska belastning under färd (belastningslåsningsingång).
- Den kan hantera upp till 8 enskilda sensorer.
- Justerbar kompensation av kabelvikt för rörlig axel.
- Visning av vikt och utspänning för varje enskild sensor.
- IPX3-skydd genom det yttre höljet.
- Enhetshantering via Fusion-appen i lokal anslutning.
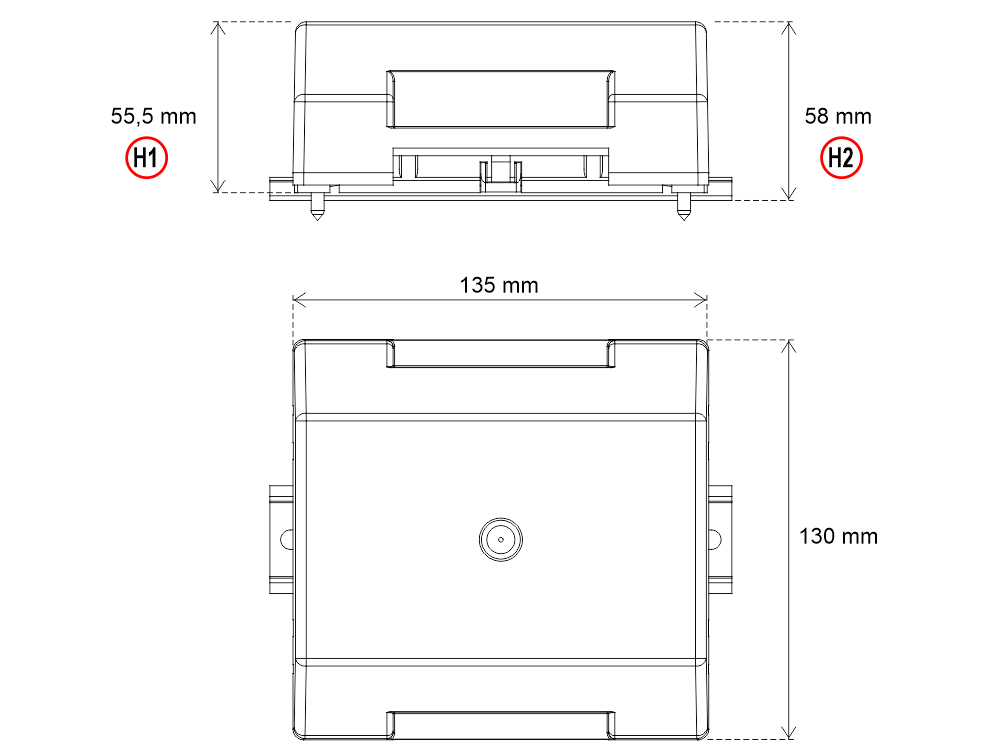
H1 – Fästning med skruvar
H2 – DIN-skenmontering
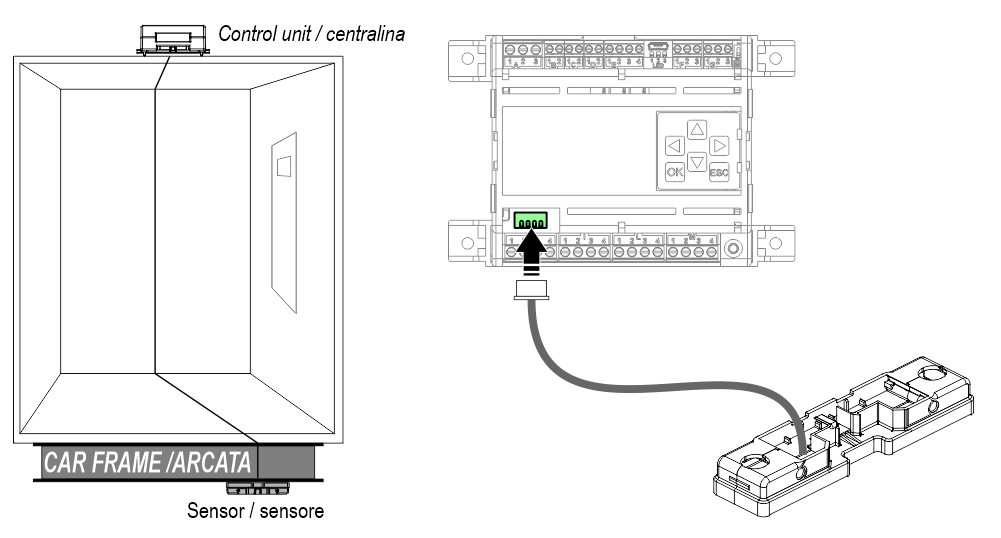
Systemkomponenter
LLEC7 elektronisk styrenhet + externa sensorer
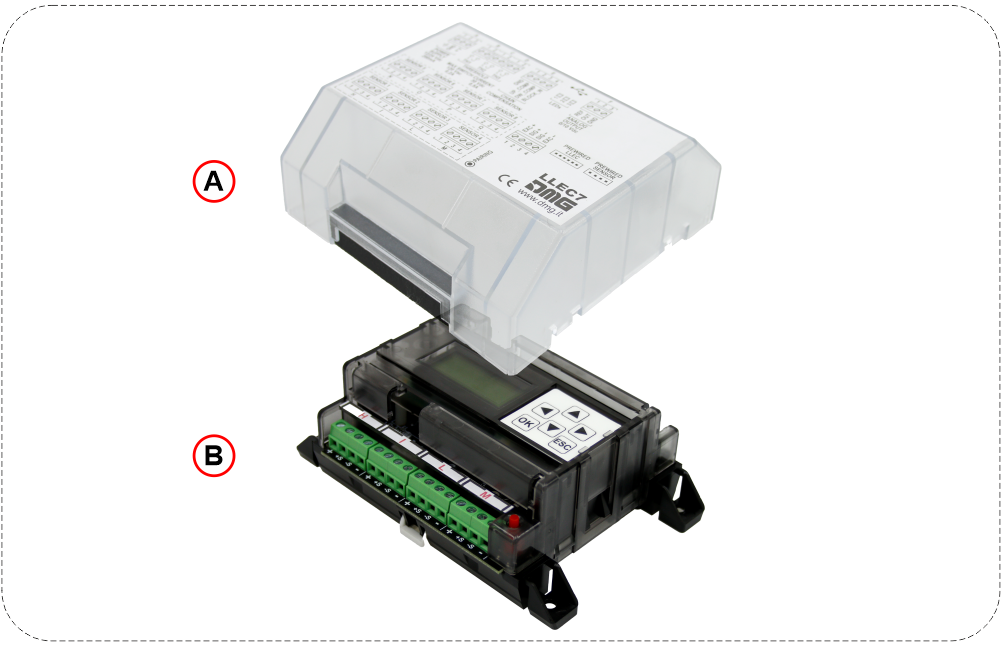
A) – Externt vattenskydd (IPX3)
B) – LLEC7 elektronisk styrenhet
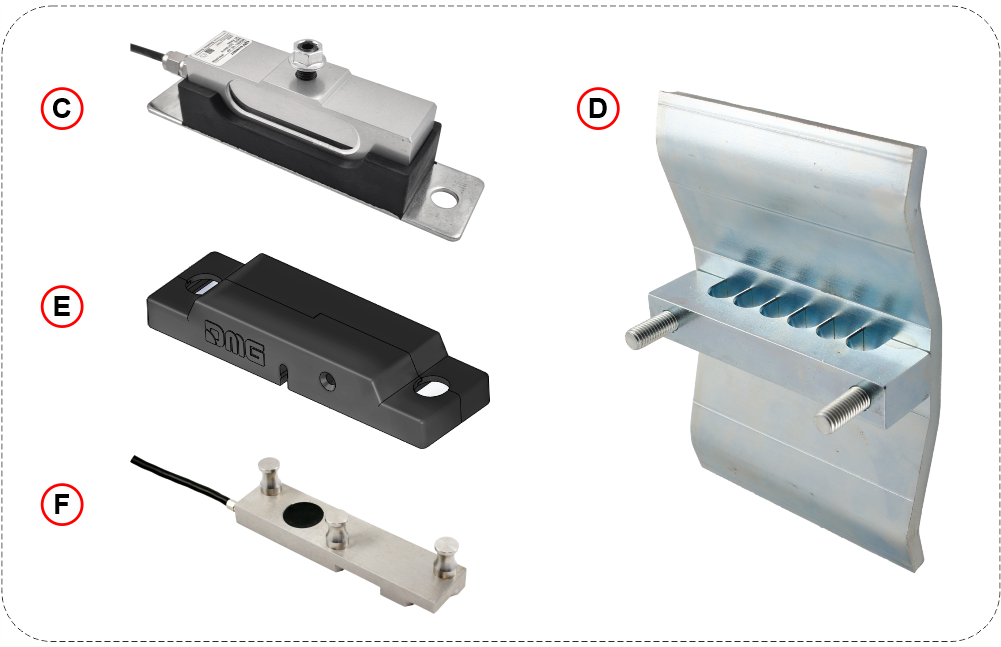
C) – Externt sensorsats för hisskorgens botten (6 m kabel)
D) – Extern sensor för linor
E) – Extern sensor för hisskorgens ram
F) – Extern sensor för enkel lina
Valfria komponenter
 kod [AUT.KIT08] – Magnetiska sensorer (NC)
kod [AUT.KIT08] – Magnetiska sensorer (NC)
 kod [EWS.AL212] – Kraftaggregat 220 V
kod [EWS.AL212] – Kraftaggregat 220 V
Hantering via Fusion APP

DMG Fusion-appen, som är ansluten via Bluetooth® till LLEC7, gör det möjligt att utföra alla procedurer som finns på enheten.
Det är inte nödvändigt att logga in.
Mobilappens gränssnitt är en exakt kopia av tangentbordet och LCD-skärmen på LLEC7, vilket gör det möjligt för installatören att utföra alla åtgärder utan att interagera direkt med enheten.
Installation, parkoppling och användning
Download installera Fusion-appen med hjälp av QR-koden på sidan.

