

Bundkort
Kontrolkortet på Pitagora 4.0-systemet er baseret på 32-bit elektronisk teknologi og driver alle typer elektriske og hydrauliske lifte. Der kan tilføjes serielle og/eller parallelle tilslutninger til trykknappaneler (kabine og gulv). Det er især velegnet til VVVF elektriske installationer, også dem, der er udstyret med elevatorbil ukontrolleret bevægelsessystem (ændring A3 eller EN81-20 / 50).
- Op til 28 etager med seriel styring og op til 12 etager med parallel styring
- CAN Bus seriel linje til tilslutning af display og serielle betjeningspaneler
- CAN Bus seriel linje til seriel kommunikation med elevatorkabinen
- APB; Down Collective, Full Collective
- Multiplex (max. 6) systemstyring
- Alternativ eller selektiv dørstyring på gennemgående eller tilstødende adgangssystemer
- Styring af elevatorposition ved hjælp af magnetkontakter, inkrementel DMG-akselkoder, motor-enkoder eller ELGO LIMAX 33 CP absolut positioneringssystem
- Programmerings-/diagnoseinterface, indbygget og/eller fjernbetjening.
- Statusdiagnose, fejl, svigt og I/O-status
- Håndtering af VVVF-parametre og diagnose (kun FUJI FRENIC LIFT LM2)
- Avanceret styring af VVVF med hastighed, komfort og præcisionsstopstyring
- Softwareopgradering via USB-enhed
- RS232 seriel linje til PC og GPRS-modemforbindelse
- Kompatibilitet med alle DMG-produkter
- Kompatibilitet med alle +A3-løsninger til elektriske og hydrauliske systemer
- Beskyttelse af akseladgang (Uautoriseret akseladgang)
4.0-hovedkortet indeholder hardware og software, der gør det muligt at styre elevatoren og alle dens periferiudstyr. Gennem de integrerede og/eller fjernprogrammeringsmoduler giver det adgang til alle tilgængelige funktioner. Ind- og udgange er forbundet med alle elektroniske og elektromekaniske enheder i styringen og i elevatoren.
Mother Board har et aftageligt programmeringsmodul, der gør det muligt at se og redigere alle de grundlæggende parametre for styring og konfiguration af kontrolpanelet. I VVVF's version, også FUJI's parametre for de grundlæggende (menu VVVF BASE) og avancerede (VVVF ADVANCED menu) konfiguration kan ses og redigeres.
Nærmere oplysninger om programmeringsmodulets funktion og en omfattende styringssystemmenu findes i afsnittet om ændring af systemparametre.
Fjernprogrammeringsmodul
En alternativ måde at få adgang til controllerens konfigurationsmenu i visnings-/ændringstilstand er ved at forbinde det flytbare tastatur på DMG V3 Playboard (PlayPad) til stikket PLP V3, der er monteret på Lift Control Board.
Dette modul kan tilsluttes på forskellige måder:
- Direkte tilsluttet
- Tilsluttet via et dedikeret forlængerkabel direkte på boardet (i maskinrummet)
- Tilsluttes til tavlen på elevatorkabinens tag (TOC) i tilfælde af elevatorer med DMG-forudfortrådte serielle enheder.
En alternativ måde at få adgang til controlleren er baseret på Fusion App.

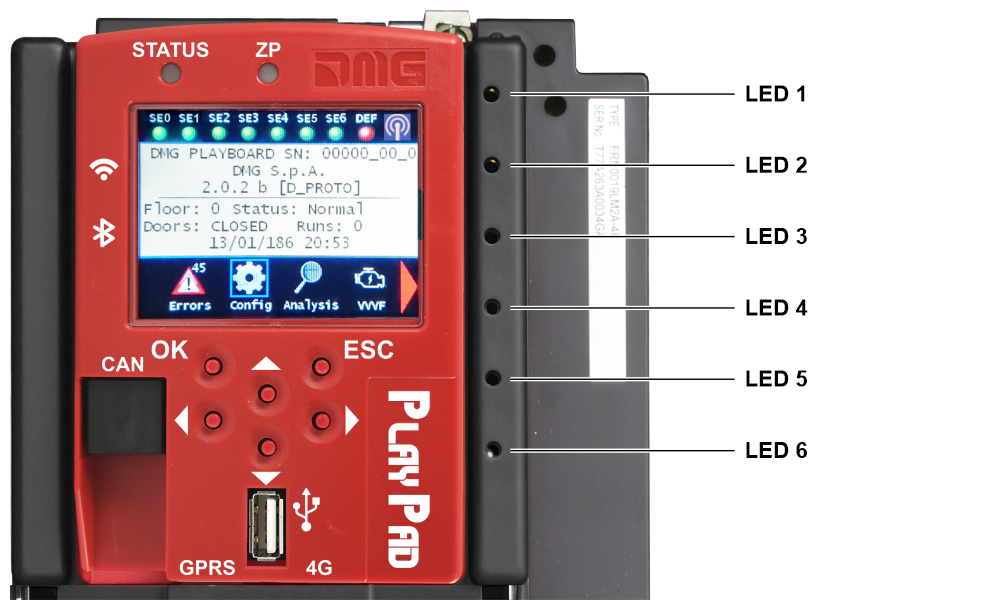
På mor bord er til stede 6 leds for en nem diagnostisk:
LED1 (grøn led)
CAN Multiplex-terminering aktiv: Led slukkes, når MULX-kortet er tilsluttet (terminering flyttes automatisk på MULX-kortet på den første og sidste multiplexcontroller).
LED2 (grøn led)
CAN Cabine-terminering aktiv: Led slukkes, når et valgfrit kort (PIT8 / 16IO / 16RL) er tilsluttet i styringen (terminering flyttes automatisk til det sidste valgfrie kort).
LED3 (RGB-led)
Farven på denne lysdiode giver oplysninger om liftens interne status i henhold til følgende tabel:
| Farve | Status |
|---|---|
| Led off | Systemet udfører nulstillingsproceduren |
| Grøn | Systemet er i normal driftstilstand |
| Gul | Systemet er i inspektionstilstand |
| Pink | Systemet er i midlertidig driftstilstand |
| Lilla | Systemet er ude af drift (parkering af kabine) |
| Cyan | Systemet kører i prioritetstilstand (LOP / CAR) |
| Rød | Systemet kører i brand-krigere mode |
| Hvid | Systemet udfører nødproceduren |
| Blå | Systemet udfører elevatoren bil drift kontrol procedure |
LED4 (gul led)
Led blinker, når kortet er i gang.
LED5 (grøn led)
Led on giver status for SE5-sikkerhedskæden
LED6 (rød led)
| Led Off | Ingen fejl aktiv |
| Led blinker | En (eller flere) aktive fejl |
| Led tændt | Låsning af fejl er aktiv |

| Navn | Beskrivelse | |
|---|---|---|
| FJ1 | FUJI-grænseflade | Forbindelse til FUJI-grænsefladen i inverteren. |
| J4 | FUJI Analog /Seriel | Tilslutning til fuji'en, der bruges i tilfælde af fjernomformer. |
| J6 | Parallelle signaler | Tilslutning til APPO's bestyrelse. Den omfatter alle parallelle signaler, der er tilgængelige på klemrække inde i kontrolpanelet. |
| J8 | UCM-kredsløb | Tilslutning til kredsløbet for UCM-løsningen. Pitagora 4.0 har egne certificerede løsninger til styring af UCM-løsningen i elevatorinstallationer. UCM-systemet består af tre dele: - Detektor, der registrerer en utilsigtet kabinebevægelse. - Aktuator, som gennemfører bremsningen. - Stopanordning, der stopper kabinen. Stopanordningen skal være en certificeret sikkerhedsanordning, og det er installatørens ansvar at sikre, at de forskellige elementer i UCM-systemet er kompatible. Til funktionskontrol af hele systemet og til måling af rum og indgrebstider er der fastsat særlige test, som skal udføres ved afslutningen af monteringen (se Test og målinger). For yderligere oplysninger om tilslutninger og parametre, se afsnittet om UCM-kredsløb). En ikke-udtømmende liste over de mest anvendte typer af UCM-systemer og løsninger er vist i nedenstående tabel, hvor forskellige anvendelige løsninger er fremhævet, som hver især har deres egen dedikerede grænseflade og programmeringskredsløb. Grænsefladen til de anførte enheder udføres i overensstemmelse med de specifikationer, der er angivet i de pågældende producenters manualer. Når det absolutte positioneringssystem ELGO LIMAX 33CP er til rådighed(link), anvendes dets certificerede UCM-funktion. Se tabellen "UCM-system" nedenfor |
| J9 | Relevelling-kredsløb | Kredsløb til at lave Bypass af dørsikkerhedskontakt til: - Foråbning og/eller - Nivellering I tilfælde af et absolut encoderpositioneringssystem anvendes dette stik ikke. Kredsløbet til styring af gennivelleringen består af et sikkerhedsmodul og et sikkerhedsrelæ. Dette kredsløb gør det muligt at omgå dørenes sikkerhedskontakter og dermed tillade bevægelse af kabinen med åbne døre med reduceret hastighed i det tilladte område (område med oplukkelige døre) i tilfælde af sænkning af elevatorkabinens niveau, ikke præcis standsning af elevatorkabinen eller foråbning af døre. ISO-udgangen lukkes til GND. - ISO-udgang (sikkerhedsrelækontakt for by-pass-døre) åben samler Max 24V 100mA - Indgang CCISO (overvåg ISO-sikkerhedsrelæ) lukker til GND (NC) I = 5mA - Indgang TISO (Overvågning af sikkerhedsmodul) lukning til GND (NC) I = 5mA - S11-S12 (fri kontakt) lukkes, når ISO1 er lukket Det andet aktiveringssignal til sikkerhedsmodulet kommer direkte fra en anden sensor (ISO2) og skal lukke til GND. |
| J10 | Light Curtain / >|< | Bruges kun i fuldstændig parallel konfiguration. Tilslutning til skrueterminalen i kabinettet. |
| J11 | Sikkerhedskæde | Tilslutning til SECU-bestyrelsen. Det omfatter de 7 point læsning fra sikkerhedskæden. Systemet er baseret på et optoisoleret kredsløb forbundet til jorden (Inside SEC Board): - Indgang SE0 <-> SE6 opto-isolerede 48 Vdc Over sikkerhedskredsløbet skal der være en magnetafbryder af passende størrelse (Imax = 0,5 A). - SE0 er startpunktet for sikkerhedskæden (efter DIS-beskyttelse i styringen) - SE1 styrer SHAFT STOP-zonen og PIT-inspektionsboksen - SE2 styrer top af elevatorkabine STOP og TOC-inspektionsboks - SE3 styrer grænsekontakter, sikkerhedsgear og overhastighedsregulator - SE4 styrer FLOOR PRELIMINARY LOCKS - SE5 styrer FLOOR LOCKS (gulvlås) - SE6 styrer karnapsdøre og kontaktsystemer med forudløste kontakter Hvis slutkontakten, hastighedsregulatoren eller sikkerhedsgearet aktiveres (sikkerhedskædepunkt SE3 åbnes), sættes systemet ud af drift. For at sætte det i drift igen skal du nulstille SE3-fejlen via programmeringsmodulet. Sikkerhedskontakten på slutgrænsekontakten for overkørsel skal naturligvis først nulstilles. |
| J12 | Multiplex CAN | Tilslutning til MULX-kortet. Den omfatter CAN-linjen til Multiplex-installationer. For yderligere oplysninger om tilslutninger og parametre henvises til BILAG I. |
| J13 | Bil på gulv | Signaludgang fra dørzonesensor til lyssignal på kabinettet. |
| J14 | Hydro, Kommando | Tilslutning til COIL-brættet. Det omfatter de bevægelige kommandoer til hydroinstallationer. Det kan også bruges i tilfælde af Remote Inverter installationer. |
| J15 | EN81-21 Kredsløb | Tilslutning til kredsløbet for at styre beskyttelsen i tilfælde af installation med mindre plads i PIT. Den omfatter styring af Bistabile kredsløb på døre og beskyttelsesanordninger (forudløst system eller manuel beskyttelse i gruben). For yderligere oplysninger om tilslutninger og parametre henvises til BILAG IX. |
| J16 | Placering af koder | Positioneringssystem baseret på en inkremental encoder: - DMG Shaft Encoder eller - motorenkoder (kun for VVVF Gearløs motorlift) I tilfælde af et positioneringssystem med absolut enkoder anvendes dette stik ikke. |
| J18 | Miljø Temperatur | Tilslutning til omgivelsestemperatursensoren. For at bruge funktionen til styring af omgivelsestemperaturen skal du bruge DMG-temperaturfølermodulet (kod. Q40.SND). Denne funktion stopper systemet, når temperaturen i motorrummet falder under minimumstemperaturen eller stiger over den maksimalt indstillede tærskelværdi. |
| J19 | PME-panel | Tilslutning til Kontrolpanel inde i kabinettet. |
| J20 | Ekstra output | Generisk output, der bruges til specielle funktioner. |
| J21 | Nødkredsløb | Kredsløb til komplet nød- eller evakuering med bremseåbning. |
| J22 | Motorrelæ | Tilslutning til relæet for motorkontaktorer (eller aktiver signaler i tilfælde af kontaktorløs installation). Det omfatter også hovedkontaktorernes skærminput. |
| J23 | Bremse relæ | Tilslutning til relæet til bremskontakter (eller ventiler i tilfælde af Hydro-installation). Den omfatter også bremskontaktorernes overvågningsindgang. |
| J25 | Test af batterier | Tilslutning til CHAR Board. Den indeholder signalerne til: - Lave batterier - Fasesekvens (kun Hydro) - Backup-tilstand |
| J26 | Valgfrit brædder | DMG Valgfrit bræt til: - Parallel fortrådte trykknapper (PIT8) - 16 relæudgange Board (16RL): Udvidelseskortet er især nødvendigt for at drive parallelle displays (1 Wire / Floor, 1 Wire / Segment, Gray Code, binær) som de direkte udgange til rådighed - 16 ind-/udgangskort (16IO) |
| M1 | Strømforsyning | Strømforsyning fra en kommerciel stabiliseret strømforsyning. Strømkredsenes og batteriopladerens minuspol skal være forbundet med jorden. Intern strømforsyning til uret: Superkondensator (autonomi på 5 dage uden strømforsyning). |
| UCM-system | |||
|---|---|---|---|
| Systemtype | Detektor | Aktuator | Stopanordning |
| Elektrisk lift. Ingen manøvrer med åbne døre. | Ikke påkrævet. (kun bremser' skærm) | ||
| Elektrisk lift. Manøvrerer med åbne døre. | Pitagora 4,0 | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Bremser (*) |
| Elektrisk lift. Manøvrerer med åbne døre med ELGO LIMAX 33CP | ELGO LIMAX 33CP | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Bremser (*) |
| Elektrisk lift. Overspeed regulator med anti-drift anordning (**) | Pitagora 4,0 | Strømafbrydelse af stikket. | Sikkerhedsudstyr |
| Elektrisk lift. Hastighedsregulator med anti-driftanordning (**) med ELGO LIMAX 33CP | ELGO LIMAX 33CP | Strømafbrydelse af stikket. | Sikkerhedsudstyr |
| Hydraulisk løft med dobbelt nedstigningsventil | Pitagora 4,0 | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Ventiler (***) |
| Hydraulisk lift med dobbelt nedløbsventil med ELGO LIMAX 33CP | ELGO LIMAX 33CP | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Ventiler (***) |
| Hydraulisk løft med elektronisk ventilstyring (certificeret kontrolenhed) | Pitagora 4,0 | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Ventiler (***) |
| Hydraulisk løft med elektronisk ventilstyring (certificeret kontrolenhed) med ELGO LIMAX 33CP | ELGO LIMAX 33CP | Afbrydelse af bremsekontrol (sikkerhedskæde åben) | Ventiler (***) |
(*) løsning, der udelukkende gælder for dobbeltbremser, der er certificeret som UCM-stopelement i henhold til EN81-20 5.6.7.3 og 5.6.7.4 (motorer uden gear eller motorer med gearkasse og bremse på langsom aksel).
