

Carte mère
La carte de commande du système Pitagora 4.0 est basée sur une technologie électronique 32 bits et permet de commander tous les types d'ascenseurs électriques et hydrauliques. Il est possible d'ajouter des connexions sérielles et/ou parallèles aux tableaux de commande (cabine et niveau). Il est particulièrement adapté aux installations électriques VVVF, même celles équipées du système de mouvement non contrôlé de la cabine d'ascenseur (Amendement A3 ou EN81-20 / 50).
- Jusqu'à 28 niveaux avec contrôle en série et jusqu'à 12 niveaux avec contrôle en parallèle
- Ligne série CAN Bus pour connecter l'affichage et les panneaux de commande de l'étage en série
- Ligne série CAN Bus pour la communication avec la cabine de l'ascenseur en série
- APB ; Collectif descendant, Collectif complet
- Contrôle de systèmes multiplex (max 6)
- Contrôle de portes alternatives ou sélectives sur des systèmes d'accès traversants ou adjacents
- Contrôle de la position de l'ascenseur par contacts magnétiques, encodeur incrémental DMG gaine , encodeur moteur ou système de positionnement absolu ELGO LIMAX 33 CP
- Interface de programmation/diagnostic, à bord et/ou à distance.
- Diagnostic de l'état, des erreurs, des pannes et de l'état des E/S
- Gestion des paramètres et des diagnostics de la VVVF (uniquement FUJI FRENIC LIFT LM2)
- Contrôle avancé de la VVVF avec contrôle de la vitesse, du confort et de l'arrêt de précision
- Mise à jour du logiciel via un dispositif USB
- Ligne série RS232 pour PC et connexion à un modem GPRS
- Compatibilité avec tous les produits DMG
- Compatibilité avec toutes les solutions +A3 pour les systèmes électriques et hydrauliques
- Protection de l'accès gaine (Accès non autorisé gaine )
La carte mère 4.0 contient le matériel et le logiciel qui permettent de contrôler l'ascenseur et tous ses périphériques. Grâce aux modules de programmation intégrés et/ou à distance, elle permet d'accéder à toutes les fonctionnalités disponibles. Les entrées et les sorties sont connectées à tous les dispositifs électroniques et électromécaniques du site armoire de manœuvre et de l'ascenseur.
La carte mère est dotée d'un module de programmation amovible qui permet de visualiser et de modifier tous les paramètres de base pour la gestion et la configuration du panneau de commande. Dans la version VVVF, il est également possible de visualiser et de modifier les paramètres FUJI de la configuration de base (menu VVVF BASE) et avancée (menu VVVF ADVANCED).
Pour plus de détails sur le fonctionnement du module de programmation et sur le menu étendu du système de gestion, voir le paragraphe modification des paramètres du système.
Module de programmation à distance
Une autre façon d'accéder au menu de configuration de armoire de manœuvre, en mode visualisation/modification, consiste à connecter le clavier amovible du Playboard DMG V3 (PlayPad) au connecteur PLP V3, monté sur le tableau de commande de l'ascenseur.
Ce module peut être connecté de différentes manières :
- Connecté directement
- Connecté par un câble d'extension dédié directement sur le tableau (dans la salle des machines)
- Connecté à la carte sur le toit de la cabine d'ascenseur (TOC) dans le cas d'ascenseurs avec des dispositifs série pré-câblés DMG.
Une autre façon d'accéder au site armoire de manœuvre est basée sur l'application Fusion.

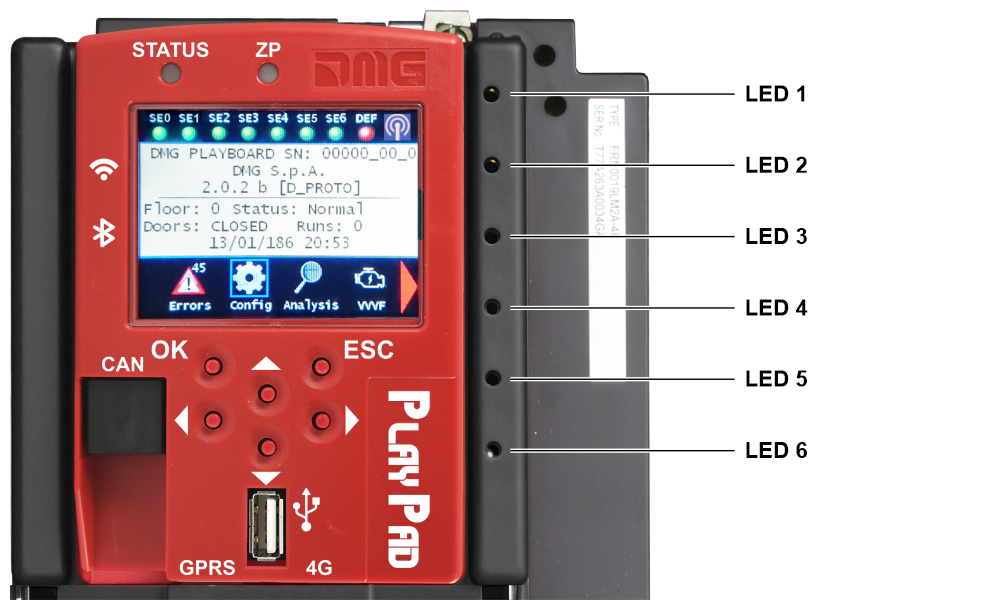
Sur la carte mère sont présentes 6 leds pour un diagnostic facile :
LED1 (LED verte)
Terminaison multiplex CAN active : la led s'éteint lorsque la carte MULX est connectée (la terminaison se déplace automatiquement sur la carte MULX du premier et du dernier multiplex armoire de manœuvre).