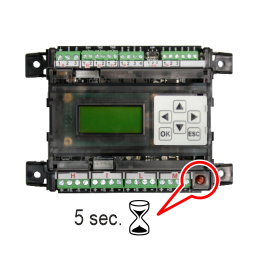 | 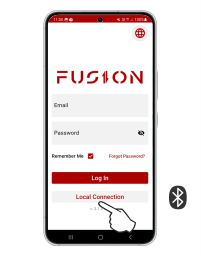 | 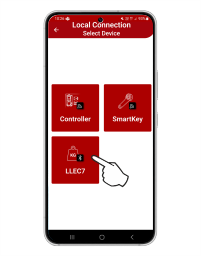 |
| Håll intryckt (5 sek.) | Du kan nå enheten lokalt utan att logga in (välj ”Lokal anslutning”). | Välj vilken typ av enhet som ska hanteras (LLEC7). |
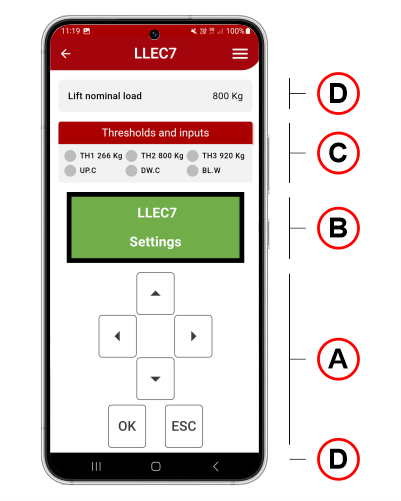
A) Programmering av knappsats
B) LCD-display
C) Status och tröskelvärden / status för ingångarna för kompensation (UP.C, DW.C) och viktblock (BL.W)
D) Visas också (överst och nederst på skärmen):
• De värden som angetts under kalibreringen, såsom lyftlast, antal och typ av sensorer, systemets repförhållande.
• Enhetens HW- och SW-version.
