

Scheda madre
La scheda di controllo del sistema Pitagora 4.0 è basata sulla tecnologia elettronica a 32 bit e gestisce tutti i tipi di ascensori elettrici e idraulici. Si possono aggiungere collegamenti seriali e/o paralleli alle pulsantiere (cabina e piano). È particolarmente adatto per le installazioni elettriche VVVF, anche quelle dotate del sistema di movimento incontrollato della cabina dell'ascensore (emendamento A3 o EN81-20 / 50).
- Fino a 28 piani con controllo seriale e fino a 12 piani con controllo parallelo
- Linea seriale CAN Bus per collegare display e pannelli operativi di piano seriali
- Linea seriale CAN Bus per la comunicazione seriale della cabina dell'ascensore
- APB; Down Collective, Full Collective
- Controllo di sistemi multiplex (max 6)
- Controllo alternativo o selettivo delle porte su sistemi di accesso passanti o adiacenti
- Controllo della posizione dell'ascensore tramite contatti magnetici, encoder incrementale DMG vano , encoder motore o sistema di posizionamento assoluto ELGO LIMAX 33 CP
- Interfaccia di programmazione/diagnostica, a bordo e/o remoto.
- Diagnostica di stato, errori, guasti e stato degli I/O
- Gestione dei parametri e della diagnostica del VVVF (solo FUJI FRENIC LIFT LM2)
- Controllo avanzato del VVVF con controllo di velocità, comfort e precisione dell'arresto
- Aggiornamento del software tramite dispositivo USB
- Linea seriale RS232 per collegamento a PC e modem GPRS
- Compatibilità con tutti i prodotti DMG
- Compatibilità con tutte le soluzioni +A3 per impianti elettrici e idraulici
- Protezione dell'accesso vano (Accesso non autorizzato vano )
La scheda madre 4.0 contiene hardware e software che permette il controllo dell'ascensore e di tutte le sue periferiche. Attraverso i moduli di programmazione integrati e/o remoti permette di accedere a tutte le funzioni disponibili. Gli ingressi e le uscite sono collegati a tutti i dispositivi elettronici ed elettromeccanici di quadro e dell'ascensore.
La scheda madre ha un modulo di programmazione removibile che permette la visualizzazione e la modifica di tutti i parametri di base per la gestione e la configurazione del pannello di controllo. Nella versione VVVF possono essere visualizzati e modificati anche i parametri FUJI della configurazione base (menu VVVF BASE) e avanzata (menu VVVF ADVANCED).
Per i dettagli sul funzionamento del modulo di programmazione e un ampio menu di gestione del sistema, vedere il paragrafo modifica dei parametri del sistema.
Modulo di programmazione remota
Un modo alternativo per accedere al menu di configurazione di quadro, nella modalità di visualizzazione/modifica, è quello di collegare la tastiera rimovibile della Playboard DMG V3 (PlayPad), al connettore PLP V3, montato sulla scheda di controllo dell'ascensore.
Questo modulo può essere collegato in vari modi:
- Collegato direttamente
- Collegato con un cavo di prolunga dedicato direttamente sulla scheda (in sala macchine)
- Collegato alla scheda sul tetto della cabina dell'ascensore (TOC) nel caso di ascensori con dispositivi seriali precablati DMG.
Un modo alternativo per accedere a quadro è basato su Fusion App.

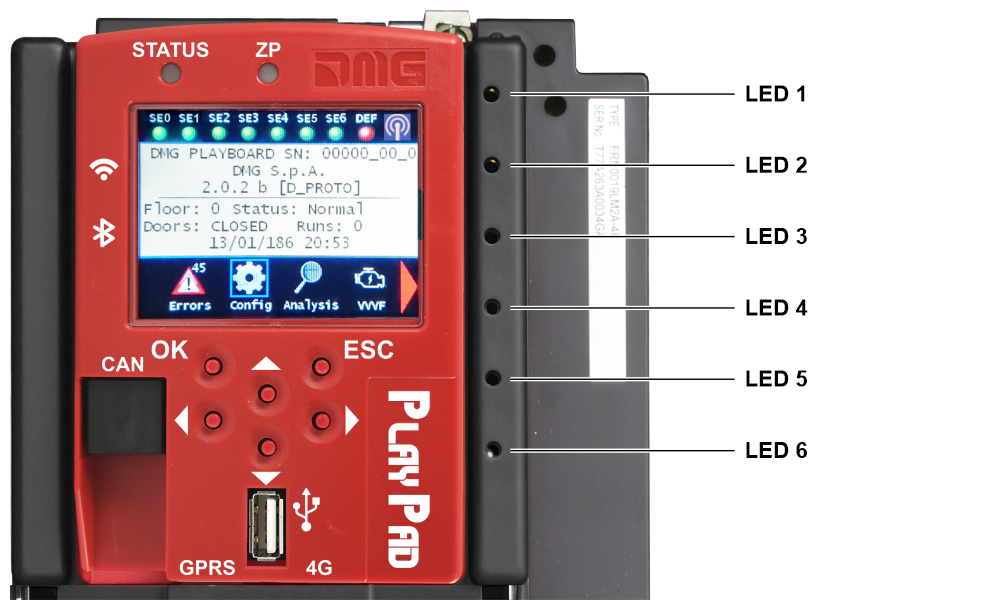
Sulla scheda madre sono presenti 6 led per una facile diagnostica:
LED1 (led verde)
Terminazione CAN Multiplex attiva: led spento quando la scheda MULX è collegata (la terminazione si sposta automaticamente sulla scheda MULX del primo e dell'ultimo multiplex quadro).
LED2 (led verde)
Terminazione CAN Cabine attiva: led spento quando una scheda opzionale (PIT8 / 16IO / 16RL) è collegata all'interno di quadro (la terminazione si sposta automaticamente sull'ultima scheda opzionale).
LED3 (led RGB)
Il colore di questo led dà informazioni sullo stato interno dell'ascensore secondo la seguente tabella:
| Colore | Stato |
|---|---|
| Led off | Il sistema sta eseguendo la procedura di reset |
| Verde | Il sistema è in modalità di funzionamento normale |
| Giallo | Il sistema è in modalità di ispezione |
| Rosa | Il sistema è in modalità operativa temporanea |
| Viola | Il sistema è fuori servizio (parcheggio della cabina) |
| Ciano | Il sistema funziona in modalità prioritaria (LOP / CABINA) |
| Rosso | Il sistema funziona in modalità vigili del fuoco |
| Bianco | Il sistema sta eseguendo la procedura di emergenza |
| Blu | Il sistema sta eseguendo la procedura di controllo della deriva della cabina dell'ascensore |
LED4 (led giallo)
Il led lampeggia quando la scheda è in funzione.
LED5 (led verde)
Led acceso dà lo stato della catena di sicurezza SE5
LED6 (led rosso)
| Led Off | Nessun guasto attivo |
| Led lampeggiante | Uno (o più) guasto attivo |
| Led On | Guasto di bloccaggio attivo |

| Nome | Descrizione | |
|---|---|---|
| FJ1 | Interfaccia FUJI | Collegamento all'interfaccia FUJI all'interno dell'inverter. |
| J4 | FUJI analogico/seriale | Collegamento al FUJI utilizzato in caso di inverter remoto. |
| J6 | Segnali paralleli | Collegamento alla scheda APPO. Comprende tutti i segnali paralleli disponibili sul blocco morsetto all'interno del pannello di controllo. |
| J8 | Circuito UCM | Collegamento al circuito per la soluzione UCM. Pitagora 4.0 dispone di soluzioni certificate per la gestione della soluzione UCM negli impianti di risalita. Il sistema UCM è composto da tre parti: - Rilevatore che rileva un movimento involontario della cabina. - Attuatore che attua l'azione frenante. - Dispositivo di arresto che arresta la cabina. Il dispositivo di arresto deve essere un dispositivo di sicurezza certificato ed è responsabilità dell'installatore garantire la compatibilità dei diversi elementi del sistema UCM. Per la verifica funzionale dell'intero sistema e la misurazione degli spazi e dei tempi di intervento, sono previsti test specifici da effettuare al al termine del montaggio (vedere Test e misure). Per ulteriori informazioni su connessioni e parametri si veda la sezione Circuito UCM). Un elenco non esaustivo delle tipologie di sistemi UCM e delle soluzioni più utilizzate è riportato nella tabella seguente, dove sono evidenziate le diverse soluzioni applicabili, ognuna delle quali ha un proprio circuito di interfaccia e programmazione dedicato. L'interfacciamento con i dispositivi elencati avviene secondo le specifiche indicate nei manuali dei relativi produttori. Quando viene fornito il sistema di posizionamento assoluto ELGO LIMAX 33CP(link), viene utilizzata la sua funzione UCM certificata. Vedere la tabella "Sistema UCM" qui sotto |
| J9 | Circuito di sblocco | Circuito per fare il bypass del contatto di sicurezza della porta per: - Pre-apertura e/o - Ri-livellamento In caso di sistema di Posizionamento con Encoder Assoluto questo connettore non viene utilizzato. Il circuito di gestione dell'operazione di ri-livellamento è composto da un modulo di sicurezza e da un relè di sicurezza. Questo circuito permette il by-pass dei contatti di sicurezza delle porte, consentendo così il movimento della cabina con porte aperte a velocità ridotta nella zona consentita (zona porte sbloccate) in caso di abbassamento del livello della cabina dell'ascensore, arresto non preciso della cabina dell'ascensore, o pre-apertura delle porte. L'uscita ISO chiude a GND. - Uscita ISO (contatto relè di sicurezza by-pass porte) collettore aperto Max 24V 100mA - Ingresso CCISO (Monitor relè di sicurezza ISO) chiusura a GND (NC) I = 5mA - Ingresso TISO (Monitor modulo di sicurezza) chiusura verso GND (NC) I = 5mA - S11-S12 (contatto libero) si chiudono quando ISO1 è chiuso Il secondo segnale di abilitazione del modulo Safety proviene direttamente da un secondo sensore (ISO2) e deve chiudere a GND. |
| J10 | Light Curtain / >|< | Utilizzare solo in configurazione completamente parallela. Collegamento alla vite morsetto dell'armadio. |
| J11 | Catena di sicurezza | Collegamento alla scheda SECU. Comprende la lettura dei 7 punti della catena di sicurezza. Il sistema si basa su un circuito optoisolato collegato a terra (all'interno della scheda SEC): - Ingresso SE0 <-> SE6 optoisolato 48 Vdc Al di sopra del circuito di sicurezza deve essere previsto un interruttore magnetico opportunamente dimensionato (Imax = 0,5 A). - SE0 è il punto di partenza della catena di sicurezza (dopo la protezione DIS all'interno di quadro) - SE1 controlla vano zona STOP e PIT Inspection Box - SE2 controlla lo STOP della parte superiore della cabina dell'ascensore e la scatola di ispezione TOC - SE3 controlla gli interruttori di fine corsa, l'ingranaggio di sicurezza, il regolatore di sovravelocità - SE4 controlla PIANO CHIUSURE PRELIMINARI - SE5 controlla PIANO SERRATURE - SE6 controlla CABINA DOORS e i sistemi di contatto pre-triggered Se il finecorsa, il regolatore di sovravelocità o l'ingranaggio di sicurezza sono attivati (il punto SE3 della catena di sicurezza si apre), il sistema è messo fuori servizio. Per rimetterlo in servizio è necessario resettare l'errore SE3 tramite il modulo di programmazione. Ovviamente il contatto di sicurezza del finecorsa finale di sovravelocità deve essere prima resettato. |
| J12 | Multiplex CAN | Collegamento alla scheda MULX. Comprende la linea CAN per le installazioni Multiplex. Per ulteriori informazioni sulle connessioni e i parametri, vedere l'ALLEGATO I. |
| J13 | Cabina a Piano | Segnale in uscita dal sensore della zona della porta per il segnale luminoso sull'armadio. |
| J14 | Comando idroelettrico | Collegamento alla scheda COIL. Include i comandi di movimento per le installazioni idro. Può essere utilizzato anche in caso di installazioni con Inverter Remoto. |
| J15 | Circuito EN81-21 | Collegamento al Circuito per gestire la Protezione in caso di Installazione con Spazio Ridotto in Fossa. Comprende la gestione del circuito bistabile sulle porte e dei dispositivi di protezione (sistema pre-triggered o protezione manuale nella fossa). Per ulteriori informazioni su connessioni e parametri vedere l'ALLEGATO IX. |
| J16 | Posizione dell'encoder | Sistema di posizionamento basato su un encoder incrementale: - DMG vano Encoder o - Encoder motore (solo per l'ascensore motore senza riduttore VVVF) In caso di sistema di posizionamento con encoder assoluto questo connettore non viene utilizzato. |
| J18 | Temperatura dell'ambiente | Collegamento al sensore di temperatura ambientale. Per utilizzare la funzione di controllo della temperatura ambiente il modulo sensore di temperatura DMG (Cod. Q40.SND). Questa funzione arresta il sistema quando la temperatura della sala macchine scende sotto la soglia minima o aumenta sopra la soglia massima impostata. |
| J19 | Pannello PME | Collegamento al pannello di controllo all'interno dell'armadio. |
| J20 | Uscita di ricambio | Uscita generica usata per funzioni speciali. |
| J21 | Circuito di emergenza | Circuito per emergenza o evacuazione completa con apertura del freno. |
| J22 | Relè del motore | Collegamento al relè per i contattori del motore (o segnali di abilitazione in caso di installazione senza contattori). Include anche l'ingresso di monitoraggio dei contattori principali. |
| J23 | Relè del freno | Connessione al relè dei contattori di frenatura (o delle valvole in caso di installazione Hydro). Comprende anche l'ingresso di monitoraggio dei contattori di frenatura. |
| J25 | Test delle batterie | Collegamento alla scheda CHAR. Include i segnali per: - Batterie scariche - Sequenza di fase (solo Hydro) - Modalità di backup |
| J26 | Schede opzionali | DMG Scheda opzionale per: - Pulsanti precablati in parallelo (PIT8) - Scheda di uscita a 16 relè (16RL): La scheda di espansione è necessaria in particolare per pilotare display paralleli (1 filo / Piano, 1 filo / segmento, Gray Codice, binario) come le uscite dirette disponibili - 16 Scheda di ingresso/uscita (16IO) |
| M1 | Alimentazione | Alimentazione da un alimentatore commerciale stabilizzato. Il negativo morsetto dei circuiti di alimentazione e del caricabatterie deve essere collegato a terra. Alimentazione dell'orologio interno: Super condensatore (autonomia di 5 giorni senza alimentazione). |
| Sistema UCM | |||
|---|---|---|---|
| Tipo di sistema | Rivelatore | Attuatore | Dispositivo di arresto |
| Ascensore elettrico. Nessuna manovra con porte aperte. | Non è necessario. (solo monitor dei freni) | ||
| Ascensore elettrico. Manovra con porte aperte. | Pitagora 4.0 | Interruzione dei comandi del freno (catena di sicurezza aperta) | Freni (*) |
| Ascensore elettrico. Manovre a porte aperte con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruzione dei comandi del freno (catena di sicurezza aperta) | Freni (*) |
| Ascensore elettrico. Regolatore di velocità con dispositivo anti-deriva (**) | Pitagora 4.0 | Interruzione dell'alimentazione del pin. | Dispositivi di sicurezza |
| Sollevatore elettrico. Regolatore di velocità con dispositivo anti-deriva (**) con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruzione dell'alimentazione del pin. | Dispositivi di sicurezza |
| Sollevatore idraulico con doppia valvola di discesa | Pitagora 4.0 | Interruzione dei comandi del freno (catena di sicurezza aperta) | Valvole (***) |
| Sollevatore idraulico con doppia valvola di discesa con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruzione dei comandi del freno (catena di sicurezza aperta) | Valvole (***) |
| Sollevatore idraulico con gestione elettronica delle valvole (centralina certificata) | Pitagora 4.0 | Interruzione dei comandi del freno (catena di sicurezza aperta) | Valvole (***) |
| Sollevatore idraulico con gestione elettronica delle valvole (centralina certificata) con ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruzione dei comandi del freno (catena di sicurezza aperta) | Valvole (***) |
(*) soluzione applicabile esclusivamente ai freni doppi certificati come elemento di arresto UCM secondo la norma EN81-20 5.6.7.3 e 5.6.7.4 (motori senza riduttore o motori con riduttore e freno lento vano ).