LED2 (LED verte)
Terminaison CAN Cabine active : la led s'éteint lorsqu'une carte optionnelle (PIT8 / 16IO / 16RL) est connectée à l'intérieur de armoire de manœuvre (la terminaison se déplace automatiquement sur la dernière carte optionnelle).
LED3 (LED RGB)
La couleur de cette led donne des informations sur l'état interne de l'ascenseur selon le tableau suivant :
| Couleur | Statut |
|---|---|
| Led off | Le système effectue la procédure de réinitialisation |
| Vert | Le système est en mode de fonctionnement normal |
| Jaune | Le système est en mode inspection |
| Rose | Le système est en mode de fonctionnement temporaire |
| Violet | Le système est hors service (stationnement de la cabine) |
| Cyan | Le système fonctionne en mode prioritaire (LOP / CABINE). |
| Rouge | Le système fonctionne en mode "pompiers". |
| Blanc | Le système exécute la procédure d'urgence |
| Bleu | Le système exécute la procédure de contrôle de la dérive de la cabine d'ascenseur. |
LED4 (LED jaune)
Le voyant clignote lorsque la carte fonctionne.
LED5 (Led verte)
Led on donne l'état de la chaîne de sécurité SE5
LED6 (LED rouge)
| Led Off | Aucun défaut actif |
| Led clignotante | Un (ou plusieurs) défaut(s) actif(s) |
| Led On | Défaut de verrouillage actif |

| Nom | Description | |
|---|---|---|
| FJ1 | Interface FUJI | Connexion à l'interface FUJI à l'intérieur de l'onduleur. |
| J4 | FUJI Analogique / Série | Connexion au FUJI utilisé en cas d'onduleur à distance. |
| J6 | Parallèle Signalisations | Connexion à la carte APPO. Il comprend tous les parallèles signalisations disponibles sur le bloc bornier à l'intérieur du panneau de commande. |
| J8 | Circuit UCM | Connexion au circuit pour la solution UCM. Pitagora 4.0 dispose de ses propres solutions certifiées pour la gestion de la solution UCM dans les installations d'ascenseurs. Le système UCM se compose de trois parties : - Détecteur qui détecte un mouvement involontaire de la cabine. - Actionneur qui met en œuvre l'action de freinage - Le dispositif d'arrêt qui arrête la cabine. Le dispositif d'arrêt doit être un dispositif de sécurité certifié et il est de la responsabilité de l'installateur de s'assurer de la compatibilité des différents éléments du système UCM. Pour la vérification fonctionnelle de l'ensemble du système et la mesure des espaces et des temps d'intervention, des tests spécifiques sont prévus à effectuer au à la fin du montage (voir Test et mesures). Pour plus d'informations sur les connexions et les paramètres, voir la section Circuit UCM). Une liste non exhaustive des types de systèmes et de solutions UCM les plus utilisés est présentée dans le tableau suivant, où sont mises en évidence les différentes solutions applicables, chacune d'entre elles possédant une interface et un circuit de programmation dédiés. L'interfaçage avec les dispositifs énumérés est effectué conformément aux spécifications indiquées dans les manuels des fabricants concernés. Lorsque le système de positionnement absolu ELGO LIMAX 33CP est fourni(lien), sa fonction UCM certifiée est utilisée. Voir le tableau "Système UCM" ci-dessous |
| J9 | Circuit de dégagement | Circuit pour faire le bypass du contact de sécurité de la porte pour : - Pré-ouverture et/ou - la remise à niveau En cas de système de positionnement par codeur absolu, ce connecteur n'est pas utilisé. Le circuit de gestion de l'opération de remise à niveau se compose d'un module de sécurité et d'un relais de sécurité. Ce circuit permet de contourner les contacts de sécurité des portes, permettant ainsi le déplacement de la cabine avec des portes ouvertes à vitesse réduite dans la zone autorisée (zone de déverrouillage des portes) en cas d'abaissement du niveau de la cabine d'ascenseur, d'arrêt non précis de la cabine d'ascenseur ou de préouverture des portes. La sortie ISO se ferme sur GND. - Sortie ISO (contact de relais de sécurité des portes de contournement) collecteur ouvert Max 24V 100mA - Entrée CCISO (Monitor ISO safety relay) fermeture à GND (NC) I = 5mA - Entrée TISO (module de sécurité Monitor) fermeture à GND (NC) I = 5mA - S11-S12 (contact libre) se ferment quand ISO1 est fermé. La deuxième activation signalisation pour le module de sécurité provient directement d'un deuxième capteur (ISO2) et elle doit se fermer à GND. |
