

Placa mãe
A placa de controlo do sistema Pitagora 4.0 baseia-se em tecnologia electrónica de 32 bits e opera todos os tipos de elevadores eléctricos e hidráulicos. Podem ser adicionadas ligações em série e/ou paralelas a painéis de botões de pressão (cabine e chão). É particularmente adequado para instalações eléctricas VVVF, também aquelas equipadas com o sistema de movimento sem controlo da cabina do elevador (Emenda A3 ou EN81-20 / 50).
- Até 28 andares com controlo em série e até 12 andares com controlo paralelo
- Linha série CAN Bus para ligar painéis de visualização e painéis de operação de aterragem em série
- Linha série CAN Bus para a comunicação da cabina do elevador em série
- APB; Down Collective, Full Collective
- Controlo de sistemas Multiplex (máx 6)
- Controlo de portas alternativas ou selectivas em sistemas de acesso através ou adjacentes
- Controlo de posição de elevação por contactos magnéticos, codificador de veio DMG incremental, motor - codificador ou ELGO LIMAX 33 CP Sistema de posicionamento absoluto
- Interface de programação/diagnóstico, a bordo e/ou à distância.
- Diagnóstico de estado, erros, falhas e estado de E/S
- Parâmetros VVVF e manipulação de diagnóstico (apenas FUJI FRENIC LIFT LM2)
- Controlo avançado de VVVF com controlo de velocidade, conforto e paragem precisa
- Actualização de software através de dispositivo USB
- Linha série RS232 para ligação a PC e modem GPRS
- Compatibilidade com todos os produtos DMG
- Compatibilidade com todas as soluções +A3 para sistemas eléctricos e hidráulicos
- Protecção de acesso ao veio (Acesso não autorizado ao Eixo)
A placa mãe 4.0 contém hardware e software que permite o controlo do elevador e de todos os seus periféricos. Através dos módulos de programação integrados e/ou remotos, permite o acesso a todas as funcionalidades disponíveis. As entradas e saídas são ligadas a todos os dispositivos electrónicos e electromecânicos no controlador e no elevador.
A placa mãe tem um módulo de programação amovível que permite a visualização e edição de todos os parâmetros básicos para a gestão e configuração do painel de controlo. Na versão VVVF, também os parâmetros FUJI da configuração básica (menu VVVF BASE) e avançada (menu VVVVF ADVANCED) podem ser visualizados e editados.
Para detalhes sobre o funcionamento do módulo de programação e um extenso menu do sistema de gestão, ver parágrafo que altera os parâmetros do sistema.
Módulo de programação remota
Uma forma alternativa de aceder ao menu de configuração do controlador, no modo de visualização/modificação, é ligando o teclado amovível da Placa de Reprodução DMG V3 (PlayPad), ao conector PLP V3, montado na Placa de Controlo do Elevador.
Este módulo pode ser ligado de várias maneiras:
- Ligado directamente
- Ligado por um cabo de extensão dedicado directamente no quadro (na casa das máquinas)
- Ligado à placa no tecto da cabina do elevador (TOC) no caso de elevadores com dispositivos de série pré-cablados DMG.
Uma forma alternativa de acesso ao controlador é baseada na Fusion App.

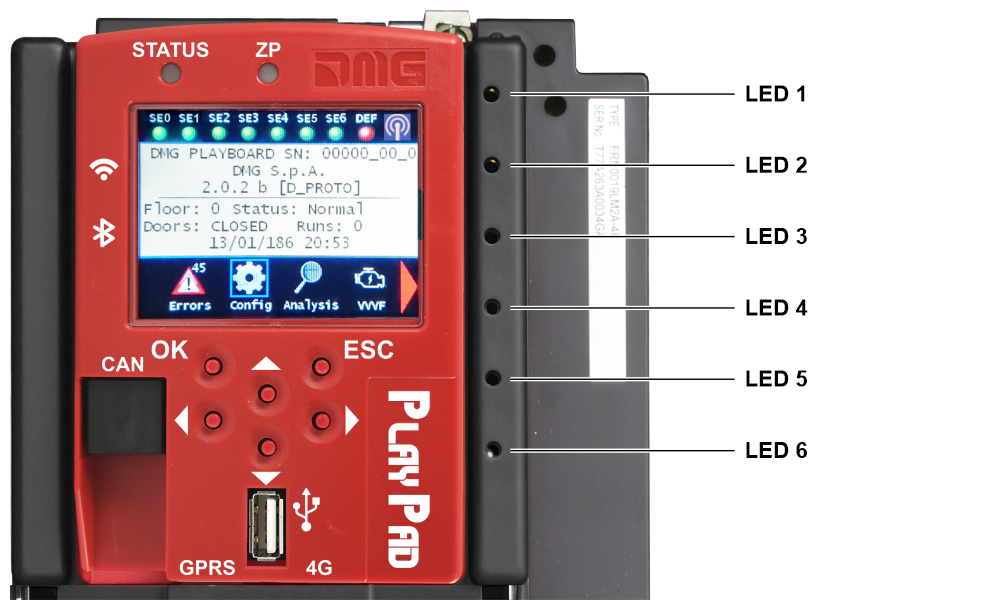
Na placa mãe estão presentes 6 leds para um diagnóstico fácil:
LED1 (Led verde)
Terminação Multiplex CAN activa: interruptor de led desligado quando a placa MULX está ligada (a terminação move-se automaticamente na placa MULX do primeiro e último controlador multiplex).
LED2 (Led verde)
Terminação da cabina CAN activa: interruptor de led desligado quando uma placa opcional (PIT8 / 16IO / 16RL) é ligada dentro do controlador (a terminação move-se automaticamente na última placa opcional).
LED3 (led RGB)
A cor deste led dá informações sobre o estado interno do elevador, de acordo com a tabela seguinte:
| Cor | Estado |
|---|---|
| Descolado | O sistema está a executar o procedimento de reset |
| Verde | O sistema está em modo de funcionamento normal |
| Amarelo | O sistema está em modo de inspecção |
| Rosa | O sistema está em modo de operações temporárias |
| Púrpura | O sistema está fora de serviço (estacionamento da cabina) |
| Ciano | O sistema está a funcionar em modo prioritário (LOP / CAR) |
| Vermelho | O sistema está a funcionar em modo de combate a incêndios |
| Branco | O sistema está a realizar o procedimento de emergência |
| Azul | O sistema está a realizar o procedimento de controlo da deriva da cabina do elevador |
LED4 (Leds amarelos)
O LED pisca quando o tabuleiro está a funcionar.
LED5 (Led verde)
A orientação dá o estatuto da cadeia de segurança SE5
LED6 (Led vermelho)
| Led Off | Nenhuma falha activa |
| Led Flashing | Uma (ou mais) falha activa |
| Liderado | Bloqueio de falha activo |

| Nome | Descrição | |
|---|---|---|
| FJ1 | Interface FUJI | Ligação à interface FUJI no interior do inversor. |
| J4 | FUJI Analógico / Serial | Ligação à FUJI utilizada em caso de Inversor remoto. |
| J6 | Sinais paralelos | Ligação à Direcção da APPO. Inclui todos os sinais paralelos disponíveis no bloco terminal no interior do painel de controlo. |
| J8 | Circuito UCM | Ligação ao circuito para a solução UCM. A Pitagora 4.0 tem soluções próprias certificadas para a gestão da solução UCM em instalações de elevadores. O sistema UCM é composto por três partes: - Detector que detecta um movimento involuntário de cabina. - Actuador como a acção de travagem é implementada - Dispositivo de paragem do que pára a cabina. O Dispositivo de Paragem deve ser um dispositivo de segurança certificado e é da responsabilidade do instalador assegurar a compatibilidade dos diferentes elementos do sistema UCM. Para a verificação funcional de todo o sistema e a medição dos espaços e tempos de intervenção, são previstos testes específicos a realizar no final da montagem (ver Teste e medições). Para mais informações sobre ligações e parâmetros ver a secção de circuitos da UCM). Uma lista não exaustiva dos tipos de sistemas e soluções UCM mais utilizados é apresentada na tabela seguinte, onde se destacam diferentes soluções aplicáveis, cada uma das quais com o seu próprio circuito dedicado de interface e programação. A interface com os dispositivos listados é efectuada de acordo com as especificações indicadas nos manuais dos fabricantes relevantes. Quando o sistema de posicionamento absoluto ELGO LIMAX 33CP é fornecido(link), é utilizada a sua função UCM certificada. Ver a tabela "Sistema UCM" abaixo |
| J9 | Circuito de Nivelamento | Circuito para fazer o Bypass de contacto de segurança de portas: - Pré-abertura e/ou - Re-nivelamento No caso do sistema de Posicionamento de Codificador Absoluto este conector não é utilizado. A gestão do circuito da operação de re-nivelamento consiste num Módulo de Segurança e num Relé de Segurança. Este circuito permite o by-pass dos contactos de segurança das portas, permitindo assim o movimento da cabina com as portas abertas a velocidade reduzida na área permitida (área de desbloqueio das portas) no caso de baixar o nível da cabina do elevador, de paragem não precisa da cabina do elevador, ou de pré-abertura das portas. A saída ISO fecha-se ao GND. - Saída ISO (portas de by-pass de contacto de relé de segurança) colector aberto máx. 24V 100mA - Entrada CCISO (Monitorizar relé de segurança ISO) fecho para GND (NC) I = 5mA - Entrada TISO (Monitor Safty module) fechamento para GND (NC) I = 5mA - S11-S12 (contacto livre) fecha quando a ISO1 é fechada O Segundo sinal de activação para o módulo Segurança vem directamente de um segundo sensor (ISO2) e deve aproximar-se do GND. |
| J10 | Light Curtain / >|< | Utilizar apenas em configuração completamente paralela. Ligação ao terminal de parafuso do armário. |
| J11 | Cadeia de Segurança | Ligação à Direcção do SECU. Inclui a leitura dos 7 pontos da cadeia de segurança. O sistema é baseado num circuito opto isolado ligado à terra (Dentro da placa SEC): - Entrada SE0 <-> SE6 opto-isolado 48 Vdc Acima do circuito de segurança, deve ser fornecido um disjuntor magnético de tamanho adequado (Imax = 0,5 A). - SE0 é o ponto de início da cadeia de Segurança (após Protecção DIS dentro do controlador) - A SE1 controla a zona SHAFT STOP e a caixa de inspecção PIT - SE2 controla o topo da cabina do elevador STOP e caixa de inspecção TOC - SE3 controla Interruptores de Limite, Equipamento de Segurança, Governador de Velocidade Excedida - O SE4 controla os BLOCOS PRELIMINARES DE PISO - SE5 controla os BLOCOS DO PISO - O SE6 controla as PORTAS DE AUTOMÓVEIS e os sistemas de contacto do Pré-Acionamento Se o interruptor de fim de curso, ou o regulador de velocidade excessiva ou o dispositivo de segurança for activado (o ponto de corrente de segurança SE3 abre), o sistema é colocado fora de serviço. Para voltar a colocá-lo em serviço, é necessário repor o erro SE3 através do módulo de programação. Obviamente, o contacto de segurança do interruptor de fim de curso final de excesso de velocidade tem de ser primeiro reiniciado. |
| J12 | Multiplex CAN | Ligação à placa MULX. Inclui a linha CAN para instalações Multiplex. Para mais informações sobre ligações e parâmetros, ver ANEXO I. |
| J13 | Carro no chão | Saída de sinal do sensor de zona da porta para sinal luminoso no armário. |
| J14 | Hydro Command | Ligação à placa COIL. Inclui os comandos de movimentação para instalações hidroeléctricas. Pode também ser utilizado no caso de instalações de Inversor Remoto. |
| J15 | Circuito EN81-21 | Ligação ao Circuito para gerir a Protecção em caso de Instalação com Espaço Reduzido no PIT. Inclui a gestão do circuito biestável nas portas e dispositivos de Protecção (sistema pré-accionado ou Protecção Manual no Fosso). Para mais informações sobre ligações e parâmetros ver ANEXO IX. |
| J16 | Posição do codificador | Sistema de posicionamento baseado num codificador incremental: - codificador de eixo DMG ou - Codificador de motor (apenas para VVVF Gearless Motor Lift) No caso do sistema de Posicionamento de Codificador Absoluto este conector não é utilizado. |
| J18 | Temperatura ambiente | Ligação ao Sensor de Temperatura Ambiental. Para utilizar a função de Controlo de Temperatura Ambiental o módulo sensor de temperatura DMG (Cod. Q40.SND). Esta função pára o sistema quando a temperatura da casa das máquinas desce abaixo do mínimo ou aumenta acima do limite máximo estabelecido. |
| J19 | Painel PME | Ligação ao Painel de Controlo no interior do armário. |
| J20 | Saída Sobressalente | Saída genérica utilizada para funções especiais. |
| J21 | Circuito de Emergência | Circuito para uma emergência completa ou evacuação com abertura do travão. |
| J22 | Relé Motor | Ligação ao relé para Contactores de Motor (ou activar sinais em caso de instalação de Contactores sem Contactores). Inclui também a entrada do monitor dos Contactores Principais. |
| J23 | Relé de Travagem | Ligação ao relé para Contactores de Travagem (ou válvulas em caso de instalação hidroeléctrica). Inclui também a entrada do monitor de Contactores de Travagem. |
| J25 | Teste de baterias | Ligação ao CHAR Board. Inclui os sinais para: - Baterias baixas - Sequência de fases (apenas Hydro) - Modo Backup |
| J26 | Quadros opcionais | Quadro facultativo de DMG para: - Botões de pressão paralelos pré-cablados (PIT8) - 16 relés de saída Board (16RL): A placa de expansão é necessária em particular para conduzir displays paralelos (1 Fio / Piso, 1 Fio / Segmento, Código Cinza, binário) como as saídas directas disponíveis - 16 Placa de entrada/saída (16IO) |
| M1 | Fornecimento de energia | Fornecimento de energia de um fornecedor comercial estabilizado de energia. O terminal negativo dos circuitos de energia e o carregador de bateria devem ser ligados à terra. Fornecimento de energia do relógio interno: Super Capacitor (autonomia de 5 dias sem fonte de alimentação). |
| Sistema UCM | |||
|---|---|---|---|
| Tipo de sistema | Detector | Actuador | Dispositivo de paragem |
| Elevador eléctrico. Sem manobras com as portas abertas. | Não é necessário. (apenas monitor dos travões) | ||
| Elevador eléctrico. Manobras com as portas abertas. | Pitagora 4.0 | Interrupção dos controlos de travagem (corrente de segurança aberta) | Travões (*) |
| Elevador eléctrico. Manobras com portas abertas com ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupção dos controlos de travagem (corrente de segurança aberta) | Travões (*) |
| Elevador eléctrico. Over Speed Governor com dispositivo anti-derrapante (**) | Pitagora 4.0 | Interrupção de energia do pino. | Equipamento de segurança |
| Elevador eléctrico. Over Speed Governor com dispositivo anti derrapagem (**) com ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupção de energia do pino. | Equipamento de segurança |
| Elevador hidráulico com válvula de dupla descida | Pitagora 4.0 | Interrupção dos controlos de travagem (corrente de segurança aberta) | Válvulas (***) |
| Elevador hidráulico com válvula de descida dupla com ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupção dos controlos de travagem (corrente de segurança aberta) | Válvulas (***) |
| Elevador hidráulico com gestão electrónica de válvulas (unidade de controlo certificada) | Pitagora 4.0 | Interrupção dos controlos de travagem (corrente de segurança aberta) | Válvulas (***) |
| Elevador hidráulico com gestão electrónica de válvulas (unidade de controlo certificada) com ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interrupção dos controlos de travagem (corrente de segurança aberta) | Válvulas (***) |
(*) solução aplicável exclusivamente para travões duplos certificados como elemento de paragem UCM de acordo com EN81-20 5.6.7.3 e 5.6.7.4 (motores Gearless ou motores com caixa de velocidades e travão de veio lento).