Installation
LLEC7 elektronisk styrenhet, fastsättning
– Fästning med skruvar –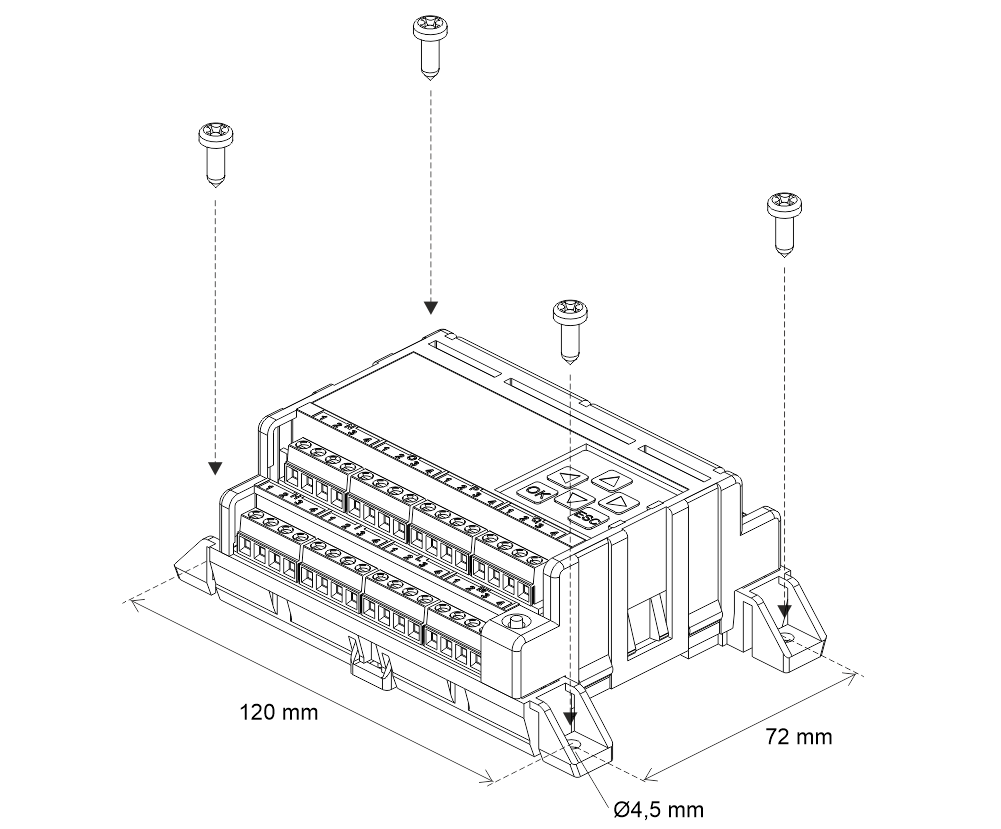
– DIN-skenmontering –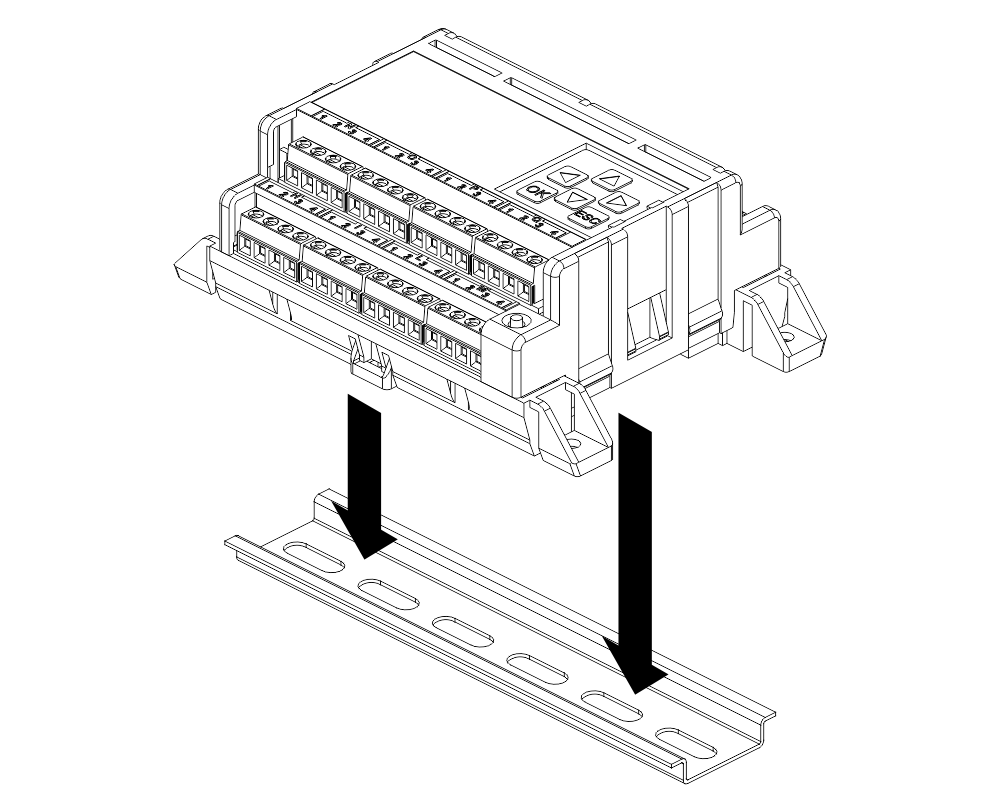
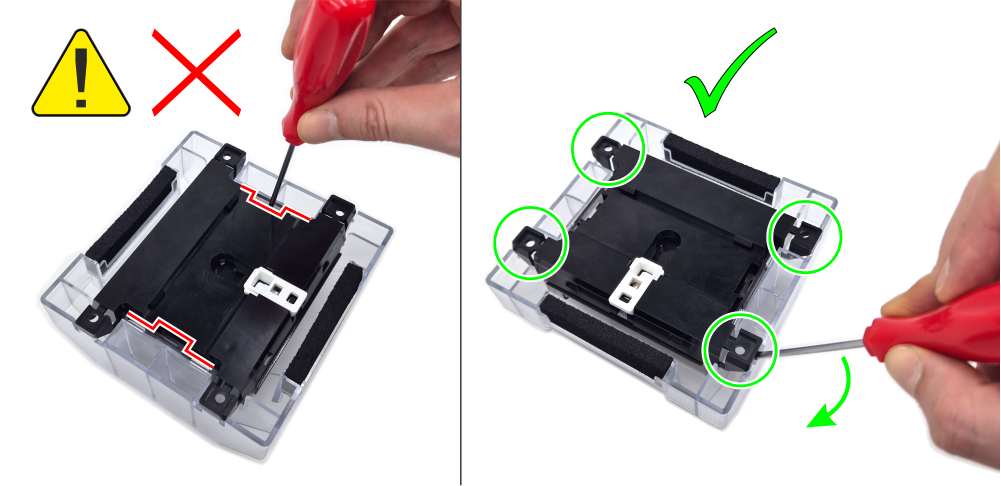
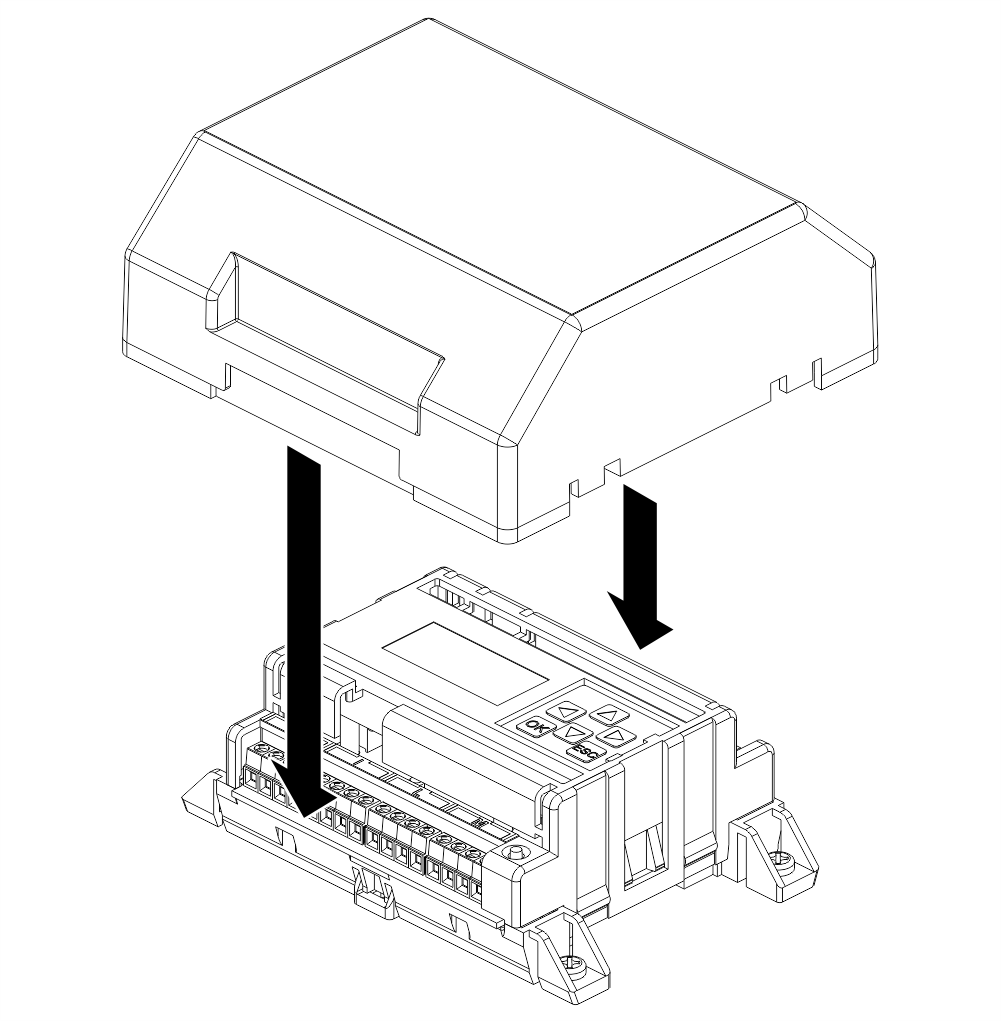
– Installation av yttre skyddskåpa –
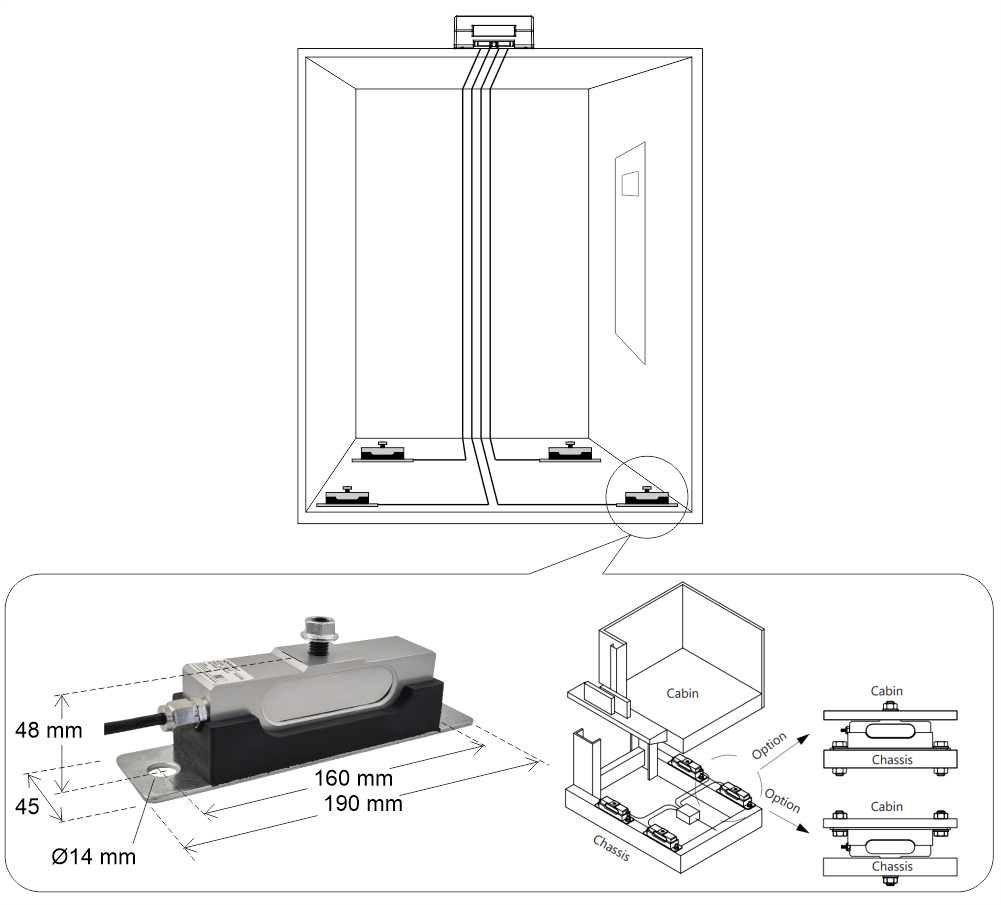
Installation av sensorer under bilen
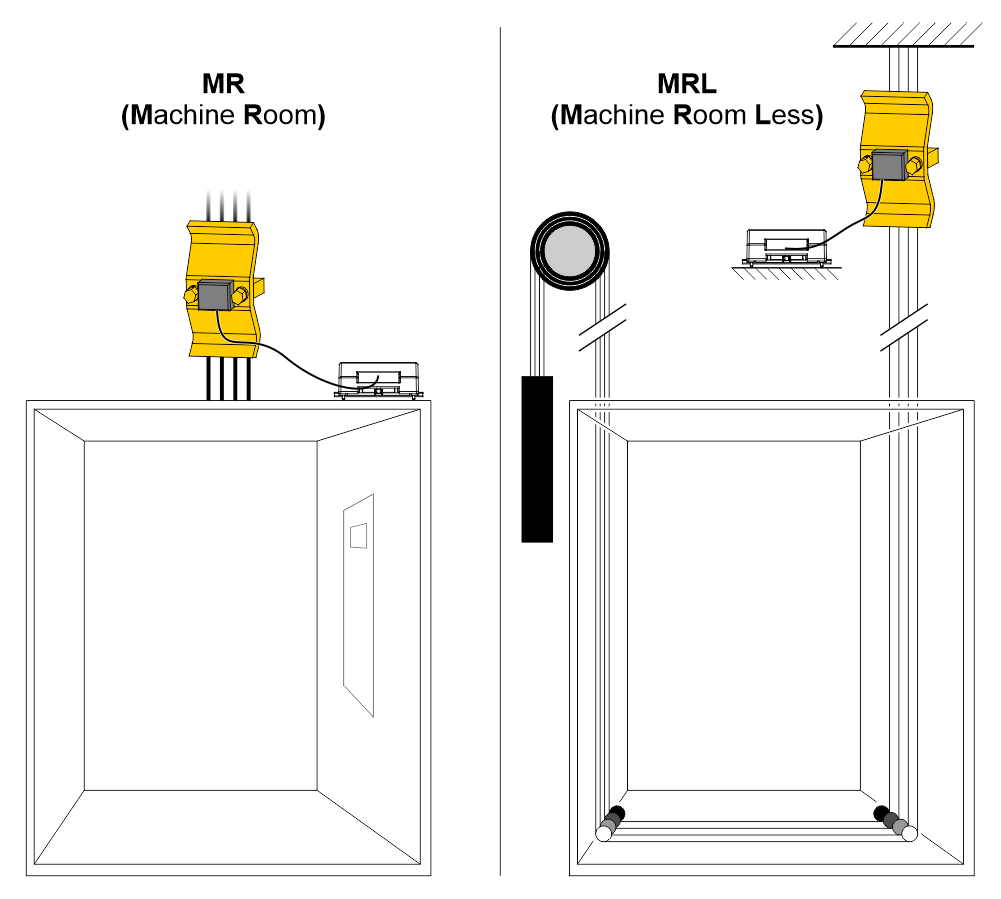
Installation av repssensor
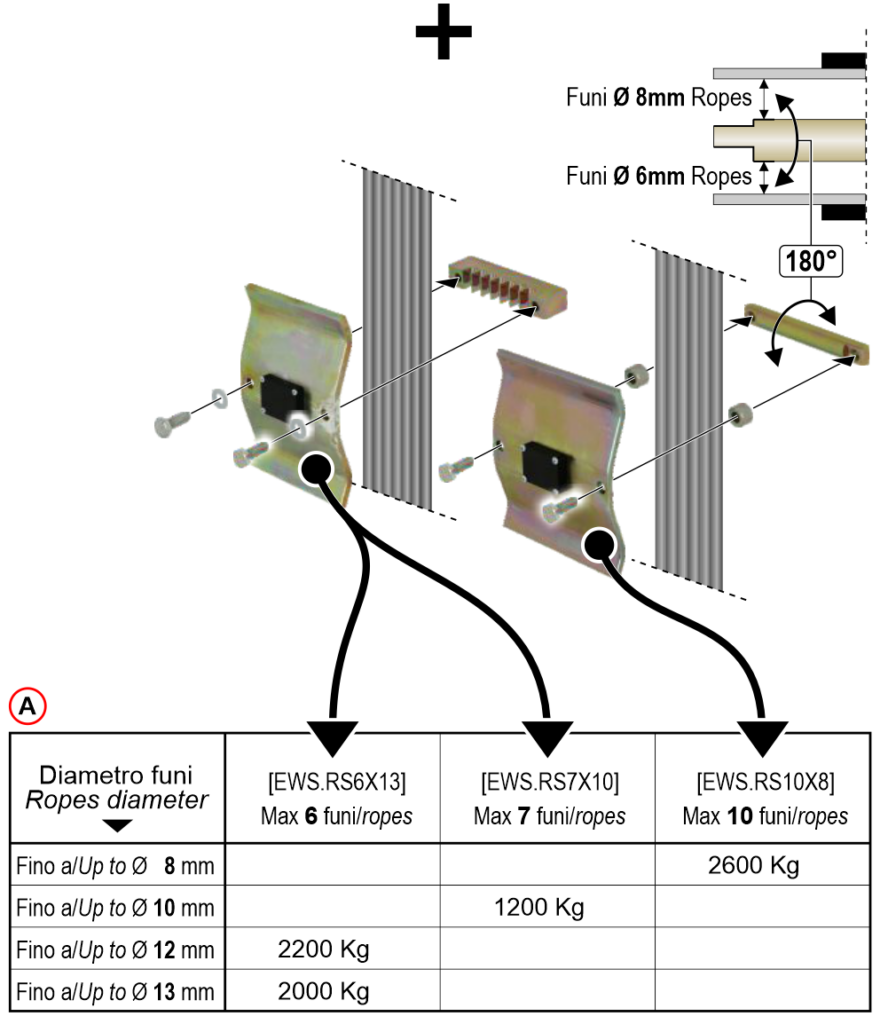
A) – Tabell över maximal belastning (massstruktur + lyftkapacitet)
Vid lyftrep 2:1 (sensor på fast ände + remskiva) fördubblas maximal belastning.