(**) UCM-certificerede begrænsere med anti-driftstift (f.eks. Montanari RQxxx-A, PFB LKxxx med LSP-spole eller lignende anordninger).
(***) Ventiler i serie, der er certificeret som stopelement UCM i henhold til EN81-20 5.6.7.3 og 5.6.7.4
Programmeringsmenu og ændring af systemparametre
V3-skærmmenukort
| LIFT KONTROL BORD DMG S.p.A. | Sprog? Fransk, engelsk, portugisisk, italiensk, russisk, tysk, hollandsk ENTER: bekræft / ESC: afslut |
|
| ▲ ▼ | ▲ | |
| Kode? ** Adgangskode ** | ----- ANGIV ----> | Systemstatus |
| ▲ ▼ | ||
| Fejl | ||
| ▲ ▼ | ||
| I/O-status | ||
| ▲ ▼ | ||
| Konfiguration | ||
| ▲ ▼ | ||
| Døre | ||
| ▲ ▼ | ||
| Signaler | ||
| ▲ ▼ | ||
| Særlige funktioner | ||
| ▲ ▼ | ||
| Positionering | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Rec.Parameters | ||
| ▲ ▼ | ||
| Ur |
Menuen "Systemstatus"
Det er let tilgængeligt fra hovedvinduet på PlayPad ved at trykke på enter-tasten, når du først har indtastet den.
| Systemstatus | Beskrivelse | Visualisering på Seriel visning |
|---|---|---|
| Nulstille | Systemet udfører nulstillingsproceduren | O - |
| I brug | Systemet er i normal driftstilstand | |
| Inspektion | Systemet er i inspektionstilstand | ELLER |
| Temp. Operat | Systemet er i midlertidig driftstilstand | P |
| Ikke til nogen form for service | Systemet er ude af drift | |
| Bilens prioritet | Systemet kører i elevator bil prioritet tilstand (prioritet nøgle switch aktiveret) | |
| Brandmænd | Systemet fungerer i brandmandstilstand (forskellige operationer) | |
| Nødsituation | Systemet udfører nødproceduren | E |
| Styring af drift | Systemet udfører elevatoren bil drift kontrol procedure | |
| Opadgående drift | Systemet kører opad | |
| Nedadgående operation | Systemet kører nedad | |
| Udjævning på flere niveauer | Elevatorbilen er i gulvhøjde og er ved at nivellering | |
| Stadig på gulvet | Elevatorbilen er i gulvhøjde uden registrerede opkald | |
| Høj hastighed | Systemet kører i højhastighedstilstand | |
| Lav hastighed | Systemet kører i lavhastighedstilstand | |
| Dør tæt | Døren er helt lukket | |
| Døren er åben | Døren åbnes (eller åbnes/lukkes) | |
| Bilen er fuld last | Elevatorbilen er fuldt lastet | |
| Fotocelle A | Det input, der er relevant for fotocellindgangen A, er aktivt | |
| Fotocelle B | Det input, der er relevant for fotocellindgangen B, er aktivt | |
| BRA-knap | Det input, der er relevant for den åbne dørknap i indgang A, er aktivt | |
| BRB-knap | Det input, der er relevant for den åbne dørknap i indgang B, er aktivt |
Menuen "Fejl"
I denne menu vises de sidste 60 fejl, der er gemt i controllerens interne hukommelse. Alle fejl er beskrevet i afsnittet Fejlfinding.
ADVARSEL: I tilfælde af black out gemmes den interne hukommelse kun, hvis batteriet er tilsluttet.
| Etage 0 12:30:56 < Faults > | ----- ANGIV ----> | Etage 0 < Faults > Ingen fejl | ||
| ----- ANGIV ----> | Etage 0 < Faults > Fejl: 4 Vise? | ----- ANGIV ----> | < Faults > 3/4 43 = Inspektion Pos.: 0 # 1 Torsk. 0 17/03/09 10:10 * (se nedenfor for detaljer) |
|
| ▲ ▼ | ||||
| Nulstil alle registrerede fejl (tryk på ENTER for at bekræfte) BEMÆRK: Fejl slettes når liftkabinen stopper | Etage 0 < Faults > Fejl: 4 Nulstille? | |||
| ▲ ▼ | ||||
| Ryd den fundne fejl på grænseparameteren (tryk på ENTER for at bekræfte) BEMÆRK: Den faktiske annullering sker kun i hukommelsessystemet er stoppet | Etage 0 < Faults > Fejl: 4 Nulstil XXX? (se nedenstående tabel) | |||
| Fejl | Beskrivelse |
|---|---|
| Nulstil SE3 | Fejl ved begræns switch. Du kan først rydde den, når du har lukket sikkerhedskæden. |
| Nulstil 82212 | Styring af drift |
| Nulstil RSP | RSP-fejl; for reduceret pit og headroom. |
| Nulstil UCM | UCM-fejl; til A3-ændring |
| Nulstil ISO | ISO-fejl; problemdetektion i driftsovervågningen af sikkerhedsmodulet til avanceret døråbning/re-nivellering. |
| Nulstil SCS | SCS-fejl; installation 81-20. |
| Nulstil UAS | UAS-fejl; Speciel funktion. |
Menuen "I/O-status"
 | ----->>>>> |  | ----->>>>> | Etage 0 - 12:30:56 < I/O Status > |
| Feltet | Beskrivelse | Navigation | Værdier (gruppe på 12) | ||||
|---|---|---|---|---|---|---|---|
| Bil opkald | Simulering af en elevator bil opkald | ▲▼ (vælg etage) ENTER (bekræft) ESC (Afslut) | |||||
 Playboard IN-OUT | Systeminput/-output □ = Åbn kontaktperson ■ = Lukket kontakt | ▲▼ (ændringsgruppe) ENTER (Afslut) ESC (Afslut) | GRUPPER | ||||
| 1/9 | REM VHS LTMP | RØD TH1 LE | REV TH2 SUR | REV1 REV2 COM |
|||
| 2/9 | RMO Brk Rde | RGV RMV RPV | Mtr YBRK Ccf | Cco CCOB |
|||
| 3/9 | Bh Foa Roa | Cea Ffa Rfa | BRB Fob Rob | Ceb FFB Rfb |
|||
| 4/9 | Hs Bfr Otm | PCA | Pom RPH J20 | CPOM IEME OEME |
|||
| 5/9 | Flm Fld | BIP GNGM GNGD | 511B 511L | Dsa 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | Fai Zp | Fas TISO | Cam Iso | Agh Agb CISO |
|||
| 8/9 | REM REM1 REM2 | Rød RØD1 RØD2 | Pme OVS | Rev REV1 REV2 |
|||
| 9/9 | L-RØD L-GRØN Buzzer | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF IND-UD | VVVF-indgange/-output □ = Åbn kontaktperson ■ = Lukket kontakt | ▲▼ (ændringsgruppe) ENTER (Afslut) ESC (Afslut) | GRUPPER | ||||
| 1/8 | EN Fwd Rev | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 Rst | Y3 30 A/B/C | Y4 | |||
| 3/8 | Travl Acc December | Alm Int Brk | Ext NUV Rl | Tl Vl Il |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST --- | Fref = 0,00 Hz TRQ --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Koder 0 P/s --- kW HOVED = |
||||||
| 7/8 | Fejl VVVF 0 = --- 2 = --- | Fejl VVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 Trykknapper | Status for opkaldsknapper □ = Knappen er ikke aktiveret ■ = Knappen er aktiveret | ▲▼ (ændringsgruppe) ◄► (førerhus/ned/op) ENTER (Afslut) ESC (Afslut) | GRUPPER | ||||
| Kabine side A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Kabine side B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Trykknap ned ad side A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Trykknap ned ad side B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Opad side A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Opad side B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Kort AUX | Kort AUX-indgange/udgange □ = Åben kontakt ■ = Lukket kontakt | ▲▼ (Skift side) ENTER (Afslut) ESC (Afslut) | CARDS 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| KORT 16 IO UD | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| CARDS 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| BDU-indgange | BDU-indgange □ = Åben kontakt ■ = Lukket kontakt | ▲▼ (Skift side) ◄► (Skift gruppe) ENTER (Afslut) ESC (Afslut) | Gruppe: Dør, Brand, Nøgle 1, Nøgle 2, Nøgle 3, Nøgle 4. For hver gruppe vises kontaktens status for hver plan. |
||||
 Liste over opkaldsregistrering | Liste over opkaldsregistrering □ = Opkaldet er ikke registreret ■ = Opkald registreret | ▲▼ (ændringsgruppe) ◄► (førerhus/ned/op) ENTER (Afslut) ESC (Afslut) | Samme grupper som TRYKKNAPPER | ||||
| [0] Start = ... [1] Start = ... [2] Start = ... | Kør tællere [0] delvis (kan nulstilles) [1] I alt [2] Fremtidig brug | ◄► (Ændring) ENTER (nulstil og afslut) ESC (Afslut) | Den viste dato henvises til den sidste nulstilling af delvis tæller [0] | ||||
| Analog | Analoge foranstaltninger | ▲▼ (siden Skift) ESC (Afslut) | 24 V = strømforsyning VCAB = Kabinet og kabineabsorberinger VMR = BDU-absorberinger 24VB = Batteriernes spænding +5,0 V = Board intern strømforsyning TAMB = Sensor for omgivelsestemperatur PWM = Analogt hastighedsoutput |
||||
| Toc-foranstaltninger | Analoge foranstaltninger | ▲▼ (siden Skift) ESC (Afslut) | T_SHA = Akseltemperatur HOVED = TOC Strømforsyning COP_A = COP side A absorptioner COP_B = COP side B absorptioner |
||||
| COP-foranstaltninger | Analoge foranstaltninger | ▲▼ (siden Skift) ESC (Afslut) | MAIN_A = COP En strømforsyning MAIN_B = COP B strømforsyning T_CAR = Kabinetemperatur |
||||
| GULVE Linje | Bdu Kommunikationslinje | ENTER (nulstil) ESC (Afslut) | Fejl: Kommunikationsfejlnummer FER: Billedfejlfrekvens Dato og time for seneste nulstilling |
||||
| CAR Line | TOC / COP Kommunikationslinje | ENTER (nulstil) ESC (Afslut) | Fejl: Kommunikationsfejlnummer FER: Billedfejlfrekvens Dato og time for seneste nulstilling |
||||
| MTPX-linje | Multiplex Kommunikationslinje | ▲▼ (siden Skift) ENTER (nulstil) ESC (Afslut) | Fejl: Kommunikationsfejlnummer FER: Billedfejlfrekvens Dato og time for seneste nulstilling |
||||
| ELGO-model: | ELGO's diagnostiske | ||||||
Parametre til beskrivelse af PLAYBOARD IN-OUT-tabel
| Input | Beskrivelse |
|---|---|
| SE0 | Sikkerhedskæde Start |
| SE1 | Sikkerhedskæde pit sikkerhedskontakter |
| SE2 | Sikkerhedskæde toppen af elevator bil inspektion Box / Stop |
| SE3 | Sikkerhedskæde endelig grænsekontakt, sikkerhedsudstyr, hastighedsguvernør |
| SE4 | Sikkerhedskæde hal døre indledende kontakter |
| SE5 | Sikkerhedskæde hal døre inerlocks |
| SE6 | Kontaktdøre til parkeringskæder og forudløser (81-21) |
| Cco CCOB | styring af strømkontaktorer |
| CISO | Overvåg ISO-relæ |
| TISO | Sm1-styring af sikkerhedsmodul |
| LE | Nødlys (elevatorbil lysstrøm) |
| BFR | knap til lukning af dør |
| PCA | Elevator bil prioritet funktion |
| POM | Brandmænd operationer (Hall nøgle switch) |
| CPOM | Brandmænd operationer (Bil nøgle switch) |
| SUR (*) | Kontrol af overbelastning |
| COM | Fuld indlæsningskontrol |
| HS | funktion uden for tjeneste |
| ZP | signal til dørzone |
| RPH | Styring af fasesekvens |
| Rev REV1 REV2 | Inspektionsfunktion (maskinrum) Inspektionsfunktion (toppen af bilen) Inspektionsfunktion (PIT) |
| REM REM1 REM2 | Inspektion op (maskinrum) Inspektion op (Toppen af bilen) Inspektion op (PIT) |
| Rød RØD1 RØD2 | Inspektion ned (maskinrum) Inspektion ned (Toppen af bilen) Inspektion ned (PIT) |
| TH1 TH2 | Styring af motor (olie) temperatursensor |
| IEME | Nødsituation (strømsvigt) |
| PME | PME-vælger (nødevakuering) |
| Agh Agb | Top decelerationsswitch Bunddecelerationskontakt |
| Fas Fai | Positionssensorer (intet encoder-positioneringssystem) |
| E511 | Valgfri indgang til Akseladgang |
| BYPL BYPC | Dørens sikkerhed Bypass selector |
| BH | Knappen Åbn dør (indgang A) |
| CEA | Photocell indgang A |
| FOA | Indgang til døråbningskontakt A |
| FFA | Indgang til dørlukningskontakt A |
| BRB | Knappen Åbn dør (indgang B) |
| CEB | Photocell indgang B |
| FOB | Døråbningskontakt indgang B |
| FFB | Fine corsa chiusura (Porta B) |
| BR1 | Bremse 1 skærmkontakt |
| BR2 | Kontakt til bremse 2 skærm |
| IN_A IN_D | Overvåg UCM-kredsløb |
(*) Hvis der vises to signaler, er det første TOC'ens indgang, det andet er controllerens skrueterminal.