(**) Limitadores certificados pela UCM com pino anti-derrapante (por exemplo Montanari RQxxx-A, PFB LKxxx com bobina LSP, ou dispositivos semelhantes).
(***) Válvulas em série certificadas como elemento de paragem UCM de acordo com EN81-20 5.6.7.3 e 5.6.7.4
Menu de programação e alteração dos parâmetros do sistema
V3 Mapa do menu do ecrã
| PLACA DE CONTROLO DO ELEVADOR DMG S.p.A. | Língua? Francês, Inglês, Português, Italiano, Russo, Alemão, Holandês ENTER: confirmar / ESC: sair |
|
| ▲ ▼ | ▲ | |
| Código? ** Palavra-passe ** | ----- ENTRAR ----> | Estado do sistema |
| ▲ ▼ | ||
| Falhas | ||
| ▲ ▼ | ||
| Estado de E/S | ||
| ▲ ▼ | ||
| Configuração | ||
| ▲ ▼ | ||
| Portas | ||
| ▲ ▼ | ||
| Sinais | ||
| ▲ ▼ | ||
| Funções especiais | ||
| ▲ ▼ | ||
| Posicionamento | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Parâmetros Rec. | ||
| ▲ ▼ | ||
| Relógio |
"Menu "Estado do Sistema
O acesso é fácil a partir da janela principal do PlayPad, premindo uma vez a tecla ENTER.
| Estado do sistema | Descrição | Visualização em Apresentação em série |
|---|---|---|
| Reinicialização | O sistema está a executar o procedimento de reset | O - |
| Em serviço | O sistema está em modo de funcionamento normal | |
| Inspecção | O sistema está em modo de inspecção | OU |
| Temp. Operat | O sistema está em modo de operações temporárias | P |
| Fora de serviço | O sistema está fora de serviço | |
| Prioridade do automóvel | O sistema funciona no modo de prioridade da cabina do elevador (interruptor de chave de prioridade activado) | |
| Bombeiros | O sistema funciona em modo de combate a incêndios (várias operações) | |
| Emergência | O sistema está a realizar o procedimento de emergência | E |
| Controlo de derivação | O sistema está a realizar o procedimento de controlo da deriva da cabina do elevador | |
| Operação para cima | O sistema está a funcionar em ascensão | |
| Operação de descida | O sistema está a funcionar para baixo | |
| Re-nivelamento | A cabina do elevador está ao nível do chão e está a voltar a nivelar | |
| Ainda no chão | A cabina do elevador está ao nível do chão, sem chamadas registadas | |
| Alta velocidade | O sistema está a funcionar em modo de alta velocidade | |
| Baixa velocidade | O sistema está a funcionar em modo de baixa velocidade | |
| Fechar porta | A porta está completamente fechada | |
| Porta aberta | A porta é aberta (ou abertura/fechamento) | |
| Carga completa do carro | A cabina do elevador foi totalmente carregada | |
| Fotocélula A | A entrada relevante para a fotocélula A está activa | |
| Fotocélula B | A entrada relevante para a fotocélula B está activa | |
| Botão BRA | A entrada relevante para o botão de porta aberta da entrada A está activa | |
| Botão BRB | A entrada relevante para o botão de porta aberta da entrada B está activa |
"Menu "Falhas
Este Menu lista as últimas 60 falhas armazenadas na memória interna do controlador. Todas as falhas são descritas na secção Resolução de Problemas.
AVISO: Em caso de black out, a memória interna só é guardada se a bateria estiver ligada.
| Piso 0 12:30:56 < Falhas > | ----- ENTRAR ----> | Piso 0 < Falhas > Sem falhas | ||
| ----- ENTRAR ----> | Piso 0 < Falhas > Falhas: 4 Mostrar ? | ----- ENTRAR ----> | < Falhas > 3/4 43 = Inspecção Pos..: 0 # 1 Bacalhau. 0 17/03/09 10:10 * (ver abaixo para mais pormenores) |
|
| ▲ ▼ | ||||
| Repor todas as falhas registadas (prima ENTER para confirmar) NOTA: as avarias são eliminadas quando a cabina do elevador pára | Piso 0 < Falhas > Falhas: 4 Reinicialização ? | |||
| ▲ ▼ | ||||
| Limpar o erro detectado no interruptor de limite (prima ENTER para confirmar) NOTA: o cancelamento efectivo ocorre apenas no sistema de memória está parado | Piso 0 < Falhas > Falhas: 4 Repor XXX? (ver quadro abaixo) | |||
| Falha | Descrição |
|---|---|
| Reiniciar SE3 | Falha no interruptor de fim de curso; só pode ser eliminada após o fecho da cadeia de segurança. |
| Reinicialização 82212 | Controlo de derivação |
| RSP de reinicialização | Falha do RSP; para redução do fosso e da altura livre. |
| Reiniciar UCM | Falha UCM; para alteração A3 |
| Repor ISO | Falha ISO; detecção de problemas na operação de monitorização do módulo de segurança para abertura / re-nivelamento avançado de portas. |
| Reiniciar SCS | Falha SCS; instalação 81-20. |
| Reinicializar UAS | Falha UAS; Função especial. |
Menu "Estado de E/S".
 | ----->>>>> |  | ----->>>>> | Piso 0 - 12:30:56 < Estado de E/S > |
| Campo | Descrição | Navegação | Valores (grupo de 12) | ||||
|---|---|---|---|---|---|---|---|
| Chamada de carro | Simulação de uma chamada de carro do elevador | ▲▼ (Seleccionar andar) ENTER (Confirmar) ESC (Saída) | |||||
 Playboard IN-OUT | Entradas/saídas do sistema □ = Contacto Aberto ■ = Contacto Fechado | ▲▼ (Alterar grupo) ENTER (Sair) ESC (Saída) | GROUPS | ||||
| 1/9 | REM VHS SUR | VERMELHO TH1 COM | REV TH2 LE | REV1 REV2 LTMP |
|||
| 2/9 | RMO BRK RDE | RGV RMV RPV | MTR YBRK CCF | CCO CCOB |
|||
| 3/9 | BRA FOA ROA | CEA FFA RFA | BRB FOB ROB | CEB FFB RFB |
|||
| 4/9 | HS BFR OTM | PCA | POM RPH J20 | CPOM IEME OEME |
|||
| 5/9 | FLM FLD | BIP GNGM GNGD | 511B 511L | DSA 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | FAI ZP | FAS TISO | CAM ISO | AGH AGB CISO |
|||
| 8/9 | REM REM1 REM2 | VERMELHO VERMELHO1 RED2 | PME OVS | REV REV1 REV2 |
|||
| 9/9 | L-RED L-GREEN BUZZER | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF IN-OUT | Entradas/saídas VVVF □ = Contacto Aberto ■ = Contacto Fechado | ▲▼ (Alterar grupo) ENTER (Sair) ESC (Saída) | GROUPS | ||||
| 1/8 | EN FWD REV | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 RST | Y3 30 A/B/C | Y4 | |||
| 3/8 | NEGÓCIO ACC DEC | ALM INT BRK | EXT NUV RL | TL VL IL |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST --- | Fref = 0,00 Hz TRQ --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Codificador 0 P/s --- kW PRINCIPAL = |
||||||
| 7/8 | Falha VVVF 0 = --- 2 = --- | Falha VVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 Botões de pressão | Estado dos botões de chamada □ = Botão não activado ■ = Botão activado | ▲▼ (Alterar grupo) ◄► (Cab/down/up) ENTER (Sair) ESC (Saída) | GROUPS | ||||
| Lado da cabina A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Lado da cabina B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Botão de pressão lado de baixo A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Botão de pressão lado B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Para cima lado A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Para cima lado B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Cartões AUX | Entradas/saídas AUX de cartões □ = Contacto aberto ■ = Contacto fechado | ▲▼ (Mudar de página) ENTER (Sair) ESC (Sair) | CARTÕES 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| CARTÕES 16 IO OUT | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| CARTÕES 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| Entradas BDU | Entradas BDU □ = Contacto aberto ■ = Contacto fechado | ▲▼ (Alterar página) ◄► (Mudar de grupo) ENTER (Sair) ESC (Sair) | Grupo: Porta, Incêndio, Chave 1, Chave 2, Chave 3, Chave 4. Para cada grupo, o estado do contacto é apresentado para cada plano. |
||||
 Lista de registo de chamadas | Lista de registo de chamadas □ = Chamada não registada ■ = Chamada registada | ▲▼ (Alterar grupo) ◄► (Cab/down/up) ENTER (Sair) ESC (Saída) | Os mesmos grupos que os PUSHBUTTONS | ||||
| [0] Início = ... [1] Início = ... [2] Início = ... | Contadores de corrida [0] parcial (reinicializável) [1] Total [2] Utilização futura | ◄► (Alterar) ENTER (Reiniciar e Sair) ESC (Saída) | A data apresentada é referida ao último reset do contador parcial [0]. | ||||
| Análoga | Medidas analógicas | ▲▼ (Alterar página) ESC (Saída) | 24 V = Fonte de alimentação VCAB = Absorções de Gabinete e Cabine VMR = absorções de BDU 24VB = Voltagem das baterias +5,0 V = Alimentação interna de energia da placa TAMB = Sensor de temperatura ambiente PWM = Saída de velocidade analógica |
||||
| Medidas COT | Medidas analógicas | ▲▼ (Alterar página) ESC (Saída) | T_SHA = Temperatura do eixo PRINCIPAL = TOC Fonte de alimentação COP_A = COP side A absorções COP_B = absorções COP lado B |
||||
| Medidas COP | Medidas analógicas | ▲▼ (Alterar página) ESC (Saída) | MAIN_A = COP A fonte de alimentação MAIN_B = fonte de alimentação COP B T_CAR = Temperatura da cabina |
||||
| Linha FLOORS | BDU Linha de comunicação | ENTRAR (Reiniciar) ESC (Saída) | Erro: Número do erro de comunicação FER: Taxa de erro da moldura Data e hora da última reposição |
||||
| Linha CAR | COT / COP Linha de comunicação | ENTRAR (Reiniciar) ESC (Saída) | Erro: Número do erro de comunicação FER: Taxa de erro da moldura Data e hora da última reposição |
||||
| Linha MTPX | MULTIPLEX Linha de comunicação | ▲▼ (Alterar página) ENTRAR (Reiniciar) ESC (Saída) | Erro: Número do erro de comunicação FER: Taxa de erro da moldura Data e hora da última reposição |
||||
| Modelo ELGO: | Diagnóstico do ELGO | ||||||
Parâmetros de descrição da tabela PLAYBOARD IN-OUT
| Entrada | Descrição |
|---|---|
| SE0 | Início da cadeia de segurança |
| SE1 | Contactos de segurança da cadeia de segurança |
| SE2 | Cadeia de segurança no topo da caixa de inspecção da cabina do elevador/Paragem |
| SE3 | Interruptor de fim de curso da cadeia de segurança, equipamento de segurança, regulador de velocidade |
| SE4 | Contactos preliminares das portas da cadeia de segurança |
| SE5 | Bloqueios de segurança de portas de hall de segurança |
| SE6 | Contactos das portas dos elevadores de corrente de segurança e dispositivo de pré-arranque (81-21) |
| CCO CCOB | controlo de contactores de potência |
| CISO | Monitorizar relé ISO |
| TISO | Módulo de segurança controlo SM1 |
| LE | Luz de emergência (fonte de alimentação da luz da cabina do elevador) |
| BFR | botão de fecho de porta |
| PCA | Função de prioridade da cabina do elevador |
| POM | Operações de combate a incêndios (interruptor de chave de Hall) |
| CPOM | Operações de combate a incêndios (Interruptor de chave automóvel) |
| SUR | Controlo de sobrecarga |
| COM | Controlo total da carga |
| HS | função fora de serviço |
| ZP | sinal de zona de porta |
| RPH | Controlo da sequência de fases |
| REV REV1 REV2 | Função de inspecção (sala de máquinas) Função de inspecção (Top of Car) Função de inspecção (PIT) |
| REM REM1 REM2 | Inspecção acima (sala de máquinas) Inspecção para cima (Topo do carro) Inspecção (PIT) |
| VERMELHO VERMELHO1 RED2 | Inspecção em baixo (sala de máquinas) Inspecção em baixo (parte superior do carro) Inspecção em baixo (PIT) |
| TH1 TH2 | Controlo do sensor de temperatura do motor (óleo) |
| IEME | Emergência (falha no fornecimento de energia) |
| PME | Seleccionador de PME (evacuação de emergência) |
| AGH AGB | Interruptor de desaceleração superior Interruptor de desaceleração do fundo |
| FAS FAI | Sensores de posição (sem sistema de posicionamento do codificador) |
| E511 | Entrada opcional para Acesso ao Eixo |
| BYPL BYPC | Selector de Bypass de segurança da porta |
| BRA | Botão de abertura de porta (entrada A) |
| CEA | Entrada da fotocélula A |
| FOA | Interruptor de fim de curso de porta aberta entrada A |
| FFA | Interruptor de fim de curso de porta de entrada A |
| BRB | Botão de abertura de porta (entrada B) |
| CEB | Entrada da fotocélula B |
| FOB | Interruptor de fim de curso de porta aberta entrada B |
| FFB | Corsa chiusura fina (Porta B) |
| BR1 | Interruptor do monitor Brake 1 |
| BR2 | Interruptor do monitor Brake 2 |
| IN_A IN_D | Monitorizar o circuito UCM |
| Saída | Descrição |
|---|---|
| VHS | Saída - iluminação fora de serviço |
| RMV | Saída - comando de velocidade intermédia |
| BRK | Saída - Comando de travagem |
| MTR | Saída - Comando motor |
| YBRK | Saída - Comando de travagem (VVVF) |
| ISO | Saída - comando de re-nivelamento |
| RGV | Saída - comando de alta velocidade |
| RPV | Saída - comando de baixa velocidade |
| RMO | Comando de saída - up travel |
| RDE | Saída - comando de viagem para baixo |
| LTMP | Saída - comando de luz de elevador de tempo limitado |
| CAM | Saída - comando de rampa de retirada |
| OEM | Saída - comando de emergência |
| CCF | Saída - curto-circuito da fase motorizada |
| J20 | Saída - programável (conector J20) |