(**) Limitatori certificati UCM con perno antideriva (ad esempio Montanari RQxxx-A, PFB LKxxx con bobina LSP o dispositivi simili).
(***) Valvole in serie certificate come elemento di arresto UCM secondo EN81-20 5.6.7.3 e 5.6.7.4
Menu di programmazione e modifica dei parametri del sistema
V3 Mappa del menu dello schermo
| SCHEDA DI CONTROLLO DELL'ASCENSORE DMG S.p.A. | Lingua? Francese, inglese, portoghese, italiano, russo, tedesco, olandese ENTER: confermare / ESC: uscire |
|
| ▲ ▼ | ▲ | |
| Codice? Password | ----- ENTER ----> | Stato del sistema |
| ▲ ▼ | ||
| Guasti | ||
| ▲ ▼ | ||
| Stato I/O | ||
| ▲ ▼ | ||
| Configurazione | ||
| ▲ ▼ | ||
| Porte | ||
| ▲ ▼ | ||
| Segnali | ||
| ▲ ▼ | ||
| Funzioni speciali | ||
| ▲ ▼ | ||
| Posizionamento | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Rec.Parametri | ||
| ▲ ▼ | ||
| Orologio |
"Menu "Stato del sistema
Vi si accede facilmente dalla finestra principale del PlayPad, premendo una volta il tasto ENTER.
| Stato del sistema | Descrizione | Visualizzazione su Display seriale |
|---|---|---|
| Resettare | Il sistema sta eseguendo la procedura di reset | O - |
| In servizio | Il sistema è in modalità di funzionamento normale | |
| Ispezione | Il sistema è in modalità di ispezione | O |
| Temp. Operat | Il sistema è in modalità operativa temporanea | P |
| Fuori servizio | Il sistema è fuori servizio | |
| Cabina Priorità | Il sistema sta funzionando in modalità di priorità della cabina dell'ascensore (interruttore a chiave prioritaria attivato) | |
| Vigili del fuoco | Il sistema funziona in modalità vigili del fuoco (varie operazioni) | |
| Emergenza | Il sistema sta eseguendo la procedura di emergenza | E |
| Controllo della deriva | Il sistema sta eseguendo la procedura di controllo della deriva della cabina dell'ascensore | |
| Funzionamento verso l'alto | Il sistema corre verso l'alto | |
| Funzionamento verso il basso | Il sistema corre verso il basso | |
| Ri-livellamento | La cabina dell'ascensore è al livello di piano e si sta ri-livellando | |
| Ancora a piano | La cabina dell'ascensore è a livello di piano , senza chiamate registrate | |
| Alta velocità | Il sistema funziona in modalità alta velocità | |
| Bassa velocità | Il sistema sta funzionando in modalità a bassa velocità | |
| Chiusura della porta | La porta è completamente chiusa | |
| Porta aperta | La porta si apre (o si apre/chiude) | |
| Cabina pieno carico | La macchina dell'ascensore è stata completamente caricata | |
| Fotocellula A | L'ingresso relativo all'ingresso A della fotocellula è attivo | |
| Fotocellula B | L'ingresso relativo all'ingresso B della fotocellula è attivo | |
| Pulsante BRA | L'ingresso relativo al pulsante della porta aperta dell'ingresso A è attivo | |
| Pulsante BRB | L'ingresso relativo al pulsante della porta aperta dell'ingresso B è attivo |
"Menu "Guasti
Questo menu elenca gli ultimi 60 guasti memorizzati nella memoria interna di quadro. Tutti i guasti sono descritti nella sezione Risoluzione dei problemi.
ATTENZIONE: In caso di black out, la memoria interna viene salvata solo se la batteria è collegata.
| Piano 0 12:30:56 < Guasti > | ----- ENTER ----> | Piano 0 < Guasti > Nessun guasto | ||
| ----- ENTER ----> | Piano 0 < Guasti > Guasti: 4 Display ? | ----- ENTER ----> | < Guasti > 3/4 43 = Ispezione Pos: 0 # 1 Cod. 0 17/03/09 10:10 * (vedi sotto per i dettagli) |
|
| ▲ ▼ | ||||
| Azzerare tutti i guasti registrati (premere ENTER per confermare) NOTA: i guasti vengono cancellati quando la cabina dell'ascensore si ferma | Piano 0 < Guasti > Guasti: 4 Reset? | |||
| ▲ ▼ | ||||
| Cancellare l'errore rilevato sul finecorsa (premere ENTER per confermare) NOTA: la cancellazione effettiva avviene solo se il sistema di memoria è fermo | Piano 0 < Guasti > Guasti: 4 Resettare XXX? (vedi tabella sotto) | |||
| Guasto | Descrizione |
|---|---|
| Reset SE3 | Guasto del finecorsa; si può cancellare solo dopo aver chiuso la catena di sicurezza. |
| Reset 82212 | Controllo della deriva |
| Reset RSP | Guasto RSP; per fossa e spazio di testa ridotti. |
| Reset UCM | Guasto dell'UCM; per l'emendamento A3 |
| Reset ISO | Guasto ISO; rilevamento del problema nel monitoraggio del funzionamento del modulo di sicurezza per l'apertura avanzata della porta / ri-livellamento. |
| Reset SCS | Guasto SCS; installazione 81-20. |
| Azzerare l'UAS | Guasto UAS; Funzione speciale. |
"Menu "Stato degli I/O
 | ----->>>>> |  | ----->>>>> | Piano 0 - 12:30:56 < Stato I/O > |
| Campo | Descrizione | Navigazione | Valori (gruppo di 12) | ||||
|---|---|---|---|---|---|---|---|
| Cabina chiamata | Simulazione di una chiamata alla cabina dell'ascensore | ▲▼ (Selezionare piano) ENTER (Conferma) ESC (Esci) | |||||
 Playboard IN-OUT | Ingressi/uscite del sistema □ = Contatto aperto ■ = Contatto chiuso | ▲▼ (Cambia gruppo) ENTER (Esci) ESC (Uscita) | GRUPPI | ||||
| 1/9 | REM VHS SUR | RED TH1 COM | REV TH2 LE | REV1 REV2 LTMP |
|||
| 2/9 | RMO BRK RDE | RGV RMV RPV | MTR YBRK CCF | CCO CCOB |
|||
| 3/9 | BRA FOA ROA | CEA FFA RFA | BRB FOB ROB | CEB FFB RFB |
|||
| 4/9 | HS BFR OTM | PCA | POM RPH J20 | CPOM IEME OEME |
|||
| 5/9 | FLM FLD | BIP GNGM GNGD | 511B 511L | DSA 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | FAI ZP | FAS TISO | CAM ISO | AGH AGB CISO |
|||
| 8/9 | REM REM1 REM2 | RED RED1 RED2 | PME OVS | REV REV1 REV2 |
|||
| 9/9 | L-RED L-GREEN BUZZER | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF IN-OUT | Ingressi/uscite VVVF □ = Contatto aperto ■ = Contatto chiuso | ▲▼ (Cambia gruppo) ENTER (Esci) ESC (Uscita) | GRUPPI | ||||
| 1/8 | EN FWD REV | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 RST | Y3 30 A/B/C | Y4 | |||
| 3/8 | BUSY ACC DEC | ALM INT BRK | EXT NUV RL | TL VL IL |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST --- | Fref = 0,00 Hz TRQ --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Encoder 0 P/s kW PRINCIPALE = |
||||||
| 7/8 | Guasto VVVVF 0 = --- 2 = --- | Guasto VVVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 pulsanti | Stato dei pulsanti di chiamata □ = Pulsante non attivato ■ = Pulsante attivato | ▲▼ (Cambiare gruppo) ◄► (Cabina/giù/su) ENTER (Esci) ESC (uscita) | GRUPPI | ||||
| Lato cabina A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Lato cabina B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| pulsante lato A in basso | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| pulsante lato inferiore B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Verso l'alto lato A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Verso l'alto lato B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Schede AUX | Schede Ingressi/uscite AUX □ = Contatto aperto ■ = Contatto chiuso | ▲▼ (Cambia pagina) ENTER (Uscita) ESC (Esci) | SCHEDE 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| SCHEDE 16 IO OUT | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| SCHEDE 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| Ingressi BDU | Ingressi BDU □ = Contatto aperto ■ = Contatto chiuso | ▲▼ (Modifica pagina) ◄► (Cambiare gruppo) ENTER (Esci) ESC (Esci) | Gruppo: Porta, Incendio, Chiave 1, Chiave 2, Chiave 3, Chiave 4. Per ogni gruppo, viene visualizzato lo stato del contatto per ogni piano. |
||||
 Lista di registrazione delle chiamate | Elenco delle chiamate registrate □ = Chiamata non registrata ■ = Chiamata registrata | ▲▼ (Cambiare gruppo) ◄► (Cabina/giù/su) ENTER (Esci) ESC (uscita) | Stessi gruppi di PUSHBUTTONS | ||||
| [0] Inizio = ... [1] Inizio = ... [2] Inizio = ... | Contatori di esecuzione 0] parziale (azzerabile) [1] totale [2] uso futuro | ◄► (Cambia) ENTER (Reset e uscita) ESC (Esci) | La data mostrata è riferita all'ultimo azzeramento del contatore parziale [0] | ||||
| Analogico | Misure analogiche | ▲▼ (Cambia pagina) ESC (Esci) | 24 V = Alimentazione VCAB = Assorbimenti per armadi e cabine VMR = Assorbimenti BDU 24VB = Tensione delle batterie +5.0 V = Alimentazione interna alla scheda TAMB = Sensore di temperatura ambiente PWM = Uscita analogica della velocità |
||||
| Misure TOC | Misure analogiche | ▲▼ (Cambia pagina) ESC (Esci) | T_SHA = vano temperatura MAIN = alimentazione TOC COP _A = COP assorbimenti lato A COP _B = COP lato B assorbimenti |
||||
| COP Misure | Misure analogiche | ▲▼ (Cambia pagina) ESC (Esci) | MAIN_A = alimentazione di COP A MAIN_B = COP B alimentazione T_CAR = Temperatura della cabina |
||||
| PIANI Linea | BDU Linea di comunicazione | ENTER (Reset) ESC (Uscita) | Errore: Numero di errore di comunicazione FER: Frame Error Rate Data e ora dell'ultimo reset |
||||
| CABINA Linea | TOC / COP Linea di comunicazione | ENTER (Reset) ESC (Uscita) | Errore: Numero di errore di comunicazione FER: Frame Error Rate Data e ora dell'ultimo reset |
||||
| Linea MTPX | MULTIPLEX Linea di comunicazione | ▲▼ (Cambia pagina) ENTER (Reset) ESC (Esci) | Errore: Numero di errore di comunicazione FER: Frame Error Rate Data e ora dell'ultimo reset |
||||
| Modello ELGO: | Diagnostica di ELGO | ||||||
Parametri di descrizione della tabella PLAYBOARD IN-OUT
| Codifica d'ingresso | Descrizione |
|---|---|
| SE0 | Catena di sicurezza Inizio |
| SE1 | Catena di sicurezza contatti di sicurezza del pozzo |
| SE2 | Catena Sicurezze Tetto cabina (Stop, Bottoniera ispezione) |
| SE3 | Finecorsa finale della catena di sicurezza, ingranaggio di sicurezza, regolatore di velocità |
| SE4 | Catena di sicurezza porte di corridoio contatti preliminari |
| SE5 | Catena di sicurezza porte della hall inerlocks |
| SE6 | Contatti delle porte dell'ascensore a catena di sicurezza e dispositivo di pre-innesco (81-21) |
| CCO CCOB | controllo contattori di potenza |
| CISO | Monitorare il relè ISO |
| TISO | Controllo del modulo di sicurezza SM1 |
| LE | Luce di emergenza (alimentazione della luce della cabina dell'ascensore) |
| BFR | pulsante di chiusura della porta |
| PCA | Funzione di priorità della cabina dell'ascensore |
| POM | Operazioni dei vigili del fuoco (interruttore a chiave Hall) |
| CPOM | Operazioni dei vigili del fuoco (Cabina interruttore a chiave) |
| SUR | Controllo del sovraccarico |
| COM | Controllo del carico completo |
| HS | funzione fuori servizio |
| ZP | segnale zona porta |
| RPH | Controllo della sequenza di fase |
| REV REV1 REV2 | Funzione di ispezione (sala macchine) Funzione di ispezione (Tetto Cabina) Funzione di ispezione (PIT) |
| REM REM1 REM2 | Ispezione su (sala macchine) Ispezione in alto (Tetto Cabina) Ispezione su (PIT) |
| RED RED1 RED2 | Ispezione giù (sala macchine) Ispezione giù (Tetto Cabina) Ispezione a terra (PIT) |
| TH1 TH2 | Controllo del sensore di temperatura del motore (olio) |
| IEME | Emergenza (mancanza di alimentazione) |
| PME | Selettore PME (evacuazione di emergenza) |
| AGH AGB | Interruttore di decelerazione superiore Interruttore di decelerazione inferiore |
| FAS FAI | Sensori di posizione (nessun sistema di posizionamento a encoder) |
| E511 | Ingresso opzionale per vano Access |
| BYPL BYPC | Sicurezza della porta Selettore di bypass |
| BRA | Pulsante di apertura della porta (ingresso A) |
| CEA | Ingresso fotocellula A |
| FOA | Ingresso del finecorsa di apertura della porta A |
| FFA | Ingresso del finecorsa di chiusura della porta A |