Installation av enkelrepssensor
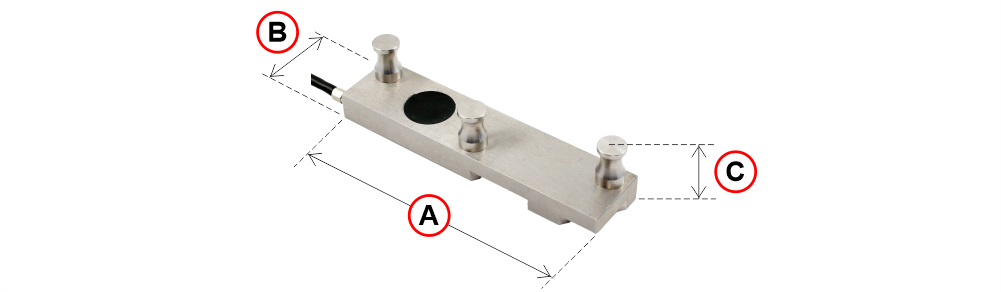
| Sensorns nominella belastning | A | B | C |
| 750 kg (rep 6–8 mm) | 87 mm | 20 mm | 21,5 mm |
| 1000 kg (rep 9–11 mm) | 120 mm | 28 mm | 28,5 mm |
| 1000 kg (rep 12–15 mm) | 132 mm | 36 mm | 33,5 mm |
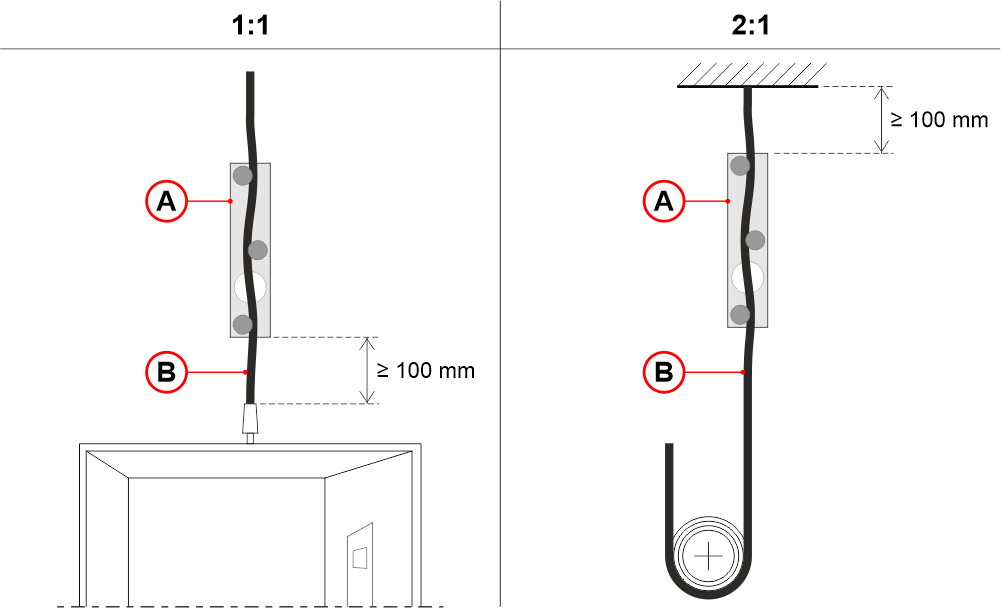
A) Enkel rep-sensor
B) Enkel rep
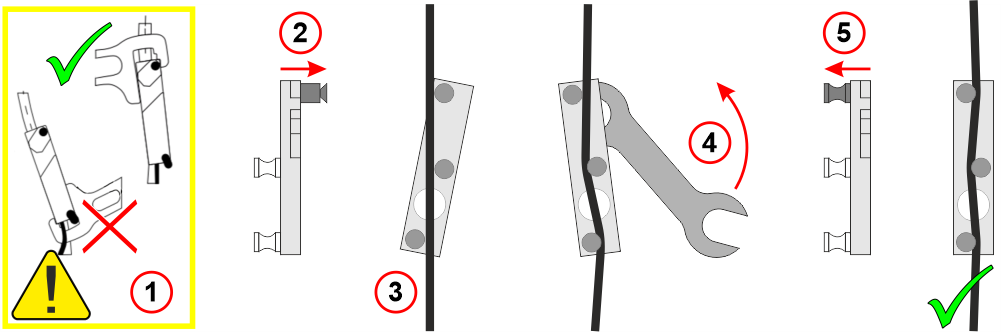
Följ stegen ovan och se till att använda den medföljande skiftnyckeln på sensorns övre del (4), eftersom det finns risk för att kabeln skärs av på den nedre delen.
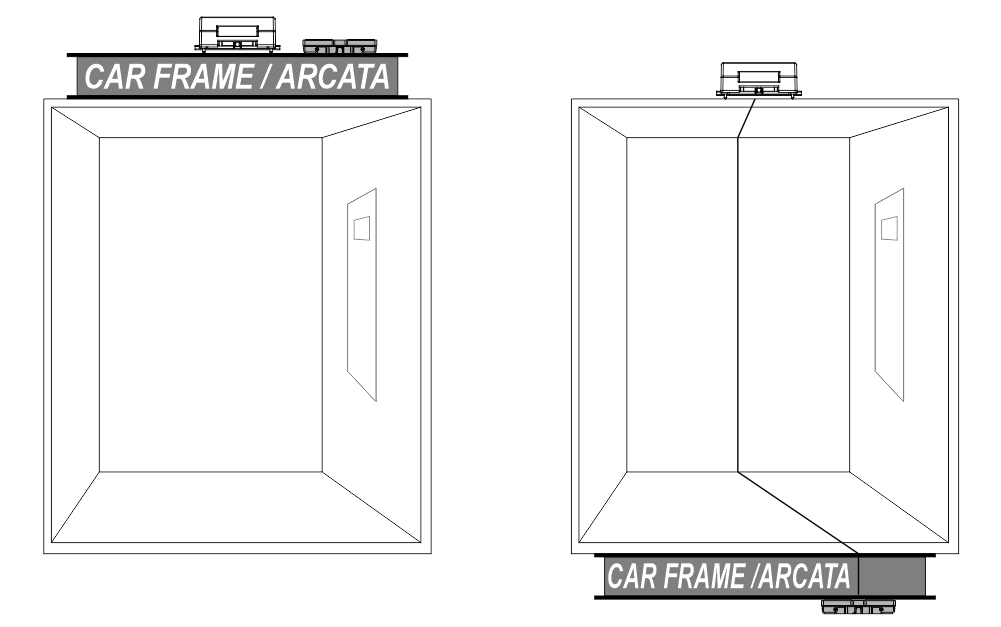
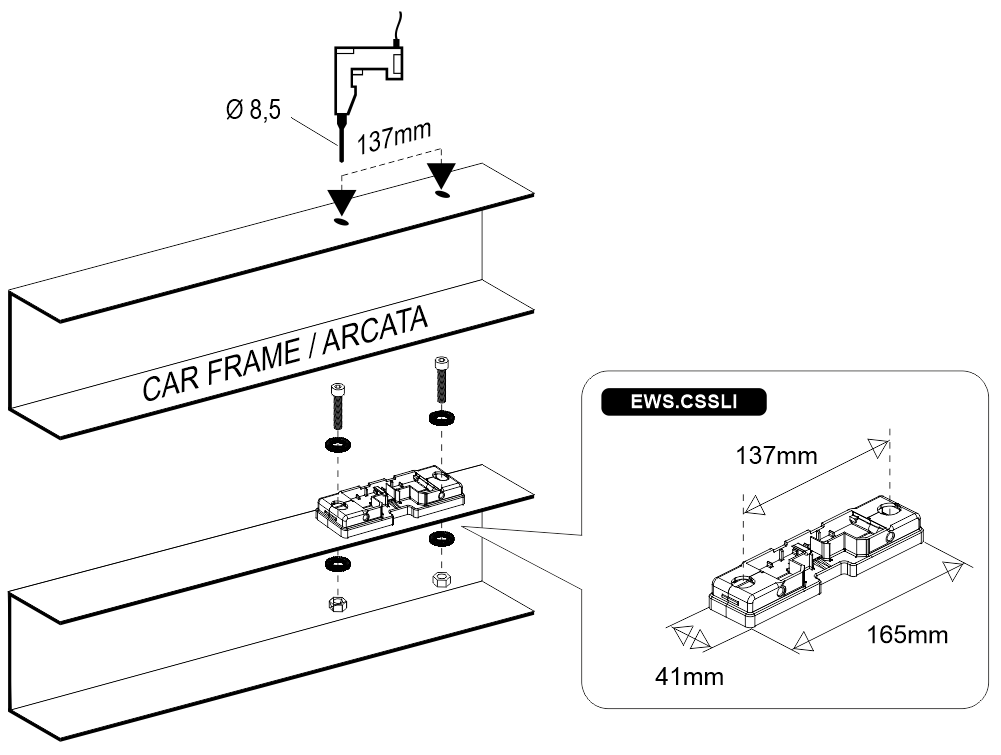
Installation av bilramssensor
Instruktioner för kabeldragning
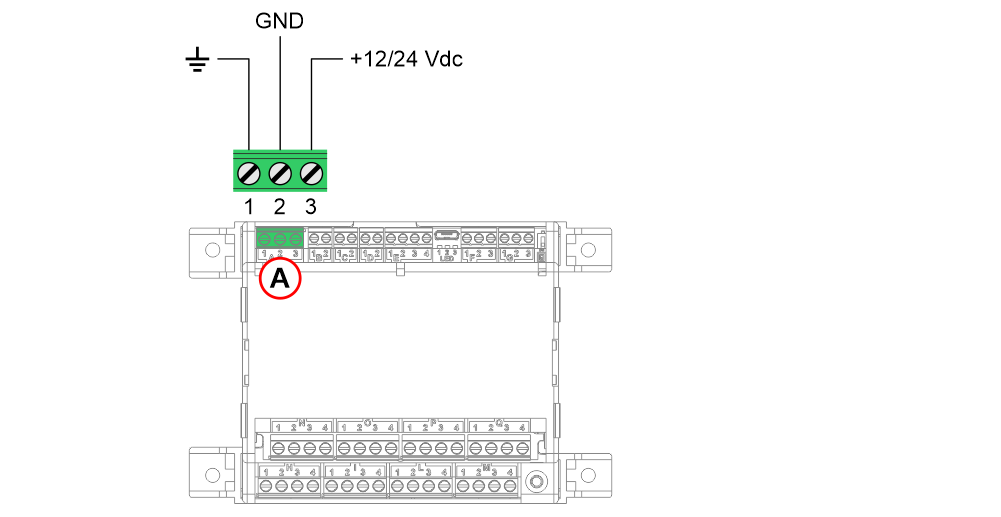
Allmän beskrivning av kontakterna
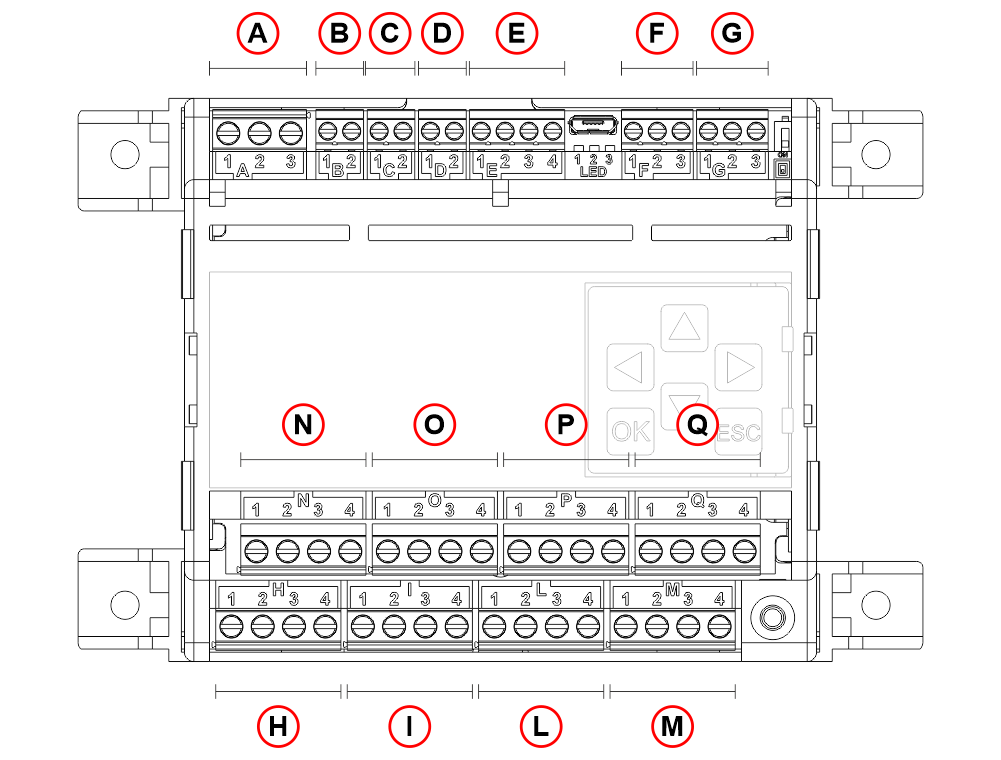
- A – Strömförsörjningsingång
1 – Jord
2 – GND
3 – +12/24 Vdc - B – Tröskelvärde 1 (standardvärde: 50 % av hissens nominella last)
1 – COM
2 – NO/NC - C – Tröskelvärde 2 (standardvärde: 100 % av hissens nominella last)
1 – COM
2 – NO/NC - D – Tröskelvärde 3 (standardvärde 115 % av hissens nominella last)
1 – COM
2 – NO/NC - E – Ingång för kompensation av rörlig kabel / Ingång för blockvikt