| J10 | Light Curtain / >|< | A utiliser uniquement dans une configuration complètement parallèle. Connexion à la vis bornier de l'armoire. |
| J11 | Chaîne de sécurité | Connexion à la carte SECU. Il comprend les 7 points de lecture de la chaîne de sécurité. Le système est basé sur un circuit opto-isolé relié à la terre (à l'intérieur de la carte SEC) : - Entrée SE0 <-> SE6 opto-isolé 48 Vdc Au-dessus du circuit de sécurité, il faut prévoir un disjoncteur magnétique de taille appropriée (Imax = 0,5 A). - SE0 est le point de départ de la chaîne de sécurité (après la protection DIS à l'intérieur de armoire de manœuvre). - SE1 contrôle la zone d'arrêt gaine et la boîte d'inspection PIT. - SE2 contrôle l'arrêt de la cabine d'ascenseur et la boîte d'inspection TOC. - SE3 contrôle les interrupteurs de fin de course, le dispositif de sécurité, le régulateur de survitesse. - SE4 contrôle NIVEAU VERROUILLAGES PRÉLIMINAIRES - SE5 contrôle NIVEAU VERROUILLAGES - SE6 contrôle CABINE PORTES et systèmes de contact pré-déclenchés. Si l'interrupteur de fin de course, le limiteur de vitesse ou le réducteur de sécurité est activé (le point SE3 de la chaîne de sécurité s'ouvre), le système est mis hors service. Pour le remettre en service, vous devez réinitialiser l'erreur SE3 via le module de programmation. Il est évident que le contact de sécurité de l'interrupteur de fin de course de survitesse doit d'abord être réinitialisé. |
| J12 | Multiplex CAN | Connexion à la carte MULX. Elle comprend la ligne CAN pour les installations Multiplex. Pour plus d'informations sur les connexions et les paramètres, voir l'ANNEXE I. |
| J13 | Cabine à Niveau | Signalisations sortie du capteur de la zone de la porte pour la lumière signalisation sur l'armoire. |
| J14 | Hydro Command | Connexion à la carte COIL. Il comprend les commandes de déplacement pour les installations hydroélectriques. Il peut être utilisé également dans le cas d'installations de Remote Inverter. |
| J15 | Circuit EN81-21 | Connexion au circuit pour la gestion de la protection en cas d'installation avec espace réduit dans la fosse. Elle comprend la gestion du circuit bistable sur les portes et les dispositifs de protection (système pré-déclenché ou protection manuelle dans la fosse). Pour plus d'informations sur les connexions et les paramètres, voir l'ANNEXE IX. |
| J16 | Position du codeur | Système de positionnement basé sur un codeur incrémental : - DMG gaine Encoder ou - Encodeur moteur (uniquement pour l'ascenseur à moteur sans engrenage VVVF) En cas de système de positionnement par codeur absolu, ce connecteur n'est pas utilisé. |
| J18 | Température de l'environnement | Connexion au capteur de température ambiante. Pour utiliser la fonction de contrôle de la température ambiante, il faut disposer du module capteur de température DMG (Cod. Q40.SND). Cette fonction arrête le système lorsque la température de la salle des machines descend en dessous du seuil minimum ou augmente au-dessus du seuil maximum fixé. |
| J19 | Panel PME | Connexion au panneau de contrôle à l'intérieur de l'armoire. |
| J20 | Sortie Spare | Sortie générique utilisée pour des fonctions spéciales. |
| J21 | Circuit d'urgence | Circuit pour une urgence ou une évacuation complète avec ouverture du frein. |
| J22 | Relais moteur | Connexion au relais pour les contacteurs de moteur (ou activer signalisations en cas d'installation sans contacteur). Il comprend également l'entrée de surveillance des contacteurs principaux. |