| BRB | Pulsante di apertura della porta (ingresso B) |
| CEB | Ingresso fotocellula B |
| FOB | Ingresso del finecorsa di apertura della porta B |
| FFB | Fine corsa chiusura (Porta B) |
| BR1 | Interruttore di monitoraggio del freno 1 |
| BR2 | Interruttore di monitoraggio del freno 2 |
| IN_A IN_D | Monitorare il circuito UCM |
| Uscita | Descrizione |
|---|---|
| VHS | Uscita - illuminazione fuori servizio |
| RMV | Uscita - comando di velocità intermedia |
| BRK | Uscita - Comando del freno |
| MTR | Uscita - Comando del motore |
| YBRK | Uscita - Comando del freno (VVVF) |
| ISO | Uscita - Comando di livellamento |
| RGV | Uscita - comando ad alta velocità |
| RPV | Uscita - comando a bassa velocità |
| RMO | Uscita - comando di corsa verso l'alto |
| RDE | Uscita - comando di discesa |
| LTMP | Uscita - comando luce cabina ascensore limitato nel tempo |
| CAM | Uscita - comando rampa di ritiro |
| OEM | Uscita - comando di emergenza |
| CCF | Uscita - Corto circuito di fase del motore |
| J20 | Uscita - programmabile (connettore J20) |
| DSA | Uscita - disattivazione degli allarmi |
| 511B | Uscita - Buzzer Norm 511 |
| 511L | Uscita - Norm 511 Luce |
| 212B | Uscita - Norm 212 Buzzer |
| FLD | Comando delle frecce verso il basso |
| FLM | Uscita - comando frecce in alto |
| GNGD | Uscita - comando gong verso l'alto |
| GNGM | Uscita - comando gong verso il basso |
| BIP | Uscita - Segnalazione BIP in cabina |
| PWR | Comando di alimentazione del modulo UCM |
| ENAB | Comando di abilitazione del modulo UCM |
| ROA | Uscita - comando apertura porta (ingresso A) |
| RFA | Uscita - comando chiusura porta (ingresso A) |
| ROB | Uscita - comando apertura porta (ingresso B) |
| RFB | Uscita - comando chiusura porta (ingresso B) |
| L-RED | Segnale semaforico 81-20/21 |
| L-GREEN | Segnale semaforico 81-20/21 |
| BUZZER | Segnale acustico per il bypass 81-20 |
Parametri di descrizione della tabella VVVF IN-OUT
| Segnale | Descrizione |
|---|---|
| EN | Ingresso digitale di abilitazione (morsetto EN) |
| FWD | Ingresso digitale verso l'alto (morsetto FWD) |
| REV | Ingresso digitale verso il basso (morsetto REV) |
| X1 | Ingresso digitale ad alta velocità (morsetto X1) |
| X2 | Ingresso digitale velocità REV (morsetto X2) |
| X3 | Ingresso digitale a bassa velocità (morsetto X3) |
| X4 | Ingresso digitale (morsetto X4) |
| X5 | ingresso digitale (morsetto X4) |
| X6 | Ingresso digitale (morsetto X6) |
| X7 | Ingresso digitale (morsetto X7) |
| X8 | Ingresso digitale di emergenza (morsetto X8) |
| 0,0 V | Ingresso analogico VVVF (morsetti 11-12) |
| Encoder | Ingresso VVVF dell'encoder (anello chiuso) |
| PRINCIPALE | Versione del firmware VVVF |
| Y1 | Uscita digitale (morsetto Y1) |
| Y2 | Uscita digitale (morsetto Y2) |
| Y3 | Uscita digitale (morsetto Y3) |
| Y4 | Uscita digitale (morsetto Y4) |
| Y5A/C | Relè di comando del freno (morsetto Y5) |
| 30 A/B/C | Relè (morsetto 30 A/B/C) |
| ALM | Segnalazione allarme VVVF |
| RST | Reset VVVF |
| ACC | Accelerazione |
| DEC | Decelerazione |
| Fout | Frequenza di uscita |
| Vout | Tensione di uscita |
| Iout | Corrente di uscita |
| Imax | Corrente di uscita massima |
"Menu "Configurazione
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Configurazione > |
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Operazioni temporanee | Modo di funzionamento temporaneo del sistema | ◄► (Scelta) | No; Sì | No |
| Test | Per facilitare i controlli e l'avvio dell'installazione. Per la descrizione, fare riferimento all'allegato II. | |||
| Codice? | Protezione con password per accedere alla programmazione | ◄► (Cambiare i caratteri) ▲▼ (Seleziona i caratteri) | 8 caratteri (0 - 9; A - Z; a - z ) | nessuna password |
| Configurazione | Tipo di configurazione del cablaggio: -) Filo standard morsetti (Cabina e piani); -) Comm. seriale nella cabina dell'ascensore, 1 linea /piano connettori a piani; -) Filo morsetti nella cabina dell'ascensore, comunicazione seriale a piani (moduli BDU); -) Comunicazione seriale per la cabina dell'ascensore e piani | ◄► (Scelta) | Cabina & Fl. STD; Cabina SER. / Fl. RJ45; Cabina STD. / Fl. BDU; Cabina SER. / Fl. BDU | Cabina SER / Fl. RJ45 |
| Tipo di controllo | Tipo di controllo per l'ascensore | ◄► (Scelta) | -SAPB; registrazione -SAPB -SAPB pressione costante -Collettivo giù; -Collettivo completo; | SAPB; |
| Guida | Tipo di trazione: -) Trazione VVVF -) Idraulica - Motore diretto (Dir): Utilizzabile anche in caso di VVF attivati solo in direzione UP. -) Idraulico - Avviamento graduale del motore (S-S): -) Idraulico - Motore Star Delta (Y-D): -) Idraulico - Motore con inverter (VVF): Contattori motore attivati in direzione SU e GIÙ. | ◄► (Scelta) | Trazione Dir idraulico Idraulico S-S Idraulico Y-D Idraulico VVF | Trazione |
| No. di piani | Numero di piani dell'installazione | ▲▼ (aumento/diminuzione) | 2 <-> 16 (std.) 2 <-> 32 (solo BDU) | 2 |
| Ri-livellamento | Non presente: Nessun riequilibrio Tipo 1: (porta aperta o chiusa). Questa impostazione è indicata per gli impianti di trazione per una buona precisione di arresto. Il livellamento si attiva quando la cabina dell'ascensore lascia la sua posizione "perfettamente a piano", cioè quando una delle due travi si interrompe. Il livellamento termina quando entrambe le travi sono libere. ATTENZIONE: questa regolazione non è adatta alle installazioni idrauliche a causa del rischio di effetto "pompaggio" (la cabina dell'ascensore scivola verso il basso dopo l'arresto) Tipo 2: (aprire o chiudere la porta). Questa impostazione è indicata per le installazioni idrauliche e funziona come nel tipo 1, tranne che le due travi devono essere interrotte prima che inizi il ri-livellamento. Il livellamento termina quando le due travi sono libere. ATTENZIONE: si consiglia l'uso di sensori con distanza ridotta tra le travi (TMS03 = 20 mm). Tipo 3: Livellamento 1 raggio porta aperta 2 raggi porta chiusa. Questa impostazione permette il livellamento 1 raggio, piano porta aperta (luce cabina ascensore accesa) e livellamento 2 raggi, piano porta chiusa (luce cabina ascensore spenta). ATTENZIONE: per far funzionare la porta di livellamento aperta, indipendentemente dall'opzione scelta, è necessario derivare la sicurezza della porta, utilizzando un sistema approvato. Nota: con il sistema di posizionamento Encoder, viene visualizzata la distanza di attivazione del ri-livellamento | ◄► (Scelta) | Non presente Tipo 1 Tipo 2 Tipo 3 | Non presente |
| Principale piano | Posizione del principale piano (tutte le chiamate sotto questo piano sono servite solo verso l'alto (solo verso il basso collettivo) | ▲▼ (aumento/diminuzione) | 0 <-> Piano No. | 0 |
| Tempo di guasto a bassa velocità | Tempo prima dell'attivazione dell'errore di bassa velocità (bassa velocità troppo lunga) | ▲▼ (aumento/diminuzione) | 7 s <-> 40 s | 7 s |
| Tempo di esecuzione | Tempo prima dell'attivazione dell'errore di funzionamento | ▲▼ (aumento/diminuzione) | 20 s <-> 45 s | 20 s |
| Tipo di installazione | Tipo di installazione (Simplex / Multiplex / Multiplex LIGHT) Multiplex LIGHT ha una linea BDU singola condivisa per due ascensori con un cablaggio di sinalizzazione dedicato. | ◄► (Scelta) | Simplex; Multiplex; Multiplex LIGHT | Simplex |
| Configurazione multiplex | Configurazione multiplex: Lift No.(LN); pulsanti Line (PBL); Piani in multiplex; Offset. Per la descrizione, fare riferimento alle soluzioni Multiplex. | ◄► (Selezionare il parametro) ▲▼ (Cambia valore) | - Numero di ascensore (LN): 1<->4 - Linea PushButtons (PBL): 0(1 linea)<->3(4 Linee) | (LN).(PBL): 1.0 |
| - Piani: 2 <-> 16 [32] - Ofst 0 <-> N° piani | Flrs. : 2 Ofst : 0 |
|||
| Multiplex Chiama | Nelle installazioni multiplex una chiamata piano può essere differenziata con una pressione lunga pulsante (più di 3 secondi): a) L'installazione con parametro "Lift No (LN)" più basso (per esempio se c'è un'installazione duplex con una cabina grande per disabili e una più piccola, la maggiore deve essere impostata come "1" e l'altra come "2"; b) In un sistema di "distribuzione asimmetrica piano ", l'impianto che può raggiungere il livello più basso/più alto. | ◄► (Scelta) | No (0, 1, 2, 3) Sì (0, 1, 2, 3) | No |
"Menu "Porte
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Porte > |
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Rampa di ritorno su | Tempo prima dell'attivazione della rampa di ritiro | ▲▼ (aumento/diminuzione) | 0,1 s <-> 9,9 s | 0,1 s |
| Rampa di ritorno spenta | Tempo prima della disattivazione della rampa di ritiro | ▲▼ (aumento/diminuzione) | 0,1 s <-> 9,9 s | 0,1 s |
| Tempo di guasto della serratura | Tempo prima dell'attivazione del guasto della serratura | ▲▼ (aumento/diminuzione) | 2 s <-> 60 s | 15 s |
| Ritardo di apertura della porta | Tempo prima dell'apertura della porta - per la porta automatica | ▲▼ (aumento/diminuzione) | 0,1 s <-> 9,9 s | 0,5 s |
| Tempo di parcheggio con porta aperta | Tempo di parcheggio dell'ascensore con porta aperta (in sec.) | ▲▼ (aumento/diminuzione) | 1 s <-> 30 s | 7 s |
| Chiusura con le chiamate | Tempo (in sec.) prima che la porta si chiuda in caso di chiamate registrate | ▲▼ (aumento/diminuzione) | 1 s <-> 60 s | 2 s |
| Porte Nb. | Numero e tipo di porte | ◄► (Selezione) | -1 porta -2 porte simult. -2 porte sel. -2 porte sel+passaggio | 1 accesso |
| Tipo Porta A | Selezione del tipo di porta per l'ingresso A: 1) Manuale / Non presente: porte manuali su piani, porte della cabina dell'ascensore manuali o non presenti; 2) Cabina indipendente: porte manuali su piani, porte di cabina dell'ascensore indipendenti; 3) Cabina automatico: porte manuali su piani, porte della cabina dell'ascensore automatiche; 4) Combined auto: porte automatiche nella cabina dell'ascensore e a piani | ◄► (Selezione) | Manuale / non presente; Cabina indipendente; Cabina automatico; Combinato Auto | Auto combinata |
| Porta A con finecorsa | Presenza di un finecorsa per la porta A (non presente per le porte manuali e indipendenti) | ◄► (Selezione) | No; Sì (NO) Sì (NC) | No |
| Selezionare la porta A a piano | Configurazione della porta A per ogni piano: impostare l'accesso a ogni piano e aprire o chiudere il parcheggio della porta su piano (per le porte automatiche) | ◄► (Selezione) ▲▼ (Cambiamento piano) | No; Pkg. Chiusura porta; Pkg. Porta aperta | Pkg. Chiusura della porta; |
| Tempo di apertura/chiusura della porta A | Porta A senza finecorsa: tempo di apertura/chiusura della porta | ▲▼ (aumento/diminuzione) | 1 s <-> 60 s | 10 s |
| Ritardo di avvio della porta A | Porta A manuale: tempo prima dell'inizio | ▲▼ (aumento/diminuzione) | 0,1 s <-> 9,9 s | 2,0 s |
| Porta scorrevole A | Porta A con finecorsa: tempo prima dell'errore di slittamento | ▲▼ (aumento/diminuzione) | 1 s <-> 60 s | 10 s |
| Porta A alimentata | Porta A alimentata durante la corsa. Non considerato per porte manuali o indipendenti | ◄► (Selezione) | No Sì Sì AT40 | No |
| Tipo Porta B | Selezione del tipo di porta per l'ingresso B (vedi Tipo di porta A): | ◄► (Selezione) | Manuale / non presente; Cabina indipendente; Cabina automatico; Combinato Auto | Auto combinata |
| Porta B con finecorsa | Presenza di un finecorsa per la porta A (non presente per le porte manuali e indipendenti) | ◄► (Selezione) | No; Sì | No |