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – BLOC_W - F – Analog utgång
1 – REF
2 – OUT
3 – GND - G – CAN-ingång (ANVÄNDS INTE)
1 – CAN_L
2 – CAN_SHLD
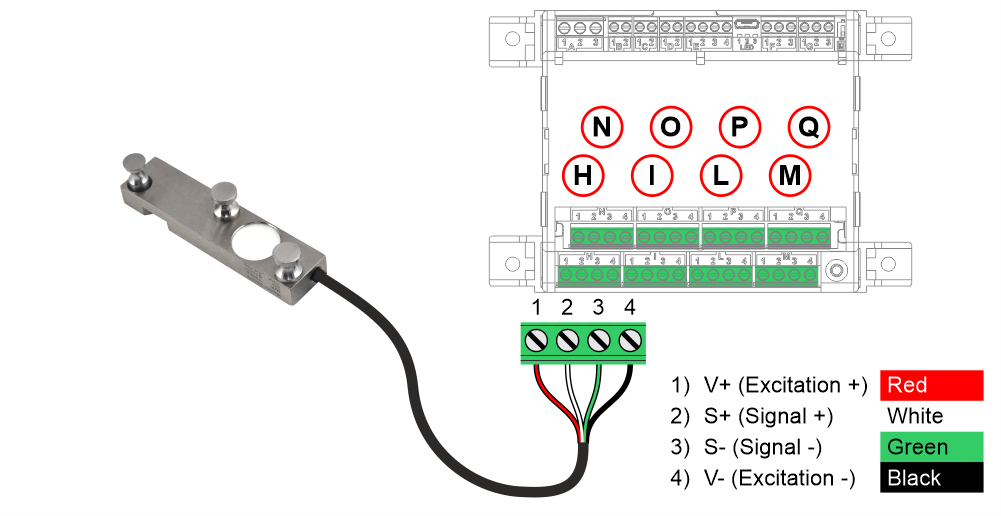
3 – CAN_H - H / I / L / M – Sensoringång 1 / 2 / 3 / 4
N / O / P / Q – Sensoringång 5 / 6 / 7 / 8
1 – V+ (Excitation +)
2 – S+ (Signal +)
3 – S- (Signal -)
4 – V- (Excitation -)
Strömförsörjningsingång
Anslutning av trösklar
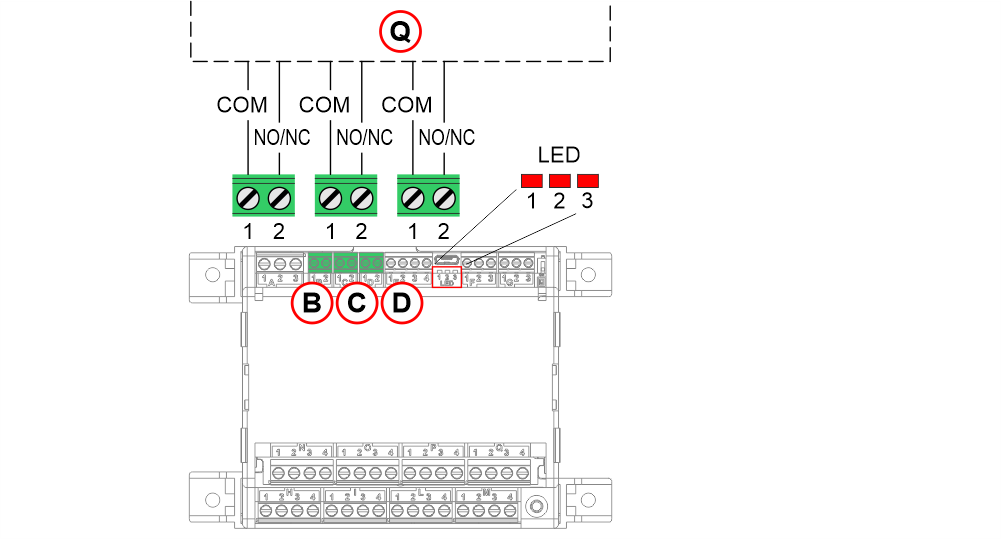
- B) – Tröskelvärde 1 (standardvärde: 25 % av hissens nominella last)
1 – COM
2 – NO/NC - C) – Tröskelvärde 2 (standardvärde: 100 % av hissens nominella last)
1 – COM
2 – NO/NC - D) – Tröskelvärde 3 (standardvärde 115 % av hissens nominella last)
1 – COM
2 – NO/NC - Q) – Styrenhet
- Tröskel-LED – LED-lampan tänds om tröskeln är aktiv.
LLEC7 + Pitagora 4.0-styrenhet
Anslutningen till Pitagora 4.0-systemet sker via TOC-boxen som sitter på taket av hytten.
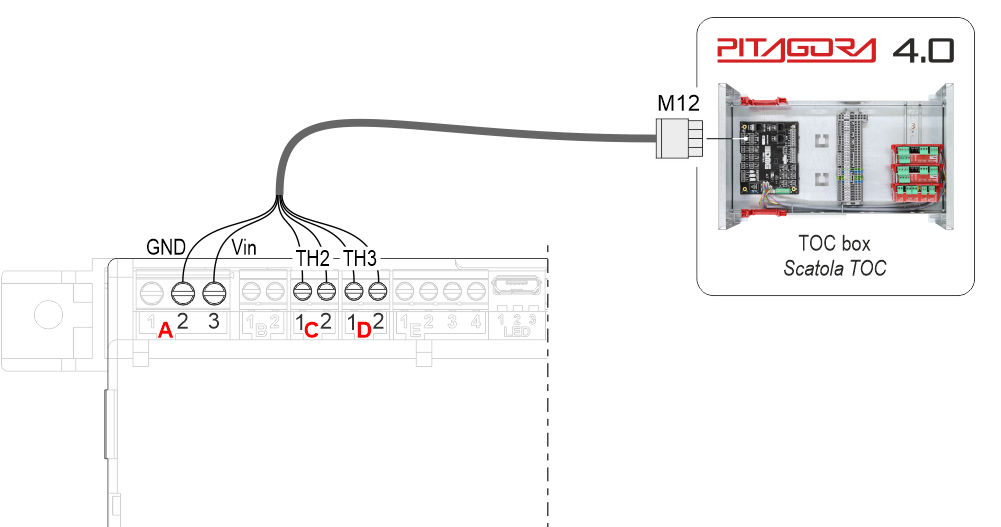
Kabeln förser inte bara LLEC7 med ström, utan innehåller även tröskelvärdena TH2 (full bil 100 %) och TH3 (överbelastning 115 %).
LLEC7 + NON-DMG-styrenhet
Anslutningen som visas nedan stöder upp till 8 sensorer.