| DSA | Saída - desactivação dos alarmes |
| 511B | Saída - Norma 511 Buzzer |
| 511L | Saída - Norma 511 Luz |
| 212B | Saída - Norma 212 Buzzer |
| FLD | Saída - comando de setas para baixo |
| FLM | Saída - comando de setas para cima |
| GNGD | Saída - comando gongo ascendente |
| GNGM | Saída - comando gongo para baixo |
| BIP | Saída - Sinalização BIP na cabina |
| PWR | Comando de potência do módulo UCM |
| ENAB | UCM módulo que permite o comando |
| ROA | Saída - comando de porta aberta (entrada A) |
| RFA | Saída - comando de fecho de porta (entrada A) |
| ROB | Saída - comando de porta aberta (entrada B) |
| RFB | Saída - comando de fecho de porta (entrada B) |
| L-RED | Sinal de semáforo 81-20/21 |
| L-GREEN | Sinal de semáforo 81-20/21 |
| BUZZER | Sinal sonoro para o desvio 81-20 |
VVVF IN-OUT parâmetros de descrição da tabela
| Sinal | Descrição |
|---|---|
| EN | Activar a entrada digital (terminal de parafuso PT) |
| FWD | Entrada digital ascendente (terminal de parafuso FWD) |
| REV | Entrada digital descendente (terminal de parafuso REV) |
| X1 | Entrada digital de alta velocidade (terminal de parafuso X1) |
| X2 | Entrada digital de velocidade REV (terminal de parafuso X2) |
| X3 | Entrada digital de baixa velocidade (terminal de parafuso X3) |
| X4 | Ingresso digitale (morsetto X4) |
| X5 | entrada digital (terminal de parafuso X4) |
| X6 | Ingresso digitale (morsetto X6) |
| X7 | Ingresso digitale (morsetto X7) |
| X8 | Entrada digital de emergência (terminal de parafuso X8) |
| 0,0 V | Entrada analógica VVVF (terminais 11-12) |
| Codificador | Codificador de entrada VVVF (circuito fechado) |
| PRINCIPAL | Versão de firmware VVVF |
| Y1 | Saída digital (terminal Y1) |
| Y2 | Saída digital (terminal Y2) |
| Y3 | Saída digital (terminal Y3) |
| Y4 | Saída digital (terminal Y4) |
| Y5A/C | Relés de comando de travagem (terminal Y5) |
| 30 A/B/C | Relè (terminal 30 A/B/C) |
| ALM | Alarme VVVF signalisation |
| RST | Reiniciar VVVF |
| ACC | Aceleração |
| DEC | Desaceleração |
| Fout | Frequência de saída |
| Vout | Tensão de saída |
| Iout | Corrente de saída |
| Imax | Corrente máxima de saída |
"Menu "Configuração
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Configuração > |
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Operações temporárias | Modo de operações temporárias do sistema | ◄► (Escolha) | Não; Sim | Não |
| Teste | Para facilitar as verificações e o arranque da instalação. Para descrição, consultar o Anexo II. | |||
| Código ? | Protecção por palavra-passe para aceder à programação | ◄► (Alterar caracteres) ▲▼ (Seleccionar caracteres) | 8 caracteres (0 - 9; A - Z; a - z ) | sem palavra-passe |
| Configuração | Tipo de configuração de cablagem: -) Terminais de arame padrão (Carro e pisos); -) Comunicações em série na cabina do elevador, 1 linha/chão de ligação no chão; -) Terminais de fios na cabina do elevador, comunicação em série nos pisos (módulos BDU); -) Comunicação em série para a cabina do elevador e pisos | ◄► (Escolha) | Carro & Fl. STD; Car SER. / Fl. RJ45; Automóvel STD. / Fl. BDU; Car SER. / Fl. BDU | Car SER / Fl. RJ45 |
| Tipo de controlo | Tipo de controlo para o elevador | ◄► (Escolha) | -SAPB; -SAPB recorde -SAPB pressão constante -Baixo colectivo; -Cololectivo Completo; | SAPB; |
| Conduzir | Tipo de tracção: -) Tração VVVF -) Hidráulica - Motor Direct (Dir): Também pode ser utilizado em caso de VVF activado apenas na direcção UP. -) Hidráulico - Motor de Arranque Suave (S-S): -) Hidráulica - Motor Star Delta (Y-D): -) Hidráulico - Motor com Inversor (VVF): Contactores de motor activados na direcção UP e DOWN. | ◄► (Escolha) | Tracção Dir Hidráulico Hidráulica S-S Hidráulica Y-D VVF Hidráulica | Tracção |
| Nº de pisos | Número de pisos da instalação | ▲▼ (Aumentar/Diminuir) | 2 <-> 16 (std.) 2 <-> 32 (apenas BDU) | 2 |
| Re-nivelamento | Não presente: Sem re-nivelamento Tipo 1: (abrir ou fechar porta). Esta configuração é indicada para instalações de tracção para uma boa precisão de paragem. O re-nivelamento é accionado quando a cabina do elevador deixa a sua posição "perfeitamente no chão", ou seja, quando uma das duas vigas é interrompida. O re-nivelamento termina quando ambas as vigas estão livres. AVISO: este ajuste não é adequado para instalações hidráulicas devido ao risco de efeito "bombeamento" (a cabina do elevador desce após a paragem) Tipo 2: (abrir ou fechar a porta). Esta configuração é indicada para instalações hidráulicas e funciona como no Tipo 1, excepto que as duas vigas devem ser interrompidas antes de se iniciar o novo nivelamento. O re-nivelamento termina quando as duas vigas estão livres. AVISO: sugere-se a utilização de sensores com distância reduzida entre feixes (TMS03 = 20 mm). Tipo 3: Nivelamento de 1 feixe porta aberta 2 feixes porta fechada. Este ajuste permite o nivelamento de 1 viga, porta de chão aberta (luz da cabina do elevador ligada) e nivelamento de 2 vigas, porta de chão fechada (luz da cabina do elevador desligada). AVISO: para accionar a porta de nivelamento aberta, independentemente da opção escolhida, é necessário desviar a segurança da porta, utilizando um sistema aprovado. Nota: com o sistema de posicionamento do codificador, a distância de activação do re-nivelamento é exibida | ◄► (Escolha) | Não presente Tipo 1 Tipo 2 Tipo 3 | Não presente |
| Piso principal | Posição do piso principal (todas as chamadas abaixo deste piso são servidas apenas para cima (apenas colectivamente para baixo) | ▲▼ (Aumentar/Diminuir) | 0 <-> Piso nº. | 0 |
| Tempo de falha de baixa velocidade | Tempo antes da activação da falha de baixa velocidade (velocidade baixa demasiado longa) | ▲▼ (Aumentar/Diminuir) | 7 s <-> 40 s | 7 s |
| Tempo de funcionamento | Tempo antes da activação da falha de tempo de funcionamento | ▲▼ (Aumentar/Diminuir) | 20 s <-> 45 s | 20 s |
| Tipo de instalação | Tipo de instalação (Simplex / Multiplex / Multiplex LIGHT) Multiplex LIGHT tem uma linha BDU única partilhada para dois elevadores com uma cablagem de sinalização dedicada. | ◄► (Escolha) | Simplex; Multiplex; Multiplex LUZ | Simplex |
| Configuração Multiplex | Configuração Multiplex: N.º de Elevação (LN); Linha de Botões de pressão (PBL); Pisos em multiplex; Offset. Para descrição, consultar soluções Multiplex. | ◄► (Seleccionar parâmetro) ▲▼ (Alterar valor) | - Elevador nº (LN): 1<->4 - Linha PushButtons (PBL): 0(1 Linha)<->3(4 Linhas) | (LN).(PBL): 1.0 |
| - Pavimentos: 2 <-> 16 [32] - Ofst 0 <-> N° de pisos | Flrs. : 2 Ofst : 0 |
|||
| Multiplex Chamada | Em instalações multiplex, uma chamada de chão pode ser diferenciada com uma longa pressão de botão (mais de 3 segundos): a)A instalação com o parâmetro mais baixo "Lift No (LN)" (por exemplo, se houver uma instalação duplex com uma cabine grande para passageiros deficientes e uma menor, a maior deve ser definida como "1" e a outra como "2"; b)Num sistema de "distribuição assimétrica do piso", a instalação que pode atingir o nível mais baixo/mais alto. | ◄► (Escolha) | Não (0, 1, 2, 3) Sim (0, 1, 2, 3) | Não |
"Menu "Portas
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Portas > |
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Rampa de retorno em | Tempo antes da activação da rampa de reforma | ▲▼ (Aumentar/Diminuir) | 0,1 s <-> 9,9 s | 0,1 s |
| Rampa de retorno | Tempo antes da desactivação da rampa de retirada | ▲▼ (Aumentar/Diminuir) | 0,1 s <-> 9,9 s | 0,1 s |
| Tempo de falha de bloqueio | Tempo antes da activação da falha da fechadura | ▲▼ (Aumentar/Diminuir) | 2 s <-> 60 s | 15 s |
| Atraso de porta aberta | Tempo antes da abertura da porta - para porta automática | ▲▼ (Aumentar/Diminuir) | 0,1 s <-> 9,9 s | 0,5 s |
| Tempo de estacionamento com a porta aberta | Tempo de estacionamento do elevador com a porta aberta (em seg.) | ▲▼ (Aumentar/Diminuir) | 1 s <-> 30 s | 7 s |
| Hora de encerramento com chamadas | Tempo (em seg.) antes do fecho da porta em caso de chamadas registadas | ▲▼ (Aumentar/Diminuir) | 1 s <-> 60 s | 2 s |
| Portas Nb. | Número e tipo de portas | ◄► (Selecção) | -1 porta -2 portas simultâneas. -2 portas sel. -2 portas sel+through | 1 acesso |
| Tipo Porta A | Selecção do tipo de porta para entrada A: 1) Manual / Não presente: portas manuais no chão, portas de elevador manual ou não presente; 2) Independente da cabina: portas manuais nos pisos, portas de cabina de elevador independentes; 3) Automático automóvel: portas manuais nos pisos, portas de elevador automóvel automáticas; 4) Automóvel combinado: portas automáticas no piso da cabina do elevador e nos pisos | ◄► (Selecção) | Manual / não presente; Car Independent; Automóvel automático; Automóvel combinado | Automóvel Combinado |
| Porta A com interruptor de fim de curso | Presença de um interruptor limitador para a porta A (não presente para portas manuais e independentes) | ◄► (Selecção) | Não; Sim (NÃO) Sim (NC) | Não |
| Seleccionar a porta A no chão | Configuração da porta A para cada piso: definir o acesso a cada piso e abrir ou fechar o estacionamento da porta no piso (para portas automáticas) | ◄► (Selecção) ▲▼ (Mudar de andar) | Não; Pkg. Porta fechada; Pkg. Porta aberta | Pkg. Porta fechada; |
| Porta A Tempo de abertura/fechamento | Porta A sem interruptor de fim de curso: tempo de abertura/fecho da porta | ▲▼ (Aumentar/Diminuir) | 1 s <-> 60 s | 10 s |
| Porta Um atraso de arranque | Porta A manual: tempo antes do início | ▲▼ (Aumentar/Diminuir) | 0,1 s <-> 9,9 s | 2,0 s |
| Porta de Correr A | Porta A com interruptor de fim de curso: tempo antes de escorregar falha | ▲▼ (Aumentar/Diminuir) | 1 s <-> 60 s | 10 s |
| Porta A alimentada | Porta A alimentada durante a corrida. Não considerada para portas manuais ou independentes. | ◄► (Selecção) | Não Sim Sim AT40 | Não |
| Tipo Porta B | Selecção do tipo de porta para entrada B (ver Porta Tipo A): | ◄► (Selecção) | Manual / não presente; Car Independent; Automóvel automático; Automóvel combinado | Automóvel Combinado |
| Porta B com interruptor de fim de curso | Presença de um interruptor limitador para a porta A (não presente para portas manuais e independentes) | ◄► (Selecção) | Não; Sim | Não |
| Seleccionar a porta B no chão | Configuração da porta A para cada piso: definir o acesso a cada piso e abrir ou fechar o estacionamento da porta no piso (para portas automáticas) | ◄► (Selecção) ▲▼ (Mudar de andar) | Não; Pkg. Porta fechada; Pkg. Porta aberta | Pkg. Fechar porta |
| Porta B Tempo de abertura/fechamento | Porta B sem interruptor de fim de curso: tempo de abertura/fecho da porta | ▲▼ (Aumentar/Diminuir) | 1 s <-> 60 s | 10 s |
| Porta B atraso de arranque | Manual da porta B: tempo antes do início | ▲▼ (Aumentar/Diminuir) | 0,1 s <-> 9,9 s | 2,0 s |
| Porta de Correr B | Porta B com interruptor de fim de curso: tempo antes de falha de deslizamento | ▲▼ (Aumentar/Diminuir) | 1 s <-> 60 s | 10 s |
| Porta B alimentada | Porta B alimentada durante a corrida. Não considerado para portas manuais ou independentes. | ◄► (Selecção) | Não Sim Sim AT40 | Não |
| Abertura avançada | Parâmetro de abertura avançada da porta (abertura começa antes da paragem da cabina do elevador). | ◄► (Selecção) | Não; Sim | Não |
| Tipo de fotocélula | Parâmetro para seleccionar o tipo de fotocélula: SEM fotocélula: o contacto abre-se se o feixe estiver livre. O contacto fecha-se se o feixe for interrompido. Os contactos de choque, fotocélula e porta aberta devem ser ligados em paralelo. Fotocélula NC: em frente da fotocélula NO. O choque, a fotocélula e os contactos da porta aberta têm de ser ligados em série. NOTA: O choque, a fotocélula e os contactos da porta aberta devem ser todos do mesmo tipo (NA ou NF). | ◄► (Selecção) | NÃO; NC | Não |
| Tempo de contacto da porta | Tempo de espera antes de iniciar uma viagem (para o contacto de segurança da porta antiga) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,1 s |
"Menu "Sinais
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Sinais > |
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Prioridade do carro | Tempo da cabina do elevador no chão sem direcção antes de receber chamadas de aterragem. No caso de portas automáticas combinadas, o tempo começa quando as portas fecham e o choque, a fotocélula e os contactos de reabertura não são activados. | ▲▼ (Aumentar/Diminuir) | 2 s <-> 30 s | 10 s |