| Selezionare la porta B a piano | Configurazione della porta A per ogni piano: impostare l'accesso a ogni piano e aprire o chiudere il parcheggio della porta su piano (per le porte automatiche) | ◄► (Selezione) ▲▼ (Cambiamento piano) | No; Pkg. Chiusura porta; Pkg. Porta aperta | Pkg. Chiusura della porta |
| Tempo di apertura/chiusura della porta B | Porta B senza finecorsa: tempo di apertura/chiusura della porta | ▲▼ (aumento/diminuzione) | 1 s <-> 60 s | 10 s |
| Ritardo di avvio della porta B | Porta B manuale: tempo prima dell'inizio | ▲▼ (aumento/diminuzione) | 0,1 s <-> 9,9 s | 2,0 s |
| Porta scorrevole B | Porta B con finecorsa: tempo prima dell'errore di slittamento | ▲▼ (aumento/diminuzione) | 1 s <-> 60 s | 10 s |
| Porta B alimentata | Porta B alimentata durante la corsa. Non considerato per porte manuali o indipendenti | ◄► (Selezione) | No Sì Sì AT40 | No |
| Apertura avanzata | Parametro per l'apertura anticipata della porta (l'apertura inizia prima dell'arresto della cabina dell'ascensore). | ◄► (Selezione) | No; Sì | No |
| Tipo di fotocellula | Parametro per selezionare il tipo di fotocellula: Fotocellula NO: il contatto si apre se il raggio è libero. Il contatto si chiude se il raggio è interrotto. I contatti di shock, fotocellula e porta aperta devono essere cablati in parallelo. Fotocellula NC: opposto della fotocellula NO. I contatti di shock, fotocellula e porta aperta devono essere cablati in serie. NOTA: I contatti di shock, fotocellula e porta aperta devono essere tutti dello stesso tipo (NO o NC) | ◄► (Selezione) | NO; NC | No |
| Tempo di contatto della porta | Tempo di attesa prima di iniziare un viaggio (per il contatto di sicurezza della vecchia porta) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,1 s |
"Menu "Segnali
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Segnali > |
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Cabina priorità | Tempo della cabina dell'ascensore su piano senza direzione prima di prendere le chiamate di atterraggio. In caso di porte automatiche combinate, il tempo inizia quando le porte si sono chiuse e i contatti di shock, fotocellula e riapertura non sono attivati | ▲▼ (aumento/diminuzione) | 2 s <-> 30 s | 10 s |
| Piano registrazione delle chiamate | Impostare il lampeggiamento per i pulsanti piano al momento della registrazione | ◄► (Selezione) | Permanente; Lampeggiante a piani | Permanente |
| Uscita AUX | Selezione del tipo di uscita sulle schede a 16 relè. NOTA: le configurazioni 1 filo/piano e 1 filo/piano HYD sono disponibili solo sulla prima scheda 16RL. Dopo la configurazione delle due schede AUX è possibile impostare le uscite su BDU (OUT-1 e OUT-2). | ◄► (Selezione) ▲▼ (modifica del valore) | 1 filo per piano; Cabina a piano; Piano luce; Gray indicatore; Indicatore a 9 segmenti; L'ascensore sta arrivando; 1 filo per piano HYD | 1 filo per piano |
| Ingressi BDU Tipo 0 = Cabina su piano e Fuori Servizio Tipo 1 = Frecce Tipo 2 = Cabina a piano e Cabina è in arrivo Tipo 3 = Display a 3 fili | Tipo 0 Tipo 1 Tipo 2 Tipo 3 | Tipo 0 | ||
| Designazione automatica piano | Impostazione automatica dei caratteri numerici per gli indicatori di posizione seriali. Il valore aumenta/diminuisce automaticamente ad ogni piano a partire da Lowest piano | ▲▼ (aumento/diminuzione) | -9 <-> 30 | Fl. più basso: 0 |
| Manuale piano designazione | Impostazione manuale dei caratteri alfanumerici per gli indicatori di posizione seriali. L'impostazione deve essere fatta per ogni piano | ◄► (Selezione) ▲▼ (modifica del valore) | - ; 0 <-> 9 ; A <-> Z | |
| Innesco su PV | È possibile avviare il trigger (sintetizzatore vocale / frecce di direzione successiva) sul punto di decelerazione (Sì) o su piano arrivo (No). | ◄► (Selezione) | No sì | No |
| Frecce di prossima direzione | In caso di attivazione del parametro, le uscite delle frecce si attivano solo quando l'ascensore si ferma su piano (o al rallentamento se il parametro di attivazione su PV è attivo). | ◄► (Scelta) | No sì | No |
| Ritardo LTMP | Questa funzione gestisce il ritardo tra una chiamata piano/ cabina dell'ascensore e l'accensione della luce. L'uscita è disattivata XX secondi dopo che la chiamata è stata servita. 0 sec significa nessun timer attivo (luce ON) | ▲▼ (aumento/diminuzione) | 0 s <-> 240 s | 1 sec. |
| Ritardo EME | Questa funzione gestisce il ritardo tra il segnale di black out (IEME) e il comando di uscita (OEME) prima della commutazione del sistema nella procedura automatica di emergenza. | ▲▼ (aumento/diminuzione) | 0 s <-> 30 s | 0 sec. |
| Cicalino 81-21 | Per l'installazione 81-21: utilizzare il cicalino acustico dell'81-20 (porta di bypass) sulla parte superiore della cabina dell'ascensore come allarme acustico quando le protezioni non sono in posizione attiva. | ◄► (Scelta) | No sì | No |
"Menu "Caratteristiche speciali
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Caratteristiche speciali > |
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Ripristino in | Direzione di marcia durante la procedura di reset | ◄► (Selezione) | 2 s <-> 30 s | 10 s |
| Limiti di viaggio nell'ispezione | Valido solo per il sistema di posizionamento FAI/FAS. Impostazioni per i limiti di spostamento durante la modalità di ispezione. Se la traslazione è programmata oltre i limiti, il sito quadro non consente alcun movimento oltre l'alto/basso piani. | ◄► (Selezione) | Fino a AGB/AGH; Oltre AGB/AGH | Fino a AGB/AGH |
| Vigili del fuoco | (Fare riferimento alla procedura di programmazione delle operazioni antincendio) Tipo di operazioni antincendio (se presenti) e relativi parametri (livello e lato di accesso del servizio antincendio, tipo di contatto chiave POM e CPOM); scelta della relativa norma applicabile: -) Norma NF P82-207 (Francia); -) EN 81-72 (a): nessun interruttore a chiave FF della cabina dell'ascensore; -) EN 81-72 (b): con interruttore a chiave FF della cabina dell'ascensore; | ◄► (Selezionare il campo) ▲▼ (Cambia valore) | Non presente; NF P82-207; EN 81-72 (a); EN 81-72 (b) EN 81-73 DM 15/09/2005 (IT) | Non presente |
| Rilevamento del fuoco | Parametri per il rilevamento di un incendio su piani. Quando viene rilevato un incendio: - se l'ascensore si trova su un piano diverso da quello in cui è stato rilevato l'incendio, tutte le chiamate registrate da/verso questo piano vengono annullate; - se l'ascensore è al piano dove è stato rilevato l'incendio, il quadro blocca l'apertura delle porte, chiude le porte (se aperte al momento del rilevamento dell'incendio) e manda la cabina dell'ascensore in un luogo sicuro piano | ◄► (Selezione) | No; Sì | No |
| Registrazione del pulsante di arresto | Il sistema registra il fuori servizio (pressione del pulsante STOP). È anche possibile impostare il ritardo per evitare il movimento simultaneo nelle installazioni alimentate con un generatore. | ◄► (Selezione) | No; Sì | No |
| EN 81-20 | Impostazione del sistema secondo EN 81-20 | ◄► (Selezione) | No; Sì | No |
| Guasto antinfortunistico | Parametro per il rilevamento del guasto antinfortunistico (numero di fermate senza attivazione della fotocellula dopo il quale tutte le chiamate della cabina dell'ascensore vengono annullate) | ◄► (Selezione) ▲▼ (Nessuna chiamata) | No; Sì 2 <-> 10 | No 3 |
| Fuori servizio piano | Piano per fuori servizio. Parcheggio piano quando l'ingresso HS è abilitato. | ▲▼ (aumento/diminuzione) | 0 <-> Piano No: | 0 |
| Ritorno automatico | Parametri per il ritorno automatico della cabina dell'ascensore su piano: Ritorno piano e tempo di attesa minimo prima del ritorno automatico | ◄► (Selezionare il parametro) ▲▼ (Cambia valore) | No 0 <-> Piano No: 1 min <-> 60 min | No 0 15 min. |
| Zone di ritorno | Impostazioni avanzate per il ritorno su piano alle ore/giorni programmati: -) Giorno (0 = tutti i giorni, 1 = lunedì ... 7 = domenica); -) Intervallo di tempo selezionato (4 intervalli ogni giorno); -) Ritorno piano; -) Ora di inizio; -) Ora di fine (tempo massimo: 7h 45 min); | ◄► (Selezionare il parametro) ▲▼ (Cambia valore) | ||
| Tempistica della zona R. | Tempi per le zone di ritorno selezionate | ◄► (Selezione) ▲▼ (modifica del valore) | No; Sì 1 s <-> 120 s | No 60 s |
| Chiamare la cancellazione a piano | Cancellazione di tutte le chiamate su piano dove la cabina dell'ascensore si ferma, senza controllo della direzione (solo per installazioni collettive complete) | ◄► (Selezione) | No; Sì | No |
| Controllo della deriva (FR) | Controllo della deriva (Francia) | ◄► (Selezione) | Non presente; Trazione; Macchina a tamburo | Nessuno |
| pulsante codice | Permette di programmare un codice a 4 cifre per le chiamate alle cabine dell'ascensore. Un codice di 4 cifre può essere assegnato a ciascun ingresso del pulsante di cabina BCx, corrispondente agli ingressi dei pulsanti di cabina dell'ascensore. Esempio: se il pulsante BC0 è associato al codice 0123, per riservare piano 0 da Cabina si può: a) tenere premuto il pulsante piano 0 per 3 secondi. b) Tutti i pulsanti di COP lampeggiano c) premere in sequenza i pulsanti corrispondenti ai codici BC0, BC1, BC2, BC3; Nota: Inserire un codice tra 0 e 9 corrispondente agli ingressi BC0 ÷ BC9 Il codice di programmazione "0 " abiliterà la funzione speciale Pent House | ◄► (Selezionare il campo) ▲▼ (Cambia valore) | ||
| Controle Temperatura ambiente | Controllare la temperatura nella sala macchine attraverso il sensore (se presente). Se la temperatura supera le soglie impostate per più di 30 secondi, il sistema ferma al piano e l'errore viene registrato. Il controllo è attivo solo durante il funzionamento normale o la priorità della cabina. Dopo aver impostato le due soglie, premendo Enter è possibile eseguire la calibrazione del sensore (premere subito Enter per mantenere la calibrazione corrente, altrimenti impostare il valore della temperatura ambiente e poi premere Enter). La prima soglia può essere impostata tra -10°C e +5°C mentre la seconda soglia può essere impostata tra +40°C e +75°C. | ◄► (Selezionare il campo) ▲▼ (Cambia valore) | Without; +5°C <=> +40°C | Senza |
| Automatico Chiamate | Quando l'ascensore è in modalità normale, "Chiamate automatiche" può essere attivato per eseguire un numero specifico di chiamate (fino a 120 chiamate o illimitate) a passi di un minuto. Tuttavia è possibile abilitare o meno la funzionalità delle porte (il sistema continuerà anche ad accettare piano chiamate che simulano le chiamate programmate, se abilitate). La funzione termina automaticamente quando le macchine vengono spente o se il sistema viene messo in modalità ispezione. | ▲▼ (aumentare/diminuire) ◄► (Seleziona le porte) | 0 <-> 120 ∞ 10 <-> 60 s Sì - No | 0 60s Sì |
| Monitor UCM | Emendamento A3. Configurare il tipo di monitor. Per la descrizione, fare riferimento al circuito UCM. | ▲▼ (aumento/diminuzione) ◄► (Scelta) | ||
| UCM | Installazione tipo 81-1 / 81-20 / 81-21 vano procedura di accesso e protezioni. Per la descrizione, fare riferimento al circuito UCM. | ▲▼ (aumento/diminuzione) ◄► (Scelta) | ||
| Arresto forzato | Se programmato, l'impianto si fermerà ad uno specifico piano ad ogni incrocio (alcuni hotel usano questa funzione). | ▲▼ (aumento/diminuzione) ◄► (Scelta) | ||