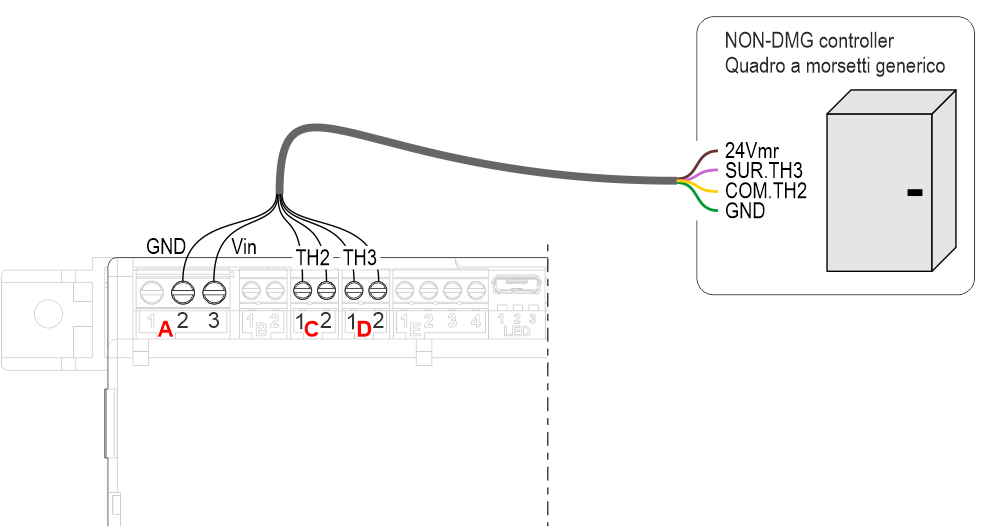
Kabeln (medföljer inte enheten) förser LLEC7 med ström och har dessutom tröskelvärdena TH2 (full bil 100 %) och TH3 (överbelastning 115 %).
Anslutning av sensorer för kompensation av rörliga axelkabel
I hissar med tung kabelvikt är kompensation av dessa viktiga. Viktigt att veta:
1) Hissens maximala last.
2) Rörliga kablars vikt per meter.
3) Schaktets totala längd.
Innan denna procedur utförs måste, utöver huvudanslutningarna, den externa positionssensorn [AUT.KIT08] anslutas.
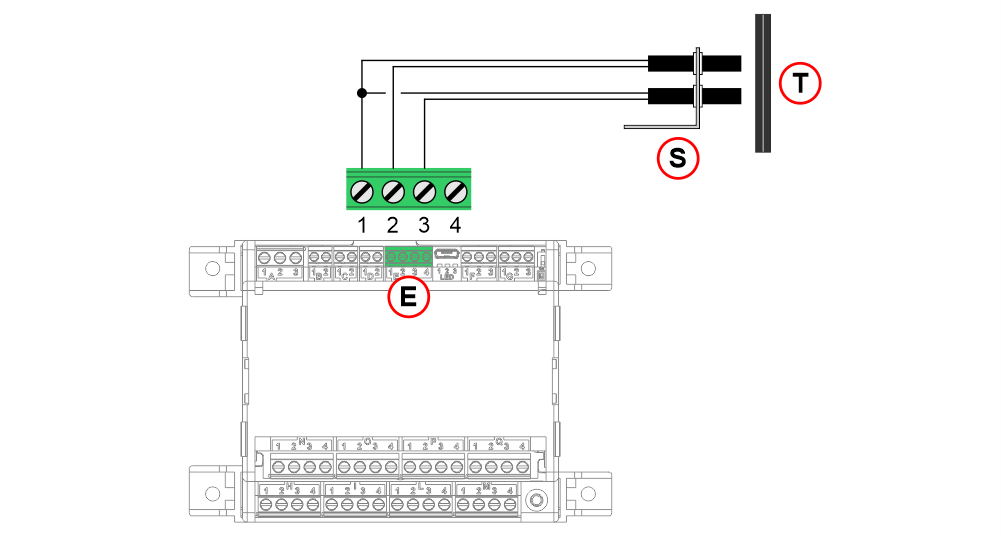
- E – Ingång för kompensation av rörlig kabel
1 – GND
2 – UP_COMP
3 – DW_COMP
4 – X (Se funktionen för vägningslåsning) - S – Positionssensorer på taket av hytten
- T – 1 magnet på varje våning
Anslutning av vägningslåsfunktionen
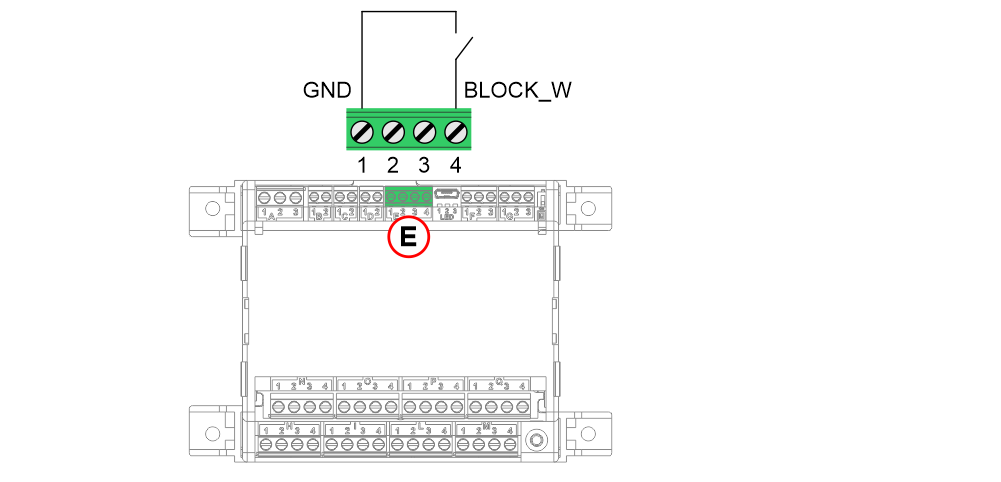
- E – Blockviktingång
1 – GND
2 – X
3 – X
4 – BLOCK_W

Ingången får inte anslutas direkt till säkerhetskretsen.
Anslutning av hisskorgens bottensensorer
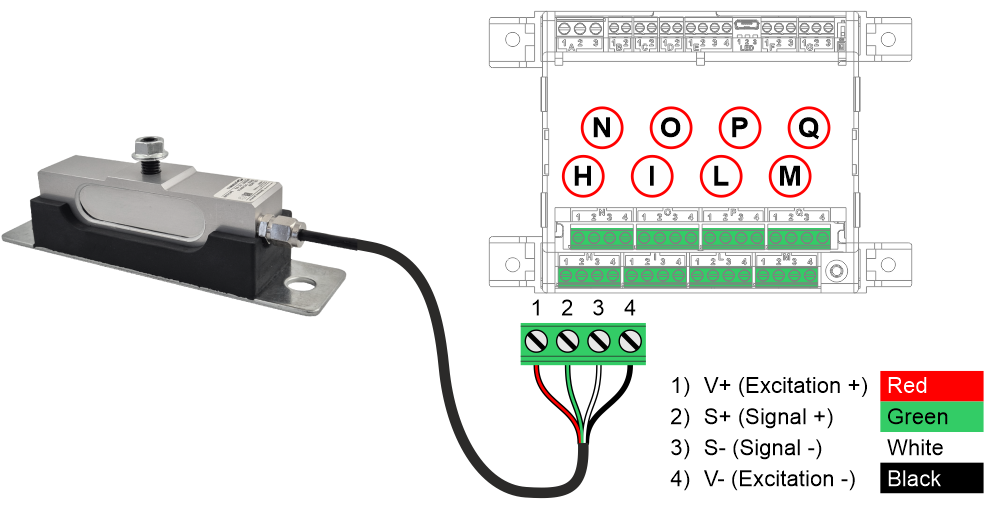
- H / I / L / M – Sensoringång 1 / 2 / 3/4
N / O / P / Q – Sensoringång 5 / 6 / 7 / 8 (endast med tillvalet expansionskort)
1 – V+ (Excitation +) ansluten till den röda kabeln
2 – S+ (Signal +) ansluten till den gröna kabeln
3 – S- (Signal -) ansluten till den vita kabeln
4 – V- (Excitation -) ansluten till den svarta kabeln
Anslutningskabelns längd är 6 m.
Anslutning av repens sensor
Anslutning av sensorn med enkel rep
- H / I / L / M – Sensor ingång 1 / 2 / 3 / 4
N / O / P / Q – Sensor ingång 5 / 6 / 7 / 8 (endast med tillvalet expansionskort)
1 – V+ (Excitation +) ansluten till den röda kabeln
2 – S+ (Signal +) ansluten till den vita kabeln
3 – S- (Signal -) ansluten till den gröna kabeln
4 – V- (Excitation -) ansluten till den svarta kabeln
Anslutning av bilramssensor
Programmering
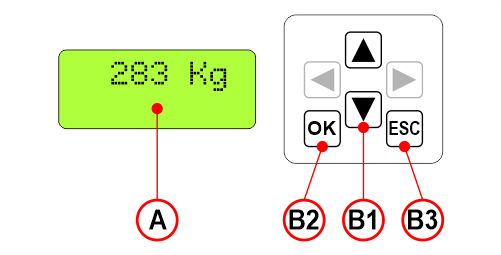
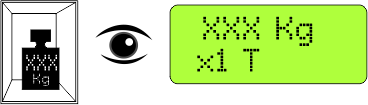
Display efter kalibrering
A) Aktuell vikt som detekterats i hisskorgen.
Programmering av knappsats
B1) Bläddra bland alternativen på aktuell nivå.
B2) Öppna menyn och bekräfta valet.
B3) Lämna aktuell nivå och återgå till föregående nivå.