| J23 | Relais de freinage | Connexion au relais pour les contacteurs de frein (ou les valves dans le cas d'une installation hydro). Il comprend également l'entrée de surveillance des contacteurs de frein. |
| J25 | Test des batteries | Connexion à la carte CHAR. Il comprend le site signalisations pour : - Batteries faibles - Séquence de phase (uniquement Hydro) - Mode de sauvegarde |
| J26 | Tableaux optionnels | DMG Conseil facultatif pour : - Boutons poussoirs précâblés parallèles (PIT8) - Carte 16 sorties relais (16RL) : La carte d'extension est nécessaire notamment pour piloter des afficheurs parallèles (1 fil / Niveau, 1 fil / segment, code Gray, binaire) comme sorties directes disponibles. - Carte 16 entrées/sorties (16IO) |
| M1 | Alimentation électrique | Alimentation électrique provenant d'un fournisseur commercial d'énergie stabilisée. Le négatif bornier des circuits d'alimentation et du chargeur de batterie doit être relié à la terre. Alimentation de l'horloge interne : Super Condensateur (autonomie de 5 jours sans alimentation). |
| Système UCM | |||
|---|---|---|---|
| Type de système | Détecteur | Actionneur | Dispositif d'arrêt |
| Ascenseur électrique. Pas de manœuvres avec des portes ouvertes. | Non nécessaire. (uniquement le moniteur des freins) | ||
| Ascenseur électrique. Manœuvres avec portes ouvertes. | Pitagora 4.0 | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Freins (*) |
| Ascenseur électrique. Manœuvres avec portes ouvertes avec ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Freins (*) |
| Ascenseur électrique. Régulateur de vitesse avec dispositif anti-dérive (**) | Pitagora 4.0 | Interruption de l'alimentation de la broche. | Matériel de sécurité |
| Ascenseur électrique. Régulateur de vitesse avec dispositif anti-dérive (**) avec ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruption de l'alimentation de la broche. | Matériel de sécurité |
| Relevage hydraulique avec double valve de descente | Pitagora 4.0 | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Soupapes (***) |
| Relevage hydraulique avec double valve de descente avec ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Soupapes (***) |
| Relevage hydraulique avec gestion électronique des soupapes (unité de contrôle certifiée) | Pitagora 4.0 | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Soupapes (***) |
| Relevage hydraulique avec gestion électronique des soupapes (unité de contrôle certifiée) avec ELGO LIMAX 33CP | ELGO LIMAX 33CP | Interruption des commandes de freinage (chaîne de sécurité ouverte) | Soupapes (***) |
(*) solution applicable exclusivement pour les freins doubles certifiés comme élément d'arrêt UCM selon EN81-20 5.6.7.3 et 5.6.7.4 (moteurs sans engrenage ou moteurs avec réducteur et frein lent gaine ).
(**) Limiteurs certifiés UCM avec broche anti-dérive (par exemple Montanari RQxxx-A, PFB LKxxx avec bobine LSP, ou dispositifs similaires).
(***) Vannes en série certifiées comme élément d'arrêt UCM selon EN81-20 5.6.7.3 et 5.6.7.4
Menu de programmation et modification des paramètres du système
Carte du menu de l'écran V3
| CARTE DE CONTRÔLE DE L'ASCENSEUR DMG S.p.A. | Langue ? Français, anglais, portugais, italien, russe, allemand, néerlandais ENTER : confirmer / ESC : quitter |
|
| ▲ ▼ | ▲ | |
| Code ? ** Mot de passe ** | ----- ENTER ----> | État du système |
| ▲ ▼ | ||
| Défauts | ||
| ▲ ▼ | ||
| État des E/S | ||
| ▲ ▼ | ||
| Configuration | ||
| ▲ ▼ | ||
| Portes | ||
| ▲ ▼ | ||
| Signalisations | ||
| ▲ ▼ | ||
| Fonctions spéciales | ||
| ▲ ▼ | ||
| Positionnement | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Paramètres de reconnaissance | ||
| ▲ ▼ | ||
| Horloge |
"Menu "État du système
On y accède facilement depuis la fenêtre principale du PlayPad, en appuyant une fois sur la touche ENTER.