| Registo de chamadas ao solo | Definir os botões de pisca-pisca para o chão no momento do registo | ◄► (Selecção) | Permanente; Rufos nos pavimentos | Permanente |
| Saída AUX | Selecção do tipo de saída nos 16 quadros de relés. NOTA: 1 fio/piso e 1 fio/piso configurações HYD estão disponíveis apenas nas primeiras placas de 16RL. Após a configuração das duas placas AUX, as saídas podem ser definidas em BDU (OUT-1 e OUT-2). | ◄► (Selecção) ▲▼ (Alterar valor) | 1 fio por andar; Carro no chão; Luz no chão; Indicador cinzento; 9 segm. indicador; Elevador está a chegar; 1 fio por piso; HYD | 1 fio por andar |
| Entradas BDU Tipo 0 = Carro no chão e fora de serviço Tipo 1 = Setas Tipo 2 = Carro no chão e o carro está a chegar Tipo 3 = 3 Exposição de fio | Tipo 0 Tipo 1 Tipo 2 Tipo 3 | Tipo 0 | ||
| Designação automática do piso | Definição automática de caracteres numéricos para indicadores de posição em série. O valor aumenta/diminui automaticamente em cada andar a partir do andar mais baixo | ▲▼ (Aumentar/Diminuir) | -9 <-> 30 | Fl. mais baixo: 0 |
| Designação manual do piso | Definição manual de caracteres alfanuméricos para indicadores de posição em série. A definição deve ser feita para cada andar | ◄► (Selecção) ▲▼ (Alterar valor) | - ; 0 <-> 9 ; A <-> Z | |
| Disparo em PV | É possível iniciar o disparo (sintetizador de fala / setas de direcção seguinte) no ponto de desaceleração (Sim) ou à chegada ao solo (Não). | ◄► (Selecção) | Não sim | Não |
| Setas de direcção seguinte | Em caso de activação de parâmetros, as saídas de seta só são activadas quando o elevador pára no chão (ou ao abrandar se o parâmetro de activação do PV estiver activo). | ◄► (Escolha) | Não sim | Não |
| Atraso LTMP | Esta função trata do atraso entre uma chamada de carro de piso/elevador e o acender da luz. A saída é desactivada XX segundos após a chamada ter sido atendida. 0 seg significa sem temporizador activo (luz acesa) | ▲▼ (Aumentar/Diminuir) | 0 s <-> 240 s | 1 segundo. |
| Atraso EME | Esta função trata do atraso entre o sinal de black out (IEME) e o comando de saída (OEME) antes do interruptor do sistema em procedimento de emergência automático. | ▲▼ (Aumentar/Diminuir) | 0 s <-> 30 s | 0 seg. |
| Buzzer 81-21 | Para a instalação 81-21: utilizar a campainha acústica 81-20 (porta de derivação) no topo da cabina do elevador como alarme acústico quando as protecções não estão na posição activa. | ◄► (Escolha) | Não sim | Não |
"Menu "Características especiais
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Características especiais > |
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Reinicialização em | Direcção da viagem durante o procedimento de reinicialização | ◄► (Selecção) | 2 s <-> 30 s | 10 s |
| Limites de viagem na inspecção | Válido apenas para o sistema de posicionamento FAI/FAS. Definições para os limites de viagem durante o modo de inspecção. Se a viagem for programada para além dos limites, o controlador não permite qualquer movimento para além dos pisos superior/ inferior. | ◄► (Selecção) | Até AGB/AGH; Para além do AGB/AGH | Até AGB/AGH |
| Bombeiros | (Consulte o procedimento de programação da operação de Incêndio ) Tipo de operações de combate a incêndios (se presentes) e parâmetros relevantes (nível e lado de acesso ao serviço de incêndios, tipo de contacto chave POM e CPOM); escolha da norma aplicável relevante: -) Norma NF P82-207 (França); -) EN 81-72 (a): sem interruptor de chave da cabina do elevador FF; -) EN 81-72 (b): com interruptor de chave FF da cabina do elevador; | ◄► (Seleccionar campo) ▲▼ (Alterar valor) | Não presente; NF P82-207; EN 81-72 (a); EN 81-72 (b) EN 81-73 DM 15/09/2005 (IT) | Não presente |
| Detecção de incêndios | Parâmetro para a detecção de incêndios em pisos. Quando um incêndio é detectado: - se o elevador estiver num piso diferente daquele em que o fogo foi detectado, todas as chamadas registadas de/para este piso são canceladas; - se o elevador estiver no piso onde foi detectado um incêndio, o controlador bloqueia a abertura da porta, fecha as portas (se abertas após a detecção de incêndio) e envia a cabina do elevador para um piso seguro | ◄► (Selecção) | Não; Sim | Não |
| Botão de paragem de registo | O sistema regista o modo fora de serviço (pressão do botão STOP). Também é possível definir o atraso para evitar o movimento simultâneo em instalações alimentadas com um gerador. | ◄► (Selecção) | Não; Sim | Não |
| EN 81-20 | Definição do sistema de acordo com a norma EN 81-20 | ◄► (Selecção) | Não; Sim | Não |
| Falha anti-nuisance | Parâmetro para a detecção da falha de antinuidade (número de paragens sem activação de fotocélulas, após o que todas as chamadas de carro do elevador são canceladas) | ◄► (Selecção) ▲▼ (Sem chamadas) | Não; Sim 2 <-> 10 | Não 3 |
| Piso fora de serviço | Chão para fora de serviço. Piso de estacionamento quando a entrada HS está activada. | ▲▼ (Aumentar/Diminuir) | 0 <-> Piso nº..: | 0 |
| Retorno automático | Parâmetros para o retorno automático da cabina do elevador no chão: Tempo mínimo de espera antes do retorno automático | ◄► (Seleccionar parâmetro) ▲▼ (Alterar valor) | Não 0 <-> Piso nº..: 1 min <-> 60 min | Não 0 15 min. |
| Zonas de retorno | Configurações avançadas para devolução no piso em horas / dias planeados: -) Dia (0 = todos os dias, 1 = segunda-feira ... 7 = domingo); -) Intervalo de tempo seleccionado (4 intervalos por dia); -) Piso de retorno; -) Hora de início; -) Tempo final (tempo máximo: 7h 45 min); | ◄► (Seleccionar parâmetro) ▲▼ (Alterar valor) | ||
| Cronograma da zona R. | Calendário para zonas de regresso seleccionadas | ◄► (Selecção) ▲▼ (Alterar valor) | Não; Sim 1 s <-> 120 s | Não 60 s |
| Apagamento de chamadas no chão | Apagar todas as chamadas no piso onde a cabina do elevador pára, sem qualquer controlo da direcção (apenas para instalações colectivas completas) | ◄► (Selecção) | Não; Sim | Não |
| Controlo de derivação (FR) | Controlo de derivação (França) | ◄► (Selecção) | Não está presente; Acionamento de tração; Máquina de tambor | Nenhum |
| Código de botão de pressão | Permite-lhe programar um código de 4 dígitos para chamadas de carros de elevador. Um código de 4 dígitos pode ser atribuído a cada entrada de botão de elevador de cabina BCx, correspondente às entradas de botão de elevador de cabina. Exemplo: se o botão de pressão BC0 estiver associado ao código 0123, para reservar o piso 0 da Cabine, pode: a)manter premido o botão de pressão do piso 0 durante 3 segundos. b)Todos os botões de pressão COP irão piscar c)Prima em sequência os botões correspondentes aos BC0, BC1, BC2, BC3; Nota: Introduza um código entre 0 e 9 correspondente às entradas BC0 ÷ BC9 O código de programação "0" permitirá a função especial Pent House | ◄► (Seleccionar campo) ▲▼ (Alterar valor) | ||
| Controle Temperatura ambiente | Verificar a temperatura na casa das máquinas através do sensor (se presente). Se a temperatura ultrapassar os limiares definidos durante mais de 30 segundos, o sistema pára no chão e o erro é registado. O controlo só está activo durante o funcionamento normal ou prioridade da Cabine. Após ter definido os dois limiares, premindo Enter pode efectuar a calibração do sensor (premir imediatamente Enter para manter a calibração actual, caso contrário, definir o valor da temperatura ambiente e depois premir Enter). O primeiro limiar pode ser definido entre -10 ° C e +5 ° C enquanto o segundo limiar pode ser definido entre +40 ° C e +75 ° C. | ◄► (Seleccionar campo) ▲▼ (Alterar valor) | Without; +5°C <=> +40°C | Sem |
| Automático Chamadas | Quando o elevador está no modo normal, "Chamadas automáticas" podem ser activadas para efectuar um número de chamada específico (até 120 chamadas ou ilimitadas) em passos de um minuto. No entanto, é possível activar ou não a funcionalidade de portas (o sistema também continuará a aceitar chamadas de piso simulando chamadas programadas, se activadas). A função termina automaticamente quando as máquinas são desligadas ou se o sistema é colocado em modo de inspecção. | ▲▼ (Aumentar/Diminuir ◄► (Seleccionar portas) | 0 <-> 120 ∞ 10 <-> 60 s Sim - Não | 0 60s Sim |
| Monitor UCM | Emenda A3. Configurar o tipo de monitor. Para descrição, consulte o circuito UCM. | ▲▼ (Aumentar/Diminuir ◄► (Escolha) | ||
| UCM | Tipo de instalação 81-1 / 81-20 / 81-21 Procedimento de acesso ao eixo e Protecções. Para descrição, consulte o circuito UCM. | ▲▼ (Aumentar/Diminuir ◄► (Escolha) | ||
| Paragem forçada | Se programada, a instalação irá parar num andar específico em cada passagem (alguns hotéis utilizam esta função). | ▲▼ (Aumentar/Diminuir ◄► (Escolha) | ||
| Proteger o chão | Se for programado um piso protegido, quando a cabina do elevador chega ao piso, a porta não se abre, em vez disso o monitor mostrará imagens provenientes da câmara correspondente a esse piso. As portas só podem ser abertas premindo o botão OPEN DOOR; se isto não acontecer, o elevador desloca-se para o piso anterior e depois pára o modo de piso protegido (este modo de funcionamento só é possível com o sistema de monitorização da DMG). | ▲▼ (Aumentar/Diminuir ◄► (Escolha) | ||
| Prioridade Lop | Activação da função de chamada de prioridade de piso. emparelhamento com cartão de 16 IN (ou entradas chave da BDU) | ◄► (Escolha) | Não; Sim | Não |
| Ativar o piso | Activação da função de activação de chamadas (por exemplo, leitor de CARD). Em combinação com cartão de 16 IN. Tipo 1: LOP enable: para activar as chamadas, a entrada correspondente do cartão de 16 IN deve ser fechada. Tipo 2: activação COP Para activar chamadas, a entrada correspondente do cartão de 16 IN tem de ser fechada. Tipo 3: Habilitar COP + LOP: para habilitar chamadas, a entrada correspondente do cartão de 16 IN deve ser fechada (desabilitando o piso) | ▲▼ (Aumentar/Diminuir ◄► (Escolha) | Não Tipo 1 Tipo 2 Tipo 3 | Não |
| Protecção do Eixo | Protecção do compartimento e das portas. Para descrição, consultar Protecção dos veios. | ▲▼ (Aumentar/Diminuir | Não Tipo 1 Tipo 2 Tipo 3 Tipo 4 | Não |
| Pesagem de carga integrada | Habilitar a função de Pesagem de carga integrada. É obrigatório um procedimento de calibração(Teste 22) | ◄► (Seleccionar campo) | Não; Sim | Não |
"Menu "Posicionamento do Sistema
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Posicionamento > |
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Sistema de posicionamento | Tipo de sistema de posicionamento: com codificador ou tradicional. Só pode ser modificado em Operador Temporário. Modo Nota: em caso de Encoder absoluto e comprimentos de eixo superiores a 65 metros alterar a resolução do Encoder = 2 no menu de configuração automática antes de iniciar o procedimento de ensino manual. | ◄► (Selecção) | FAI/FAS; Codificador no sentido dos ponteiros do relógio; Codificador no sentido contrário ao dos ponteiros do relógio Codificador ELGO | FAI/FAS |
| PV de topo | Posição da desaceleração (passagem em baixa velocidade) e número de entradas | ▲▼ (Aumentar/Diminuir) | 2 <-> 6 | 5 |
| PV em pisos | Posição da desaceleração específica para cada andar | ◄► (Top PV) ▲▼ (Floor choice) | Piso curto ou 2<->6 0 <-> Não. Piso | 5 todos os pisos |
| Atraso de nível curto | Tempo antes da desaceleração do nível curto (apenas se for programado um nível curto) | ▲▼ (Aumentar/Diminuir) | 0,00 s <-> 2,50 s | 0,00s |
| Atraso PV 2 superior | Atraso antes da passagem para a velocidade intermédia | ▲▼ (Aumentar/Diminuir) | 0,00 s <-> 2,50 s | 0,00s |
| Atraso Dir.-BRK | VVVF: Atraso entre a activação da direcção de viagem e o comando de execução (BRK) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Outros |
| OLEO: atraso Estrela / Delta | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Estrela/Delta 0,0 s - Outros |
|
| Atraso BRK-S | Atraso entre a activação do comando BRK e o comando de velocidade | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,00 s |
| Atraso BRK-Dir. | Atraso entre a desactivação do comando run e a desactivação da direcção de viagem (chegar ao piano) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Outros |
| Velocidade de inspecção | Define a velocidade de viagem na inspecção | ◄► (Selecção) | Velocidade baixa; Velocidade elevada | Baixa velocidade |