Programmeringsmenykarta
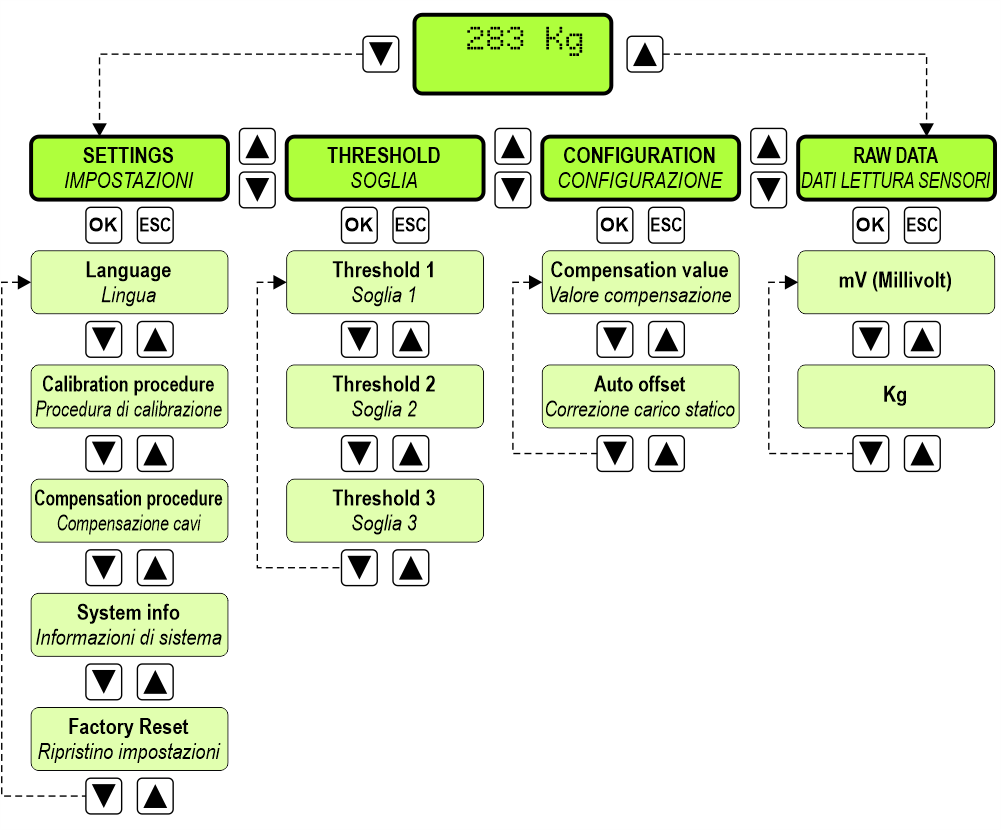
Om kalibreringsproceduren ännu inte har utförts visas följande meddelande på huvudmenyskärmen:
Kalibreringsförfarande
- Engelska
- italienska
- Tyska
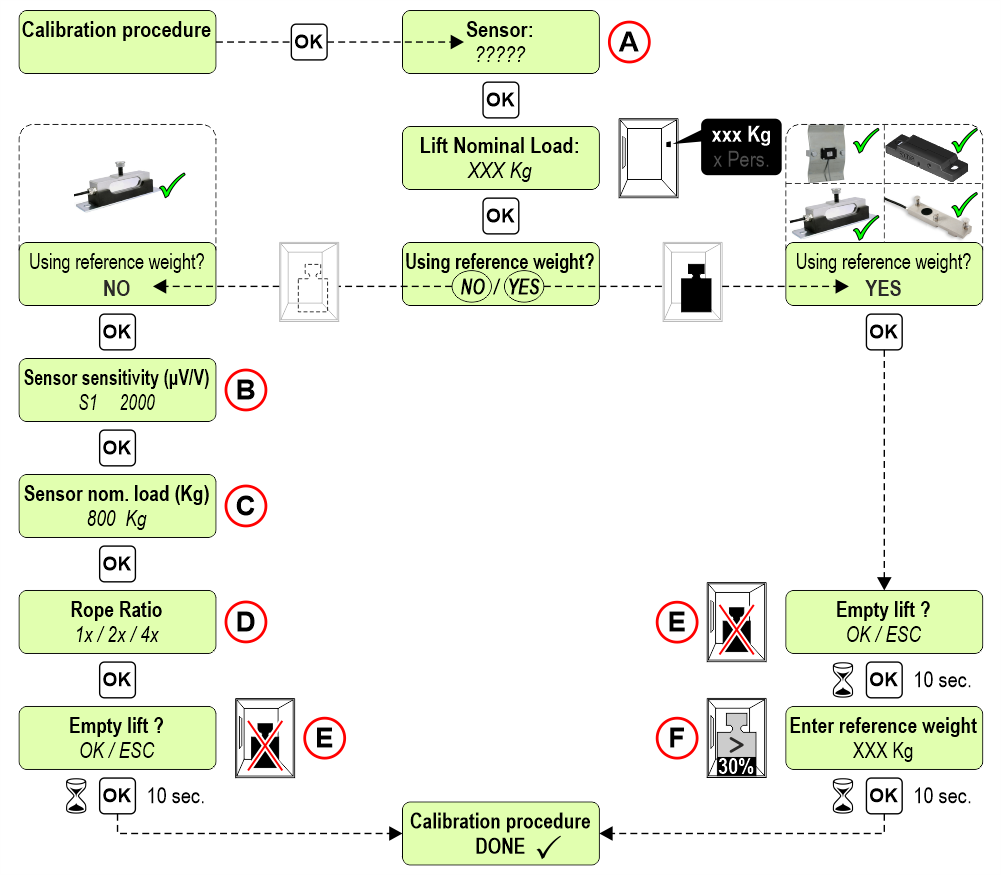
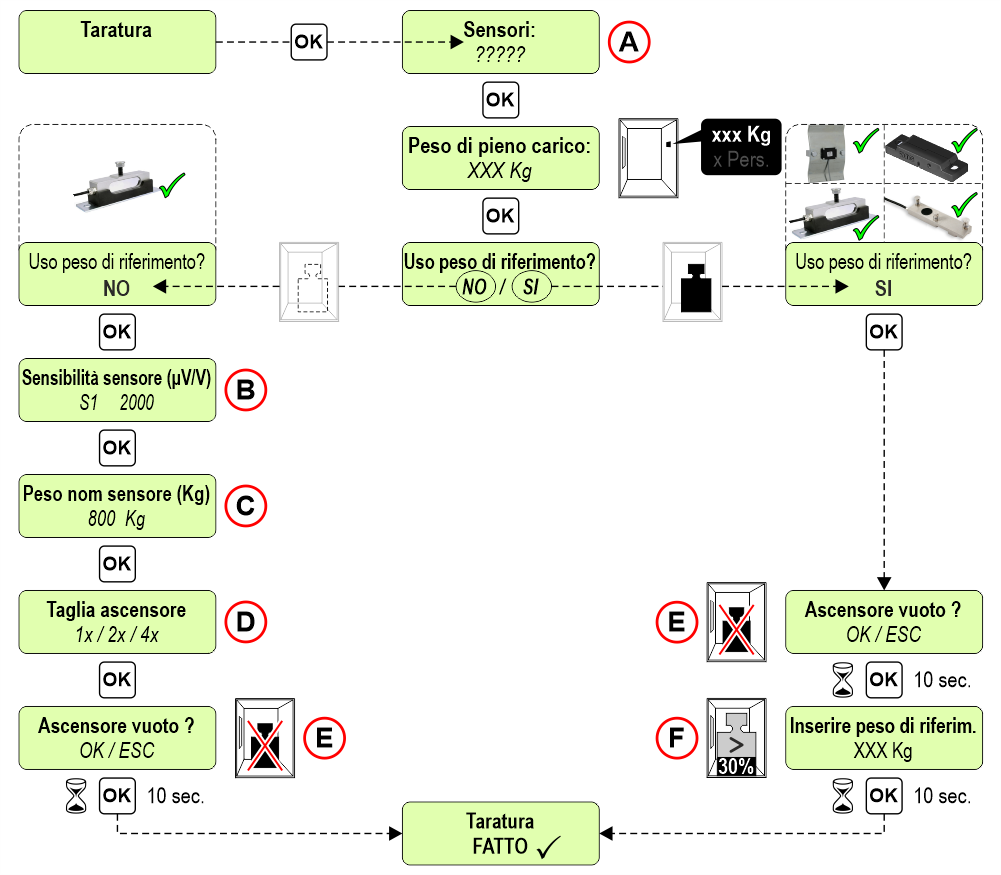
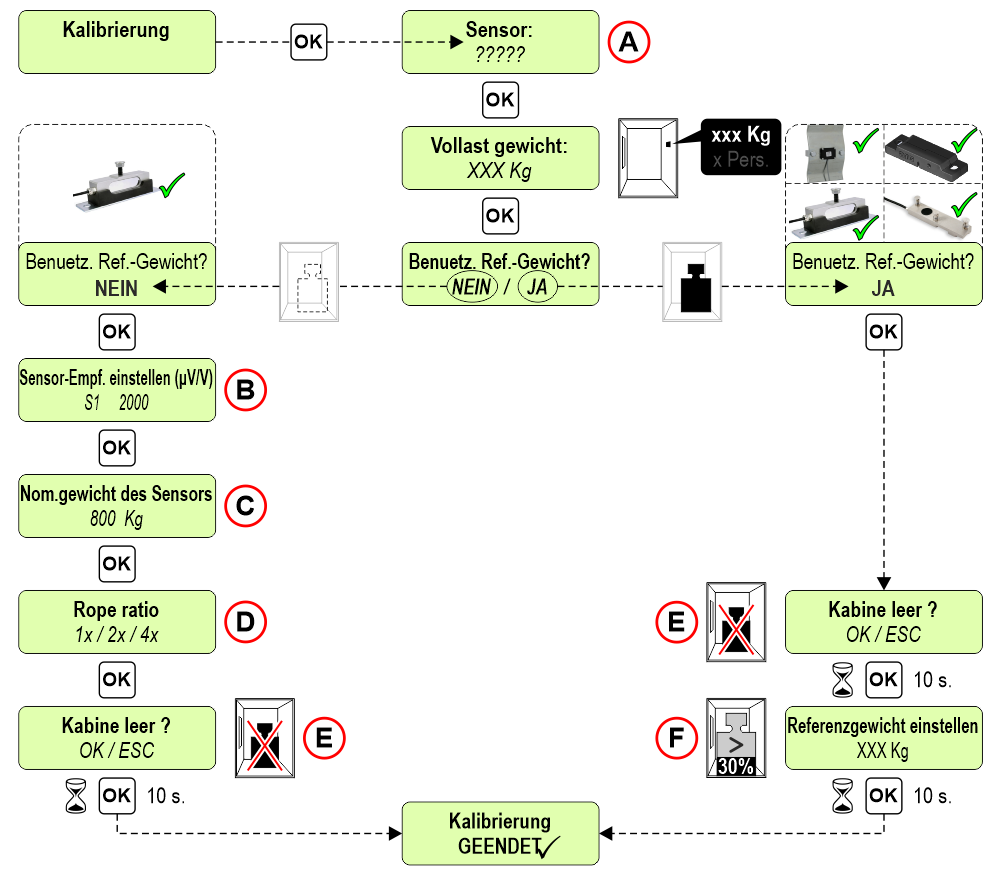
A) För sensorer under bilen eller sensorer med enkel rep krävs även kvantiteten.