| État du système | Description | Visualisation sur Affichage en série |
|---|---|---|
| Réinitialisation de | Le système effectue la procédure de réinitialisation | O - |
| En service | Le système est en mode de fonctionnement normal | |
| Inspection | Le système est en mode inspection | OU |
| Temp. Operat | Le système est en mode de fonctionnement temporaire | P |
| Hors service | Le système est hors service | |
| Cabine Priorité | Le système fonctionne en mode priorité cabine d'ascenseur (interrupteur à clé de priorité activé). | |
| Pompiers | Le système fonctionne en mode pompiers (opérations diverses) | |
| Urgence | Le système exécute la procédure d'urgence | E |
| Contrôle de la dérive | Le système exécute la procédure de contrôle de la dérive de la cabine d'ascenseur. | |
| Opération ascendante | Le système fonctionne vers le haut | |
| Opération vers le bas | Le système fonctionne à la baisse | |
| Remise à niveau | La cabine de l'ascenseur se trouve au niveau de niveau et est en train de se remettre à niveau. | |
| Toujours à niveau | La cabine d'ascenseur est au niveau de niveau , sans appels enregistrés. | |
| Haute vitesse | Le système fonctionne en mode haute vitesse | |
| Basse vitesse | Le système fonctionne en mode basse vitesse | |
| Fermeture de la porte | La porte est complètement fermée | |
| Porte ouverte | La porte est ouverte (ou s'ouvre/se ferme) | |
| Cabine pleine charge | La cabine d'ascenseur a été entièrement chargée | |
| Photocellule A | L'entrée correspondant à l'entrée de la cellule photoélectrique A est active. | |
| Photocellule B | L'entrée correspondant à l'entrée de la cellule photoélectrique B est active. | |
| Bouton BRA | L'entrée correspondant au bouton de porte ouverte de l'entrée A est active. | |
| Bouton BRB | L'entrée correspondant au bouton de porte ouverte de l'entrée B est active. |
"Menu "Défauts
Ce menu liste les 60 derniers défauts enregistrés dans la mémoire interne du armoire de manœuvre. Toutes les pannes sont décrites dans la section Dépannage.
AVERTISSEMENT : En cas de coupure de courant, la mémoire interne n'est sauvegardée que si la batterie est connectée.
| Niveau 0 12:30:56 < Défauts > | ----- ENTER ----> | Niveau 0 < Défauts > Aucun défaut | ||
| ----- ENTER ----> | Niveau 0 < Défauts > Défauts : 4 Affichage ? | ----- ENTER ----> | < Défauts > 3/4 43 = Inspection Pos : 0 # 1 Cod. 0 17/03/09 10:10 * (voir ci-dessous pour les détails) |
|
| ▲ ▼ | ||||
| Réinitialiser tous les défauts enregistrés (appuyez sur ENTER pour confirmer) NOTE : les défauts sont effacés lorsque la cabine de l'ascenseur s'arrête | Niveau 0 < Défauts > Défauts : 4 Remise à zéro ? | |||
| ▲ ▼ | ||||
| Effacer l'erreur détectée sur l'interrupteur de fin de course (appuyer sur ENTER pour confirmer) NOTE : l'annulation effective ne se produit que lorsque le système de mémoire est arrêté | Niveau 0 < Défauts > Défauts : 4 Réinitialiser XXX ? (voir tableau ci-dessous) | |||
| Défauts | Description |
|---|---|
| Réinitialiser SE3 | Défaut de l'interrupteur de fin de course ; vous ne pouvez l'effacer qu'après avoir fermé la chaîne de sécurité. |
| Réinitialisation 82212 | Contrôle de la dérive |
| Réinitialisation RSP | Défaut RSP ; pour une fosse et une hauteur de chute réduites. |
| Réinitialisation de l'UCM | Défaut de l'UCM ; pour l'amendement A3 |
| Réinitialisation de l'ISO | Défaut ISO ; détection d'un problème dans la surveillance du fonctionnement du module de sécurité pour l'ouverture avancée de la porte / la remise à niveau. |
| Réinitialisation SCS | Défaut SCS ; installation 81-20. |
| Réinitialisation de l'UAS | Défaut UAS ; Fonction spéciale. |
"Menu "État des E/S
 | ----->>>>> |  | ----->>>>> | Niveau 0 - 12:30:56 < Statut E/S > |
| Champ | Description | Navigation | Valeurs (groupe de 12) | ||||
|---|---|---|---|---|---|---|---|
| Cabine appel | Simulation de l'appel d'une cabine d'ascenseur | ▲▼ (Sélectionner niveau) ENTER (Confirmer) ESC (Quitter) | |||||