| Output | Beskrivelse |
|---|---|
| VHS | Output - ude af drift belysning |
| RMV | Output – mellemliggende hastighed, kommando |
| BRK | Udgang - Bremsekommando |
| MTR | Output - Motor, kommando |
| YBRK | Output - Bremsekommando (VVVF) |
| ISO | Output - Kommandoen Udjævning igen |
| RGV | Output - kommandoen høj hastighed |
| RPV | Output - kommandoen lav hastighed |
| RMO | Output - op rejse kommando |
| RDE | Output - ned rejse kommando |
| LTMP | Output - tidsbegrænset elevator bil lys kommando |
| CAM | Output - kommandoen Udgående rampe |
| OEM | Output - nødkommando |
| CCF | Udgang - Kortkredsløb i motorfasen |
| J20 | Output - programmerbar (stik J20) |
| DSA | Udgang - afaktivering af alarmer |
| 511B | Output - Norm 511 Buzzer |
| 511L | Output - Norm 511 Light |
| 212B | Output - Norm 212 Buzzer |
| FLD | Output - pil ned, kommando |
| FLM | Output - pil op, kommando |
| GNGD | Output - opadgående gong-kommando |
| GNGM | Output - nedadgående gong-kommando |
| BIP | Output – BIP-signalering i kabinen |
| PWR | Strømkommando for UCM-modul |
| ENAB | UCM-modul, der aktiverer kommando |
| ROA | Output - dør åben kommando (indgang A) |
| RFA | Output - dørlukningskommando (indgang A) |
| ROB | Output - dør åben kommando (indgang B) |
| RFB | Output - dørlukningskommando (indgang B) |
| L-RØD | Trafiklys signal 81-20/21 |
| L-GRØN | Trafiklys signal 81-20/21 |
| BUZZER | Buzzer signal til bypass 81-20 |
Parametre for VVVF IN-OUT-tabelbeskrivelse
| Signal | Beskrivelse |
|---|---|
| EN | Aktiver digital indgang (skrueterminal EN) |
| FWD | Opadgående digital indgang (skrueterminal FWD) |
| REV | Nedgående digital indgang (skrueterminal REV) |
| X1 | Digital indgang med høj hastighed (skrueterminal X1) |
| X2 | Digital indgang med REV-hastighed (skrueterminal X2) |
| X3 | Digital indgang med lav hastighed (skrueterminal X3) |
| X4 | Ingresso digitale (morsetto X4) |
| X5 | digitalt input (skrueterminal X4) |
| X6 | Ingresso digitale (morsetto X6) |
| X7 | Ingresso digitale (morsetto X7) |
| X8 | Digital nødindgang (skrueterminal X8) |
| 0,0 V | ANALOG VVVF-indgang (terminal 11-12) |
| Encoder | Encoder VVVF-indgang (lukket sløjfe) |
| VIGTIGSTE | VVVF firmware version |
| Y1 | Digitalt output (terminal Y1) |
| Y2 | Digitalt output (terminal Y2) |
| Y3 | Digitalt output (terminal Y3) |
| Y4 | Digitalt output (terminal Y4) |
| Y5A/C | Relæer til bremsekommandoer (terminal Y5) |
| 30 A/B/C | Relè (terminal 30 A/B/C) |
| ALM | Alarm VVVF-signalering |
| RST | Nulstil VVVF |
| ACC | Acceleration |
| DECEMBER | Deceleration |
| Fout | Outputfrekvens |
| Vout | Udgangsspænding |
| Iout | Afgangsstrøm |
| Imax | Maksimal udgangsstrøm |
Menuen "Konfiguration"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Configuration > |
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Midlertidige foranstaltninger | Systemets midlertidige driftsmåde | ◄► (Valg) | Nej, nej Ja | Nej |
| Test | For at lette kontrol og opstart af installation. For en beskrivelse henvises til bilag II. | |||
| Kode? | Adgangskodebeskyttelse for at få adgang til programmering | ◄► (Skift tegn) ▲▼ (markere tegn) | 8 tegn (0 - 9; A - Z; a - z ) | ingen adgangskode |
| Konfiguration | Konfiguration af ledningstyper: -) Standard trådterminaler (bil og gulve); -) Seriel kommunikation i elevatorbilen, 1 linje/gulv stik på gulve; -) Wireterminaler i elevatorbilen, Seriel kommunikation på gulve (BDU-moduler); -) Seriel kommunikation for elevator bil og gulve | ◄► (Valg) | Bil & Fl. STD; Bil SER. / Fl. RJ45; Bil STD. / Fl. BDU; Bil SER. / Fl. BDU | Bil SER / Fl. RJ45 |
| Kontroltype | Type betjeningsorgan for liften | ◄► (Valg) | -SAPB konstant tryk -Kabine med konstant tryk -SAPB; -SAPB record; -Ned kollektiv; -Fuldt kollektiv; | SAPB; |
| Kørsel | Trækkrafttype: -) Trækkraft VVVF -) Hydraulisk - Motor direkte (Dir): Kan også anvendes i tilfælde af VVF, der kun er aktiveret i opadgående retning. -) Hydraulisk - Motor Soft Starter (S-S): -) Hydraulisk - Motor Star Delta (Y-D): -) Hydraulisk - Motor med inverter (VVF): Motorkontaktorer aktiveret i op- og nedadgående retning. | ◄► (Valg) | Trækkraft Hydraulisk dir Hydraulisk S-S Hydraulisk Y-D Hydraulisk VVF | Trækkraft |
| Nej. af gulve | Antal etager i installationen | ▲▼ (forøg/formindsk) | 2 <-> 16 (std.) 2 <-> 32 (kun BDU) | 2 |
| Udjævning på flere niveauer | Ikke til stede: Ingen udjævning Type 1: (åben eller luk døren). Denne indstilling er angivet for trækinstallationer for god stopnøjagtighed. Re-nivellering udløses, når elevatoren bilen forlader sin position "perfekt på gulvet", det vil sige, når en af de to bjælker afbrudt. Re-nivellering slutter, når begge bjælker er gratis. ADVARSEL: Denne indstilling er ikke egnet til hydrauliske installationer på grund af risikoen for "pumpeeffekt" (elevatorbilen kører ned efter standsning) Type 2: (åben eller luk døren). Denne indstilling er angivet for hydrauliske installationer og fungerer som i type 1, bortset fra at de to bjælker skal afbrydes, inden udjævningsstarten påbegyndes. Re-nivellering slutter, når de to bjælker er gratis. ADVARSEL: Brug af sensorer med reduceret afstand mellem bjælker (TMS03 = 20 mm) foreslås. Type 3: Nivellering 1 stråle åben dør 2 bjælker lukket dør. Denne indstilling gør det muligt at nivellere 1 bjælke, gulvdør åben (elevatorbil lys på) og nivellering 2 bjælker, gulvdør lukket (elevator bil lys slukket). ADVARSEL: For at betjene nivelleringsdøren åben, uanset hvilken mulighed du har valgt, er det nødvendigt at undgå dørsikkerheden ved hjælp af et godkendt system. Bemærk: Med encoder-positioneringssystemet vises afstanden til aktivering af re-nivelleringen | ◄► (Valg) | Ikke til stede Type 1 Type 2 Type 3 | Ikke til stede |
| Stueetagen | Position af stueetagen (alle opkald under denne etage serveres kun opad (kun ned kollektiv) | ▲▼ (forøg/formindsk) | 0 <-> Gulv nr. | 0 |
| Fejltid med lav hastighed | Tid før aktivering af lavhastighedsfejlen (lav hastighed for lang) | ▲▼ (forøg/formindsk) | 7 s <-> 40 s | 7 s |
| Spilletid | Tid før aktivering af fejl i køretid | ▲▼ (forøg/formindsk) | 20 s <-> 45 s | 20 s |
| Opkald fra 16IO | Særlige funktioner til at bruge skrueterminal-interface med 16IO-kort i stedet for Prewired COP-kort (DMCPIT), når du har delvis modernisering. Interfacet kan bruges - på et enkelt kort på det første (16IO I-option) eller på det andet (16IO II-option) grænsefladekort, der styrer op til 12 etager - på to grænseflader (16IO I+II option), der styrer op til 28 etager. BEMÆRK: Denne mulighed er muligvis ikke kompatibel, hvis 16IO-kortet bruges til andre funktioner. | ◄► (Valg) | Deaktiveret; 16IO I; 16IO II; 16IO I+II; | Deaktiveret |
| Installationstype | Særlige funktioner til at bruge skrueterminal-interface med 16IO-kort i stedet for Prewired COP-kort (DMCPIT), når du har delvis modernisering. Interfacet kan bruges - på et enkelt kort på det første (16IO I-option) eller på det andet (16IO II-option) grænsefladekort, der styrer op til 12 etager - på to grænseflader (16IO I+II option), der styrer op til 28 etager. BEMÆRK: Denne mulighed er muligvis ikke kompatibel, hvis 16IO-kortet bruges til andre funktioner. | ◄► (Valg) | Simplex; Multiplex; Multiplex LIGHT | Simplex |
| Multiplex-konfiguration | Multiplex-konfiguration: LN); trykknaplinje (PBL); etager i multiplex; forskydning. For en beskrivelse henvises til Multiplex-løsninger. | ◄► (vælg parameter) ▲▼ (Skift værdi) | - Lift Nr. (LN).: 1<->4 - Trykknaplinje (PBL): 0(1 linje)<->3(4 Linjer) | (LN). (PBL): 1.0 |
| - Gulve: 2 <-> 16 [32] - Afste 0 <-> Antal etager | Flrs. : 2 Af de første : 0 |
|||
| Multiplex Kalder | I multiplexinstallationer kan et gulvopkald differentieres med et langt trykknaptryk (mere end 3 sekunder) kaldet: a) Installationen med lavere "Lift No (LN)" parameter (f.eks. hvis der er en duplex-installation med en stor kabine til handicappede passagerer og en mindre, skal jo større skal indstilles som "1" og den anden som "2"; b) I et "asymmetrisk gulvfordelingssystem" er det anlæg, der kan nå det laveste/højeste niveau. | ◄► (Valg) | Nej (0, 1, 2, 3) Ja (0, 1, 2, 3) | Nej |
Menuen "Døre"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Doors > |
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Ret. rampe på | Tid før aktivering af den afgående rampe | ▲▼ (forøg/formindsk) | 0,1 s <-> 9,9 s | 0,1 s |
| Ret. rampe slukket | Tid før deaktivering af den afgående rampe | ▲▼ (forøg/formindsk) | 0,1 s <-> 9,9 s | 0,1 s |
| Lås fejltid | Tid før aktivering af låsefejlen | ▲▼ (forøg/formindsk) | 2 s <-> 60 s | 15 s |
| Dør åben forsinkelse | Tid før døråbning – til automatisk dør | ▲▼ (forøg/formindsk) | 0,1 s <-> 9,9 s | 0,5 s |
| Parkeringstid med åben dør | Elevator parkeringstid med åben dør (i sek.) | ▲▼ (forøg/formindsk) | 1 s <-> 30 s | 7 s |
| Lukketid med opkald | Tid (i sek.), før døren lukkes i tilfælde af registrerede opkald | ▲▼ (forøg/formindsk) | 1 s <-> 60 s | 2 s |
| Døre Nb. | Antal døre og -type | ◄► (markering) | -1 dør - 2 døre simult. - 2 døre sel. -2 døre sel+ igennem | 1 adgang |
| Skriv dør A | Valg af dørtype til indgang A: 1) Manuel / Ikke til stede: manuelle døre på gulve, elevator bildøre manuel eller ikke til stede; 2) Biluafhængig: manuelle døre på gulve, elevatorbildøre uafhængige; 3) Bil automatisk: manuelle døre på gulve, elevator bildøre automatisk; 4) Kombineret auto: automatiske døre i elevatoren bilen og på gulve | ◄► (markering) | Manuel / ikke til stede; Bil uafhængig; Bil automatisk; Kombineret automatisk | Kombineret automatisk |
| Dør A med grænsekontakt | Tilstedeværelse af en grænsekontakt for dør A (ikke til stede for manuelle og uafhængige døre) | ◄► (markering) | Nej, det gør jeg ikke; Ja (NO) Ja (NC) | Nej |
| Vælg dør A på gulvet | Konfiguration af dør A for hver etage: sæt adgang til hver etage og åben eller luk dørparkering på gulvet (for automatiske døre) | ◄► (markering) ▲▼ (skift gulv) | Nej, nej Pkg. Dør tæt på; Pkg. Døren er åben | Pkg. Dør tæt på; |
| Dør A Åben/Luk tid | Dør A uden begrænsningskontakt: døråbnings-/lukketid | ▲▼ (forøg/formindsk) | 1 s <-> 60 s | 10 s |
| Dør En startforsinkelse | Dør En manual: tid før start | ▲▼ (forøg/formindsk) | 0,1 s <-> 9,9 s | 2,0 s |
| Glidende dør A | Dør A med grænsekontakt: tid før glidefejl | ▲▼ (forøg/formindsk) | 1 s <-> 60 s | 10 s |
| Dør A drevet | Dør A drevet under kørslen. Ikke taget i betragtning til manuelle eller uafhængige døre | ◄► (markering) | Nej Ja Ja AT40 | Nej |
| Type Dør B | Valg af dørtype til indgang B (se type dør A): | ◄► (markering) | Manuel / ikke til stede; Bil uafhængig; Bil automatisk; Kombineret automatisk | Kombineret automatisk |
| Dør B med grænsekontakt | Tilstedeværelse af en grænsekontakt for dør A (ikke til stede for manuelle og uafhængige døre) | ◄► (markering) | Nej, nej Ja | Nej |
| Vælg dør B på gulvet | Konfiguration af dør A for hver etage: sæt adgang til hver etage og åben eller luk dørparkering på gulvet (for automatiske døre) | ◄► (markering) ▲▼ (skift gulv) | Nej, nej Pkg. Dør tæt på; Pkg. Døren er åben | Pkg. Dør tæt |
| Dør B Åbent/Luk tid | Dør B uden begrænsningskontakt: døråbnings-/lukketid | ▲▼ (forøg/formindsk) | 1 s <-> 60 s | 10 s |
| Dør B startforsinkelse | Dør B manual: tid før start | ▲▼ (forøg/formindsk) | 0,1 s <-> 9,9 s | 2,0 s |
| Glidende dør B | Dør B med grænsekontakt: tid før glidefejl | ▲▼ (forøg/formindsk) | 1 s <-> 60 s | 10 s |
| Dør B drevet | Dør B drevet under kørslen. Ikke taget i betragtning til manuelle eller uafhængige døre | ◄► (markering) | Nej Ja Ja AT40 | Nej |
| Avanceret åbning | Parameter for avanceret åbning af døre (åbning starter før elevatorbilstop). | ◄► (markering) | Nej, nej Ja | Nej |
| Fotocelletype | Parameter til valg af fotocelletype: INGEN fotocelle: Kontakten åbnes, hvis strålen er fri. Kontakten lukkes, hvis strålen afbrydes. Stød, fotocelle og åbne dørkontakter skal være forbundet parallelt. NC photocell: modsat NO photocell. Stød, fotocelle og åbne dørkontakter skal være forbundet i serie. BEMÆRK: Stød, fotocelle og åbne dørkontakter skal alle være af samme art (NO eller NC) | ◄► (markering) | NEJ, Nc | Nej |
| Dørkontakttid | Ventetid før start af en tur (for gammel dørs sikkerhedskontakt) | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,1 s |
Menuen "Signaler"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Signals > |
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Bilens prioritet | Tidspunkt for elevatorbil på gulvet uden retning, før du tager landing opkald. I tilfælde af kombinerede automatiske døre starter timingen, når dørene er lukket, og stød, fotocelle og genåbningskontakter ikke er aktiveret | ▲▼ (forøg/formindsk) | 2 s <-> 30 s | 10 s |
| Registrering af opkald på gulv | Indstille blink for gulvknapper ved registrering | ◄► (markering) | Permanent; Inddækning ved gulve | Permanent |
| AUX-udgang | Valg af udgangstype på de 16 relækort. BEMÆRK: Konfigurationer med 1 ledning/gulv og 1 ledning/gulv HYD er kun tilgængelige på det første 16RL-kort. Efter de to AUX-kortkonfigurationer kan der indstilles udgange på BDU (OUT-1 og OUT-2). | ◄► (markering) ▲▼ (Skift værdi) | 1 ledning pr. etage; Bil på gulvet; Gulvlys; Grå indikator; 9 segm. indikator; Elevatoren er på vej. 1 ledning per etage HYD | 1 ledning pr. etage |
| BDU-indgange Type 0 = Vogn på gulvet og ude af drift Type 1 = Pile Type 2 = Bil på gulvet og Bil på vej Type 3 = 3 Wire Display | Type 0 Type 1 Type 2 Type 3 | Type 0 | ||
| Automatisk gulvbetegnelse | Automatisk indstilling af numeriske tegn for serielle positionsindikatorer. Værdien øges/formindskes automatisk ved hver etage fra nederste etage | ▲▼ (forøg/formindsk) | -9 <-> 30 | Laveste fl.: 0 |