| Proteggere piano | Se è programmato un piano protetto, quando la cabina dell'ascensore raggiunge il piano, la porta non si apre, invece il monitor mostrerà le immagini provenienti dalla telecamera corrispondente a quel piano. Le porte possono essere aperte solo premendo il pulsante OPEN DOOR; se ciò non avviene, l'ascensore si sposta al precedente piano e quindi interrompe la modalità protetta piano (questa modalità operativa è possibile solo con il sistema di monitoraggio della DMG). | ▲▼ (aumento/diminuzione) ◄► (Scelta) | ||
| Lop priorità | Abilitazione della funzione di chiamata prioritaria piano . accoppiamento con scheda 16 IN (o ingressi chiave da BDU) | ◄► (Scelta) | No; Sì | No |
| Abilitazione piano | Abilitazione della funzione di abilitazione delle chiamate (per esempio, CARD Reader). In combinazione con la scheda 16 IN. Tipo 1: LOP abilitazione Per abilitare le chiamate, l'ingresso corrispondente della scheda 16 IN deve essere chiuso. Tipo 2: COP abilitazione Per abilitare le chiamate, l'ingresso corrispondente della scheda 16 IN deve essere chiuso Tipo 3: abilitare COP + LOP: per abilitare le chiamate, l'ingresso corrispondente della scheda 16 IN deve essere chiuso (disabilitando il piano) | ▲▼ (aumento/diminuzione) ◄► (Scelta) | No Tipo 1 Tipo 2 Tipo 3 | No |
| vano Protezione | Protezione del vano e delle porte. Per la descrizione, fare riferimento a vano protezione. | ▲▼ (Aumento/diminuzione | No Tipo 1 Tipo 2 Tipo 3 Tipo 4 | No |
| Pesatura del carico integrata | Abilitare la funzione per la pesatura del carico integrata. È obbligatoria una procedura di calibrazione(Test 22) | ◄► (Seleziona il campo) | No; Sì | No |
"Menu "Posizionamento del sistema
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Posizionamento > |
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Sistema di posizionamento | Tipo di sistema di posizionamento: con Encoder o tradizionale. Può essere modificato solo in Temporary Oper. Mode Nota: in caso di Encoder assoluto e vano di lunghezza superiore a 65 metri cambiare la risoluzione di Encoder = 2 nel menu di autosetting prima di iniziare la procedura di apprendimento manuale. | ◄► (Selezione) | FAI/FAS; Encoder in senso orario; Encoder in senso antiorario Encoder ELGO | FAI/FAS |
| Top PV | Posizione della decelerazione (passaggio in Low Speed) e numero di entrate | ▲▼ (aumento/diminuzione) | 2 <-> 6 | 5 |
| FV a piani | Posizione della decelerazione specifica per ogni piano | ◄► (Top PV) ▲▼ (Piano scelta) | Breve piano o 2<->6 0 <-> No. Piano | 5 tutti piani |
| Ritardo di livello breve | Tempo prima della decelerazione del livello breve (solo se è programmato un livello breve) | ▲▼ (aumento/diminuzione) | 0,00 s <-> 2,50 s | 0,00s |
| Top PV 2 Ritardo | Ritardo prima del passaggio alla velocità intermedia | ▲▼ (aumento/diminuzione) | 0,00 s <-> 2,50 s | 0,00s |
| Ritardo Dir.-BRK | VVVF: ritardo tra l'attivazione del senso di marcia e il comando di marcia (BRK) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Altri |
| OLEO: Star / Delta ritardo | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Stella/Delta 0,0 s - Altri |
|
| Ritardo BRK-S | Ritardo tra l'attivazione del comando BRK e il comando di velocità | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,00 s |
| Ritardo BRK-Dir. | Ritardo tra la disattivazione del comando di marcia e la disattivazione del senso di marcia (arrivare al piano) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Altri |
| Velocità di ispezione | Imposta la velocità di viaggio in ispezione | ◄► (Selezione) | Bassa velocità; Alta velocità | Bassa velocità |
| Emergenza BRK On | Parametro di modulazione dell'interruzione di emergenza (modificare solo se la scheda EME non è presente) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 5,0 s | 0,0s |
| Emergenza BRK Off | Parametro di modulazione dell'interruzione di emergenza (modificare solo se la scheda EME non è presente) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 5,0 s | 0,0s |
Tabella dei parametri: (Sistema di posizionamento dell'encoder):
| Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|
| Sistema di posizionamento | Tipo di sistema di posizionamento: con Encoder o tradizionale. Nota: può essere modificato solo in modalità operativa temporanea | ◄► (Selezione) | Encoder in senso orario; Encoder in senso antiorario Encoder ELGO | Encoder In senso orario |
| Autosetting | Inizio della procedura di autoapprendimento della posizione piano . Può essere modificato solo in modalità di funzionamento temporaneo. | ◄► (Selezione) | No; Sì | No |
| Piano Posizione | Valore di posizione per ogni piano | ▲▼ (aumento/diminuzione) ◄► (Selezione) | ||
| Accel. Tempo | Tempo di accelerazione. Tempo necessario per passare dalla velocità iniziale alla velocità di marcia. | ▲▼ (aumento/diminuzione) | 1,0 s <-> 5,0 s | 3,0 s |
| Boost di partenza | Velocità di partenza | ▲▼ (aumento/diminuzione) | 0 s <-> 10 s | 3 % |
| Fermare la spinta | Velocità finale (di arresto) | ▲▼ (aumento/diminuzione) | 0 s <-> 10 s | 4 % |
| Velocità massima | Velocità massima durante il viaggio | ▲▼ (aumento/diminuzione) | 5 s <-> 100 s | 100 % |
| Velocità di ispezione | Velocità di viaggio in modalità ispezione | ▲▼ (aumento/diminuzione) | 5 s <-> 100 s | 50 % |
| Velocità AGB/AGH | Velocità di marcia sui punti limite AGB/AGH. Stessa velocità adottata durante le operazioni di emergenza | ▲▼ (aumento/diminuzione) | 1 s <-> 15 s | 10 % |
| Ritardo Dir.-BRK | VVVF: ritardo tra l'attivazione della direzione di marcia e il comando BRK (avvio) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Altri |
| OLEO: Star / Delta ritardo | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Stella/Delta 0,0 s - Altri |
|
| Ritardo BRK-S | Ritardo tra l'attivazione del comando BRK e l'inizio della rampa di velocità analogica | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Altri |
| Ritardo BRK-Dir. | Ritardo tra la disattivazione del comando di marcia e la disattivazione della direzione di marcia (arresto su piano) | ▲▼ (aumento/diminuzione) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Altri |
| Emergenza BRK On | Parametro di modulazione della pausa di emergenza | ▲▼ (aumento/diminuzione) | 0,0 s <-> 5,0 s | 0,0s |
| Emergenza BRK Off | Parametro di modulazione della pausa di emergenza | ▲▼ (aumento/diminuzione) | 0,0 s <-> 5,0 s | 0,0s |
| Monitor Encoder | Contiene informazioni su: Caratteristiche dell'encoder, lettura delle quote di rallentamento (R1D / R1S), di ri-livellamento (RRIPD / RRIPS) e di arresto della cabina (RLD / RLS) dove D indica la discesa mentre S la salita; infine contiene informazioni sulla lettura delle quote AGB / AGH e ZP. Nota: le quote R1D e R1S possono essere modificate spingendo Enter senza ripetere la procedura di autoapprendimento (per far sì che la distanza di rallentamento sia uguale in salita e in discesa). | |||
| Zona della porta | Lunghezza della zona della porta ZP in mm |
NOTA: Si prega di consultare il diagramma temporale al fine di questo manuale, per comprendere meglio alcuni significati dei parametri.
"Menu "VVVVF
Questo menu è disponibile solo quando un FUJI FRENIC LIFT VVVF è collegato a una scheda dell'ascensore di controllo.
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < VVVVF > |
| Cod. | Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|---|
| F03 | Velocità massima | Velocità massima del motore | ◄► (Selezione) ▲▼ (modifica del valore) | 150-3600 RPM | 1500 RPM |
| F05 | Tensione nominale | Tensione nominale del motore azionato dall'inverter | ◄► (Selezione) ▲▼ (modifica del valore) | 80-240 V (per le serie di classe 200V) | 230 V |
| 160-500 V (per le serie di classe 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa di accelerazione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-99,9 s | 1,8 s |
| F08 | Dicembre T2 | Rampa di accelerazione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-99,9 s | 1,8 s |
| F42 | Modalità di controllo | Modalità di controllo | ◄► (Selezione) ▲▼ (modifica del valore) | 0-1-2 | 0 (riduttori, anello chiuso) 1 (Azionamenti senza riduttore, anello chiuso) 2 (Riduttori, anello aperto) |
| E12 | Acc/dec T5 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selezione) ▲▼ (modifica del valore) | 0.00 - 99.9 s | 1,8 s | |
| C07 | Velocità di scorrimento | Velocità di scorrimento (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 4,0 Hz (Riduttori, anello aperto) 2,5 Hz (Riduttori, anello chiuso) 1,5 Hz (Azionamenti senza riduttore, anello chiuso) |
|
| C10 | Velocità media | Velocità del sistema in modalità ispezione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 25 Hz (Riduttori) 10 Hz (Azionamenti senza riduttore) |
|
| C11 | Alta velocità | Alta velocità per cambio di velocità a più passi (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 50 Hz (Riduttori) 20 Hz (Azionamenti senza riduttore) |
|
| P01 | Pali del motore | Numero di poli del motore | ◄► (Selezione) ▲▼ (modifica del valore) | Vedi piastra motore | 4 (Riduttori) 20 (Azionamenti senza riduttore) |
| P02 | Cappuccio nominale del motore | Potenza nominale del motore | ◄► (Selezione) ▲▼ (modifica del valore) | Vedi piastra motore | Funzione della dimensione dell'inverter |
| P03 | Curva nominale del motore | Intensità di corrente nominale del motore | ◄► (Selezione) ▲▼ (modifica del valore) | Vedi piastra motore | Funzione della dimensione dell'inverter |
| P04 | Autotuning del motore | Sintonizzazione automatica dei parametri del motore (solo per i motoriduttori) | ◄► (Selezione) ▲▼ (modifica del valore) | 0 (2 per attivare la procedura di auto tuning per i motoriduttori) | |
| P06 | M-No-Load Curr. | Corrente a vuoto del motore | ◄► (Selezione) ▲▼ (modifica del valore) | Impostazione tramite autotuning del motore (Riduttori) 0 A (azionamenti senza riduttore) |
|
| P12 | M-Rated Slip | Frequenza nominale di scorrimento del motore | ◄► (Selezione) ▲▼ (modifica del valore) | 0-15Hz | Impostato da Autotuning motore |
| L01 (*) | PG seleziona | Vedere regolazione dell'ascensore VVVF Frenic | ◄► (Selezione) ▲▼ (modifica del valore) | 0-5 | 0 (Riduttori) 4 (Azionamenti senza riduttore con encoder EnDat) 5 (Azionamenti senza riduttore con encoder sin-cos) |
| L02 (*) | Risoluzione PG | Risoluzione dell'encoder a impulsi (Impulso/giro) | ◄► (Selezione) ▲▼ (modifica del valore) | 360-60000 P/R | 1024 (Riduttori) 2048 (Azionamenti senza riduttore) |
| L19 | Curva a S 1 | Curva a S - 1 | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L24 | Curva a S 6 | Curva a S - 6 | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L25 | Curva a S 7 | Curva a S - 7 | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L26 | Curva a S 8 | Curva a S - 8 | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L27 | Curva a S 9 | Curva a S - 9 | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L82 | Freno su ritardo | Ritardo dall'attivazione dell'uscita BRKS | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10,00 S | 0,20 s |
| L83 | Ritardo di spegnimento del freno | Ritardo dalla disattivazione dell'uscita BRKS | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10,00 S | 0,10 s |
(*) - Non disponibile sul modello di inverter LM2C.