 Playboard IN-OUT | Entrées/sorties du système □ = Contact ouvert ■ = Contact fermé | ▲▼ (Changer de groupe) ENTER (Sortie) ESC (Sortie) | GROUPES | ||||
| 1/9 | REM VHS SUR | ROUGE TH1 COM | REV TH2 LE | REV1 REV2 LTMP |
|||
| 2/9 | RMO BRK RDE | RGV RMV RPV | MTR YBRK CCF | CCO CCOB |
|||
| 3/9 | BRA FOA ROA | CEA FFA RFA | BRB FOB ROB | CEB FFB RFB |
|||
| 4/9 | HS BFR OTM | PCA | POM RPH J20 | CPOM IEME OEME |
|||
| 5/9 | FLM FLD | BIP GNGM GNGD | 511B 511L | DSA 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | FAI ZP | FAS TISO | CAM ISO | AGH AGB CISO |
|||
| 8/9 | REM REM1 REM2 | RED RED1 RED2 | PME OVS | REV REV1 REV2 |
|||
| 9/9 | L-RED L-GREEN BUZZER | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF IN-OUT | VVVF Entrées/sorties □ = Contact ouvert ■ = Contact fermé | ▲▼ (Changer de groupe) ENTER (Sortie) ESC (Sortie) | GROUPES | ||||
| 1/8 | EN FWD REV | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 RST | Y3 30 A/B/C | Y4 | |||
| 3/8 | BUSY ACC DEC | ALM INT BRK | EXT NUV RL | TL VL IL |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST --- | Fref = 0,00 Hz TRQ --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Codeur 0 P/s --- kW MAIN = |
||||||
| 7/8 | Défaut VVVF 0 = --- 2 = --- | Défaut VVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 boutons | Statut des boutons d'appel □ = Bouton non activé ■ = Bouton activé | ▲▼ (Changer de groupe) ◄► (Cab/down/up) ENTER (Sortie) ESC (Sortie) | GROUPES | ||||
| Côté cabine A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Côté cabine B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| bouton côté bas A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| bouton côté bas B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Vers le haut côté A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Vers le haut côté B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Cartes AUX | Cartes Entrées/sorties AUX □ = Contact ouvert ■ = Contact fermé | ▲▼ (Changer de page) ENTER (Quitter) ESC (Quitter) | CARTES 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| CARTES 16 IO OUT | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| CARTES 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| Entrées de l'EDR | Entrées BDU □ = Contact ouvert ■ = Contact fermé | ▲▼ (Changer de page) ◄► (Changer de groupe) ENTER (Quitter) ESC (Quitter) | Groupe : Porte, Incendie, Clé 1, Clé 2, Clé 3, Clé 4. Pour chaque groupe, l'état du contact est affiché pour chaque plan. |
||||
 Liste d'enregistrement des appels | Liste d'enregistrement des appels □ = Appel non enregistré ■ = Appel enregistré | ▲▼ (Changer de groupe) ◄► (Cab/down/up) ENTER (Sortie) ESC (Sortie) | Même groupes que PUSHBUTTONS | ||||
| [0] Début = ... [1] Début = ... [2] Début = ... | Compteurs d'exécution 0] partiel (réinitialisable) 1] Total 2] Utilisation future | ◄► (Modifier) ENTER (Réinitialisation et sortie) ESC (Sortie) | La date indiquée se réfère à la dernière remise à zéro du compteur partiel [0]. | ||||
| Analogique | Mesures analogiques | ▲▼ (Changer de page) ESC (Quitter) | 24 V = Alimentation électrique VCAB = Absorption de l'armoire et de la cabine VMR = Absorption des BDU 24VB = Tension des batteries +5.0 V = Alimentation interne de la carte TAMB = Capteur de température ambiante PWM = Sortie analogique de vitesse |
||||
| Mesures du COT | Mesures analogiques | ▲▼ (Changer de page) ESC (Quitter) | T_SHA = gaine température MAIN = Alimentation électrique du COP COP_A = COP côté A absorptions COP_B = COP côté B absorptions |
||||
| Mesures de la COP | Mesures analogiques | ▲▼ (Changer de page) ESC (Quitter) | MAIN_A = Alimentation du COP A MAIN_B = Alimentation du COP B T_CAR = Température de la cabine |
||||
| NIVEAUX Ligne | BDU Ligne de communication | ENTER (Réinitialisation) ESC (Sortie) | Erreur : Numéro d'erreur de communication FER : Taux d'erreur de trame Date et heure de la dernière réinitialisation |