| Manuel gulvbetegnelse | Manuel indstilling af alfanumeriske tegn for serielle positionsindikatorer. Der skal indstilles for hver etage | ◄► (markering) ▲▼ (Skift værdi) | - ; 0 <-> 9 ; A <-> Z | |
| Udløser på nv | Det er muligt at starte udløser (talesyntese / næste retning pile) på deceleration punkt (Ja) eller til gulvet ankomst (Nej). | ◄► (markering) | Nej Ja | Nej |
| Pile i næste retning | I tilfælde af parameteraktivering aktiveres pileoutput kun, når liften standser ved gulvet (eller ved opbremsning, hvis udløserparameteren på nv er aktiv). | ◄► (Valg) | Nej Ja | Nej |
| Ltmp-forsinkelse | Denne funktion håndterer forsinkelsen mellem et opkald fra en gulv-/elevatorbil og lyset, der tændes. Outputtet deaktiveres XX sekunder efter, at opkaldet er blevet forkyndt. 0 sek. betyder ingen timer aktiv (lys TIL) | ▲▼ (forøg/formindsk) | 0 s <-> 240 s | 1 sek. |
| EME-forsinkelse | Denne funktion håndterer forsinkelsen mellem IEME (Black Out Signal) og outputkommandoen (OEME), før systemet skifter i automatisk nødprocedure. | ▲▼ (forøg/formindsk) | 0 s <-> 30 s | 0 sek. |
| Buzzer 81-21 | Til 81-21 installation: Brug 81-20's akustiske buzzer (bypass dør) på toppen af elevatorbilen som akustisk alarm, når beskyttelsen ikke er i aktiv position. | ◄► (Valg) | Nej Ja | Nej |
Menuen "Særlige funktioner"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Special Features > |
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Nulstil i | Kørselsretning under nulstillingsproceduren | ◄► (markering) | 2 s <-> 30 s | 10 s |
| Rejsegrænser under inspektion | Gælder kun for FAI/FAS-positioneringssystem. Indstillinger for rejsegrænserne under inspektionstilstand. Hvis rejsen er programmeret ud over grænserne, tillader controlleren ingen bevægelse ud over øverste / nederste etager. | ◄► (markering) | Op til AGB/AGH; Ud over AGB/AGH | Op til AGB/AGH |
| Brandmænd | (Se procedure for programmering af branddrift) Type af brandvæsenoperationer (hvis de er til stede) og relevante parametre (brandvæsenets adgangsniveau og side, POM- og CPOM-nøglekontakttype); valg af relevant gældende norm: -) Norm NF P82-207 (Frankrig); -) EN 81-72 (a): ingen nøglekontakt til elevatorkabine FF; -) EN 81-72 (b): med elevatorkabine FF-nøglekontakt; | ◄► (feltet Vælg) ▲▼ (Skift værdi) | Ikke til stede; NF P82-207; EN 81-72 (a); EN 81-72 (b) EN 81-73 DM 15/09/2005 (IT) | Ikke til stede |
| Brand afsløring | Parameter for branddetektion på gulve. Når der opdages brand: - hvis elevatoren befinder sig på en anden etage end den, hvor der blev opdaget brand, annulleres alle registrerede opkald fra/til denne etage - Hvis elevatoren er på det gulv, hvor der blev opdaget brand, blokerer controlleren døråbningen, lukker døre (hvis den er åben ved branddetektering) og sender elevatorbilen til et sikkert gulv | ◄► (markering) | Nej, nej Ja | Nej |
| Registrering af stopknap | Systemet registrerer tilstanden uden for drift (tryk på STOP-knappen). Det er også muligt at indstille forsinkelsen for at undgå samtidig bevægelse i installationer, der drives med en generator. | ◄► (markering) | Nej, nej Ja | Nej |
| EN 81-20 | Systemindstilling i henhold til EN 81-20 | ◄► (markering) | Nej, nej Ja | Nej |
| Fejl mod gener | Parameter til påvisning af fejl i forbindelse med gener mod gener (antal stop uden fotocelleaktivering, hvorefter alle opkald til elevatorbiler annulleres) | ◄► (markering) ▲▼ (ingen opkald) | Nej, nej Ja 2 <-> 10 | Nej 3 |
| Ud af servicegulvet | Gulv til ude af drift. Parkeringsgulv, når HS-indgang er aktiveret. | ▲▼ (forøg/formindsk) | 0 <-> Gulv nr.: | 0 |
| Automatisk returnering | Parametre for elevator elevator bil automatisk retur på gulvet: Retur gulv og minimum ventetid før automatisk returnering | ◄► (vælg parameter) ▲▼ (Skift værdi) | Nej 0 <-> Gulv nr.: 1 min. <-> 60 min. | Nej 0 15 min. |
| Returzoner | Avancerede indstillinger for returnering på gulvet på planlagte tidspunkter/dage: -) Dag (0 = hverdag, 1 = mandag ... 7 = søndag); -) Valgt tidsinterval (4 interval hver dag); -) Retur gulv; -) Starttidspunkt; -) Sluttidspunkt (maks. tid: 7 timer og 45 min); | ◄► (vælg parameter) ▲▼ (Skift værdi) | ||
| R. zone timing | Tidsindstilling for valgte returzoner | ◄► (markering) ▲▼ (Skift værdi) | Nej, nej Ja 1 s <-> 120 s | Nej 60 s |
| Sletning af opkald på gulvet | Sletning af alle opkald på gulvet, hvor elevatorbilen stopper, uden kontrol over retningen (kun for komplette kollektive installationer) | ◄► (markering) | Nej, nej Ja | Nej |
| Driftskontrol (FR) | Driftskontrol (Frankrig) | ◄► (markering) | Ikke til stede; Trækkraft; Tromlemaskine | Ingen |
| Trykknapkode | Det giver dig mulighed for at programmere en 4-cifret kode til elevator bil opkald. Der kan tildeles en 4-cifret kode til hver BCx-elevatorbilknapindgang, der svarer til elevatorbilens trykknapindgange. Eksempel: Hvis BC0-trykknappen er knyttet til 0123-koden, kan du for at reservere etage 0 fra Kabinen: a) hold trykket på gulvet 0 trykknap i 3 sekunder. b) Alle COP-trykknap blinker c) Tryk i rækkefølge på de trykknapper, der svarer til BC0, BC1, BC2, BC3; Bemærk: Angiv en kode mellem 0 og 9, der svarer til input BC0 ÷ BC9 Programmering Code "0" vil gøre det muligt for den særlige funktion Pent House | ◄► (feltet Vælg) ▲▼ (Skift værdi) | ||
| Kontrol Temperatur omgivende | Kontroller temperaturen i maskinrummet gennem sensoren (hvis den er til stede). Hvis temperaturen overstiger de indstillede tærskler i mere end 30 sekunder, stopper systemet ved gulvet, og fejlen registreres. Styringen er kun aktiv under normal drift eller kabineprioritet. Når du har indstillet de to tærskler, kan du trykke på Enter for at udføre sensorkalibreringen (tryk straks på Enter for at bevare den aktuelle kalibrering, ellers skal du indstille rumtemperaturværdien og derefter trykke på Enter). Den første tærskel kan indstilles mellem -10 ° C og +5 ° C, mens den anden tærskel kan indstilles mellem +40 ° C og +75 ° C. | ◄► (feltet Vælg) ▲▼ (Skift værdi) | Without; +5°C <=> +40°C | Uden |
| Automatisk Opkald | Når liften er i normal tilstand, kan "Automatiske opkald" aktiveres for at udføre et bestemt opkaldsnummer (op til 120 opkald eller ubegrænset) i trin på et minut. Det er dog muligt at aktivere dørfunktionaliteten eller ej (systemet vil også fortsætte med at acceptere gulvopkald, der simulerer programmerede opkald, hvis det er aktiveret). Funktionen slutter automatisk, når maskinerne er slukket, eller hvis systemet sættes i inspektionstilstand. | ▲▼ (forøg/formindsk ◄► (Vælg døre) | 0 <-> 120 ∞ 10 <-> 60 s Ja - Nej | 0 60s Ja, det er det |
| Skærm-UCM | A3-ændringsforslag. Konfigurer skærmtype. For beskrivelse henvises til UCM-kredsløb. | ▲▼ (forøg/formindsk ◄► (Valg) | ||
| UCM | Installationstype 81-1 / 81-20 / 81-21 Procedure for adgang til akslen og beskyttelse. For beskrivelse henvises til UCM-kredsløb. | ▲▼ (forøg/formindsk ◄► (Valg) | ||
| Tvungen stop | Hvis den er programmeret, stopper installationen ved et bestemt gulv ved hver krydsning (nogle hoteller bruger denne funktion). | ▲▼ (forøg/formindsk ◄► (Valg) | ||
| Beskyt gulv | Hvis et beskyttet gulv er programmeret, når elevatorbilen når gulvet, åbner døren ikke, i stedet viser skærmen billeder, der kommer fra kameraet, der svarer til den pågældende etage. Døre kan kun åbnes ved at trykke på knappen ÅBN DØR. Hvis dette ikke sker, flyttes elevatoren til forrige etage og stopper derefter den beskyttede gulvtilstand (denne driftstilstand er kun mulig med DMG's overvågningssystem). | ▲▼ (forøg/formindsk ◄► (Valg) | ||
| Lop-prioritet | Aktivering af opkaldsfunktionen for gulvprioritet. parring med 16 IN-kort (eller nøgleindgange fra BDU) | ◄► (Valg) | Nej, nej Ja | Nej |
| Aktiver gulv | Aktivering af funktionen til aktivering af opkald (f.eks. KORTlæser). I kombination med 16 IN-kort. Type 1: LOP enable: For at aktivere opkald skal det tilsvarende input på 16 IN-kortet lukkes. Type 2: COP-aktivering For at muliggøre opkald skal det tilsvarende input på 16 IN-kortet lukkes Type 3: Aktiver COP + LOP: For at muliggøre opkald skal den tilsvarende indgang på 16 IN-kortet lukkes (deaktivering af gulvet) | ▲▼ (forøg/formindsk ◄► (Valg) | Nej, det er Type 1 Type 2 Type 3 | Nej |
| Beskyttelse af skakter | Beskyttelse af rum og døre. For en beskrivelse henvises til akselbeskyttelse. | ▲▼ (forøg/formindsk | Nej, det er Type 1 Type 2 Type 3 Type 4 | Nej |
| Integreret vejning af last | Aktiver funktion for integreret lastvejning. Det er obligatorisk med en kalibreringsprocedure(Test 22) | ◄► (Vælg felt) | Nej, nej Ja | Nej |
Menuen "Systemplacering"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Positioning > |
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Positioneringssystem | Type positioneringssystem: med Encoder eller traditionel. Kan kun ændres i Midlertidig oper. Tilstand Bemærk: I tilfælde af absolutte Encoder- og aksellængder, der er længere end 65 meter, skal opløsningen af Encoder = 2 ændres i menuen til automatisk nulstilling, før du starter den manuelle undervisningsprocedure. | ◄► (markering) | FAI/FAS **; FAI/FAS ** ingen AGH Encoder med uret; Encoder mod uret Encoder ELGO | FAI/FAS **. |
| Top PV | Decelerationsposition (passage i lav hastighed) og antal indgange | ▲▼ (forøg/formindsk) | 2 <-> 6 | 5 |
| Solcelleanlæg på gulve | Placering af den specifikke deceleration for hver etage | ◄► (Top PV) ▲▼ (Gulvvalg) | Kort etage eller 2<->6 0 <-> Nej. Gulvet | 5 alle etager |
| Forsinkelse på kort niveau | Tid før kortniveau deceleration (kun hvis et kort niveau er programmeret) | ▲▼ (forøg/formindsk) | 0,00 s <-> 2,50 s | 0,00s |
| Top PV 2 Forsinkelse | Forsinkelse før passage til mellemliggende hastighed | ▲▼ (forøg/formindsk) | 0,00 s <-> 2,50 s | 0,00s |
| Forsinkelse Dir.-BRK | VVVF: Forsinkelse mellem aktivering af kørselsretning og kørselskommando (BRK) | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Andet |
| OLEO: Stjerne / Delta forsinkelse | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,5 s – VVVF 0,5 s – Stjerne/Delta 0,0 s - Andet |
|
| Forsinkelse BRK-S | Forsinkelse mellem aktivering af BRK-kommando og hastighedskommando | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,00 s |
| Forsink BRK-Dir. | Forsinkelse mellem deaktivering af løbekommando og deaktivering af rejseretning (ankomme al piano) | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Andet |
| Inspektionshastighed | Indstiller hastigheden af rejsen i inspektion | ◄► (markering) | Lav hastighed; Høj hastighed | Lav hastighed |
| Nød-BRK tændt | Modulationsparameter for nødpause (ændres kun, hvis EME-tavlen ikke er til stede) | ▲▼ (forøg/formindsk) | 0,0 s <-> 5,0 s | 0,0s |
| Nød-BRK slukket | Modulationsparameter for nødpause (ændres kun, hvis EME-tavlen ikke er til stede) | ▲▼ (forøg/formindsk) | 0,0 s <-> 5,0 s | 0,0s |
Tabel over parametre: (Encoder positioneringssystem):
| Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|
| Positioneringssystem | Type positioneringssystem: med Encoder eller traditionel. Bemærk: Kan kun ændres i Temporary Oper. Tilstand | ◄► (markering) | Encoder med uret; Encoder mod uret Encoder ELGO | Koder med uret |
| Automatisk nulstilling | Start af selvlæringsprocedure for gulvposition. Kan kun ændres i midlertidig handlingstilstand. | ◄► (markering) | Nej, nej Ja | Nej |
| Placering af gulv | Positionsværdi for hver etage | ▲▼ (forøg/formindsk) ◄► (markering) | ||
| Accel. Tid | Accelerationstid. Tid, der kræves for at skifte fra starthastighed til kørehastighed. | ▲▼ (forøg/formindsk) | 1,0 s <-> 5,0 s | 3,0 s |
| Start af boost | Starthastighed | ▲▼ (forøg/formindsk) | 0 s <-> 10 s | 3 % |
| Stop Boost | Endelig hastighed (standsning) | ▲▼ (forøg/formindsk) | 0 s <-> 10 s | 4 % |
| Maks. | Maksimal hastighed under rejsen | ▲▼ (forøg/formindsk) | 5 s <-> 100 s | 100 % |
| Inspektionshastighed | Kørehastighed i inspektionstilstand | ▲▼ (forøg/formindsk) | 5 s <-> 100 s | 50 % |
| AGB/AGH-hastighed | Rejsehastighed på AGB/AGH-grænsepunkter. Samme hastighed vedtaget under nødoperationer | ▲▼ (forøg/formindsk) | 1 s <-> 15 s | 10 % |
| Forsinkelse Dir.-BRK | VVVF: Forsinkelse mellem aktivering af kørselsretning og BRK-kommando (start) | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Andet |
| OLEO: Stjerne / Delta forsinkelse | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,5 s – VVVF 0,5 s – Stjerne/Delta 0,0 s - Andet |
|
| Forsinkelse BRK-S | Forsinkelse mellem aktivering af BRK-kommando og begyndelsen af den analoge hastighedsrampe | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Andet |
| Forsink BRK-Dir. | Forsinkelse mellem deaktivering af kørselskommando og deaktivering af køreretning (stop ved gulvet) | ▲▼ (forøg/formindsk) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Andet |
| Nød-BRK tændt | Parameter for modulation af nødpause | ▲▼ (forøg/formindsk) | 0,0 s <-> 5,0 s | 0,0s |
| Nød-BRK slukket | Parameter for modulation af nødpause | ▲▼ (forøg/formindsk) | 0,0 s <-> 5,0 s | 0,0s |
| Skærmkoder | Indeholder oplysninger om: Koderfunktioner, aflæsning af bremsehøjder (R1D / R1S), re-nivellering (RRIPD / RRIPS) og stop af kabinen (RLD / RLS), hvor D angiver ned, mens S betyder op; endelig indeholder info om læsning AGB / AGH og ZP højder. Bemærk: R1D- og R1S-højder kan ændres ved at skubbe Enter uden at gentage selvlæringsproceduren (for at lade den langsommere afstand være lige i stigning og nedstigning). | |||
| Dørzone | Længde af dørzone ZP i mm |
BEMÆRK: Se tidsdiagrammet i slutningen af denne vejledning for bedre at forstå nogle parameter betydninger.