B) Ange känsligheten för varje sensor (se etiketten på sensorn).
C) Ange sensorns nominella belastning.
D) Ange systemets repförhållande (om det begärs).
E) För att utföra kalibreringen måste hissen vara tom.
F) Placera en vikt på minst 30 % av kapaciteten i mitten av hissen. Ju större vikt som placeras, desto större blir kalibreringsnoggrannheten.
Kontrollera aktiveringen av överbelastningströskeln och överensstämmelsen mellan den verkliga vikten i bilen och den som anges på LLEC7-enheten (± 5 %).
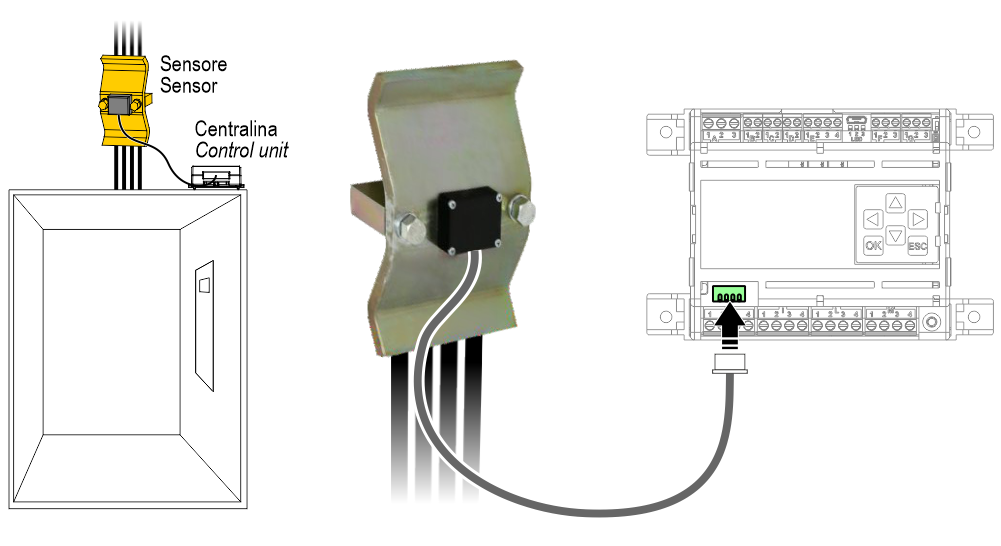
Förfarande för kompensation av rörlig kabel
Innan du utför denna procedur ska du kalibrera systemet och ansluta magnetiska sensorerna AUT.KIT08 (§ Ansluta sensorer för kompensation av rörlig axelkabel).
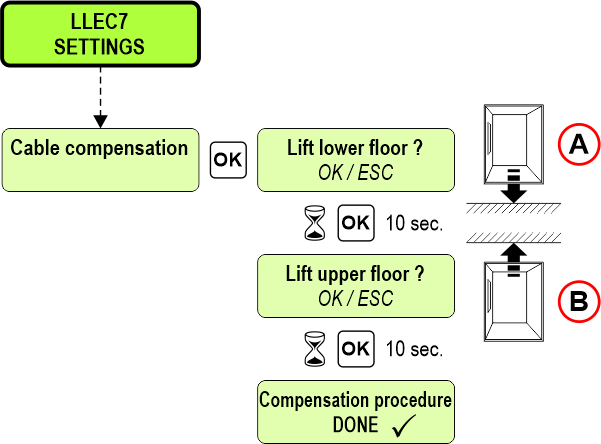
A) Flytta bilen till nedre våningen.
B) Flytta bilen till övre våningen.
Ställa in tröskelvärden
För varje tröskelvärde är det möjligt att ställa in värdet (kg) och typen av kontakt (normalt öppen/normalt stängd).
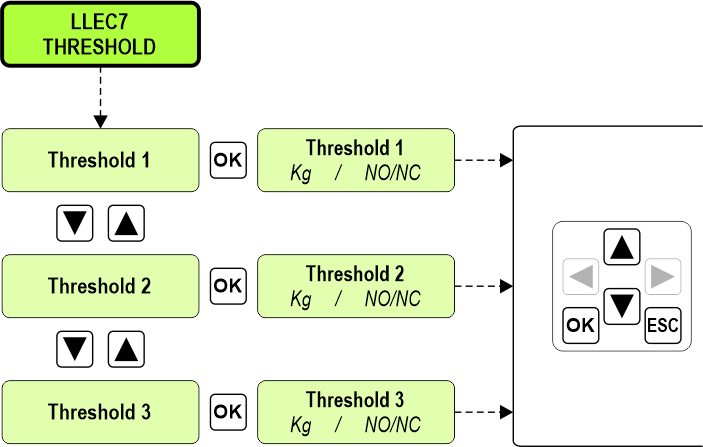
Standardvärden:
Tröskelvärde 1: 25 % av hissens nominella last / Normalt öppen
Tröskelvärde 2: 100 % av hissens nominella last / Normalt öppen
Tröskelvärde 3: 115 % av hissens nominella last / Normalt öppen
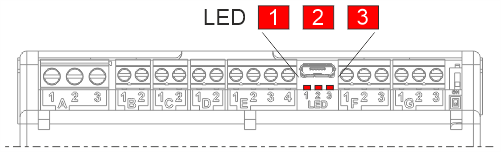
LED-lampan tänds om tröskeln är aktiv.
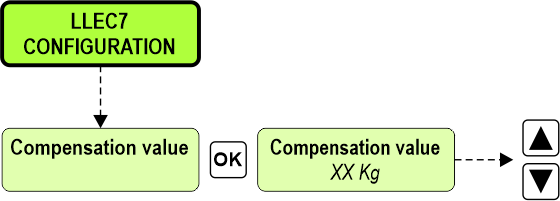
Manuell inställning av kompensationsvärdet för den rörliga axelns kabel
Det är möjligt att manuellt ändra det värde som upptäcks i kompensationsproceduren för rörliga kablar.
Visning av vikt och spänning för varje enskild sensor
Användbar funktion för:
• Kontrollera viktfördelningen i kabinen
• Kontrollera om det finns rep med olika spänning i systemet
• Kontrollera vilken sensor som inte fungerar
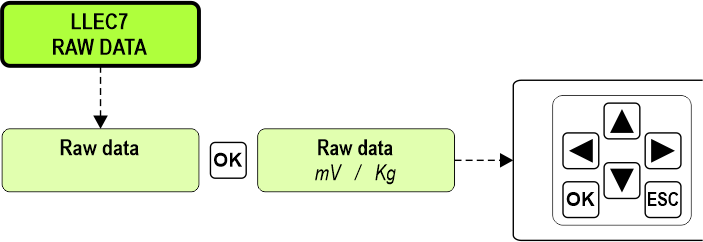
Visa vikten (kg) och spänningen i millivolt (mV) för varje enskild sensor.
.
Datablad

| LLEC7 elektronisk styrenhet | |
|---|---|
| Spänning | 12/24 V DC |
| Maximal absorption | 200 mA |
| Reläutgång 1/2/3 | 1A, 30V DC (resistiv belastning) |
| Lastlåsningsingång | Torr kontakt |
| Driftstemperatur | -10 °C ~ +50 °C |

| Bilens bottensensor | |
|---|---|
| Omfattning | 800 kg |
| Ingångsimpedans | 1030 ± 10 Ω |
| Utgångsimpedans | 1000 ± 2 Ω |
| Isolationsimpedans | ≥ 5000 MΩ |
| Säker överbelastning | 150 % F.S. |
| Ultimat överbelastning | 200 % F.S. |
| Temperatureffekt | ± 0,02 % F.S/10 °C |
| Driftstemperatur | -30 °C ~ +70 °C |
| Skyddsklass | IP67 / IP68 |
| Kabellängd | 6 meter |

| Enkel repssensor | |
|---|---|
| Nominell belastning | 750 kg (rep 6–8 mm) / 1000 kg (rep 9–11 mm) / 1000 kg (rep 12–15 mm) |
| Nominell uteffekt | 0,5 ~ 2,0 ± 0,1 mV/V |
| Ingångsimpedans | 350 ± 20 Ω |
| Utgångsimpedans | 350 ± 3 Ω |
| Isolationsimpedans | ≥ 5000 MΩ /100 VDC |
| Rekommenderad excitation | 3,3 V |
| Maximal excitation | 15 V |
| Säker överbelastning | 150 % F.S. |
| Ultimat överbelastning | 200 % F.S. |
| Temperatureffekt | ± 0,5 % F.S/10 °C |
| Driftstemperatur | -20 °C ~ +80 °C |
| Skyddsklass | IP66 |
| Kabellängd | 2 meter |
Felsökning
| Problem | Lösning |
|---|---|
| Enheten rapporterar ett fel i slutet av kalibreringsproceduren. | Kontrollera att sensorerna är korrekt anslutna. |
| Enheten rapporterar ett fel i slutet av kompensationsproceduren. | Kontrollera att magnetiska sensorer är korrekt anslutna. |
| Den vikt som registreras i bilen verkar inte stämma. | Kontrollera alla sensorer och kontrollera vikten och utspänningen. (Se menyn ”Rådata”). |
Användningstips
- Vid nya installationer rekommenderas att kalibreringsproceduren upprepas efter en tid, eftersom minskad friktion i hissen kan påverka LLEC7-enhetens korrekta funktion.
- Det är tillrådligt att aldrig ändra längden på sensorkablarna, eftersom detta kan påverka deras fabriksinställda känslighet.
- Innan kalibreringsproceduren utförs, kontrollera att bilen inte har någon friktion mot styrningarna.
- Om dummy-sensorer för bilens undersida används kan noggrannheten i vägningen inte garanteras.
Download
| Referens | Version | Länk |
|---|---|---|
| 1.2 | Download ” ” (engelska) | |
| Anslutning till Pitagora 4.0-styrenheten | 1.3 | Download ” ” (engelska) |
| Uppdaterade kommersiella koder | 1.4 | Download - (engelska) |
| Demonteringsanvisningar | 1.5 | Download - (engelska) |
| anslutning av magnetiska sensorer för kompensation av rörliga kablar | 1.6 | |
| Version med enkel repgivare | 1.7 | Download - (engelska) |
| Bilramsensorns position | 1.8 | Download ” ” (engelska) |
| LLEC7 + Pitagora 4.0-styrenhet | 1.9 | Download ” ” (engelska) |
| Koder för rep-sensorer | 2.0 (aktuell version) |