||||
| CABINE Ligne | TOC / COP Ligne de communication | ENTER (Réinitialisation) ESC (Sortie) | Erreur : Numéro d'erreur de communication FER : Taux d'erreur de trame Date et heure de la dernière réinitialisation |
||||
| Ligne MTPX | MULTIPLEX Ligne de communication | ▲▼ (Changer de page) ENTER (Réinitialisation) ESC (Quitter) | Erreur : Numéro d'erreur de communication FER : Taux d'erreur de trame Date et heure de la dernière réinitialisation |
||||
| Modèle ELGO : | Le diagnostic d'ELGO | ||||||
Paramètres de description de la table PLAYBOARD IN-OUT
| Entrée | Description |
|---|---|
| SE0 | Chaîne de sécurité Début |
| SE1 | Contacts de sécurité de la fosse à chaîne |
| SE2 | Chaîne de sécurité en haut de la cabine de l'ascenseur Boîte d'inspection/arrêt |
| SE3 | Chaîne de sécurité fin de course, engrenage de sécurité, régulateur de vitesse |
| SE4 | Chaîne de sécurité portes de hall contacts préliminaires |
| SE5 | Chaînes de sécurité pour les portes des halls, serrures à inertie |
| SE6 | Contacts de portes de cabines d'ascenseurs à chaîne de sécurité et dispositif de pré-déclenchement (81-21) |
| CCO CCOB | contrôle des contacteurs de puissance |
| CISO | Surveiller le relais ISO |
| TISO | Contrôle du module de sécurité SM1 |
| LE | Lumière d'urgence (alimentation de la lumière de la cabine d'ascenseur) |
| BFR | bouton de fermeture de la porte |
| PCA | Fonction de priorité des cabines d'ascenseur |
| POM | Opérations des pompiers (interrupteur à clé Hall) |
| CPOM | Opérations des pompiers (Cabine interrupteur à clé) |
| SUR | Contrôle de la surcharge |
| COM | Contrôle de la charge complète |
| HS | fonction hors service |
| ZP | zone de la porte signalisation |
| RPH | Contrôle de la séquence des phases |
| REV REV1 REV2 | Fonction d'inspection (salle des machines) Fonction d'inspection (haut de Cabine) Fonction d'inspection (PIT) |
| REM REM1 REM2 | Inspection en haut (salle des machines) Inspection vers le haut (haut de Cabine) Inspection en haut (PIT) |
| RED RED1 RED2 | Inspection en bas (salle des machines) Inspection en bas (haut de Cabine) Inspection en bas (PIT) |
| TH1 TH2 | Contrôle du capteur de température du moteur (huile) |
| IEME | Urgence (panne d'alimentation électrique) |
| PME | Sélecteur de PME (évacuation d'urgence) |
| AGH AGB | Interrupteur de décélération supérieur Interrupteur de décélération inférieur |
| FAS FAI | Capteurs de position (pas de système de positionnement par encodeur) |
| E511 | Entrée optionnelle pour l'accès à gaine |
| BYPL BYPC | Sécurité de la porte Sélecteur de bypass |
| BRA | Bouton d'ouverture de la porte (entrée A) |
| CEA | Entrée de la cellule photoélectrique A |
| FOA | Entrée de l'interrupteur de fin de course d'ouverture de la porte A |
| FFA | Entrée de l'interrupteur de fin de course de fermeture de la porte A |
| BRB | Bouton d'ouverture de la porte (entrée B) |
| CEB | Entrée de la cellule photoélectrique B |
| FOB | Entrée de l'interrupteur de fin de course d'ouverture de la porte B |
| FFB | Fine corsa chiusura (Porta B) |
| BR1 | Interrupteur de contrôle du frein 1 |
| BR2 | Interrupteur de contrôle du frein 2 |
| IN_A IN_D | Contrôle du circuit UCM |
| Sortie | Description |
|---|---|
| VHS | Sortie - éclairage hors service |
| RMV | Sortie - commande de vitesse intermédiaire |
| BRK | Sortie - Commande de freinage |
| MTR | Sortie - Commande du moteur |
| YBRK | Sortie - Commande de freinage (VVVF) |
| ISO | Sortie - Commande de nivellement |
| RGV | Sortie - commande à haute vitesse |
| RPV | Sortie - commande de basse vitesse |
| RMO | Sortie - commande de déplacement vers le haut |
| RDE | Sortie - commande de descente |
| LTMP | Sortie - commande de l'éclairage de la cabine d'ascenseur limitée dans le temps |
| CAM | Sortie - Commande de rampe de retrait |
| OEM | Sortie - commande d'urgence |
| CCF | Sortie - Court-circuit de la phase moteur |