| Emergência BRK On | Parâmetro de modulação de ruptura de emergência (modificar apenas se a placa EME não estiver presente) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 5,0 s | 0,0s |
| BRK de emergência desligado | Parâmetro de modulação de ruptura de emergência (modificar apenas se a placa EME não estiver presente) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 5,0 s | 0,0s |
Tabela de Parâmetros: (Sistema de posicionamento do codificador):
| Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|
| Sistema de posicionamento | Tipo de sistema de posicionamento: com codificador ou tradicional. Nota: Só pode ser modificado em modo de funcionamento temporário. | ◄► (Selecção) | Codificador no sentido horário; Codificador no sentido anti-horário Codificador ELGO | Codificador no sentido dos ponteiros do relógio |
| Autosetting | Início do procedimento de auto-aprendizagem da posição do piso. Só pode ser modificado em modo de Operação Temporária. | ◄► (Selecção) | Não; Sim | Não |
| Posição do piso | Valor da posição para cada andar | ▲▼ (Aumentar/Diminuir) ◄► (Selecção) | ||
| Accel. Hora | Tempo de aceleração. Tempo necessário para passar da velocidade de arranque para a velocidade de viagem. | ▲▼ (Aumentar/Diminuir) | 1,0 s <-> 5,0 s | 3,0 s |
| Impulso inicial | Velocidade inicial | ▲▼ (Aumentar/Diminuir) | 0 s <-> 10 s | 3 % |
| Impulso de Paragem | Velocidade final (paragem) | ▲▼ (Aumentar/Diminuir) | 0 s <-> 10 s | 4 % |
| Velocidade máxima | Velocidade máxima durante a viagem | ▲▼ (Aumentar/Diminuir) | 5 s <-> 100 s | 100 % |
| Velocidade de inspecção | Velocidade de viagem em modo de inspecção | ▲▼ (Aumentar/Diminuir) | 5 s <-> 100 s | 50 % |
| Velocidade AGB/AGH | Velocidade de viagem nos pontos limite AGB/AGH. A mesma velocidade adoptada durante as operações de emergência | ▲▼ (Aumentar/Diminuir) | 1 s <-> 15 s | 10 % |
| Atraso Dir.-BRK | VVVF: Atraso entre a activação da direcção de viagem e o comando BRK (início) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Outros |
| OLEO: atraso Estrela / Delta | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Estrela/Delta 0,0 s - Outros |
|
| Atraso BRK-S | Atraso entre a activação do comando BRK e o início da rampa de velocidade analógica | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Outros |
| Atraso BRK-Dir. | Atraso entre a desactivação do comando de execução e a desactivação do sentido de marcha (parar no chão) | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Outros |
| Emergência BRK On | Parâmetro de modulação de ruptura de emergência | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 5,0 s | 0,0s |
| BRK de emergência desligado | Parâmetro de modulação de ruptura de emergência | ▲▼ (Aumentar/Diminuir) | 0,0 s <-> 5,0 s | 0,0s |
| Codificador de monitor | Contém informação sobre: Características do codificador, leitura das alturas de abrandamento (R1D / R1S), re-nivelamento (RRIPD / RRIPS) e paragem da cabina (RLD / RLS) onde D indica descida enquanto S significa subida; finalmente contém informação sobre a leitura das alturas AGB / AGH e ZP. Nota: as alturas R1D e R1S podem ser modificadas empurrando Enter sem repetir o procedimento de auto-aprendizagem (para deixar a distância de abrandamento ser igual em subida e descida). | |||
| Zona da Porta | Comprimento da zona da porta ZP em mm |
NOTA: Favor consultar o diagrama temporal no final deste manual, para melhor compreender alguns significados dos parâmetros.
Menu "VVVF".
Este menu só está disponível quando um FUJI FRENIC LIFT VVVF está ligado a uma placa de elevação de controlo.
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < VVVF > |
| Bacalhau. | Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|---|
| F03 | Velocidade máxima | Velocidade máxima do motor | ◄► (Selecção) ▲▼ (Alterar valor) | 150-3600 RPM | 1500 RPM |
| F05 | Tensão Nominal | Tensão nominal do motor accionado pelo inversor | ◄► (Selecção) ▲▼ (Alterar valor) | 80-240 V (para séries de classe de 200V) | 230 V |
| 160-500 V (para séries de classe de 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa de aceleração (Apenas com sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-99,9 s | 1,8 s |
| F08 | Dez T2 | Rampa de aceleração (Apenas com sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-99,9 s | 1,8 s |
| F42 | Modo de controlo | Modo de controlo | ◄► (Selecção) ▲▼ (Alterar valor) | 0-1-2 | 0 (Accionamentos com engrenagens, circuito fechado) 1 (accionamentos gearless, circuito fechado) 2 (Accionamentos com engrenagens, circuito aberto) |
| E12 | Acc/dec T5 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selecção) ▲▼ (Alterar valor) | 0.00 – 99.9 s | 1,8 s | |
| C07 | Velocidade de rastejamento | Velocidade de rastreio (Apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 4,0 Hz (accionamentos com engrenagens, circuito aberto) 2,5 Hz (accionamentos com engrenagens, circuito fechado) 1,5 Hz (accionamentos sem engrenagens, circuito fechado) |
|
| C10 | Velocidade média | Velocidade do sistema em modo de inspecção (Apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 25 Hz (Accionamentos com engrenagens) 10 Hz (accionamentos gearless) |
|
| C11 | Alta velocidade | Alta velocidade para mudança de velocidade em várias etapas (Apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 50 Hz (Accionamentos com engrenagens) 20 Hz (accionamentos gearless) |
|
| P01 | Polos motores | Número de pólos do motor | ◄► (Selecção) ▲▼ (Alterar valor) | Ver placa do motor | 4 (Accionamentos com engrenagens) 20 (accionamentos gearless) |
| P02 | Tampa de motor | Potência nominal do motor | ◄► (Selecção) ▲▼ (Alterar valor) | Ver placa do motor | Função do tamanho do Inversor |
| P03 | Cachalote Motor Rated Cur | Intensidade nominal da corrente do motor | ◄► (Selecção) ▲▼ (Alterar valor) | Ver placa do motor | Função do tamanho do Inversor |
| P04 | Auto-regulação Automóvel | Auto afinação dos parâmetros do motor (apenas transmissões por engrenagens) | ◄► (Selecção) ▲▼ (Alterar valor) | 0 (2 para accionar o procedimento de sintonização automática das transmissões por engrenagens) | |
| P06 | Moeda M-No-Load. | Corrente sem carga do motor | ◄► (Selecção) ▲▼ (Alterar valor) | Configurado por Motor Autotuning (Accionamentos com engrenagens) 0 A (accionamentos gearless) |
|
| P12 | Escorregão com classificação M | Frequência nominal de escorregamento do motor | ◄► (Selecção) ▲▼ (Alterar valor) | 0-15Hz | Configurado por Motor Autotuning |
| L01 (*) | PG seleccionar | Ver definição do elevador VVVF Frenic | ◄► (Selecção) ▲▼ (Alterar valor) | 0-5 | 0 (Accionamentos com engrenagens) 4 (accionamentos gearless com codificador EnDat) 5 (accionamentos sem engrenagem com codificador sin-cos) |
| L02 (*) | Resolução PG | Resolução do codificador de impulsos (Pulso/ Volta) | ◄► (Selecção) ▲▼ (Alterar valor) | 360-60000 P/R | 1024 (Accionamentos com engrenagens) 2048 (accionamentos gearless) |
| L19 | Curva S 1 | Curva-S - 1 | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L24 | Curva S 6 | Curva S - 6 | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L25 | Curva S 7 | Curva-S - 7 | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L26 | Curva S 8 | Curva-S - 8 | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L27 | Curva S 9 | Curva-S - 9 | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L82 | Travagem por atraso | Atraso na activação da saída do BRKS | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10,00 S | 0,20 s |
| L83 | Atraso de Travagem | Atraso na desactivação da saída do BRKS | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10,00 S | 0,10 s |
(*) - Não disponível no modelo LM2C Inverters.
| Bacalhau. | Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|---|
| F01 | Comando de velocidade | Selecção de comandos para variação de velocidade | ◄► (Selecção) ▲▼ (Alterar valor) | 0=MULTISPEED 1=NR Analógico (não polarizado) não disponível | 0 (com sistema de posicionamento FAI/FAS) 1 (com sistemas de posicionamento do codificador) |
| F03 | Velocidade máxima | Velocidade máxima do motor | ◄► (Selecção) ▲▼ (Alterar valor) | 150-3600 RPM | 1500 RPM |
| F04 | Velocidade nominal | Velocidade nominal do motor (Frequência) | ◄► (Selecção) ▲▼ (Alterar valor) | 50 Hz | |
| F05 | Tensão Nominal | Tensão nominal do motor accionado pelo inversor | ◄► (Selecção) ▲▼ (Alterar valor) | 80-240 V (para séries de classe de 200V) | 230 V |
| 160-500 V (para séries de classe de 400V) | 380 V | ||||
| F07 | Acc T1 | Rampa de aceleração (apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-99,9 s | 1,8 s |
| F08 | Dez T2 | Rampa de desaceleração (apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-99,9 s | 1,8 s |
| F09 | TRQ Boost | Aumento de torque | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0-5,0 | 0,0 (até 7,5 kW e a partir de 30 kW) 0,3 (de 11 kW a 22 kW) |
| F10 | OL electrónica | Protecção eléctrica de sobrecarga | ◄► (Selecção) ▲▼ (Alterar valor) | 1 - 2 | 2 |
| F11 | Nível de sobrecarga | Protecção térmica electrónica de sobrecarga do motor (Valor em Ampere igual ao tamanho do inversor) | ◄► (Selecção) ▲▼ (Alterar valor) | 1 a 200% da corrente nominal | 100 % |
| F12 | Tempo de sobrecarga | Constante térmica de tempo | ◄► (Selecção) ▲▼ (Alterar valor) | 0,5 - 75,0 min. | 0,5 |
| F20 | Velocidade de travagem DC | Limiar de frequência para DC INJECTION | ◄► (Selecção) ▲▼ (Alterar valor) | 0,2 Hz (Circuito aberto) 0,0 Hz (Circuito fechado) |
|
| F21 | DC Nível de travagem | Limiar de intensidade para DC INJECTION | ◄► (Selecção) ▲▼ (Alterar valor) | 50 % (Circuito aberto) 0 % (Circuito fechado) |
|
| F22 | Freio DC T | DC INJECTION time | ◄► (Selecção) ▲▼ (Alterar valor) | 1,0 s (Circuito aberto) 0,0 s (Circuito fechado) |
|
| F23 | Velocidade inicial | Velocidade de arranque (em Hz) para o inversor | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-150 | 0,50 Hz (Circuito aberto) 0,00 Hz (Circuito fechado) |
| F24 | Tempo de retenção | Tempo de manutenção de funcionamento à velocidade de arranque do inversor | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10 s | 0,8 s (FAI/FAS) 0,2 s (Codificador) |
| F25 | Velocidade de Paragem | Velocidade de paragem (em Hz) para o inversor | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0 Hz (FAI/FAS) 0,1 Hz (Codificador) |
|
| F26 | Som do motor | Frequência portadora | ◄► (Selecção) ▲▼ (Alterar valor) | 15 kHz | |
| F42 | Modo de controlo | Modo de controlo | ◄► (Selecção) ▲▼ (Alterar valor) | 0-1-2 | 0 (accionamentos com engrenagens, circuito fechado) 1 (accionamentos sem engrenagens, circuito fechado) 2 (accionamentos com engrenagens, circuito aberto) |
| F44 | Limitador de corrente | Nível de ativação do limitador de corrente. % para a corrente nominal do inversor. Se "Auto", o valor significa que não há limitação de corrente | ◄► (Selecção) ▲▼ (Alterar valor) | 100% <-> 230% ou Auto | 200 % |
| E04 | Comando X4 | Entrada X4 não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 25 | |
| E05 | Comando X5 | Entrada X5 não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 25 | |
| E06 | Comando X6 | Entrada X6 não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 25 | |
| E07 | Comando X7 | Entrada X7 não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 25 | |
| E08 | Comando X8 | Entrada X8 não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 63 | |
| E10 | Acc/dec T3 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E11 | Acc/dec T4 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E12 | Acc/dec T5 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E14 | Acc/dec T7 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Selecção) ▲▼ (Alterar valor) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00 -99,9 s | 1,8 s | |
| E20 | Sinal Y1 | Saída Y1 (transístor) não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 27 | |
| E21 | Sinal Y2 | Saída Y2 (transístor) não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 27 | |
| E22 | Sinal Y3 | Saída Y3 (transístor) não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 27 | |
| E23 | Sinal Y4 | Saída Y4 (transístor) não utilizada | ◄► (Selecção) ▲▼ (Alterar valor) | 25 | |
| E30 | Arranjo da velocidade Hyst | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | 0,48 Hz (motoredutor) 0,1 Hz (motor Gearless) |
|
| E31 | Velocidade Det.Lev | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | 48,33Hz | |