Menuen "VVVF"
Denne menu er kun tilgængelig, når en FUJI FRENIC LIFT VVVF er tilsluttet et kontrolløftekort.
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < VVVF > |
| Torsk. | Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|---|
| F03 | Maksimal hastighed | Motorens maksimale hastighed | ◄► (markering) ▲▼ (Skift værdi) | 150-3600 OMDR./MIN. | 1500 RPM |
| F05 | Nominel spænding | Motorens nominelle spænding drevet af inverteren | ◄► (markering) ▲▼ (Skift værdi) | 80-240 V (for serier i klasse 200 V) | 230 V |
| 160-500 V (for serier i 400 V-klassen) | 380 V | ||||
| F07 | Konto T1 | Accelerationsrampe (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-99,9 s | 1,8 s |
| F08 | Dec T2 | Accelerationsrampe (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-99,9 s | 1,8 s |
| F42 | Kontroltilstand | Kontroltilstand | ◄► (markering) ▲▼ (Skift værdi) | 0-1-2 | 0 (Geardrev, lukket kredsløb) 1 (gearløse drev, lukket kredsløb) 2 (drev med gear, åben sløjfe) |
| E12 | Acc/dec T5 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E15 | Konto/dec T8 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (markering) ▲▼ (Skift værdi) | 0.00 - 99.9 s | 1,8 s | |
| C07 | Krybehastighed | Krybehastighed (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 4,0 Hz (Geardrev, åben sløjfe) 2,5 Hz (tandhjulstræk, lukket kredsløb) 1,5 Hz (gearløse drev, lukket kredsløb) |
|
| C10 | Mellemhastighed | Systemhastighed under inspektionstilstand (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 25 Hz (gearede drev) 10 Hz (gearløse drev) |
|
| C11 | Høj hastighed | Høj hastighed ved ændring af multistep-hastighed (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 50 Hz (drev med gear) 20 Hz (gearløse drev) |
|
| P01 | Motorpæle | Antal poler på motoren | ◄► (markering) ▲▼ (Skift værdi) | Se motorplade | 4 (Gearede drev) 20 (gearløse drev) |
| P02 | Motorklassificeret hætte | Motorens nominelle effekt | ◄► (markering) ▲▼ (Skift værdi) | Se motorplade | Funktion af inverterstørrelse |
| P03 | Motorvurderet kurve | Motorens nominelle strømintensitet | ◄► (markering) ▲▼ (Skift værdi) | Se motorplade | Funktion af inverterstørrelse |
| P04 | Motor Autotuning | Automatisk justering af motorparametre (kun gearede drev) | ◄► (markering) ▲▼ (Skift værdi) | 0 (2 til at udløse den automatiske indstillingsprocedure for gearede drev) | |
| P06 | M-No-Load Curr. | Motorstrøm uden belastning | ◄► (markering) ▲▼ (Skift værdi) | Indstillet af motor Autotuning (Geardrevne drev) 0 A (gearløse drev) |
|
| P12 | M-klassificeret slip | Motorens nominelle slipfrekvens | ◄► (markering) ▲▼ (Skift værdi) | 0-15 Hz | Indstillet af motor Autotuning |
| L01 (*) | PG vælge | Se VVVF Frenic lift indstilling | ◄► (markering) ▲▼ (Skift værdi) | 0-5 | 0 (gearede drev) 4 (Gearløse drev med EnDat-encoder) 5 (Gearløse drev med sin-cos Encoder) |
| L02 (*) | PG-opløsning | Opløsning af pulskoderen (Puls/ Drej) | ◄► (markering) ▲▼ (Skift værdi) | 360-60000 P/R | 1024 (Gearede drev) 2048 (gearløse drev) |
| L19 | S-Kurve 1 | S-kurve – 1 | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L24 | S-kurve 6 | S-kurve – 6 | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L25 | S-Kurve 7 | S-kurve – 7 | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L26 | S-kurve 8 | S-kurve – 8 | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L27 | S-kurve 9 | S-kurve – 9 | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L82 | Bremse ved forsinkelse | Forsinkelse fra aktivering af BRKS-output | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10,00 S | 0,20 s |
| L83 | Bremse forsinkelse | Forsinkelse fra deaktivering af BRKS-output | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10,00 S | 0,10 s |
(*) - Ikke tilgængelig på LM2C-invertere.
| Torsk. | Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|---|
| F01 | Hastighed, kommando | Valg af kommando til hastighedsvariation | ◄► (markering) ▲▼ (Skift værdi) | 0=MULTISPEED 1=NR Analog (ingen polariseret) ingen tilgængelige | 0 (med FAI/FAS-positioneringssystem) 1 (med Encoder-positioneringssystemer) |
| F03 | Maksimal hastighed | Motorens maksimale hastighed | ◄► (markering) ▲▼ (Skift værdi) | 150-3600 OMDR./MIN. | 1500 RPM |
| F04 | Nominel hastighed | Motorens nominelle hastighed (frekvens) | ◄► (markering) ▲▼ (Skift værdi) | 50 Hz | |
| F05 | Nominel spænding | Motorens nominelle spænding drevet af inverteren | ◄► (markering) ▲▼ (Skift værdi) | 80-240 V (for serier i klasse 200 V) | 230 V |
| 160-500 V (for serier i 400 V-klassen) | 380 V | ||||
| F07 | Konto T1 | Accelerationsrampe (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-99,9 s | 1,8 s |
| F08 | Dec T2 | Decelerationsrampe (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-99,9 s | 1,8 s |
| F09 | TRQ Boost | Drejningsmoment stigning | ◄► (markering) ▲▼ (Skift værdi) | 0,0-5,0 | 0,0 (op til 7,5 kW og fra 30 kW) 0,3 (fra 11 kW til 22 kW) |
| F10 | Elektronisk OL | Overbelastning af elektrisk beskyttelse | ◄► (markering) ▲▼ (Skift værdi) | 1 - 2 | 2 |
| F11 | Overbelastningsniveau | Elektronisk termisk overbelastningsbeskyttelse til motor (Værdi i Ampere lig med inverterstørrelsen) | ◄► (markering) ▲▼ (Skift værdi) | 1 til 200% af den nominelle strøm | 100 % |
| F12 | Overbelastningstid | Termisk tidskonstant | ◄► (markering) ▲▼ (Skift værdi) | 0,5 – 75,0 min. | 0,5 |
| F20 | DC Bremsehastighed | Frekvenstærskel for DC INJECTION | ◄► (markering) ▲▼ (Skift værdi) | 0,2 Hz (åben sløjfe) 0,0 Hz (lukket kredsløb) |
|
| F21 | DC Bremseniveau | Støtteintensitetstærskel for DC INJECTION | ◄► (markering) ▲▼ (Skift værdi) | 50 % (åben sløjfe) 0 % (lukket kredsløb) |
|
| F22 | DC bremse T | DC-INJEKTIONSTID | ◄► (markering) ▲▼ (Skift værdi) | 1,0 s (åben sløjfe) 0,0 s (lukket kredsløb) |
|
| F23 | Starthastighed | Starthastighed (i Hz) for inverteren | ◄► (markering) ▲▼ (Skift værdi) | 0,00-150 | 0,50 Hz (åben sløjfe) 0,00 Hz (lukket kredsløb) |
| F24 | Ventetid | Holde tiden for at køre med starthastighed for inverteren | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10 s | 0,8 s (FAI/FAS) 0,2 s (Encoder) |
| F25 | Stophastighed | Stophastighed (i Hz) for inverteren | ◄► (markering) ▲▼ (Skift værdi) | 0,0 Hz (FAI/FAS) 0,1 Hz (koder) |
|
| F26 | Motorlyd | Bærefrekvens | ◄► (markering) ▲▼ (Skift værdi) | 15 kHz | |
| F42 | Kontroltilstand | Kontroltilstand | ◄► (markering) ▲▼ (Skift værdi) | 0-1-2 | 0 (Geardrev, lukket kredsløb) 1 (Gearløse drev, lukket kredsløb) 2 (drev med gear, åben sløjfe) |
| F44 | Aktuel begrænser | Aktiveringsniveau for strømbegrænseren. % til inverterens nominelle strøm. Hvis "Auto", betyder værdien ingen strømbegrænsning. | ◄► (markering) ▲▼ (Skift værdi) | 100% <-> 230% eller Auto | 200 % |
| E04 | Kommando X4 | Input X4 bruges ikke | ◄► (markering) ▲▼ (Skift værdi) | 25 | |
| E05 | Kommando X5 | Input X5 bruges ikke | ◄► (markering) ▲▼ (Skift værdi) | 25 | |
| E06 | Kommando X6 | Input X6 bruges ikke | ◄► (markering) ▲▼ (Skift værdi) | 25 | |
| E07 | Kommando X7 | Input X7 bruges ikke | ◄► (markering) ▲▼ (Skift værdi) | 25 | |
| E08 | Kommando X8 | Input X8 bruges ikke | ◄► (markering) ▲▼ (Skift værdi) | 63 | |
| E10 | Konto/dec T3 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E11 | Acc/dec T4 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E12 | Acc/dec T5 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E14 | Konto/dec T7 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E15 | Konto/dec T8 | ◄► (markering) ▲▼ (Skift værdi) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (markering) ▲▼ (Skift værdi) | 0,00 -99,9 s | 1,8 s | |
| E20 | Signal Y1 | Output Y1 (transistor) anvendes ikke | ◄► (markering) ▲▼ (Skift værdi) | 27 | |
| E21 | Signal Y2 | Output Y2 (transistor) anvendes ikke | ◄► (markering) ▲▼ (Skift værdi) | 27 | |
| E22 | Signal Y3 | Output Y3 (transistor) anvendes ikke | ◄► (markering) ▲▼ (Skift værdi) | 27 | |
| E23 | Signal Y4 | Output Y4 (transistor) anvendes ikke | ◄► (markering) ▲▼ (Skift værdi) | 25 | |
| E30 | Hastighed Arr. Hyst | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | 0,48 Hz (Gearet motor) 0,1 Hz (Gearløs motor) |
|
| E31 | Hastighed Det.Lev | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | 48,33Hz | |
| E32 | Hastighed Det Hyst | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | 0,48 Hz (Gearet motor) 0,1 Hz (Gearløs motor) |
|
| E39 | RRD-niveau | Anbefalet retning i nødstilfælde (bruges ikke) | ◄► (markering) ▲▼ (Skift værdi) | 0% | |
| E61 | Analogt input 12 | Funktion af analogt input 12 | ◄► (markering) ▲▼ (Skift værdi) | 0-2 | 1 |
| E98 | Kommando FWD | Funktion til skrueterminal FWD | ◄► (markering) ▲▼ (Skift værdi) | 98 | |
| E99 | Kommando REV | Funktion til skrueterminal REV | ◄► (markering) ▲▼ (Skift værdi) | 99 |
| Torsk. | Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Begrænsning af drejningsmoment i nødstilfælde. Hvis "OFF", betyder værdien ingen strømbegrænsning. | ◄► (markering) ▲▼ (Skift værdi) | 0% <-> 100% eller OFF | 0 |
| C02 | BATRY TL T | ◄► (markering) ▲▼ (Skift værdi) | 0,0 s | ||
| C03 | Batterihastighed | Hastighed under nødkørsel | ◄► (markering) ▲▼ (Skift værdi) | 1,50 Hz | |
| C07 | Krybehastighed | Krybende hastighed (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 4,0 Hz (Geardrev, åben sløjfe) 2,5 Hz (tandhjulstræk, lukket kredsløb) 1,5 Hz (gearløse drev, lukket kredsløb) |
|
| C10 | Mellemhastighed | Systemhastighed under inspektionstilstand (kun med FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 25 Hz (gearede drev) 10 Hz (gearløse drev) |
|
| C11 | Høj hastighed | Høj hastighed for ændring af multistep-hastighed (FAI/FAS-positioneringssystem) | ◄► (markering) ▲▼ (Skift værdi) | 50 Hz (drev med gear) 20 Hz (gearløse drev) |
|
| P01 | Motorpæle | Antal poler på motoren | ◄► (markering) ▲▼ (Skift værdi) | (se motorplade) | 4 (Gearede drev) 20 (gearløse drev) |
| P02 | Motorklassificeret hætte | Motorens nominelle effekt | ◄► (markering) ▲▼ (Skift værdi) | (se motorplade) | Funktion af inverterens størrelse |
| P03 | Motorvurderet kurve | Motorens nominelle strømintensitet | ◄► (markering) ▲▼ (Skift værdi) | (se motorplade) | Funktion af inverterens størrelse |
| P04 | Motor Autotuning | Automatisk justering af motorparametre (kun gearede drev) | ◄► (markering) ▲▼ (Skift værdi) | 0 (2 til at udløse den automatiske indstillingsprocedure for gearede drev) | |