| Cod. | Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|---|
| F01 | Comando di velocità | Selezione del comando per la variazione di velocità | ◄► (Selezione) ▲▼ (modifica del valore) | 0=MULTISPEED 1=NR Analogico (non polarizzato) non disponibile | 0 (con sistema di posizionamento FAI/FAS) 1 (con sistemi di posizionamento Encoder) |
| F03 | Velocità massima | Velocità massima del motore | ◄► (Selezione) ▲▼ (modifica del valore) | 150-3600 RPM | 1500 RPM |
| F04 | Velocità nominale | Velocità nominale del motore (frequenza) | ◄► (Selezione) ▲▼ (modifica del valore) | 50 Hz | |
| F05 | Tensione nominale | Tensione nominale del motore azionato dall'inverter | ◄► (Selezione) ▲▼ (modifica del valore) | 80-240 V (per le serie di classe 200V) | 230 V |
| 160-500 V (per le serie di classe 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa di accelerazione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-99,9 s | 1,8 s |
| F08 | Dicembre T2 | Rampa di decelerazione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-99,9 s | 1,8 s |
| F09 | TRQ Boost | Aumento della coppia | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0-5,0 | 0,0 (fino a 7,5 kW e da 30 kW) 0,3 (da 11 kW a 22 kW) |
| F10 | OL elettronico | Protezione elettrica da sovraccarico | ◄► (Selezione) ▲▼ (modifica del valore) | 1 - 2 | 2 |
| F11 | Livello di sovraccarico | Protezione termica elettronica di sovraccarico del motore (valore in Ampere uguale alla dimensione dell'inverter) | ◄► (Selezione) ▲▼ (modifica del valore) | Da 1 a 200% della corrente nominale | 100 % |
| F12 | Tempo di sovraccarico | Costante di tempo termica | ◄► (Selezione) ▲▼ (modifica del valore) | 0,5 - 75,0 min. | 0,5 |
| F20 | Velocità del freno DC | Soglia di frequenza per DC INJECTION | ◄► (Selezione) ▲▼ (modifica del valore) | 0,2 Hz (Anello aperto) 0,0 Hz (anello chiuso) |
|
| F21 | Livello del freno DC | Soglia di intensità per DC INJECTION | ◄► (Selezione) ▲▼ (modifica del valore) | 50 % (Anello aperto) 0 % (Circuito chiuso) |
|
| F22 | Freno DC T | Tempo di INIEZIONE DC | ◄► (Selezione) ▲▼ (modifica del valore) | 1,0 s (Anello aperto) 0,0 s (anello chiuso) |
|
| F23 | Velocità di partenza | Velocità di partenza (in Hz) per l'inverter | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-150 | 0,50 Hz (Anello aperto) 0,00 Hz (anello chiuso) |
| F24 | Tempo di mantenimento | Tempo di mantenimento del funzionamento a velocità iniziale per l'inverter | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10 s | 0,8 s (FAI/FAS) 0,2 s (Encoder) |
| F25 | Velocità di arresto | Velocità di arresto (in Hz) per l'inverter | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0 Hz (FAI/FAS) 0,1 Hz (Encoder) |
|
| F26 | Suono del motore | Frequenza portante | ◄► (Selezione) ▲▼ (modifica del valore) | 15 kHz | |
| F42 | Modalità di controllo | Modalità di controllo | ◄► (Selezione) ▲▼ (modifica del valore) | 0-1-2 | 0 (Riduttori, anello chiuso) 1 (Azionamenti senza riduttore, anello chiuso) 2 (Riduttori, anello aperto) |
| F44 | Limitatore di corrente | Livello di attivazione del limitatore di corrente. % alla corrente nominale dell'inverter. Se il valore è "Auto", significa che non c'è limitazione di corrente. | ◄► (Selezione) ▲▼ (modifica del valore) | 100% <-> 230% o Auto | 200 % |
| E04 | Comando X4 | Ingresso X4 non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 25 | |
| E05 | Comando X5 | Ingresso X5 non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 25 | |
| E06 | Comando X6 | Ingresso X6 non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 25 | |
| E07 | Comando X7 | Ingresso X7 non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 25 | |
| E08 | Comando X8 | Ingresso X8 non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 63 | |
| E10 | Acc/dec T3 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E11 | Acc/dec T4 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E12 | Acc/dec T5 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E14 | Acc/dec T7 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selezione) ▲▼ (modifica del valore) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00 -99,9 s | 1,8 s | |
| E20 | Segnale Y1 | Uscita Y1 (transistor) non utilizzata | ◄► (Selezione) ▲▼ (modifica del valore) | 27 | |
| E21 | Segnale Y2 | Uscita Y2 (transistor) non utilizzata | ◄► (Selezione) ▲▼ (modifica del valore) | 27 | |
| E22 | Segnale Y3 | Uscita Y3 (transistor) non usata | ◄► (Selezione) ▲▼ (modifica del valore) | 27 | |
| E23 | Segnale Y4 | Uscita Y4 (transistor) non utilizzata | ◄► (Selezione) ▲▼ (modifica del valore) | 25 | |
| E30 | Velocità Arr. Hyst | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 0,48 Hz (motoriduttore) 0,1 Hz (Motore senza riduttore) |
|
| E31 | Velocità Det.Lev | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 48,33Hz | |
| E32 | Velocità Det Hyst | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 0,48 Hz (motoriduttore) 0,1 Hz (Motore senza riduttore) |
|
| E39 | Livello RRD | Direzione raccomandata in caso di emergenza (Non usato) | ◄► (Selezione) ▲▼ (modifica del valore) | 0% | |
| E61 | Ingresso analogico 12 | Funzione dell'ingresso analogico 12 | ◄► (Selezione) ▲▼ (modifica del valore) | 0-2 | 1 |
| E98 | Comando FWD | Funzione per la vite morsetto FWD | ◄► (Selezione) ▲▼ (modifica del valore) | 98 | |
| E99 | Comando REV | Funzione per la vite morsetto REV | ◄► (Selezione) ▲▼ (modifica del valore) | 99 |
| Cod. | Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Limitazione della coppia in caso di emergenza. Se il valore è "OFF", significa che non c'è limitazione di corrente. | ◄► (Selezione) ▲▼ (modifica del valore) | 0% <-> 100% o OFF | 0 |
| C02 | BATRY TL T | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0 s | ||
| C03 | Velocità della batteria | Velocità durante la corsa di emergenza | ◄► (Selezione) ▲▼ (modifica del valore) | 1,50 Hz | |
| C07 | Velocità di scorrimento | Velocità di scorrimento (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 4,0 Hz (Riduttori, anello aperto) 2,5 Hz (Riduttori, anello chiuso) 1,5 Hz (Azionamenti senza riduttore, anello chiuso) |
|
| C10 | Velocità media | Velocità del sistema in modalità ispezione (solo con sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 25 Hz (Riduttori) 10 Hz (Azionamenti senza riduttore) |
|
| C11 | Alta velocità | Alta velocità per cambio di velocità a più passi (sistema di posizionamento FAI/FAS) | ◄► (Selezione) ▲▼ (modifica del valore) | 50 Hz (Riduttori) 20 Hz (Azionamenti senza riduttore) |
|
| P01 | Pali del motore | Numero di poli del motore | ◄► (Selezione) ▲▼ (modifica del valore) | (vedi targhetta motore) | 4 (Riduttori) 20 (Azionamenti senza riduttore) |
| P02 | Cappuccio nominale del motore | Potenza nominale del motore | ◄► (Selezione) ▲▼ (modifica del valore) | (vedi targhetta motore) | Funzione della dimensione dell'inverter |
| P03 | Curva nominale del motore | Intensità di corrente nominale del motore | ◄► (Selezione) ▲▼ (modifica del valore) | (vedi targhetta motore) | Funzione della dimensione dell'inverter |
| P04 | Autotuning del motore | Sintonizzazione automatica dei parametri del motore (solo per i motoriduttori) | ◄► (Selezione) ▲▼ (modifica del valore) | 0 (2 per attivare la procedura di auto tuning per i motoriduttori) | |
| P06 | M-No-Load Curr. | Corrente a vuoto del motore | ◄► (Selezione) ▲▼ (modifica del valore) | Impostazione tramite autotuning del motore (Riduttori) 0 A (azionamenti senza riduttore) |
|
| P07 | M-%R1 | Motore (%R1) | ◄► (Selezione) ▲▼ (modifica del valore) | Impostazione tramite autotuning del motore (Riduttori) 5 % (azionamenti senza riduttore) |
|
| P08 | M-%X | Motore (%X) | ◄► (Selezione) ▲▼ (modifica del valore) | Impostazione tramite autotuning del motore (Riduttori) 10 % (azionamenti senza riduttore) |
|
| P09 | Guida M-Slip | Guadagno di compensazione dello scorrimento in percentuale allo scorrimento nominale (P12) al lati di guida | 0,0 - 200% | Impostato da Autotuning motore | |
| P10 | Frenata M-Slip | Guadagno di compensazione dello slittamento in percentuale allo slittamento nominale (P12) al lati di frenata | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0 - 200% | Impostato da Autotuning motore |
| P11 | M-Slip T | Valore del tempo di compensazione dello slittamento (fisso) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,2 s | |
| P12 | M-Rated Slip | Frequenza nominale di scorrimento del motore | ◄► (Selezione) ▲▼ (modifica del valore) | 0 - 15 Hz | Impostato da Autotuning motore |
| P60 | Resistenza di armatura - Rs | ◄► (Selezione) ▲▼ (modifica del valore) | Ohm | Secondo la tabella MX*** del motore | |
| P62 | Reattanza dell'asse q dell'armatura - Xs | ◄► (Selezione) ▲▼ (modifica del valore) | Ohm | Secondo la tabella MX*** del motore | |
| P63 | Tensione induttiva interfase - E | ◄► (Selezione) ▲▼ (modifica del valore) | V | Secondo la tabella MX*** del motore | |
| P65 | correzione della saturazione magnetica dell'induttanza dell'asse q | ◄► (Selezione) ▲▼ (modifica del valore) | % | Secondo la tabella MX*** del motore | |
| H04 | Azzeramento automatico Tempi | Azzeramento automatico (numero di volte) | ◄► (Selezione) ▲▼ (modifica del valore) | 10 | |
| H05 | Auto reset int | Auto-ripristino (intervallo di reset) | ◄► (Selezione) ▲▼ (modifica del valore) | 5 s | |
| H06 | Ventola di raffreddamento CTRL | Ritardo di spegnimento della ventola di raffreddamento (Il valore automatico significa che non c'è limite al controllo della ventola; la ventola è sempre accesa) | ◄► (Selezione) ▲▼ (modifica del valore) | 0 min. <-> 100 min. o Auto | 5 min |
| H57 | Curva a S 11 | Curva a S-11 | ◄► (Selezione) ▲▼ (modifica del valore) | 0 - 50% | 20% |
| H58 | Curva a S 12 | Curva a S-12 | ◄► (Selezione) ▲▼ (modifica del valore) | 0 - 50% | 20% |
| H64 | Tempo di mantenimento dello zero | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0 s (con sistema di posizionamento FAI/FAS) 0,8 s (con sistemi di posizionamento Encoder) |
||
| H65 | Tempo di avvio morbido | ◄► (Selezione) ▲▼ (modifica del valore) | 0,0 s (con sistema di posizionamento FAI/FAS) 0,0 s (con sistemi di posizionamento Encoder) |
||
| H67 | Tempo di attesa dello stop | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00 s (Anello aperto) 1,00 s (anello chiuso) |
||
| H96 | Monitoraggio dei freni | Abilita il monitor del freno | ◄► (Selezione) ▲▼ (modifica del valore) | 0-1 | 0 |
| H190 | Ordine del motore UVW | Sequenza fasi uscita motore | ◄► (Selezione) ▲▼ (modifica del valore) | 0-1 | 1 |
| Cod. | Parametro | Descrizione | Navigazione | Valori | Valore predefinito |
|---|---|---|---|---|---|
| L01 (*) | PG seleziona | Vedere regolazione dell'ascensore VVVF Frenic | ◄► (Selezione) ▲▼ (modifica del valore) | 0-5 | 0 (Riduttori) 4 (Azionamenti senza riduttore con encoder EnDat) 5 (Azionamenti senza riduttore con encoder sin-cos) |
| L02 (*) | Risoluzione PG | Risoluzione dell'encoder a impulsi (Impulso/giro) | ◄► (Selezione) ▲▼ (modifica del valore) | 360-60000 P/R | 1024 (Riduttori) 2048 (Azionamenti senza riduttore) |
| L03 (*) | P.P.Tuning | Vedere regolazione dell'ascensore VVVF Frenic | ◄► (Selezione) ▲▼ (modifica del valore) | ||
| L04 (*) | P.P.Offset | Offset della posizione del polo magnetico (angolo di offset) per azionamenti senza riduttore | ◄► (Selezione) ▲▼ (modifica del valore) | Impostazione automatica durante la messa a punto della pole position (L03) | |
| L05 (*) | Guadagno ACR P | ◄► (Selezione) ▲▼ (modifica del valore) | 1,5 | ||
| L07 (*) | Selezione automatica della sintonia dei poli | ◄► (Selezione) ▲▼ (modifica del valore) | Secondo la tabella MX*** del motore | ||
| L19 | Curva a S 1 | Da L19 a L28 specificano le zone con curva a S da applicare alle operazioni guidate da comandi di velocità multistep con accelerazione/decelerazione a curva a S. | ◄► (Selezione) ▲▼ (modifica del valore) | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|
| L20 | Curva a S2 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L21 | Curva a S 3 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L22 | Curva a S 4 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L23 | Curva a S 5 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L24 | Curva a S 6 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L25 | Curva a S 7 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L26 | Curva a S 8 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L27 | Curva a S 9 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L28 | Curva a S 10 | 20 % (Riduttori) 25 % (Azionamenti senza riduttore) |
|||
| L29 | SFO Hold T | Funzionamento breve Piano (tempo di mantenimento) Utilizzato solo per la modalità di posizionamento FAI-FAS | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00s. <-> 10,00s. o OFF | OFF |
| L30 | Velocità SFO | Breve Piano Funzionamento (velocità consentita) - NON UTILIZZATO | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00 s | |
| L36 (*) | ASR P Gain High | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 10,00 (Riduttori) 2,50 (Azionamenti senza riduttore) |
|
| L37 (*) | Guadagno ASR I Alto | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 0,100 | |
| L38 (*) | ASR P Gain Low | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 10,00 (Riduttori) 2,50 (Azionamenti senza riduttore) |
|
| L39 (*) | Guadagno ASR I Basso | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 0,100 | |
| L40 (*) | Interruttore Velocità 1 | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 5,00 (Riduttori) 1,00 (Azionamenti senza riduttore) |
|
| L41 (*) | Interruttore Velocità 2 | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | 10,00 (Riduttori) 2,00 (Azionamenti senza riduttore) |
|
| L42 (*) | Guadagno ASR-FF | ◄► (Selezione) ▲▼ (modifica del valore) | 0.000 - 10.000 s | 0.000 s | |
| L55 (*) | TB Ora di inizio | ◄► (Selezione) ▲▼ (modifica del valore) | 0.00 - 1.00 s | 0.20 s | |
| L56 (*) | TB Tempo di fine | ◄► (Selezione) ▲▼ (modifica del valore) | 0.00 - 20.00 s | 0.20 s | |
| L64 (*) | TB Digital 3 | ◄► (Selezione) ▲▼ (modifica del valore) | -200 - +200 % | 0 % | |
| L65 (*) | Funzionamento ULC | Carico sbilanciato Compensazione | ◄► (Selezione) ▲▼ (modifica del valore) | 0-1 | 1 |
| L66 (*) | Attivazione ULC | Compensazione del carico sbilanciato (Tempo di attivazione) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,01-2 s | 2,00 s |
| L68 (*) | Guadagno ULC ASR P | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 10 (FAI/FAS) 10 (Encoder) |
|
| L69 (*) | Guadagno ULC ASR I | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 0,01 (FAI/FAS) 0,01 (Encoder) |
|
| L73 (*) | APR P guadagno zero | Vedere Controllo del rollio e comfort di guida | ◄► (Selezione) ▲▼ (modifica del valore) | 0 (FAI/FAS) 0 (Encoder) |
|
| L74 (*) | Guadagno APR D | ◄► (Selezione) ▲▼ (modifica del valore) | 0.0 | ||
| L75 (*) | Tempo del filtro | ◄► (Selezione) ▲▼ (modifica del valore) | 0.000 s | ||
| L76 (*) | Costante ACR P | ◄► (Selezione) ▲▼ (modifica del valore) | 0.00 | ||
| L80 | Modalità di frenata | Modalità di uscita del controllo del freno (BRKS) | ◄► (Selezione) ▲▼ (modifica del valore) | 1-2 | 1 |
| L81 | Freno a livello | Corrente di uscita che attiva il segnale BRKS quando L80 = 2. | ◄► (Selezione) ▲▼ (modifica del valore) | 0,-200% della corrente a vuoto del motore | 100 % |
| L82 | Ritardo dell'accensione del freno | Ritardo dall'attivazione dell'uscita BRKS | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10,00 Sec | 0,20 s |
| L83 | Ritardo di spegnimento del freno | Ritardo dalla disattivazione dell'uscita BRKS | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-100 Sec | 0,10 s |
| L84 | BRKS controllare t | Tempo consentito tra l'uscita BRKS e l'ingresso BRKE (Er6) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10 sec | 0,00 s |
| L99 | AZIONE SEL | Non utilizzato | ◄► (Selezione) ▲▼ (modifica del valore) | ||
| L122 | Del. Op. Potenza d'ingresso Livello di rilevamento | ◄► (Selezione) ▲▼ (modifica del valore) | % | ||
| L124 | Del. Op. Dir. Calc. Timer di ritardo | ◄► (Selezione) ▲▼ (modifica del valore) | s. | ||
| L130 | Diametro della puleggia (Ds) | ◄► (Selezione) ▲▼ (modifica del valore) | mm | Secondo la tabella MX*** del motore | |
| L131 | Diametro dell'encoder (Ds) | ◄► (Selezione) ▲▼ (modifica del valore) | mm | Secondo la tabella MX*** del motore | |
| L132 | Banda di compensazione Theta | ◄► (Selezione) ▲▼ (modifica del valore) | deg | Secondo la tabella MX*** del motore | |
| L133 | Limitatore inferiore del guadagno di compensazione Theta | ◄► (Selezione) ▲▼ (modifica del valore) | Secondo la tabella MX*** del motore | ||
| L134 | Tempo di contraccolpo | Tempo di gioco (Quando L65 = 2) | ◄► (Selezione) ▲▼ (modifica del valore) | 0,00-10,00 s | 0 |
| L198 | Interruttore op. set 1 | BIT0 = È possibile fissare la frequenza portante a 16 kHz per tutta la gamma di velocità al fine di ridurre il rumore di guida. | ◄► (Selezione) ▲▼ (modifica del valore) | 0 | |
| L199 | Interruttore op. set 2 | Riservato. | ◄► (Selezione) ▲▼ (modifica del valore) | 0 |
(*) - Non disponibile sul modello di inverter LM2C.