| E32 | Det Hyst de velocidade | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | 0,48 Hz (motoredutor) 0,1 Hz (motor Gearless) |
|
| E39 | Nível RRD | Direcção recomendada em caso de emergência (Não utilizado) | ◄► (Selecção) ▲▼ (Alterar valor) | 0% | |
| E61 | Entrada analógica 12 | Função da entrada analógica 12 | ◄► (Selecção) ▲▼ (Alterar valor) | 0-2 | 1 |
| E98 | Comando FWD | Função para terminal de parafuso FWD | ◄► (Selecção) ▲▼ (Alterar valor) | 98 | |
| E99 | Comando REV | Função para terminal de parafuso REV | ◄► (Selecção) ▲▼ (Alterar valor) | 99 |
| Bacalhau. | Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Limitação do binário em caso de emergência. Se "OFF", o valor significa que não há limitação de corrente | ◄► (Selecção) ▲▼ (Alterar valor) | 0% <-> 100% ou OFF | 0 |
| C02 | BATRY TL T | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0 s | ||
| C03 | Velocidade da bateria | Velocidade durante a corrida de emergência | ◄► (Selecção) ▲▼ (Alterar valor) | 1,50 Hz | |
| C07 | Velocidade de rastejamento | Velocidade de rastreio (apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 4,0 Hz (accionamentos com engrenagens, circuito aberto) 2,5 Hz (accionamentos com engrenagens, circuito fechado) 1,5 Hz (accionamentos sem engrenagens, circuito fechado) |
|
| C10 | Velocidade média | Velocidade do sistema em modo de inspecção (apenas com o sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 25 Hz (Accionamentos com engrenagens) 10 Hz (accionamentos gearless) |
|
| C11 | Alta velocidade | Alta velocidade para mudança de velocidade em várias etapas (sistema de posicionamento FAI/FAS) | ◄► (Selecção) ▲▼ (Alterar valor) | 50 Hz (Accionamentos com engrenagens) 20 Hz (accionamentos gearless) |
|
| P01 | Polos motores | Número de pólos do motor | ◄► (Selecção) ▲▼ (Alterar valor) | (ver placa do motor) | 4 (Accionamentos com engrenagens) 20 (accionamentos gearless) |
| P02 | Tampa de motor | Potência nominal do motor | ◄► (Selecção) ▲▼ (Alterar valor) | (ver placa do motor) | Função do tamanho do inversor |
| P03 | Cachalote Motor Rated Cur | Intensidade nominal da corrente do motor | ◄► (Selecção) ▲▼ (Alterar valor) | (ver placa do motor) | Função do tamanho do inversor |
| P04 | Auto-regulação Automóvel | Auto afinação dos parâmetros do motor (apenas transmissões por engrenagens) | ◄► (Selecção) ▲▼ (Alterar valor) | 0 (2 para accionar o procedimento de sintonização automática das transmissões por engrenagens) | |
| P06 | Moeda M-No-Load. | Corrente sem carga do motor | ◄► (Selecção) ▲▼ (Alterar valor) | Configurado por Motor Autotuning (Accionamentos com engrenagens) 0 A (accionamentos gearless) |
|
| P07 | M-%R1 | Motor (%R1) | ◄► (Selecção) ▲▼ (Alterar valor) | Configurado por Motor Autotuning (Accionamentos com engrenagens) 5 % (accionamentos gearless) |
|
| P08 | M-%X | Motor (%X) | ◄► (Selecção) ▲▼ (Alterar valor) | Configurado por Motor Autotuning (Accionamentos com engrenagens) 10 % (accionamentos gearless) |
|
| P09 | Condução M-Slip | Ganho de compensação de deslizamento em percentagem do deslizamento nominal (P12) no lado do condutor | 0,0 - 200% | Configurado por Motor Autotuning | |
| P10 | Travagem M-Slip | Ganho de compensação de escorregamento em percentagem do escorregamento nominal (P12) nos lados da travagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0 - 200% | Configurado por Motor Autotuning |
| P11 | M-Slip T | Valor do tempo de compensação de deslizamento (fixo) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,2 s | |
| P12 | Escorregão com classificação M | Frequência nominal de escorregamento do motor | ◄► (Selecção) ▲▼ (Alterar valor) | 0 - 15 Hz | Configurado por Motor Autotuning |
| P60 | Resistência da armadura - Rs | ◄► (Selecção) ▲▼ (Alterar valor) | Ohm | De acordo com o quadro Motor MX*** | |
| P62 | Reactância do eixo q da armadura - Xs | ◄► (Selecção) ▲▼ (Alterar valor) | Ohm | De acordo com o quadro Motor MX*** | |
| P63 | Tensão indutiva interfásica - E | ◄► (Selecção) ▲▼ (Alterar valor) | V | De acordo com o quadro Motor MX*** | |
| P65 | correção da saturação magnética da indutância do eixo q | ◄► (Selecção) ▲▼ (Alterar valor) | % | De acordo com o quadro Motor MX*** | |
| H04 | Tempo de reinicialização automática | Reposição automática (Número de vezes) | ◄► (Selecção) ▲▼ (Alterar valor) | 10 | |
| H05 | Auto reset int | Reinicialização automática (Intervalo de reinicialização) | ◄► (Selecção) ▲▼ (Alterar valor) | 5 s | |
| H06 | Ventilador de arrefecimento CTRL | Atraso no desligamento da ventoinha de arrefecimento (O valor automático significa que não há limite para o controlo da ventoinha; a ventoinha está sempre ligada) | ◄► (Selecção) ▲▼ (Alterar valor) | 0 min. <-> 100 min. ou Auto | 5 min |
| H57 | Curva S 11 | Curva para S-11 | ◄► (Selecção) ▲▼ (Alterar valor) | 0 - 50% | 20% |
| H58 | Curva S 12 | Curva para S-12 | ◄► (Selecção) ▲▼ (Alterar valor) | 0 - 50% | 20% |
| H64 | Tempo de espera zero | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0 s (com sistema de posicionamento FAI/FAS) 0,8 s (com sistemas de posicionamento de codificadores) |
||
| H65 | Hora de início suave | ◄► (Selecção) ▲▼ (Alterar valor) | 0,0 s (com sistema de posicionamento FAI/FAS) 0,0 s (com sistemas de posicionamento de codificadores) |
||
| H67 | Parar o tempo de espera | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00 s (Circuito aberto) 1,00 s (Circuito fechado) |
||
| H96 | Monitor de travagem | Activar o monitor de travagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0-1 | 0 |
| H190 | Encomenda de motor UVW | Sequenza fasi uscita motore | ◄► (Selecção) ▲▼ (Alterar valor) | 0-1 | 1 |
| Bacalhau. | Parâmetro | Descrição | Navegação | Valores | Valor por defeito |
|---|---|---|---|---|---|
| L01 (*) | PG seleccionar | Ver definição do elevador VVVF Frenic | ◄► (Selecção) ▲▼ (Alterar valor) | 0-5 | 0 (Accionamentos com engrenagens) 4 (accionamentos gearless com codificador EnDat) 5 (accionamentos sem engrenagem com codificador sin-cos) |
| L02 (*) | Resolução PG | Resolução do codificador de impulsos (Pulso/ Volta) | ◄► (Selecção) ▲▼ (Alterar valor) | 360-60000 P/R | 1024 (Accionamentos com engrenagens) 2048 (accionamentos gearless) |
| L03 (*) | P.P.P.Tuning | Ver definição do elevador VVVF Frenic | ◄► (Selecção) ▲▼ (Alterar valor) | ||
| L04 (*) | P.P.Offset | Deslocamento da posição do pólo magnético (ângulo de desvio) para accionamentos sem engrenagens | ◄► (Selecção) ▲▼ (Alterar valor) | Definido automaticamente durante a afinação da posição do pólo (L03) | |
| L05 (*) | ACR P ganho | ◄► (Selecção) ▲▼ (Alterar valor) | 1,5 | ||
| L07 (*) | Seleção automática de sintonização de pólos | ◄► (Selecção) ▲▼ (Alterar valor) | De acordo com o quadro Motor MX*** | ||
| L19 | Curva S 1 | L19 a L28 especificam zonas de curva S a serem aplicadas a operações impulsionadas por comandos de velocidade em várias etapas com aceleração/desaceleração da curva S. | ◄► (Selecção) ▲▼ (Alterar valor) | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|
| L20 | S-Curve2 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L21 | Curva S 3 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L22 | Curva S 4 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L23 | Curva S 5 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L24 | Curva S 6 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L25 | Curva S 7 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L26 | Curva S 8 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L27 | Curva S 9 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L28 | S-Curva 10 | 20 % (Accionamentos com engrenagens) 25 % (accionamentos gearless) |
|||
| L29 | SFO Hold T | Operação de piso curto (tempo de espera) Utilizado apenas para o modo de posicionamento FAI-FAS | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00s. <-> 10,00s. ou DESLIGADO | DESLIGADO |
| L30 | Velocidade SFO | Funcionamento em pisos curtos (velocidade permitida) - NÃO UTILIZADO | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00 s | |
| L36 (*) | ASR P Ganho Alto | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 10,00 (Accionamentos com engrenagens) 2,50 (accionamentos gearless) |
|
| L37 (*) | ASR I Ganho Alto | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0,100 | |
| L38 (*) | ASR P Ganho baixo | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 10,00 (Accionamentos com engrenagens) 2,50 (accionamentos gearless) |
|
| L39 (*) | ASR I Ganho baixo | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0,100 | |
| L40 (*) | Velocidade de comutação 1 | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | 5,00 (Accionamentos com engrenagens) 1,00 (accionamentos gearless) |
|
| L41 (*) | Velocidade de comutação 2 | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | 10,00 (Accionamentos com engrenagens) 2,00 (accionamentos gearless) |
|
| L42 (*) | Ganho ASR-FF | ◄► (Selecção) ▲▼ (Alterar valor) | 0.000 – 10.000 s | 0.000 s | |
| L55 (*) | Hora de início da TB | ◄► (Selecção) ▲▼ (Alterar valor) | 0.00 – 1.00 s | 0.20 s | |
| L56 (*) | TB Tempo final | ◄► (Selecção) ▲▼ (Alterar valor) | 0.00 – 20.00 s | 0.20 s | |
| L64 (*) | TB Digital 3 | ◄► (Selecção) ▲▼ (Alterar valor) | -200 - +200 % | 0 % | |
| L65 (*) | Operação ULC | Compensação de carga desequilibrada | ◄► (Selecção) ▲▼ (Alterar valor) | 0-1 | 1 |
| L66 (*) | Activação ULC | Compensação de carga desequilibrada (Tempo de activação) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,01-2 s | 2,00 s |
| L68 (*) | ULC ASR P ganho | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 10 (FAI/FAS) 10 (Codificador) |
|
| L69 (*) | ULC ASR I ganha | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0,01 (FAI/FAS) 0,01 (Codificador) |
|
| L73 (*) | APR P ganho zero | Ver controlo Rollback e conforto de viagem | ◄► (Selecção) ▲▼ (Alterar valor) | 0 (FAI/FAS) 0 (Codificador) |
|
| L74 (*) | APR D Ganho | ◄► (Selecção) ▲▼ (Alterar valor) | 0.0 | ||
| L75 (*) | Tempo de filtragem | ◄► (Selecção) ▲▼ (Alterar valor) | 0.000 s | ||
| L76 (*) | Constante ACR P | ◄► (Selecção) ▲▼ (Alterar valor) | 0.00 | ||
| L80 | Modo de travagem | Modo de saída de controlo de travagem (BRKS) | ◄► (Selecção) ▲▼ (Alterar valor) | 1-2 | 1 |
| L81 | Travagem ao nível | Corrente de saída que liga o sinal BRKS quando L80 = 2. | ◄► (Selecção) ▲▼ (Alterar valor) | 0,-200% da corrente sem carga do motor | 100 % |
| L82 | Travar Com atraso | Atraso na activação da saída do BRKS | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10,00 Sec | 0,20 s |
| L83 | Atraso de Travagem | Atraso na desactivação da saída do BRKS | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-100 Seg | 0,10 s |
| L84 | Verificação BRKS t | Tempo admissível entre a saída BRKS e a entrada BRKE (Er6) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10 seg | 0,00 s |
| L99 | ACTION SEL | Não utilizado | ◄► (Selecção) ▲▼ (Alterar valor) | ||
| L122 | Del. Potência de entrada Nível de deteção | ◄► (Selecção) ▲▼ (Alterar valor) | % | ||
| L124 | Del. Op. Dir. Calc. Temporizador de Atraso | ◄► (Selecção) ▲▼ (Alterar valor) | s. | ||
| L130 | Diâmetro da roldana (Ds) | ◄► (Selecção) ▲▼ (Alterar valor) | mm | De acordo com o quadro Motor MX*** | |
| L131 | Diâmetro do codificador (Ds) | ◄► (Selecção) ▲▼ (Alterar valor) | mm | De acordo com o quadro Motor MX*** | |
| L132 | Banda de compensação Theta | ◄► (Selecção) ▲▼ (Alterar valor) | deg | De acordo com o quadro Motor MX*** | |
| L133 | Limitador inferior do ganho de compensação Theta | ◄► (Selecção) ▲▼ (Alterar valor) | De acordo com o quadro Motor MX*** | ||
| L134 | Tempo de contra-relógio | Tempo de contra-relógio (Quando L65 = 2) | ◄► (Selecção) ▲▼ (Alterar valor) | 0,00-10,00 s | 0 |
| L198 | Op. set switch 1 | BIT0 = É possível fixar a frequência portadora a 16 kHz para toda a gama de velocidades, a fim de reduzir o ruído de condução. | ◄► (Selecção) ▲▼ (Alterar valor) | 0 | |
| L199 | Op. set switch 2 | Reservado. | ◄► (Selecção) ▲▼ (Alterar valor) | 0 |
(*) - Não disponível no modelo LM2C Inverters.
NOTA: Favor consultar o diagrama de tempo para melhor compreender alguns parâmetros de significado.
"Menu "Parâmetros Rec
Nota: a poupança de dados não é necessária apenas para a emulação de controladores PBV3.