| P06 | M-No-Load Curr. | Motorstrøm uden belastning | ◄► (markering) ▲▼ (Skift værdi) | Indstillet af motor Autotuning (Geardrevne drev) 0 A (gearløse drev) |
|
| P07 | M-%R1 | Motor (%R1) | ◄► (markering) ▲▼ (Skift værdi) | Indstillet af motor Autotuning (Geardrevne drev) 5 % (gearløse drev) |
|
| P08 | M-%X | Motor (%X) | ◄► (markering) ▲▼ (Skift værdi) | Indstillet af motor Autotuning (Geardrevne drev) 10 % (gearløse drev) |
|
| P09 | M-Slip kørsel | Slip kompensation gevinst i procent til den nominelle slip (P12) på kørselssiderne | 0,0 - 200% | Indstillet af motor Autotuning | |
| P10 | M-Slip bremsning | Slipkompensation i procent til den nominelle slip (P12) ved bremsesiderne | ◄► (markering) ▲▼ (Skift værdi) | 0,0 - 200% | Indstillet af motor Autotuning |
| P11 | M-Slip T | Tidsværdi for slipkompensation (fast) | ◄► (markering) ▲▼ (Skift værdi) | 0,2 s | |
| P12 | M-klassificeret slip | Motorens nominelle slipfrekvens | ◄► (markering) ▲▼ (Skift værdi) | 0 - 15 Hz | Indstillet af motor Autotuning |
| P60 | Modstand i ankeret - Rs | ◄► (markering) ▲▼ (Skift værdi) | Ohm | I henhold til Motor MX***-tabellen | |
| P62 | Reaktans på ankerets q-akse - Xs | ◄► (markering) ▲▼ (Skift værdi) | Ohm | I henhold til Motor MX***-tabellen | |
| P63 | Induktiv spænding mellem faserne - E | ◄► (markering) ▲▼ (Skift værdi) | V | I henhold til Motor MX***-tabellen | |
| P65 | q-aksens induktans magnetisk mætningskorrektion | ◄► (markering) ▲▼ (Skift værdi) | % | I henhold til Motor MX***-tabellen | |
| H04 | Automatisk nulstilling af klokkeslæt | Automatisk nulstilling (antal gange) | ◄► (markering) ▲▼ (Skift værdi) | 10 | |
| H05 | Automatisk nulstilling af int | Nulstilling automatisk (nulstil interval) | ◄► (markering) ▲▼ (Skift værdi) | 5 s | |
| H06 | Køleventilator CTRL | Forsinkelse ved slukning af køleventilator (Auto-værdi betyder, at der ikke er nogen grænse for ventilatorstyring; ventilatoren er altid tændt) | ◄► (markering) ▲▼ (Skift værdi) | 0 min. <-> 100 min. eller Auto | 5 min. |
| H57 | S-Kurve 11 | Kurve til S-11 | ◄► (markering) ▲▼ (Skift værdi) | 0 - 50% | 20% |
| H58 | S-Kurve 12 | Kurve til S-12 | ◄► (markering) ▲▼ (Skift værdi) | 0 - 50% | 20% |
| H64 | Nul ventetid | ◄► (markering) ▲▼ (Skift værdi) | 0,0 s (med FAI/FAS-positioneringssystem) 0,8 s (med Encoder-positioneringssystemer) |
||
| H65 | Blødt starttidspunkt | ◄► (markering) ▲▼ (Skift værdi) | 0,0 s (med FAI/FAS-positioneringssystem) 0,0 s (med Encoder-positioneringssystemer) |
||
| H67 | Stop ventetid | ◄► (markering) ▲▼ (Skift værdi) | 0,00 s (åben sløjfe) 1,00 s (lukket kredsløb) |
||
| H96 | Bremseskærm | Aktiver bremseskærm | ◄► (markering) ▲▼ (Skift værdi) | 0-1 | 0 |
| H190 | Motor UVW-ordre | Sequenza fasi uscita motore | ◄► (markering) ▲▼ (Skift værdi) | 0-1 | 1 |
| Torsk. | Parameter | Beskrivelse | Navigation | Værdier | Standardværdien |
|---|---|---|---|---|---|
| L01 (*) | PG vælge | Se VVVF Frenic lift indstilling | ◄► (markering) ▲▼ (Skift værdi) | 0-5 | 0 (gearede drev) 4 (Gearløse drev med EnDat-encoder) 5 (Gearløse drev med sin-cos Encoder) |
| L02 (*) | PG-opløsning | Opløsning af pulskoderen (Puls/ Drej) | ◄► (markering) ▲▼ (Skift værdi) | 360-60000 P/R | 1024 (Gearede drev) 2048 (gearløse drev) |
| L03 (*) | P.P.Tuning | Se VVVF Frenic lift indstilling | ◄► (markering) ▲▼ (Skift værdi) | ||
| L04 (*) | P.P.Forskydning | Magnetisk stangpositionsforskydning (forskydningsvinkel) til gearløse drev | ◄► (markering) ▲▼ (Skift værdi) | Indstilles automatisk under indstilling af pole position (L03) | |
| L05 (*) | ACR P gevinst | ◄► (markering) ▲▼ (Skift værdi) | 1,5 | ||
| L07 (*) | Automatisk valg af polindstilling | ◄► (markering) ▲▼ (Skift værdi) | I henhold til Motor MX***-tabellen | ||
| L19 | S-Kurve 1 | L19 til L28 angiver S-kurvezoner, der skal anvendes på operationer, der drives af kommandoer med multistep-hastighed med S-kurveacceleration/deceleration. | ◄► (markering) ▲▼ (Skift værdi) | 20 % (gearede drev) 25 % (gearløse drev) |
|
| L20 | S-kurve2 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L21 | S-kurve 3 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L22 | S-kurve 4 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L23 | S-Kurve 5 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L24 | S-kurve 6 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L25 | S-Kurve 7 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L26 | S-kurve 8 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L27 | S-kurve 9 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L28 | S-Kurve 10 | 20 % (gearede drev) 25 % (gearløse drev) |
|||
| L29 | SFO Hold T | Betjening af kort gulv (holdetid) Bruges kun til FAI-FAS-positioneringstilstand | ◄► (markering) ▲▼ (Skift værdi) | 0,00s. <-> 10,00s. eller OFF | UD |
| L30 | SFO-hastighed | Kort gulvdrift (tilladt hastighed) – BRUGES IKKE | ◄► (markering) ▲▼ (Skift værdi) | 0,00 s | |
| L33 | Overhastighedstid | Elevator-parameter | ◄► (markering) ▲▼ (Skift værdi) | 0,000s <-> 0,500 s | 0,000 s |
| L36 (*) | ASR P Gain Høj | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 10,00 (gearede drev) 2,50 (gearløse drev) |
|
| L37 (*) | ASR I Gain Høj | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 0,100 | |
| L38 (*) | ASR P Gain Lav | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 10,00 (gearede drev) 2,50 (gearløse drev) |
|
| L39 (*) | ASR I Gain Lav | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 0,100 | |
| L40 (*) | Skift hastighed 1 | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | 5,00 (gearede drev) 1,00 (gearløse drev) |
|
| L41 (*) | Skift hastighed 2 | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | 10,00 (gearede drev) 2,00 (gearløse drev) |
|
| L42 (*) | ASR-FF Gevinst | ◄► (markering) ▲▼ (Skift værdi) | 0.000 - 10.000 s | 0.000 s | |
| L55 (*) | TB-starttidspunkt | ◄► (markering) ▲▼ (Skift værdi) | 0.00 - 1.00 s | 0.20 s | |
| L56 (*) | TB Sluttidspunkt | ◄► (markering) ▲▼ (Skift værdi) | 0.00 - 20.00 s | 0.20 s | |
| L64 (*) | TB Digital 3 | ◄► (markering) ▲▼ (Skift værdi) | -200 - +200 % | 0 % | |
| L65 (*) | ULC-handling | Kompensation for ubalanceret belastning | ◄► (markering) ▲▼ (Skift værdi) | 0-1 | 1 |
| L66 (*) | ULC-aktivering | Kompensation for ubalanceret belastning (aktiveringstid) | ◄► (markering) ▲▼ (Skift værdi) | 0,01-2 s | 2,00 s |
| L68 (*) | ULC ASR P gevinst | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 10 (FAI/FAS) 10 (Koder) |
|
| L69 (*) | ULC ASR Jeg vinder | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 0,01 (FAI/FAS) 0,01 (Koder) |
|
| L73 (*) | ÅOP P gevinst nul | Se Kontrol af tilbagerulning og kørekomfort | ◄► (markering) ▲▼ (Skift værdi) | 0 (FAI/FAS) 0 (Koder) |
|
| L74 (*) | Apr D Gevinst | ◄► (markering) ▲▼ (Skift værdi) | 0.0 | ||
| L75 (*) | Filtrer klokkeslæt | ◄► (markering) ▲▼ (Skift værdi) | 0.000 s | ||
| L76 (*) | ACR P konstant | ◄► (markering) ▲▼ (Skift værdi) | 0.00 | ||
| L80 | Bremsetilstand | Udgangstilstand for bremsestyring (BRKS) | ◄► (markering) ▲▼ (Skift værdi) | 1-2 | 1 |
| L81 | Bremse på niveau | Udgangsstrøm, der aktiverer BRKS-signalet, når L80 = 2. | ◄► (markering) ▲▼ (Skift værdi) | 0,-200% af motorens no-load strøm | 100 % |
| L82 | Bremse på forsinkelse | Forsinkelse fra aktivering af BRKS-output | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10,00 Sek. | 0,20 s |
| L83 | Bremse forsinkelse | Forsinkelse fra deaktivering af BRKS-output | ◄► (markering) ▲▼ (Skift værdi) | 0,00-100 Sek. | 0,10 s |
| L84 | BRKS check t | Tilladt tid mellem BRKS-udgang og BRKE-indgang (Er6) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10 sek. | 0,00 s |
| L99 | HANDLING SEL | Ikke brugt | ◄► (markering) ▲▼ (Skift værdi) | ||
| L122 | Del. Op. indgangseffekt Det. niveau | ◄► (markering) ▲▼ (Skift værdi) | % | ||
| L124 | Del. Op. dir. Calc. Delay Timer | ◄► (markering) ▲▼ (Skift værdi) | s. | ||
| L130 | Skivens diameter (Ds) | ◄► (markering) ▲▼ (Skift værdi) | mm | I henhold til Motor MX***-tabellen | |
| L131 | Encoderens diameter (Ds) | ◄► (markering) ▲▼ (Skift værdi) | mm | I henhold til Motor MX***-tabellen | |
| L132 | Theta-kompensationsbånd | ◄► (markering) ▲▼ (Skift værdi) | Deg | I henhold til Motor MX***-tabellen | |
| L133 | Theta-kompensationsforstærkning nedre begrænser | ◄► (markering) ▲▼ (Skift værdi) | I henhold til Motor MX***-tabellen | ||
| L134 | Tilbageslag tid | Tilbageslag tid (Når L65 = 2) | ◄► (markering) ▲▼ (Skift værdi) | 0,00-10,00 s | 0 |
| L198 | Op. sæt kontakt 1 | BIT0 = Det er muligt at fastgøre bærefrekvensen til 16 kHz for hele hastighedsområdet for at reducere kørestøjen. | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L199 | Op. sæt kontakt 2 | reserveret. | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L209 (*) | Antal ST-bits | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0-25 | 13 |
| L212 (*) | Alarm/advarselsbit (SSI) | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L213 (*) | Antal AL1-bits | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L214 (*) | Antal AL2-bits | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L215 (*) | Antal CRC-bits | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0 | |
| L216 (*) | CRC-polynomium | Kun for BiSS-, SSI- eller Hyperface-enkoder (se VVVF Frenic lift-indstilling) | ◄► (markering) ▲▼ (Skift værdi) | 0 |
(*) - Ikke tilgængelig på LM2C-invertere.
BEMÆRK: Se venligst tidsdiagrammet for bedre at forstå nogle betydningsparametre.
Menuen "Rec-parametre"
Bemærk: Datalagring er ikke kun påkrævet til emulering af PBV3-controllere.
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Rec Parameters > |
| Etage 0 12:30:56 < Rec Parameters > | ----- ANGIV ----> | Etage 0 12:30:56 < Rec Parameters > Gem parametre | ----- ENTER ----> <----- ESC ------ | Etage 0 12:30:56 < Rec Parameters > Gem parametre Er du sikker? |
| ▲ ▼ | Indtast ↓ |
|||
| Etage 0 12:30:56 < Rec Parameters > Gem parametre Afslut reg. |
||||
| Etage 0Gulv 0 12:30:56 < Rec Parameters > Nulstil parametre | ----- ENTER ----> <----- ESC ------ | Etage 0Gulv 0 12:30:56 < Rec Parameters > Nulstil parametre Er du sikker? |
||
| Indtast ↓ |
||||
| Etage 0Gulv 0 12:30:56 < Rec Parameters > Nulstil parametre Afslut reg. |
||||
Menuen "Ur"
| ----->>>>> | | ----->>>>> | Etage 0 - 12:30:56 < Clock > |
- Da = Dag
- Mo = Måned
- År = År
- D = Ugedag (1=Man)
- Hr = Timer
- Mn = Minutter

ADVARSEL: I tilfælde af systemlukning spares tiden ved hjælp af en superkondensator (i op til 5 dage uden strømforsyning).