NOTA: consultare il diagramma temporale per comprendere meglio alcuni parametri di significato.
"Menu "Parametri di registrazione
Nota: il salvataggio dei dati non è richiesto solo per l'emulazione di PBV3 quadri.
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Parametri di registrazione > |
| Piano 0 12:30:56 < Parametri di registrazione > | ----- ENTER ----> | Piano 0 12:30:56 < Registrare i parametri > Salvare i parametri | ----- ENTER ----> <----- ESC ------ | Piano 0 12:30:56 < Registrare i parametri > Salvare i parametri Sei sicuro? |
| ▲ ▼ | ENTRA ↓ |
|||
| Piano 0 12:30:56 < Registrare i parametri > Salvare i parametri Fine reg. |
||||
| Piano 0Floor 0 12:30:56 < Registrare i parametri > Azzeramento dei parametri | ----- ENTER ----> <----- ESC ------ | Piano 0Floor 0 12:30:56 < Registrare i parametri > Azzerare i parametri Sei sicuro? |
||
| ENTRA ↓ |
||||
| Piano 0Floor 0 12:30:56 < Registrare i parametri > Azzeramento dei parametri Fine reg. |
||||
"Menu "Orologio
| ----->>>>> | | ----->>>>> | Piano 0 - 12:30:56 < Orologio > |
- Da = Giorno
- Mo = Mese
- Yr = Anno
- D = Giorno della settimana (1=Lun)
- Hr = Ore
- Mn = Minuti

ATTENZIONE: In caso di spegnimento del sistema, il tempo viene salvato per mezzo di un supercondensatore (fino a 5 giorni senza alimentazione).
VVVF Frenic Lift Setting
- Procedura di tuning -
Selezionare "Menu di installazione".

Nella schermata apparirà:

Confermare con OK e selezionare "Machine / VVVF Autotuning":
Inserite il parametro richiesto e passate al successivo premendo la freccia destra.
L'elenco dei parametri VVVF è:
| Parametro | Descrizione | Motore senza ingranaggi | Motore a ingranaggi |
|---|---|---|---|
| P01 - Poli del motore | Inserire il numero del polo motore | X | X |
| F03 - Velocità massima | Inserire la velocità massima del motore [RPM] (piastra motore) | X | X |
| F04 - Corrente nominale | Inserire Velocità nominale del motore [Hz] (Piastra motore) | X | X |
| F05 - Tensione nominale | Inserire Tensione nominale del motore [V] (Piastra del motore) | X | X |
| P08 - M-%X | Inserire il valore 10 | X | |
| P07 - M-%R1 | Inserire il valore 5 | X | |
| P06 - M-No Load Curr. | Inserire il valore 0 [A] | X | |
| P03 - Corrente nominale del motore | Inserire la corrente nominale [A] (Piastra motore) | X | |
| P02 - Tappo nominale del motore | Inserire la potenza nominale [kW] (Piastra motore) | X | |
| C11 - Alta velocità | Inserire l'alta velocità [Hz] (Piastra motore) | X | |
| C10 - Velocità media | Inserire la velocità media [Hz] (Velocità di ispezione) | X | |
| C07 - Velocità di scorrimento | Inserire la bassa velocità [Hz] (10% di C11) | X | |
| L01 - Selezione PG | Impostare il tipo di encoder del motore: (schede opzionali VVVF) | X | X (*) |
| L02 - Risoluzione PG | Inserire la risoluzione dell'encoder del motore | X | X (*) |
(*) Solo anello chiuso
L'ultimo parametro è diverso a seconda del tipo di motore:
Motore GEARLESS:
 Selezionare 4 : Sintonia statica
Selezionare 4 : Sintonia staticaSelezionare 5 : Sintonia dinamica (solo se senza corde)
Motore a ingranaggi:
 Seleziona 3
Seleziona 3In caso di problemi, andate al menu Fault per identificare il problema (§ Motor Tuning Errors)
al fine della procedura, premere il pulsante su/giù e verificare la corretta direzione di movimento della cabina dell'ascensore; se non è corretta, invertire i valori dei parametri E98 e E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Specifiche dell'encoder | Scheda encoder | Motore | |
| A/B Canale di uscita | Segnale assoluto | |||
| 0 | Collettore aperto / Push-Pull | = | OPC-PG3 | IM |
| Driver di linea | = | OPC-PMPG | ||
| 1 | Collettore aperto / Push-Pull | Z | OPC-PG3 | IM & PMSM |
| 4 | Differenziale sinusoidale (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS o OPC-PSH | PMSM |
| 5 | Differenziale sinusoidale (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Differenziale sinusoidale (1Vpp) | BISS-C (Sendix 5873) | OPC-PS o OPC-PSH | PMSM |
| 7 | Differenziale sinusoidale (1Vpp) | SSI (ECN1313) | OPC-PS o OPC-PSH | PMSM |
| 8 | Differenziale sinusoidale (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Codice | Descrizione | |
|---|---|---|
| OC1 | Sovracorrente durante l'accelerazione | La corrente di uscita momentanea dell'inverter ha superato il livello di sovracorrente. |
| OC2 | Sovracorrente durante la decelerazione | |
| OC3 | Sovracorrente durante il funzionamento a velocità costante | |
| EF | Guasto a terra | La corrente zero-fase causata da un guasto a terra nel circuito di uscita ha superato il limite consentito. (30kW o superiore) |
| OV1 | Sovratensione durante l'accelerazione | La tensione del bus del circuito intermedio ha superato il livello di rilevamento della sovratensione livello. |
| OV2 | Sovratensione durante la decelerazione | |
| OV3 | Sovratensione durante il funzionamento a velocità costante | |
| LV | Sottotensione | La tensione del bus CC è scesa al di sotto del livello di rilevamento dell'undervolt. age |
| Lin * | Perdita di fase in ingresso | Si è verificata una perdita di fase in ingresso o la tensione interfase era grande. |
| OH1 | Surriscaldamento del dissipatore di calore | La temperatura intorno al dissipatore di calore è aumentata in modo anomalo. |
| OH2 | Allarme esterno | Il THR dell'allarme esterno è stato inserito. (quando il THR "Enable external alarm trip" è stato assegnato a qualsiasi ingresso digitale morsetto) |
| OH3 | Surriscaldamento interno dell'inverter | La temperatura all'interno dell'inverter ha superato il limite consentito. |
| OH4 | Protezione del motore (termistore PTC/NTC) | La temperatura del motore è aumentata in modo anomalo. |
| DBH | Surriscaldamento del registro dei freni | La temperatura della resistenza di frenatura ha superato il limite consentito. |
| OL1 | Sovraccarico del motore 1 | La protezione termica elettronica per il rilevamento del sovraccarico del motore è stata attivata. |
| OLU | Sovraccarico dell'inverter | La temperatura all'interno dell'IGBT è aumentata in modo anomalo. |
| OS | Prevenzione della velocità eccessiva | La velocità del motore è superiore alla velocità massima * L32. |
| PG | Cablaggio rotto nel PG | La velocità del motore è superiore alla velocità massima * L32. |
| nrb | Errore di rottura del filo NTC | Rilevata una rottura del filo nel circuito di rilevamento del termistore NTC. |
| Er1 | Errore di memoria | Si è verificato un errore durante la scrittura dei dati nella memoria dell'inverter memoria. |
| Er2 | Errore di comunicazione della tastiera | Si è verificato un errore di comunicazione tra la chiave e l'inverter. pad |
| Er3 | Errore della CPU | Si è verificato un errore della CPU o un errore LSI. |
| Er4 | Errore di comunicazione dell'opzione | Si è verificato un errore di comunicazione tra la scheda opzionale collegata la scheda opzionale collegata e l'inverter. |
| Er5 | Errore di opzione | È stato rilevato un errore dalla scheda opzionale collegata (non dal l'inverter). |
| Er6 | Protezione del funzionamento | È stata tentata un'operazione errata. |
| Er7 | Errore di sintonizzazione | La sintonizzazione automatica o la sintonizzazione Magnetic Pole Position Offset è fallita, con conseguenti risultati di sintonizzazione anormali. |
| Er8 | Errore di comunicazione RS-485 (porta 1) | Si è verificato un errore di comunicazione durante la comunicazione RS-485 la comunicazione. |
| ErP | Errore di comunicazione RS-485 (porta 2) | |
| OPL | Perdita di fase in uscita | Si è verificata una perdita di fase in uscita. |
| ErE | Disadattamento della velocità | La velocità di riferimento e la velocità di rilevamento sono diverse. |
| ErF | Errore di salvataggio dei dati durante la sottotensione | Quando la protezione da sottotensione è stata attivata, l'inverter non è riuscito a salvare i dati, mostrando questo errore. |
| ErH | Errore hardware | L'LSI sul circuito stampato di alimentazione non ha funzionato correttamente a causa del rumore, ecc. |
| Ert | Errore di comunicazione CAN open | Si è verificato un errore di comunicazione durante la comunicazione CANopen. |
| ECF | EN1, EN2 morsetti errore del circuito | Un'anomalia è stata diagnosticata nel circuito EN1, EN2 morsetti . |
| Ot | Sopra la corrente di coppia | La corrente della coppia di riferimento è diventata eccessiva. |
| DBA | Transistor di frenatura rotto | Rilevamento di un'anomalia nel transistor del freno |
| bbE | Conferma del freno | L'inverter rileva la mancata corrispondenza tra il segnale di controllo del freno e il segnale di rilevamento del freno (feedback). |
| Eo | EN1, EN2 morsetti chattering | Rilevata collisione tra l'uscita ENOFF e l'ingresso EN1/EN2 morsetti. |
| ECL | Errore logico personalizzabile | Un errore di configurazione della logica personalizzabile ha causato un allarme. |
| OH6 | Surriscaldamento della resistenza di carica | La temperatura della resistenza di carica all'interno dell'inverter ha superato il limite consentito. |
| rbA | Salvataggio tramite allarme dei freni | Non viene rilevato alcun movimento durante l'operazione di salvataggio tramite il comando del freno. |
| tCA | Raggiungere il numero massimo di viaggi contatore | Il numero di cambi di direzione del viaggio ha raggiunto il livello preimpostato. |
| SCA | Errore di controllo del cortocircuito | L'inverter rileva la mancata corrispondenza tra il segnale di controllo del cortocircuito e il segnale di rilevamento del cortocircuito (feedback). |
| LCO | Sovraccarico della cella di carico | La funzione della cella di carico ha rilevato una situazione di sovraccarico mediante del livello preimpostato. |
| Codice | Nome dell'allarme | Sottocodice | Descrizione |
|---|---|---|---|
| OC1 | Sovracorrente durante l'accelerazione | 1 | Protezione da sovracorrente (interruzione OCT) - Sovracorrente normale |
| 2 | Protezione da sovracorrente (interruzione OCL) - Sovracorrente normale | ||
| OC2 | Sovracorrente durante la decelerazione | 3 | Protezione da cortocircuito - Sovracorrente all'avvio |
| 4 | Protezione contro i guasti a terra - Sovracorrente all'avvio | ||
| OC3 | Sovracorrente a velocità costante | 5 | Guasto del segnale di rilevamento (segnale FAULT) - Circuito gate |
| 11 | Guasto del segnale di rilevamento (segnale OCT) - Circuito di rilevamento (PPCB) | ||
| 12 | Guasto del segnale di rilevamento (segnale OCL) - Circuito di rilevamento (PPCB) | ||
| OV1 | Sovratensione durante l'accelerazione | 1 11 | Protezione da sovratensione (segnale OVT) Guasto del segnale di rilevamento (segnale OVT) |
| OV2 | Sovratensione durante la decelerazione | ||
| OV3 | Sovratensione durante la velocità costante | ||
| Lin | Perdita di fase in ingresso | 1 | Rilevamento del livello di protezione del diodo raddrizzatore |
| 2 | Rilevamento del livello di tolleranza in funzionamento continuo | ||
| OPL | Perdita di fase in uscita | 1 | |
| OH1 | Surriscaldamento dell'aletta di raffreddamento | 1 | Surriscaldamento dell'aletta di raffreddamento (NTC2) |
| 3 | Surriscaldamento del convertitore (NTC4) | ||
| 11 | Disconnessione del termistore (NTC2) | ||
| OH2 | Guasto esterno | 0 | Protezione attraverso il THR |
| OH3 | Surriscaldamento all'interno dell'inverter | 0 | Surriscaldamento dell'aria interna (NTC1) |
| OH4 | Protezione del motore (termistore PTC) | 1 | Termistore PTC |
| 2 | Termistore NTS | ||