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Parâmetros Rec > |
| Piso 0 12:30:56 < Parâmetros Rec > | ----- ENTRAR ----> | Piso 0 12:30:56 < Parâmetros Rec > Salvar Parâmetros | ----- ENTER ----> <----- ESC ------ | Piso 0 12:30:56 < Parâmetros Rec > Salvar Parâmetros Tem a certeza ? |
| ▲ ▼ | ENTRAR ↓ |
|||
| Piso 0 12:30:56 < Parâmetros Rec > Salvar Parâmetros Fim de reg. |
||||
| Piso 0Piso 0 12:30:56 < Parâmetros Rec > Parâmetros de reinicialização | ----- ENTER ----> <----- ESC ------ | Piso 0Piso 0 12:30:56 < Parâmetros Rec > Parâmetros de reinicialização Tem a certeza ? |
||
| ENTRAR ↓ |
||||
| Piso 0Piso 0 12:30:56 < Parâmetros Rec > Parâmetros de reinicialização Fim de reg. |
||||
"Menu "Relógio
| ----->>>>> | | ----->>>>> | Piso 0 - 12:30:56 < Relógio > |
- Da = Dia
- Mo = Mês
- Yr = Ano
- D = Dia da semana (1=Mon)
- Hr = Horas
- Mn = Acta

AVISO: Em caso de paragem do sistema, o tempo é poupado por meio de um Super Capacitor (por até 5 dias sem alimentação eléctrica).
VVVF Frenic Lift Setting
- Procedimento de afinação -
Seleccione "Menu de instalação".

No ecrã aparecerá:

Confirmar pressionando OK e seleccionar "Máquina / VVVF Autotuning":
Inserir o parâmetro solicitado e passar para o parâmetro seguinte premindo a Seta Direita.
A lista de parâmetros VVVF é:
| Parâmetro | Descrição | Motor Gearless | Motor Geared |
|---|---|---|---|
| P01 - Pólos motores | Inserir o número do Pólo Motor | X | X |
| F03 - Velocidade máxima | Inserir velocidade máxima do motor [RPM] (placa do motor) | X | X |
| F04 - Corrente Nominal | Inserir Velocidade nominal do motor [Hz] (Placa motorizada) | X | X |
| F05 - Tensão Nominal | Inserir tensão nominal do motor [V] (Placa motorizada) | X | X |
| P08 - M-%X | Inserir valor 10 | X | |
| P07 - M-%R1 | Inserir valor 5 | X | |
| P06 - M-No Load Currency. | Inserir valor 0 [A] | X | |
| P03 - Corrente Nominal Motorizada | Inserir corrente nominal [A] (Placa motorizada) | X | |
| P02 - Tampa de motor | Inserir potência nominal [kW] (Placa motorizada) | X | |
| C11 - Alta Velocidade | Inserir alta velocidade [Hz] (Placa motorizada) | X | |
| C10 - Velocidade Média | Inserir velocidade média [Hz] (Velocidade de inspecção) | X | |
| C07 - Creep Speed | Inserir baixa velocidade [Hz] (10% de C11) | X | |
| L01 - PG select | Tipo de codificador de motor definido: (Placas Opcionais VVVF) | X | X (*) |
| L02 - Resolução PG | Inserir resolução do codificador motor | X | X (*) |
(*) Apenas loop fechado
O último parâmetro é diferente de acordo com o tipo de motor:
motor GEARLESS:
 Seleccione 4 : Afinação estática
Seleccione 4 : Afinação estáticaSeleccione 5 : Afinação dinâmica (apenas se livre de cordas)
motor GEARED:
 Seleccione 3
Seleccione 3Em caso de qualquer problema, vá ao menu Falha para identificar o problema (§ Erros de afinação do motor)
No final do procedimento, pressionar o botão para cima/para baixo e verificar a direcção correcta do movimento da cabina do elevador; se não estiver correcta, inverter os valores dos parâmetros E98 e E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Especificações do codificador | Quadro codificador | Motor | |
| Canal de saída A/B | Sinal Absoluto | |||
| 0 | Colector aberto / Push-Pull | = | OPC-PG3 | IM |
| Motorista de linha | = | OPC-PMPG | ||
| 1 | Colector aberto / Push-Pull | Z | OPC-PG3 | IM & PMSM |
| 4 | Diferencial senoidal (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS ou OPC-PSH | PMSM |
| 5 | Diferencial senoidal (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Diferencial senoidal (1Vpp) | BISS-C (Sendix 5873) | OPC-PS ou OPC-PSH | PMSM |
| 7 | Diferencial senoidal (1Vpp) | SSI (ECN1313) | OPC-PS ou OPC-PSH | PMSM |
| 8 | Diferencial senoidal (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Código | Descrição | |
|---|---|---|
| OC1 | Excesso de corrente durante a aceleração | A corrente momentânea de saída do inversor excedeu a nível de sobre-corrente. |
| OC2 | Excesso de corrente durante a desaceleração | |
| OC3 | Excesso de corrente durante a corrida a uma velocidade constante | |
| EF | Falha no solo | Corrente de fase zero causada por falha de terra na saída excedeu o limite admissível. (30kW ou superior) |
| OV1 | Sobrevoltagem durante a aceleração | A tensão do barramento da ligação CC excedeu a detecção de sobretensão nível. |
| OV2 | Sobrevoltagem durante a desaceleração | |
| OV3 | Sobrevoltagem durante a corrida a uma velocidade constante | |
| LV | Subvoltagem | A tensão do barramento de ligação DC caiu abaixo do nível de detecção de subvolt. idade |
| Lin * | Perda de fase de entrada | Ocorreu uma perda de fase de entrada ou a tensão Interfásica a taxa de desequilíbrio era grande. |
| OH1 | Sobreaquecimento do dissipador de calor | A temperatura em torno do dissipador de calor subiu anormalmente. |
| OH2 | Alarme externo | O alarme externo THR foi introduzido. (quando o THR "Activar o disparo do alarme externo" tiver sido atribuído a qualquer terminal de entrada digital) |
| OH3 | Sobreaquecimento interno do inversor | A temperatura no interior do inversor excedeu a limite admissível. |
| OH4 | Protecção do motor (PTC/NTC thermistor) | A temperatura do motor subiu de forma anormal. |
| DBH | Sobreaquecimento do registo de travagem | A temperatura da resistência de travagem excedeu o limite permitido. |
| OL1 | Sobrecarga do motor 1 | A protecção térmica electrónica para detecção de sobrecarga do motor foi activada. |
| OLU | Sobrecarga do inversor | A temperatura no interior do IGBT subiu anormalmente. |
| OS | Prevenção do excesso de velocidade | A velocidade do motor é superior à velocidade máxima * L32. |
| PG | Cablagem avariada no PG | A velocidade do motor é superior à velocidade máxima * L32. |
| nrb | Erro de quebra de fio NTC | Detectou uma quebra de fio no circuito de detecção do termistor do NTC. |
| Er1 | Erro de memória | Ocorreu um erro ao escrever dados para o inversor memória. |
| Er2 | Erro de comunicação do teclado | Ocorreu um erro de comunicação entre a chave e o inversor. |
| Er3 | Erro de CPU | Ocorreu um erro de CPU ou erro de LSI. |
| Er4 | Opção erro de comunicação | Ocorreu um erro de comunicação entre os ligados cartão de opção e o inversor. |
| Er5 | Erro de opção | Um erro foi detectado pelo cartão de opção ligado (não por o inversor). |
| Er6 | Protecção de funcionamento | Foi tentada uma operação incorrecta. |
| Er7 | Erro de afinação | A afinação automática ou a afinação da posição do pólo magnético falhou, resultando em resultados de afinação anormais. |
| Er8 | Erro de comunicação RS-485 (porta 1) | Ocorreu um erro de comunicação durante o RS-485 comunicação. |
| ErP | Erro de comunicação RS-485 (porta 2) | |
| OPL | Perda de fase de saída | Ocorreu uma perda de fase de saída. |
| ErE | Desadequação de velocidade | A velocidade de referência e a velocidade de detecção são diferentes. |
| ErF | Erro de economia de dados durante a subtensão | Quando a protecção de subtensão foi activada, o inversor não salvou os dados, mostrando este erro. |
| ErH | Erro de hardware | O LSI na placa de circuito impresso de potência não funcionou devido ao ruído, etc. |
| Ert | CAN abrir erro de comunicação | Ocorreu um erro de comunicação durante a comunicação CANopen. |
| ECF | EN1, EN2 erro de circuito de terminais | Foi diagnosticada uma anomalia no circuito de terminais EN1, EN2. |
| Ot | Corrente de excesso de torque | A corrente de torque de referência tornou-se excessiva. |
| DBA | Transistor de travagem partido | Detecção de uma anomalia no transistor de travões |
| bbE | Confirmação do travão | O inversor detecta o desajuste entre o sinal de controlo de travagem e o sinal de detecção de travagem (feedback). |
| Eo | EN1, EN2 terminais de tagarelice | Detecção de colisão entre a saída ENOFF e os terminais EN1/EN2. |
| ECL | Erro lógico personalizável | Um erro de configuração lógica personalizável causou um alarme. |
| OH6 | Sobreaquecimento da resistência de carregamento | A temperatura da resistência de carga dentro do inversor excedeu o limite permitido. |
| rbA | Alarme de salvamento por freio | Nenhum movimento detectado durante a operação de salvamento por controlo de travagem. |
| tCA | Atingir o número máximo de viagens balcão | O número de mudanças de direcção de viagem atingiu o nível pré-definido. |
| SCA | Erro de controlo de curto-circuito | O inversor detecta o desajuste entre o curto-circuito sinal de controlo e sinal de detecção de curto-circuito (feedback). |
| LCO | Sobrecarga de célula de carga | A função célula de carga detectou uma situação de sobrecarga por meio de nível predefinido. |
| Código | Nome do alarme | Subcódigo | Descrição |
|---|---|---|---|
| OC1 | Excesso de corrente durante a aceleração | 1 | Protecção contra sobrecorrente (interrupção OCT) - Sobrecorrente normal |
| 2 | Protecção de sobrecorrente (interrupção OCL) - Sobrecorrente normal | ||
| OC2 | Excesso de corrente durante a desaceleração | 3 | Protecção contra curto-circuitos - Sobrecorrente no início |
| 4 | Protecção de falha à terra - Sobre corrente no início | ||
| OC3 | Sobrecorrente durante velocidade constante | 5 | Falha do sinal de detecção (FAULT signal) - Circuito de porta |
| 11 | Falha do sinal de detecção (sinal OCT) - Circuito de detecção (PPCB) | ||
| 12 | Falha do sinal de detecção (sinal OCL) - Circuito de detecção (PPCB) | ||
| OV1 | Sobrevoltagem durante a aceleração | 1 11 | Protecção contra sobretensão (sinal OVT) Falha do sinal de detecção (sinal OVT) |
| OV2 | Sobrevoltagem durante a desaceleração | ||
| OV3 | Sobrevoltagem durante velocidade constante | ||
| Lin | Perda de fase de entrada | 1 | Detecção do nível de protecção de díodos rectificadores |
| 2 | Detecção do nível de tolerância de funcionamento contínuo | ||
| OPL | Perda de fase de saída | 1 | |
| OH1 | Sobreaquecimento da barbatana de arrefecimento | 1 | Sobreaquecimento da barbatana de arrefecimento (NTC2) |
| 3 | Sobreaquecimento do conversor (NTC4) | ||
| 11 | Desconexão do termistor (NTC2) | ||
| OH2 | Falha externa | 0 | Protecção através do THR |
| OH3 | Sobreaquecer dentro do inversor | 0 | Sobreaquecimento interno do ar (NTC1) |
| OH4 | Protecção de motores (PTC termistor) | 1 | Termistor de PTC |
| 2 | Termistor NTS | ||
| OH6 | Sobreaquecimento da resistência de carregamento | 1 | Sobreaquecimento da resistência de carregamento Excepto FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Desconexão do termistor (NTC3) | ||
| OL1 | Sobrecarga do motor | 0 | Detecção de corrente térmica electrónica |
| LV | Subvoltagem | 1 | A subvoltagem ocorre durante o portão ON |