VVVF Frenic Lift Indstilling
– Justeringsprocedure –
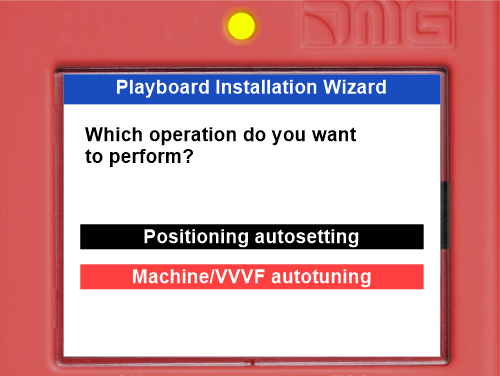
Vælg "Menuen Installation"

På skærmen vises:

Bekræft ved at trykke på OK og vælg "Maskine / VVVF Autotuning:
Indsæt den ønskede parameter, og gå videre til den næste ved at trykke på højre pil.
Listen over VVVF-parametre er:
| Parameter | Beskrivelse | Gearløs motor | Gearet motor |
|---|---|---|---|
| P01 - Motor poler | Indsæt motorpolens nummer | X | X |
| F03 – Maksimal hastighed | Indsæt maksimal motorhastighed [RPM] (motorplade) | X | X |
| F04 – Klassificeret aktuel | Indsæt nominel motorhastighed [Hz] (Motorplade) | X | X |
| F05 – Nominel spænding | Indsæt nominel motorspænding [V] (Motorplade) | X | X |
| P08 – M-%X | Indsæt værdi 10 % | X | |
| P07 – M-%R1 | Indsæt værdi 5 % | X | |
| P06 – M-No Load Curr. | Indsæt værdi 0 [A] | X | |
| P03 – Motorvurderet strøm | Indsæt den nominelle strøm [A] (Motorplade) | X | |
| P02 – Motorklassificeret hætte | Indsæt nominel effekt [kW] (Motorplade) | X | |
| C11 – Høj hastighed | Indsæt høj hastighed [Hz] (Motorplade) | X | |
| C10 – Mellemhastighed | Indsæt mellemhastighed [Hz] (Inspektionshastighed) | X | |
| C07 – Krybehastighed | Indsæt lav hastighed [Hz] (10% af C11) | X | |
| L01 – VÆLG PG | Angiv motorisk kodertype: (VVVF-valgfrie brædder) | X | X (*) |
| L02 – PG-opløsning | Indsæt motorkoderopløsning | X | X (*) |
(*) Kun lukket sløjfe
Den sidste parameter er forskellig i henhold til MotorType:
GEARLØS motor:
 Vælg 4 : Statisk justering
Vælg 4 : Statisk justeringVælg 5 : Dynamisk tuning (kun hvis den er fri for reb)
Gearet motor:
 Vælg 3
Vælg 3I tilfælde af problemer skal du gå til menuen Fejl for at identificere problemet (§ Motorjusteringsfejl)
I slutningen af proceduren skal du trykke på op/ned-knappen og kontrollere den korrekte retning for bevægelse af elevatorbilen. hvis ikke korrekt, invertere værdier af parametrene E98 og E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Specifikationer for enkoder | Encoderkort | Motor | |
| A/B-outputkanal | Absolut signal | |||
| 0 | Åben kollektor / Push-Pull | = | OPC-PG3 | IM |
| Line Driver | = | OPC-PMPG | ||
| 1 | Åben kollektor / Push-Pull | Z | OPC-PG3 | IM OG PMSM |
| 4 | Sinusdifferentielt (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS eller OPC-PSH | PMSM |
| 5 | Sinusdifferentielt (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Sinusdifferentielt (1Vpp) | BISS-C (Sendix 5873) | OPC-PS eller OPC-PSH | PMSM |
| 7 | Sinusdifferentielt (1Vpp) | SSI (ECN1313) | OPC-PS eller OPC-PSH | PMSM |
| 8 | Sinusdifferentielt (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Parameter | Beskrivelse | BiSS *1 | SSI *2 | Hyperface *1 |
| L209 | Encoderens serielle kommunikation (antal ST-bits) | 13 | 13 | 15 |
| L212 | Aktivering og position af alarm-/advarselsbit (SSI) Bit 0: Aktivering af alarmbit (0 = deaktiveret) Bit 1: Aktivering af advarselsbit (0 = deaktiveret) Bit 2: Position for alarmbit (0 = før AL1, 1 = efter AL2) Bit 3: Advarselsbitposition (0 = før AL1, 1 = efter AL2) | 0 | 0 | - |
| L213 | Antal AL1-bits | 0 | 0 | - |
| L214 | Antal AL2-bits | 2 | 0 | - |
| L215 | Antal CRC-bits | 6 | 0 | - |
| L216 | CRC-polynomium | 67 | 0 |
Værdier valideret/testet på:
*1:
SMRS64 (Hohner)
5873 (Kübler)
WDGF 58M (Wachendorf)
*2:
5873 ThyssenKrupp-specifikation (Kübler)
SMRS64 (Hohner)
*3:
SRM50 (syg)
SRS50 (syg)
| Kode | Beskrivelse | |
|---|---|---|
| OC1 | Overstrøm under acceleration | Inverter-momentan-outputstrømmen oversteg overstrømsniveau. |
| OC2 | Overstrøm under deceleration | |
| OC3 | Overstrøm under kørsel med konstant hastighed | |
| DET EUROPÆISKE MILJØ- OG | Jordfejl | Nulfasestrøm forårsaget af jordfejl i outputtet har overskredet den tilladte grænse. (30 kW eller derover) |
| OV1 | Overspænding under acceleration | DC-forbindelsesbusspændingen oversteg overspændingsregistreringen niveau. |
| OV2 | Overspænding under deceleration | |
| OV3 | Overspænding under kørsel med konstant hastighed | |
| LV. | Undervoltage | DC-forbindelsesbusspændingen faldt til under det underspændingsniveau. alder |
| Lin * | Tab af inputfase | Der opstod et tab i inputfasen, eller interfasespændingen ubalance var stor. |
| OH1 | Køleplade overophedet | Temperaturen omkring kølelegemet er steget unormalt. |
| OH2 | Ekstern alarm | Den eksterne alarm THR blev indtastet. (når THR "Aktiver ekstern alarmtur" er blevet tildelt en hvilken som helst digital indgangsterminal) |
| OH3 | Inverter intern overophedning | Temperaturen inde i inverteren har overskredet tilladt grænse. |
| OH4 | Beskyttelse af motorkøretøjer (PTC/NTC thermistor) | Motorens temperatur er steget unormalt. |
| DBH | Overophedning af bremseregister | Temperaturen på bremsemodstanden har overskredet den tilladte grænse. |
| OL1 | Overbelastning af motor 1 | Den elektroniske termiske beskyttelse til registrering af motoroverbelastning blev aktiveret. |
| OLU | Overbelastning af inverter | Temperaturen inde i IGBT er steget unormalt. |
| OPERATIVSYSTEM | Forebyggelse over hastighed | Motorhastigheden er højere end maksimal hastighed * L32. |
| PG | Ødelagte ledninger i PG | Motorhastigheden er højere end maksimal hastighed * L32. |
| nrb | NTC-fejl ved afbrydelse af ledning | Detekteret et trådbrud i NTC's kredsløb til detektion af thermistor. |
| Er1 | Hukommelsesfejl | Der opstod en fejl under skrivning af data til inverteren hukommelse. |
| Er2 | Fejl i kommunikation på tastaturet | Der opstod en kommunikationsfejl mellem nøglen og inverteren. pude |
| Er3 | CPU-fejl | Der opstod en CPU-fejl eller en LSI-fejl. |
| Er4 | Fejl i alternativkommunikation | Der opstod en kommunikationsfejl mellem de tilsluttede og inverteren. |
| Er5 | Fejl i indstilling | Der blev fundet en fejl på det tilsluttede indstillingskort (ikke af inverteren). |
| Er6 | Beskyttelse mod driften | Der blev forsøgt en forkert handling. |
| Er7 | Fejl under justering | Justering af automatisk justering eller justering af poleringsposition mislykkedes. resulterer i unormale tuning resultater. |
| Er8 | RS-485-kommunikationsfejl (port 1) | Der opstod en kommunikationsfejl under RS-485 kommunikation. |
| Erp | RS-485-kommunikationsfejl (port 2) | |
| OPL | Tab af outputfase | Der opstod et tab i outputfasen. |
| Ere | Uoverensstemmelse mellem hastighed | Referencehastigheden og registreringshastigheden er forskellige. |
| Erf | Fejl under lagring af data under underspænding | Da underspændingsbeskyttelsen blev aktiveret, data kunne ikke gemmes, hvilket viser denne fejl. |
| ErH | Hardwarefejl | LSI'en på printkortet har ikke fungeret korrekt på grund af støj osv. |
| Ert | KAN åbne kommunikationsfejl | Der opstod en kommunikationsfejl under CANopen-kommunikation. |
| ECF | FEJL I EN1- OG EN2-terminalkredsløbet | En abnormitet blev diagnosticeret i EN1, EN2 terminaler kredsløb. |
| Ot | Over drejningsmomentstrøm | Henvisning til drejningsmoment nuværende blev overdreven. |
| DBA | Bremsetransistor brudt | Påvisning af abnormitet i bremsetransistoren |
| bbE | Bremsebekræftelse | Inverteren registrerer uoverensstemmelse mellem bremsekontrolsignalet og signalet til bremseregistrering (feedback). |
| Eo | EN1, EN2 terminaler chatter | Detekteret kollision mellem ENOFF-udgang og EN1/EN2-terminaler. indgang |
| 1984 19 | Logikfejl, der kan tilpasses | En logisk konfigurationsfejl, der kan tilpasses, har forårsaget en alarm. |
| OH6 | Opladning modstand overophedning | Temperaturen på opladningsmodstanden inde i har overskredet den tilladte grænse. Inverter |
| rbA | Redning ved bremsealarm | Der er ikke registreret nogen bevægelse under redningsoperationen ved hjælp af bremsekontrol. |
| Tca | Nå maksimalt antal tur skranke | Antallet af ændringer i kørselsretningen har nået det forudindstillede niveau. |
| SCA | Fejl ved kortslutningskontrol | Inverteren registrerer uoverensstemmelse mellem kortslutnings- kontrolsignal og kortslutningsdetekteringssignal (feedback). |
| LCO | Overbelastning af indlæsningscelle | Indlæsningscellefunktionen har registreret overbelastningssituationen ved hjælp af af forudindstillet niveau. |
| Kode | Alarmnavn | Underkoden | Beskrivelse |
|---|---|---|---|
| OC1 | Overstrøm under acceleration | 1 | Overstrømsbeskyttelse (OLT-afbrydelse) - Normal overstrøm |
| 2 | Overstrømsbeskyttelse (OCL-afbrydelse) - Normal overstrøm | ||
| OC2 | Overstrøm under deceleration | 3 | Kortslutningsbeskyttelse - Overstrøm i starten |
| 4 | Beskyttelse mod jordfejl - Overstrøm i starten | ||
| OC3 | Overstrøm under konstant hastighed | 5 | Detektionssignalfejl (FEJLsignal) - Gate-kredsløb |
| 11 | Registreringssignalfejl (OCT-signal) - Registreringskredsløb (PPCB) | ||
| 12 | Registreringssignalfejl (OCL-signal) - Registreringskredsløb (PPCB) | ||
| OV1 | Overspænding under acceleration | 1 11 | Beskyttelse mod overspænding (OVT-signal) Detektionssignalfejl (OVT-signal) |
| OV2 | Overspænding under deceleration | ||
| OV3 | Overspænding under konstant hastighed | ||
| Lin | Tab af inputfase | 1 | Registrering af ensretterdioderbeskyttelsesniveau |
| 2 | Registrering af kontinuerligt operationstoleranceniveau | ||
| OPL | Tab af outputfase | 1 | |
| OH1 | Kølefinne overophedet | 1 | Overophedning af kølefinne (NTC2) |
| 3 | Overophedning af konverter (NTC4) | ||
| 11 | Afbrydelse af thermistor (NTC2) | ||
| OH2 | Ekstern fejl | 0 | Beskyttelse gennem THR |
| OH3 | Overophedning i inverter | 0 | Overophedning af luften (NTC1) |
| OH4 | Beskyttelse af motorkøretøjer (PTC-thermistor) | 1 | PTC-derrmistor |
| 2 | NTS thermistor | ||
| OH6 | Opladning modstand overophedning | 1 | Opladningsmodstand overophedning Undtagen FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Afbrydelse af thermistor (NTC3) | ||
| OL1 | Overbelastning af motoren | 0 | Aktuel detektion elektronisk termisk |
| LV. | Undervoltage | 1 | Underspænding sker under gate ON |
| 11 | Minimumniveau for batteridrift | ||
| Dbh | DB modstand overophedning | 0 | Overophedning af DB-modstand (F50 <-> F52) |