| OH6 | Surriscaldamento della resistenza di carica | 1 | Surriscaldamento della resistenza di carica Tranne FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Disconnessione del termistore (NTC3) | ||
| OL1 | Sovraccarico del motore | 0 | Rilevamento della corrente elettronica termica |
| LV | Sottotensione | 1 | Si verifica una sottotensione durante l'attivazione del gate |
| 11 | Livello minimo di funzionamento della batteria | ||
| dbH | Surriscaldamento della resistenza DB | 0 | Surriscaldamento della resistenza DB (F50 <-> F52) |
| 1 | Transistor DB 2sec_ON continuamente (R sbagliato troppo alto) | ||
| dbA | Rilevamento dei guasti dei transistor DB | 0 | Rilevamento dei guasti dei transistor DB |
| Er1 | Errore di memoria | 0x0001 | Distruzione della storia degli allarmi |
| 0x0002 | Codice funzione standard | ||
| 0x0004 | Codice funzione utente | ||
| 0x0008 | Codice funzione nascosto | ||
| 0x0010 | Errore nell'area del programma | ||
| 0x0040 | Lettura errata (riprovare) | ||
| 0x0080 | Scrittura errata (riprovare) | ||
| 0x0100 | Area estesa | ||
| 0x1000 | Area dei valori di regolazione | ||
| Er2 | Errore di comunicazione del pannello della tastiera | 1 | Rilevamento della disconnessione |
| Er3 | Errore della CPU | 1 | La CPU riavvia l'elaborazione |
| 1000 | Errore di checksum del codice funzione (errore RAM) | ||
| 0x0001 | Errore del codice funzione standard | ||
| 0x0002 | Errore del codice funzione nascosto (codice u) | ||
| 0x0004 | Errore del codice funzione nascosto (codice n) | ||
| 0x0008 | Errore del codice funzione della valvola di regolazione | ||
| 0x0010 | Area estesa | ||
| 2000 | Errore di ciclo fisso | ||
| 0x0001 | Errore del ciclo L1 | ||
| 0x0004 | Errore del ciclo L3 | ||
| 0x0008 | Errore del ciclo L4 | ||
| 0x0020 | Errore del ciclo L6 | ||
| 0x0080 | Errore del ciclo LP | ||
| 3000 | Taglio ingiusto | ||
| 5001 | Ingresso RST esterno | ||
| 7001 | Distruzione dell'area della pila | ||
| 9000 | Rilevamento dei guasti del software | ||
| 0x0200 | Allarme QUE sopra | ||
| Er4 | Errore di comunicazione dell'opzione | 1 | Errore di comunicazione della porta A Non c'è un'opzione |
| 3 | Errore di comunicazione della porta C | ||
| 10 | Un eccesso di opzione installata Non c'è un'opzione |
||
| Er5 | Errore di opzione | 0 | Opzione in-match |
| 1 | Segnale di completamento ON (Non c'è opzione) | ||
| 10 | Errore EEPROM AIO PT (Non c'è opzione) | ||
| 26 | Errore di informazione sulla posizione PR-PP (solo OPC-PMPG+L01=2) | ||
| 27 | Errore di partenza delle informazioni sulla posizione PP | ||
| 50 | Nessuna area di salvataggio | ||
| 51 | Errore del comando di comunicazione | ||
| 52 | Errore del codice di distinzione | ||
| 53 | Errore di check-sum | ||
| 54 | Errore di scrittura | ||
| Er6 | Errore della procedura operativa | 2 | Inizio controllo |
| 7 | Errore assegnato a più velocità | ||
| 8 | Controllo dei freni (timeout di attesa) | ||
| 9 | |||
| 10 | Nessun tentativo di sintonizzazione della posizione dei poli magnetici | ||
| 11 | Errore di conferma del contattore lato uscita | ||
| 12 | Mancanza di velocità di valutazione | ||
| 14 | Chack del freno (errore assegnato) | ||
| 15 | Corto circuito (errore assegnato da SCC) | ||
| 16 | Errore di salvataggio |
| Codice | Nome dell'allarme | Sottocodice | Descrizione |
|---|---|---|---|
| Er7 | Alla messa a punto del motore a induzione | 1 | Errore assegnato a più velocità |
| 2 | Errore di fase R1 | ||
| 3 | Errore %X | ||
| 6 | Errore della corrente di uscita | ||
| 7 | Comando di azionamento OFF | ||
| 9 | BX morsetto ON | ||
| 11 | Rilevamento di sottotensione (LV) | ||
| 15 | L'allarme si verifica | ||
| 16 | Cambio del comando di azionamento | ||
| 19 | Altri | ||
| 21 | Errore I0 | ||
| 24 | IT morsetto | ||
| 25 | DRS morsetto | ||
| Er7 | Alla regolazione attuale del guadagno di rilevamento | 32 | Errore di scrittura della EEPROM |
| 37 | STOP tasto_ON | ||
| Er7 | Alla sintonizzazione dell'offset della posizione del polo magnetico | 51 | Messa a punto senza motore |
| 52 | Errore di risultato della sintonizzazione della posizione del polo magnetico | ||
| 53 | Mancanza di impostazione F42 | ||
| 54 | L04 non corrispondono | ||
| Er7 | Alla sintonizzazione dell'offset di rilevamento della corrente | 61 | Errore di scrittura della EEPROM |
| 62 | STOP tasto_ON | ||
| Er7 | Errore di sintonizzazione del motore sincrono | 5058 | Errore di resistenza amatura (limite inferiore) |
| 5059 | Errore di resistenza amatura (limite superiore) | ||
| 5060 | Errore Ld (limite inferiore) | ||
| 5061 | Errore Ld (limite superiore) | ||
| 5062 | Errore Lq (limite inferiore) | ||
| 5063 | Errore Lq (limite superiore) | ||
| 5080 | Errore di guadagno ACR (limite superiore) | ||
| 5081 | Errore di guadagno ACR (limite inferiore) | ||
| Er8 | Errore di comunicazione RS485 | 0 | CH1 Errore di comunicazione RS485 |
| nrb | Rilevamento della disconnessione del termistore NTC | 0 | Rilevamento della disconnessione del termistore NTC |
| OS | Velocità eccessiva | 0 | Protezione dalla sovravelocità |
| pg | Errore PG | 1 | Rilevamento della disconnessione da parte dell'hardware |
| 2 | Rilevamento della disconnessione della fase Z tramite software | ||
| 50 | Opzione - rilevamento disconnessione fase A/B (Sin) | ||
| 51 | Opzione - rilevamento disconnessione fase C/D (Sin) | ||
| 52 | Opzione - rilevamento disconnessione fase R (Sin) | ||
| 53 | Opzione - rilevamento disconnessione fase A/B (impulso) | ||
| 54 | Opzione - Rilevamento disconnessione fase Z (impulso) | ||
| 55 | Opzione - rilevamento disconnessione fase U/V/W (impulso) | ||
| 60 | Opzione - watchdog time out | ||
| 61 | Opzione - time-out risposta encoder seriale |
||
| 62 | Opzione - errore CRC di comunicazione della CPU | ||
| 63 | Opzione - errore di comunicazione della CPU | ||
| 70 | Opzione - errore di uscita ABZ | ||
| 71 | Opzione - encoder seriale ogni allarme | ||
| 72 | Opzione - errore di accesso alla memoria | ||
| 73 | Opzione - errore di coltura | ||
| 80 | Opzione - Errore di impostazione della scheda PG | ||
| ErE | Disadattamento della velocità (eccesso di deviazione di velocità) | 1 | I segni del comando della velocità e del rilevamento della velocità differiscono |
| 3 | Eccesso di deviazione della velocità (rilevamento della velocità > comando della velocità) | ||
| 5 | Il rilevamento della velocità continua ad essere 0 | ||
| 7 | Deviazione di velocità eccessiva (rilevamento della velocità < comando della velocità) | ||
| ErF | Errore di salvataggio dei dati sottotensione | 0 | Errore di salvataggio dei dati sottotensione |
| ErP | RS485 2ch errore di comunicazione | 0 | CH2 Errore di comunicazione RS485 |
| Ert | Errore di comunicazione CAN | 1 | Bus-off |
| 2 | Rilevamento del timeout della guardia | ||
| OLU | Sovraccarico dell'inverter | 1 | Protezione IGBT |
| 2 | Termico dell'inverter Solo FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | Errore del circuito IT | 10 | Errore di ingresso EN (_EN1A=L, EN2A=L) |
| 11 | Errore di ingresso EN (_EN1A=H, EN2A=H) | ||
| 5000 | Errore del circuito di diagnosi | ||
| 5010 | Guasto all'alimentazione del P5S | ||
| 5020 | Diagnosi della CPU: Diagnosi delle impostazioni della porta | ||
| 5030 | Diagnosi della CPU: Diagnosi della ROM | ||
| 5040 | Diagnosi della CPU: Diagnosi della RAM | ||
| 5050 | Diagnosi della CPU: monitor di sequenza | ||
| ECL | Malfunzionamento della logica di personalizzazione | 0 | Errore della logica di personalizzazione |
| Err | Fallimento simulato | 9998 | Fallimento simulato |
| Ot | Errore di coppia eccessivo | 0 | Errore di coppia eccessivo |
| bbE | Errore del freno meccanico | 11 | Errore del freno 1 |
| 12 | Errore del freno 2 | ||
| Eo | IT morsetto errore | 0 | IT morsetto errore |
| rbA | Errore di rilevamento della velocità di salvataggio | 0 | Errore di rilevamento della velocità di salvataggio |
| tCA | Arrivo del limite dell'interruttore di direzione | 0 | Arrivo del limite dell'interruttore di direzione |
| SCA | Errore di cortocircuito | 0 | Errore di cortocircuito |
| Lco | Errore della cella di carico | 0 | Errore della cella di carico |
| EF | Protezione del suolo | 0 | Corrente trifase Solo FRN0060LM2A-4 <-> FRN0091LM2A-4 |
Nei vecchi motori l'autotuning può fallire: in questi casi l'autotuning tipo 1 (al punto 10 selezionare P04 = 1) può essere eseguito ma in questo caso i valori P06 e P12 devono essere inseriti manualmente.

I valori tipici di P06 sono tra il 30% e il 70% di P03.
 F.r. = Frequenza nominale
F.r. = Frequenza nominaleS.s. = Velocità sincrona
S.r. = Velocità nominale
I valori accettabili di P12 sono compresi tra 0,5 e 5 Hz.
Per esempio, per un motore a 4 poli, la frequenza nominale è di 50 Hz, la velocità sincrona è di 1500 rpm e la velocità nominale è sulla targhetta del motore (sempre in giri al minuto).
Motore senza ingranaggi
In caso di problema "Error 52 = er7 Error VVVVF" apparirà nel MENU ERRORS. In questo caso controllare i collegamenti dell'encoder del motore, cancellare gli errori nel menu "Errori" e ripetere la procedura di poletuning dal punto 14.
Dopo la procedura di poletuning provate a muovere l'ascensore in manutenzione in su e in giù per alcuni giri del motore. Se si muove correttamente la procedura è finita, altrimenti, in caso di errore del VVVF (ere o Ocx o Os), invertire le due fasi del motore cambiando il parametro H190 del VVVF, cancellare gli errori nel menu "Fault" e ripetere la procedura di poletuning.
Istruzioni per l'aggiornamento del software
NomeFile.PP2 o .PP4
Inserite il dispositivo USB nello slot, aspettando il messaggio come nella Figura 1.
 (Figura 1)
(Figura 1)Selezionare "Put a file in PlayPad" (predefinito), premere il pulsante OK. La finestra cambia in Figura 2.
 (Figura 2)
(Figura 2)Seguire le istruzioni sullo schermo e selezionare il file .PP2/4 (nell'esempio PLP2_2.PP2) e premere OK. La finestra cambia in Figura 3
 (Figura 3)
(Figura 3)Premere OK per confermare il processo di aggiornamento. La finestra cambia in Figura 4
 (Figura 4)
(Figura 4)al fine della procedura dovete rimuovere l'USB (apparirà la Figura 5 o la Figura 6).
 (Figura 5)
(Figura 5) (Figura 6)
(Figura 6) (Figura 7)
(Figura 7)La finestra cambia in Figura 8.
 (Figura 8)
(Figura 8)Segui le istruzioni sullo schermo e seleziona il file *.bin e premi OK. La finestra cambia in Figura 9.
 (Figura 9)
(Figura 9)Premere OK per confermare il processo di aggiornamento. La finestra cambia in Figura 10, aspetta un po'.
 (Figura 10)
(Figura 10)Selezionare il dispositivo (o gruppo di dispositivi) da aggiornare e premere OK (Figura 11)
 (Figura 11)
(Figura 11)La finestra cambia in Figura 12: attendere il completamento del processo. Se è necessario, premere un pulsante freccia per accendere la retroilluminazione.
 (Figura 12)
(Figura 12)Quando il processo finisce (Figura 13) premete il tasto Esc fino a quando la finestra mostra "Please remove USB Device" (Figura 14).
 (Figura 13)
(Figura 13) (Figura 14)
(Figura 14)| Dispositivo | Tempo necessario per l'aggiornamento del SW |
|---|---|
| Scheda madre (Playboard quadro) | 3 minuti |
| PlayPad 4.0 | 1 minuto |
| Scheda TOC (Cabina Interfaccia TOP) | 1 minuto |
| Scheda DMCPIT (Cabina COP Interface) | 1 minuto |
| Interfacce per pulsanti seriali (dispositivi BDU) | 30 secondi |
| Schede di espansione (PIT8 / 16RL / 16IO) | 30 secondi |
(Tabella III.1 - Tempi di aggiornamento del SW)