| 11 | Nível mínimo de funcionamento da bateria | ||
| dbH | Sobreaquecimento da resistência DB | 0 | Sobreaquecimento da resistência DB (F50 <-> F52) |
| 1 | Transistor DB 2sec_ON contínuo (R demasiado alto) | ||
| dbA | Detecção de falha de transistor DB | 0 | Detecção de falha de transistor DB |
| Er1 | Erro de memória | 0x0001 | Destruição da história do alarme |
| 0x0002 | Código de função padrão | ||
| 0x0004 | Código de função do utilizador | ||
| 0x0008 | Código de função oculta | ||
| 0x0010 | Erro na área do programa | ||
| 0x0040 | Incompatibilidade de leitura (repetir a leitura) | ||
| 0x0080 | Descoordenação de escrita (nova tentativa) | ||
| 0x0100 | Área estendida | ||
| 0x1000 | Área de valor de ajuste | ||
| Er2 | Erro de comunicação do painel do teclado | 1 | Detecção de desconexão |
| Er3 | Erro de CPU | 1 | Reinício do processamento da CPU |
| 1000 | Erro do checksum do código de função (erro de RAM) | ||
| 0x0001 | Erro de código de função padrão | ||
| 0x0002 | Erro de código de função oculto (código u) | ||
| 0x0004 | Erro de código de função oculto (n código) | ||
| 0x0008 | Erro de código de função da válvula de regulação | ||
| 0x0010 | Área estendida | ||
| 2000 | Erro de ciclo fixo | ||
| 0x0001 | L1 erro de ciclo | ||
| 0x0004 | L3 erro de ciclo | ||
| 0x0008 | L4 erro de ciclo | ||
| 0x0020 | L6 erro de ciclo | ||
| 0x0080 | Erro de ciclo LP | ||
| 3000 | Corte injusto | ||
| 5001 | Entrada exterior do RST | ||
| 7001 | Destruição da zona de empilhamento | ||
| 9000 | Detecção de falhas de software | ||
| 0x0200 | Alarme QUE acabou | ||
| Er4 | Opção erro de comunicação | 1 | Porta Um erro de comunicação Não há opção |
| 3 | Erro de comunicação da porta C | ||
| 10 | Um excesso da opção instalada Não há opção |
||
| Er5 | Erro de opção | 0 | Opção in-match |
| 1 | Sinal de conclusão ON (Não há opção) | ||
| 10 | Erro AIO PT EEPROM (Não há opção) | ||
| 26 | Erro de informação da posição PR-PP (apenas OPC-PMPG+L01=2) | ||
| 27 | Erro inicial de informação da posição PP | ||
| 50 | Nenhuma área a salvar | ||
| 51 | Erro de comando de comunicação | ||
| 52 | Erro de código de distinção | ||
| 53 | Erro de soma de controlo | ||
| 54 | Erro de escrita | ||
| Er6 | Erro no procedimento de operação | 2 | Iniciar verificação |
| 7 | Erro atribuído a várias velocidades | ||
| 8 | Verificação dos travões (tempo de espera) | ||
| 9 | |||
| 10 | Sem tentativa de afinação da posição do pólo magnético | ||
| 11 | Erro de confirmação do contactor do lado de saída | ||
| 12 | Falta de velocidade de classificação | ||
| 14 | Brake chack (erro atribuído) | ||
| 15 | Curto-circuito (SCC atribuído a erro) | ||
| 16 | Erro de salvamento |
| Código | Nome do alarme | Subcódigo | Descrição |
|---|---|---|---|
| Er7 | Na afinação do motor de indução | 1 | Erro atribuído a várias velocidades |
| 2 | Erro de fase R1 | ||
| 3 | %X erro | ||
| 6 | Erro de corrente de saída | ||
| 7 | Comando de condução OFF | ||
| 9 | Terminal BX ON | ||
| 11 | Detecção de subvoltagem (LV) | ||
| 15 | Alarme ocorre | ||
| 16 | Mudança de comando de condução | ||
| 19 | Outros | ||
| 21 | I0 erro | ||
| 24 | PT terminal | ||
| 25 | Terminal DRS | ||
| Er7 | No momento da detecção de corrente, ajuste de ganho | 32 | Erro de escrita da EEPROM |
| 37 | STOP key_ON | ||
| Er7 | Na afinação magnética da posição dos pólos | 51 | Afinação sem motor |
| 52 | Erro no resultado da afinação da posição do pólo magnético | ||
| 53 | F42 falta de ajuste | ||
| 54 | L04 descoordenação | ||
| Er7 | No ajuste de compensação de detecção de corrente | 61 | Erro de escrita da EEPROM |
| 62 | STOP key_ON | ||
| Er7 | Erro de afinação do motor síncrono | 5058 | Erro de resistência à amatura (limite inferior) |
| 5059 | Erro de resistência à amatura (limite superior) | ||
| 5060 | Erro de Ld (limite inferior) | ||
| 5061 | Erro de Ld (limite superior) | ||
| 5062 | Erro Lq (limite inferior) | ||
| 5063 | Erro Lq (limite superior) | ||
| 5080 | Erro de ganho de ACR (limite superior) | ||
| 5081 | Erro de ganho de ACR (limite inferior) | ||
| Er8 | Erro de comunicação RS485 | 0 | CH1 RS485 erro de comunicação |
| nrb | Detecção de desligamento do termistor NTC | 0 | Detecção de desligamento do termistor NTC |
| OS | Overspeed | 0 | Protecção de sobrevelocidade |
| pg | Erro de PG | 1 | Deteção de desconexão por hardware |
| 2 | Deteção de desconexão da fase Z por software | ||
| 50 | Opção - detecção de desconexão de fase A/B (Pecado) | ||
| 51 | Opção - detecção de desconexão de fase C/D (Pecado) | ||
| 52 | Opção - detecção de desconexão de fase R (Pecado) | ||
| 53 | Opção - detecção de desconexão de fase A/B (pulso) | ||
| 54 | Opção - detecção de desconexão de fase Z (pulso) | ||
| 55 | Opção - detecção de desconexão de fase U/V/W (pulso) | ||
| 60 | Opção - tempo de vigia esgotado | ||
| 61 | Opção - tempo de resposta do codificador em série | ||
| 62 | Opção - erro CRC de comunicação de CPU | ||
| 63 | Opção - CPU fora de erro de comunicação | ||
| 70 | Opção - erro de saída ABZ | ||
| 71 | Opção - codificador de série cada alarme | ||
| 72 | Opção - erro de acesso à memória | ||
| 73 | Opção - erro de culcinação | ||
| 80 | Opção - erro de configuração do cartão PG | ||
| ErE | Descoordenação de velocidade (excesso de desvio de velocidade) | 1 | As marcas de comando de velocidade e detecção de velocidade são diferentes |
| 3 | Excesso de desvio de velocidade (detecção de velocidade > comando de velocidade) | ||
| 5 | A detecção de velocidade continua a ser 0 | ||
| 7 | Excesso de desvio de velocidade (detecção de velocidade < comando de velocidade) | ||
| ErF | Dados de subtensão salvar erro | 0 | Dados de subtensão salvar erro |
| ErP | RS485 2ch erro de comunicação | 0 | CH2 RS485 erro de comunicação |
| Ert | Erro de comunicação CAN | 1 | Bus-off |
| 2 | Detecção de tempo limite de guarda | ||
| OLU | Sobrecarga do inversor | 1 | Protecção IGBT |
| 2 | Inversor térmico Apenas FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | PT erro no circuito | 10 | PT erro de entrada (_EN1A=L, EN2A=L) |
| 11 | PT erro de entrada (_EN1A=H, EN2A=H) | ||
| 5000 | Erro no circuito de diagnóstico | ||
| 5010 | P5S falha no fornecimento de energia | ||
| 5020 | Diagnóstico de CPU: Diagnóstico de configuração da porta | ||
| 5030 | Diagnóstico de CPU: Diagnóstico ROM | ||
| 5040 | Diagnóstico de CPU: diagnóstico de RAM | ||
| 5050 | Diagnóstico de CPU: monitor de sequência | ||
| ECL | Avaria na lógica de personalização | 0 | Erro de lógica de personalização |
| Err | Falha simulada | 9998 | Falha simulada |
| Ot | Erro de binário excessivo | 0 | Erro de binário excessivo |
| bbE | Erro de travagem mecânica | 11 | Erro BRAKE 1 |
| 12 | Erro BRAKE 2 | ||
| Eo | PT erro terminal | 0 | PT erro terminal |
| rbA | Erro de detecção de velocidade de salvamento | 0 | Erro de detecção de velocidade de salvamento |
| tCA | Chegada do interruptor de mudança de direcção | 0 | Chegada do interruptor de mudança de direcção |
| SCA | Erro de curto-circuito | 0 | Erro de curto-circuito |
| Lco | Erro de célula de carga | 0 | Erro de célula de carga |
| EF | Protecção do solo | 0 | Corrente trifásica Apenas FRN0060LM2A-4 <-> FRN0091LM2A-4 |
Em motores antigos a auto-regulação pode falhar: nestes casos a auto-regulação do tipo 1 (no ponto 10 seleccionar P04 = 1) pode ser executada mas neste caso os valores P06 e P12 devem ser introduzidos manualmente.

Os valores típicos de P06 situam-se entre 30% e 70% de P03.
 F.r. = Frequência nominal
F.r. = Frequência nominalS.s. = Velocidade síncrona
S.r. = Velocidade nominal
Os valores aceitáveis de P12 situam-se entre 0,5 e 5 Hz.
Por exemplo, para um motor de 4 pólos, a Frequência Nominal é de 50 Hz, a velocidade síncrona é de 1500 rpm e a Velocidade Nominal está na placa de identificação do motor (sempre em rotações por minuto).
motor GEARLESS
No caso de um problema "Erro 52 = er7 Erro VVVF" aparecerá no MENU ERRORS. Neste caso, verificar as ligações do codificador motor, limpar os erros no menu "Erros" e repetir o procedimento de poletuning a partir do ponto 14.
Após o procedimento de poletuning tentar mover o elevador em manutenção para cima e para baixo para algumas rotações motoras. Se se mover correctamente o procedimento termina, caso contrário, em caso de erro do VVVF (ere ou Ocx ou Os), inverter as duas fases do motor alterando o parâmetro H190 do VVVF, limpar os erros no menu "Falha" e repetir o procedimento de poletuning.
Instruções para actualização de software
FileName.PP2 ou .PP4
Inserir o dispositivo USB na ranhura, à espera da mensagem como na Figura 1.
 (Figura 1)
(Figura 1)Seleccione "Put a file into PlayPad" (por defeito), prima o botão OK. A janela muda para a Figura 2.
 (Figura 2)
(Figura 2)Siga as instruções no ecrã e seleccione o ficheiro .PP2/4 (no exemplo PLP2_2.PP2) e prima OK. A janela muda para a Figura 3
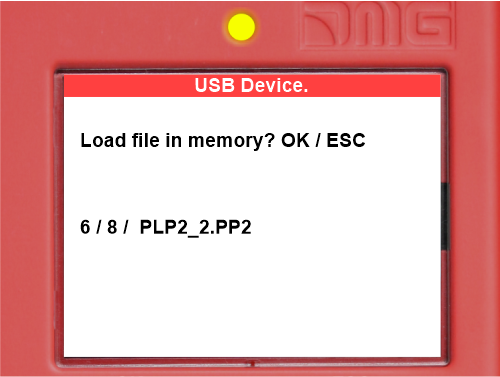 (Figura 3)
(Figura 3)Prima OK para confirmar o processo de actualização. A janela muda para a Figura 4
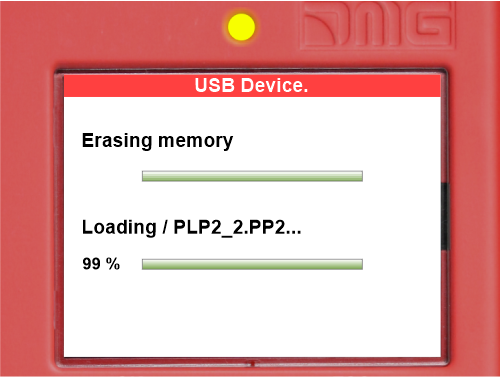 (Figura 4)
(Figura 4)No final do procedimento terá de remover o USB (Figura 5 ou Figura 6 aparecerão).
 (Figura 5)
(Figura 5) (Figura 6)
(Figura 6)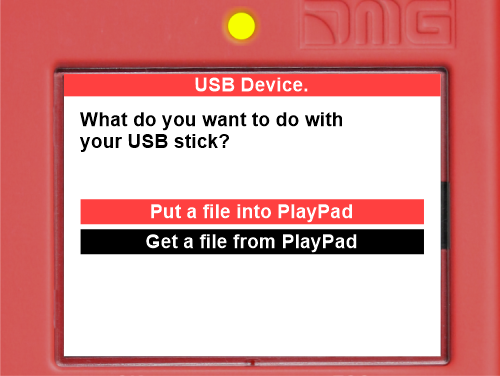 (Figura 7)
(Figura 7)A janela muda para a Figura 8.
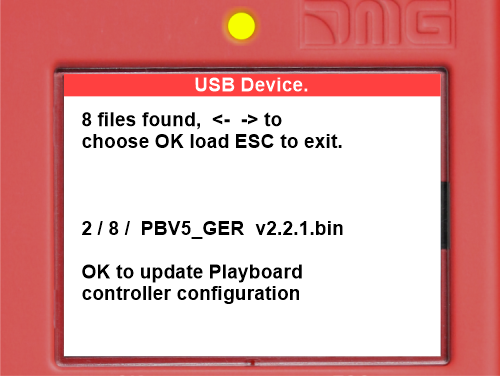 (Figura 8)
(Figura 8)Siga as instruções no ecrã e seleccione o ficheiro *.bin e prima OK. A janela muda para a Figura 9.
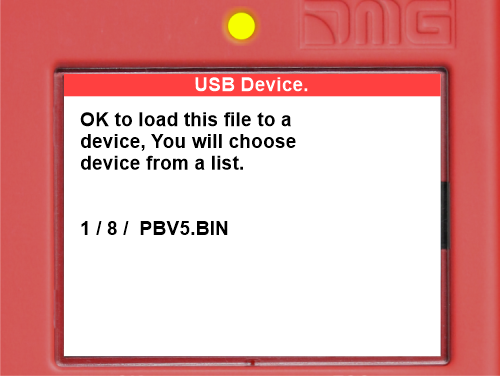 (Figura 9)
(Figura 9)Prima OK para confirmar o processo de actualização. A janela muda para a Figura 10, aguarde um pouco.
 (Figura 10)
(Figura 10)Seleccione o Dispositivo (ou grupo de dispositivos) para actualizar e prima OK (Figura 11)
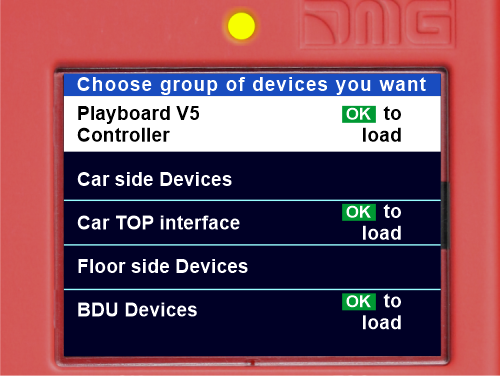 (Figura 11)
(Figura 11)A janela muda para a Figura 12: esperar até que o processo esteja concluído. Se precisar de premir qualquer botão de seta para ligar a retroiluminação.
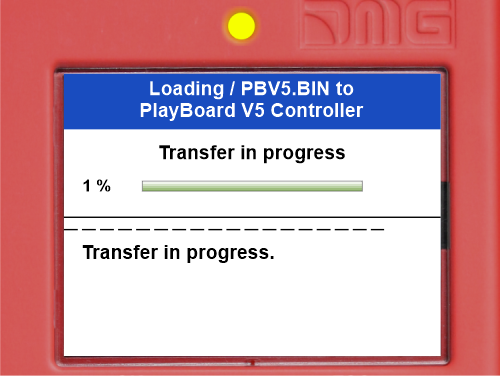 (Figura 12)
(Figura 12)Quando o processo terminar (Figura 13) prima o botão Esc até que a janela mostre "Por favor remover dispositivo USB" (Figura 14).
 (Figura 13)
(Figura 13) (Figura 14)
(Figura 14)| Dispositivo | Tempo necessário para actualizar o SW |
|---|---|
| Placa mãe (Controlador de Placa de Reprodução) | 3 minutos |
| PlayPad 4.0 | 1 minuto |
| Quadro TOC (Interface TOP Carro) | 1 minuto |
| Placa DMCPIT (Car COP Interface) | 1 minuto |
| Interfaces de Botões de pressão seriais (dispositivos BDU) | 30 segundos |
| Placas de expansão (PIT8 / 16RL / 16IO) | 30 segundos |
(Tabela III.1 - Calendário para actualização SW)