| 1 | DB transistor 2sec_ON kontinuerligt (Forkert er for høj) | ||
| Dba | Registrering af DB-transistorfejl | 0 | Registrering af DB-transistorfejl |
| Er1 | Fejl i hukommelse | 0x0001 | Alarm historie ødelæggelse |
| 0x0002 | Standardfunktionskode | ||
| 0x0004 | Brugerfunktionskode | ||
| 0x0008 | Skjult funktionskode | ||
| 0x0010 | Fejl i programområde | ||
| 0x0040 | Uoverensstemmelse mellem læsning (forsøg igen) | ||
| 0x0080 | Uoverensstemmelse mellem skrivning (prøv igen) | ||
| 0x0100 | Udvidet område | ||
| 0x1000 | Justeringsværdiområde | ||
| Er2 | Fejl ved kommunikation af tastaturpanel | 1 | Registrering af afbrydelse |
| Er3 | CPU-fejl | 1 | CPU-genstart behandling |
| 1000 | Fejl i kontrolsum for funktionskode (RAM-fejl) | ||
| 0x0001 | Fejl i standardfunktionskode | ||
| 0x0002 | Fejl i skjult funktionskode (u-kode) | ||
| 0x0004 | Fejl i skjult funktionskode (n kode) | ||
| 0x0008 | Fejl i justeringsventilfunktionskode | ||
| 0x0010 | Udvidet område | ||
| 2000 | Fejl i fast cyklus | ||
| 0x0001 | L1-cyklusfejl | ||
| 0x0004 | L3-cyklusfejl | ||
| 0x0008 | L4-cyklusfejl | ||
| 0x0020 | L6-cyklusfejl | ||
| 0x0080 | Fejl i LP-cyklus | ||
| 3000 | Uretfærdigt snit i | ||
| 5001 | Eksternt RST-input | ||
| 7001 | Ødelæggelse af stakområde | ||
| 9000 | Registrering af softwarefejl | ||
| 0x0200 | Alarm QUE over | ||
| Er4 | Fejl i kommunikation af indstillinger | 1 | Port En kommunikationsfejl Der er ingen mulighed |
| 3 | Fejl ved port C-kommunikation | ||
| 10 | En overskydende installeret indstilling Der er ingen mulighed |
||
| Er5 | Fejl i indstilling | 0 | Mulighed i kamp |
| 1 | Fuldførelsessignal TIL (Der er ingen mulighed) | ||
| 10 | AIO PT EEPROM-fejl (Der er ingen mulighed) | ||
| 26 | Fejl i PR-PP-positionsoplysninger (kun OPC-PMPG+L01=2) | ||
| 27 | Startfejl i PP-positionsoplysninger | ||
| 50 | Intet lagringsområde | ||
| 51 | Fejl i kommunikationskommando | ||
| 52 | Fejl i skelnen kode | ||
| 53 | Fejl ved kontrol af sum | ||
| 54 | Fejl under skrivning | ||
| Er6 | Fejl i handlingsprocedure | 2 | Start kontrol |
| 7 | Fejl ved tildelt flere hastigheder | ||
| 8 | Bremsekontrol (ventetidstimeout) | ||
| 9 | |||
| 10 | Ingen prøve magnetisk pole position tuning | ||
| 11 | Fejl ved bekræftelse af kontakt eller bekræftelse på outputsiden | ||
| 12 | Manglende vurderingshastighed | ||
| 14 | Bremse chack (tildelt fejl) | ||
| 15 | Kortslutning (SCC-tildelt fejl) | ||
| 16 | Redningsfejl |
| Kode | Alarmnavn | Underkoden | Beskrivelse |
|---|---|---|---|
| Er7 | Ved induktion af motortuning | 1 | Fejl ved tildelt flere hastigheder |
| 2 | R1-fasefejl | ||
| 3 | %X fejl | ||
| 6 | Aktuel fejl under output | ||
| 7 | Drevkommando slået fra | ||
| 9 | BX-terminal TIL | ||
| 11 | Detektion af underspænding (LV) | ||
| 15 | Alarm opstår | ||
| 16 | Ændring af drevkommando | ||
| 19 | andre | ||
| 21 | I0-fejl | ||
| 24 | EN terminal | ||
| 25 | DRS-terminal | ||
| Er7 | Ved aktuel registrering opnår tuning | 32 | EEPROM-skrivefejl |
| 37 | STOP key_ON | ||
| Er7 | Ved forskydning af magnetisk stangposition | 51 | Tuning uden motor |
| 52 | Fejl ved justering af magnetisk stangposition | ||
| 53 | F42 indstilling miss | ||
| 54 | L04 uoverensstemmelse | ||
| Er7 | Ved aktuel justering af registreringsforskydning | 61 | EEPROM-skrivefejl |
| 62 | STOP key_ON | ||
| Er7 | Synkron motorjusteringsfejl | 5058 | Fejl i amaturemodstand (nedre grænse) |
| 5059 | Amaturemodstandsfejl (øvre grænse) | ||
| 5060 | Ld fejl (nedre grænse) | ||
| 5061 | Ld fejl (øvre grænse) | ||
| 5062 | Lq-fejl (nedre grænse) | ||
| 5063 | Lq-fejl (øvre grænse) | ||
| 5080 | Fejl i ACR-forstærkning (øvre grænse) | ||
| 5081 | ACR-gevinstfejl (nedre grænse) | ||
| Er8 | RS485-kommunikationsfejl | 0 | CH1 RS485-kommunikationsfejl |
| nrb | NTC-registrering af afbrydelse af udsteder | 0 | NTC-registrering af afbrydelse af udsteder |
| OPERATIVSYSTEM | Hastighedsoverskridelse | 0 | Beskyttelse overhastighed |
| Pg | PG-fejl | 1 | Afbrydelse registreres af hardware |
| 2 | Detektering af Z-faseafbrydelse via software | ||
| 50 | Indstilling – Registrering af A/B-fase (synd) | ||
| 51 | Indstilling – Registrering af C/D-fase (Sin) | ||
| 52 | Indstilling – Registrering af afbrydelse af R-fase (synd) | ||
| 53 | Indstilling – Registrering af A/B-fase (puls) | ||
| 54 | Mulighed – Registrering af afbrydelse af Z-fase (puls) | ||
| 55 | Indstilling – Registrering af U/V/W-fase (puls) | ||
| 60 | Mulighed - vagthund timeout | ||
| 61 | Indstilling – timeout for svar på seriel koder | ||
| 62 | Indstilling – CRC-fejl i CPU-kommunikation | ||
| 63 | Mulighed – CPU ud af kommunefejl | ||
| 70 | Indstilling – ABZ-outputfejl | ||
| 71 | Mulighed – seriel koder hver alarm | ||
| 72 | Indstilling - hukommelsesadgangsfejl | ||
| 73 | Indstilling – culcuration-fejl | ||
| 80 | Fejl under indstilling af PG-kort | ||
| Ere | Uoverensstemmelse mellem hastighed (hastighedsafvigelse overskydende) | 1 | Mærkerne for hastighedskommando og hastighedsregistrering er forskellige |
| 3 | Hastighedsafvigelsesekselser (hastighedsregistrering > hastighedskontrol) | ||
| 5 | Hastighedsregistrering fortsætter med at være 0 | ||
| 7 | Hastighedsafvigelsesekselser (hastighedsregistrering < speed command) | ||
| Erf | Fejl underlagring af underspændingsdata | 0 | Fejl underlagring af underspændingsdata |
| Erp | RS485 2ch kommunikationsfejl | 0 | CH2 RS485-kommunikationsfejl |
| Ert | CAN-kommunikationsfejl | 1 | Bus-off |
| 2 | Registrering af timeout for beskyttelse | ||
| OLU | Overbelastning af inverter | 1 | IGBT-beskyttelse |
| 2 | Inverter termisk Kun FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | FEJL I EN-kredsløb | 10 | EN-inputfejl (_EN1A=L, EN2A=L) |
| 11 | EN-inputfejl (_EN1A=H, EN2A=H) | ||
| 5000 | Fejl i diagnosekredsløb | ||
| 5010 | P5S-strømforsyningsfejl | ||
| 5020 | CPU-diagnose: Diagnosticering af portindstilling | ||
| 5030 | CPU-diagnose: ROM-diagnose | ||
| 5040 | CPU-diagnose: RAM-diagnose | ||
| 5050 | CPU-diagnose: sekvensovervågning | ||
| 1984 19 | Fejl i tilpasningslogikken | 0 | Fejl i tilpasningslogik |
| tage fejl | Simuleret fejl | 9998 | Simuleret fejl |
| Ot | For meget fejl i drejningsmoment | 0 | For meget fejl i drejningsmoment |
| bbE | Mekanisk bremsefejl | 11 | BREMSE 1 fejl |
| 12 | BREMSE 2 fejl | ||
| Eo | FEJL I EN-terminal | 0 | FEJL I EN-terminal |
| rbA | Fejl ved registrering af redningshastighed | 0 | Fejl ved registrering af redningshastighed |
| Tca | Modtagelse af retningsswitchgrænse | 0 | Modtagelse af retningsswitchgrænse |
| SCA | Fejl i kortslutning | 0 | Fejl i kortslutning |
| Lco | Fejl under indlæsning af celle | 0 | Fejl under indlæsning af celle |
| DET EUROPÆISKE MILJØ- OG | Beskyttelse af jorden | 0 | Trefaset strøm Kun FRN0060LM2A-4 <-> FRN0091LM2A-4 |
I gamle motorer kan auto-tuning mislykkes: i disse tilfælde kan auto-tuning type 1 (ved punkt 10 vælge P04 = 1) udføres, men i dette tilfælde værdierne P06 og P12 skal indtastes manuelt.

Typiske værdier af P06 er mellem 30% og 70% af P03.
 F.r. = Frekvensklassificeret
F.r. = FrekvensklassificeretS.s. = Hastighed synkron
S.r. = Hastighedsvurderet
Acceptable værdier af P12 er mellem 0,5 og 5 Hz.
For eksempel er den nominelle frekvens for en 4-polet motor 50 Hz, synkronhastigheden er 1500 omdrejninger i minuttet, og den nominelle hastighed er på motorens navneskilt (altid i omdrejninger i minuttet).
GEARLØS motor
I tilfælde af et problem vises "Fejl 52 = er7 Fejl VVVF" i MENUFEJL. I dette tilfælde skal du kontrollere motorkoderens tilslutninger, rydde fejlene i menuen "Fejl" og gentage poletuningproceduren fra punkt 14.
Efter poletuning procedure forsøge at flytte elevatoren i vedligeholdelse i op og ned for nogle motoriske omdrejninger. Hvis den bevæger sig korrekt proceduren er overstået, ellers, i tilfælde af en fejl i VVVF (ere eller Ocx eller Os), vende de to motoriske faser ændre VVVF's H190 parameter, rydde fejl i "Fault" menuen og gentag poletuning procedure.
Vejledning til softwareopdatering
Filnavn.PP2 eller .PP4
Indsæt USB-enheden i stikket og venter på meddelelsen som i figur 1.
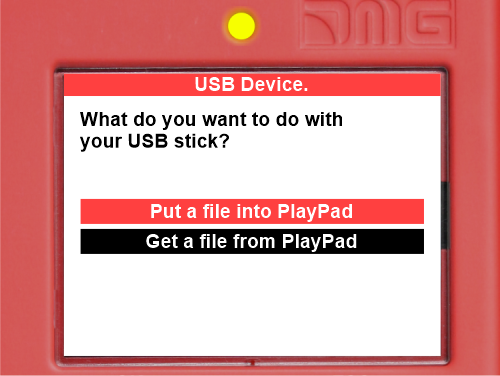 (Figur 1)
(Figur 1)Vælg "Sæt en fil i PlayPad" (standard), og tryk på knappen OK. Vinduet ændres til figur 2.
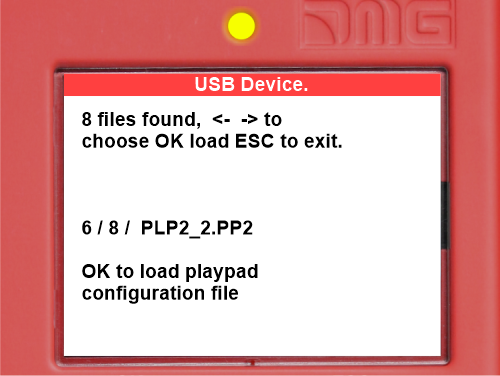 (Figur 2)
(Figur 2)Følg instruktionerne på skærmen og vælg .PP2/4-filen (i eksemplet PLP2_2.PP2) og tryk på OK. Vinduet ændres til figur 3
 (Figur 3)
(Figur 3)Klik på OK for at bekræfte opdateringsprocessen. Vinduesændringer i figur 4
 (Figur 4)
(Figur 4)I slutningen af proceduren skal du fjerne USB'en (Figur 5 eller Figur 6 vises).
 (Figur 5)
(Figur 5) (Figur 6)
(Figur 6) (Figur 7)
(Figur 7)Vinduet ændres til figur 8.
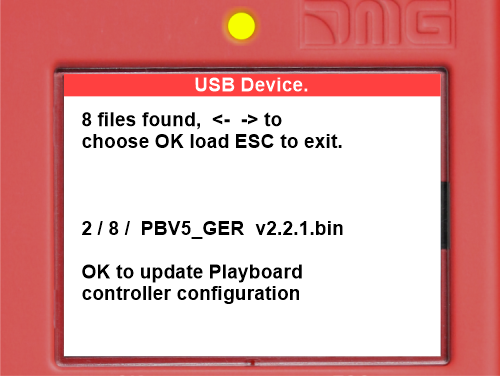 (Figur 8)
(Figur 8)Følg vejledningen på skærmen, vælg *.bin-filen, og tryk på OK. Vinduesændringer i Figur 9.
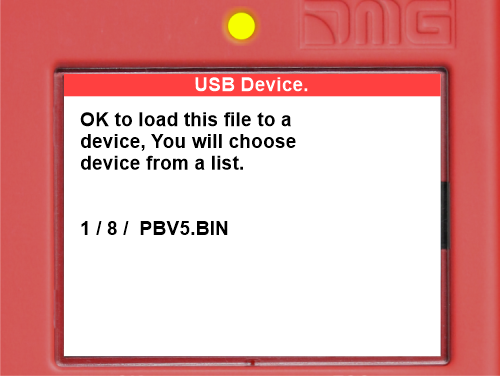 (Figur 9)
(Figur 9)Klik på OK for at bekræfte opdateringsprocessen. Vinduet ændres til Figur 10, vent et stykke tid.
 (Figur 10)
(Figur 10)Vælg den enhed (eller enhedsgruppe), der skal opdateres, og tryk på OK (Figur 11)
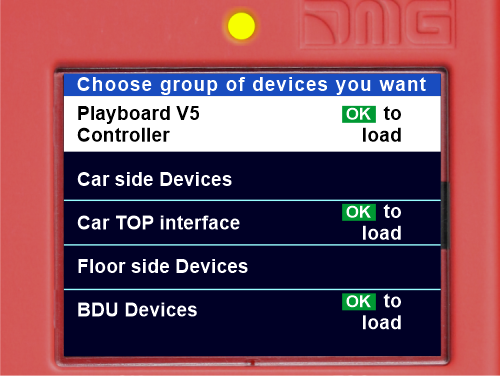 (Figur 11)
(Figur 11)Vinduet ændres til Figur 12: vent, indtil processen er afsluttet. Hvis du skal trykke på en pileknap for at tænde baggrundsbelysningen.
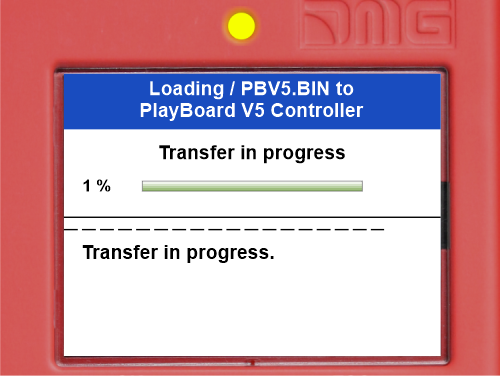 (Figur 12)
(Figur 12)Når processen slutter (Figur 13), skal du trykke på Esc-knappen, indtil windowshows "Please remove USB Device" (Figur 14).
 (Figur 13)
(Figur 13) (Figur 14)
(Figur 14)| Enhed | Nødvendig tid til opdatering af SW |
|---|---|
| Bundkort (Playboard Controller) | 3 minutter |
| AfspilPad 4.0 | 1 minut |
| TOC Board (Car TOP Interface) | 1 minut |
| DMCPIT Board (Car COP Interface) | 1 minut |
| Serielle trykknapper Interfaces (BDU-enheder) | 30 sekunder |
| Ekspansion bestyrelser (PIT8 / 16RL / 16IO) | 30 sekunder |
(Tabel III.1 – Timing for SW-opdatering)