| J20 | Sortie - programmable (connecteur J20) |
| ASD | Sortie - désactivation des alarmes |
| 511B | Sortie - Norm 511 Buzzer |
| 511L | Sortie - Norm 511 Light |
| 212B | Sortie - Norm 212 Buzzer |
| FLD | Sortie - commande des flèches vers le bas |
| FLM | Sortie - commande des flèches vers le haut |
| GNGD | Sortie - commande de gong vers le haut |
| GNGM | Sortie - commande de gong vers le bas |
| BIP | Sortie - Signalisation du BIP dans la cabine |
| PWR | Commande d'alimentation du module UCM |
| ENAB | Commande d'activation du module UCM |
| ROA | Sortie - commande d'ouverture de la porte (entrée A) |
| RFA | Sortie - commande de fermeture de porte (entrée A) |
| ROB | Sortie - commande d'ouverture de la porte (entrée B) |
| RFB | Sortie - commande de fermeture de la porte (entrée B) |
| L-RED | Feu de signalisation signalisation 81-20/21 |
| L-GREEN | Feu de signalisation signalisation 81-20/21 |
| BUZZER | Buzzer signalisation pour le bypass 81-20 |
Paramètres de description de la table VVVF IN-OUT
| Signalisations | Description |
|---|---|
| EN | Activation de l'entrée numérique (vis bornier EN) |
| FWD | Entrée numérique ascendante (vis bornier FWD) |
| REV | Entrée numérique descendante (vis bornier REV) |
| X1 | Entrée numérique haute vitesse (vis bornier X1) |
| X2 | Entrée numérique de la vitesse REV (vis bornier X2) |
| X3 | Entrée numérique basse vitesse (vis bornier X3) |
| X4 | Entrée numérique (morsetto X4) |
| X5 | entrée numérique (vis bornier X4) |
| X6 | Ingresso digitale (morsetto X6) |
| X7 | Ingresso digitale (morsetto X7) |
| X8 | Entrée numérique d'urgence (vis bornier X8) |
| 0,0 V | Entrée analogique VVVF (borniers 11-12) |
| Codeur | Entrée VVVF du codeur (boucle fermée) |
| MAIN | Version du firmware du VVVF |
| Y1 | Sortie numérique (bornier Y1 ) |
| Y2 | Sortie numérique (bornier Y2 ) |
| Y3 | Sortie numérique (bornier Y3 ) |
| Y4 | Sortie numérique (bornier Y4) |
| Y5A/C | Relais de commande de freinage (bornier Y5) |
| 30 A/B/C | Relè (bornier 30 A/B/C) |
| ALM | Signalisation de l'alarme VVVF |
| RST | Remise à zéro VVVF |
| ACC | Accélération |
| DEC | Décélération |
| Fout | Fréquence de sortie |
| Vout | Tension de sortie |
| Iout | Courant de sortie |
| Imax | Courant de sortie maximal |
"Menu "Configuration
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 Configuration > |
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Opérations temporaires | Mode de fonctionnement temporaire du système | ◄► (Choix) | Non ; Oui | Non |
| Test | Pour faciliter les contrôles et le démarrage de l'installation. Pour la description, voir l'annexe II. | |||
| Code ? | Protection par mot de passe pour accéder à la programmation | ◄► (Changer les caractères) ▲▼ (Sélectionner les caractères) | 8 caractères (0 - 9 ; A - Z ; a - z ) | pas de mot de passe |
| Configuration | Type de configuration de câblage : -) Fil standard borniers (Cabine et niveaux) ; -) Comm. en série dans la cabine d'ascenseur, 1 ligne/ connecteursniveau à niveaux; -) Fil borniers dans la cabine d'ascenseur, Communication série à niveaux (modules BDU) ; -) Communication série pour la cabine d'ascenseur et niveaux. | ◄► (Choix) | Cabine & Fl. STD ; Cabine SER. / Fl. RJ45 ; Cabine STD. / Fl. BDU ; Cabine SER. / Fl. BDU | Cabine SER / Fl. RJ45 |
| Type de contrôle | Type de commande pour l'ascenseur | ◄► (Choix) | -SAPB ; -SAPB record -SAPB pression constante -Down collectif ; -Tout collectif ; | SAPB ; |
| Entraînement | Type de traction : -) Traction VVVF -) Hydraulique - Moteur direct (Dir) : Peut être utilisé également en cas de VVF activé uniquement en direction UP. -) Hydraulique - Démarreur progressif du moteur (S-S) : -) Hydraulique - Moteur Star Delta (Y-D) : -) Hydraulique - Moteur avec inverseur (VVF) : Contacteurs moteur activés dans les sens UP et DOWN. | ◄► (Choix) | Traction Hydraulique Dir Hydraulique S-S Hydraulique Y-D Hydraulique VVF | Traction |
| Nombre de niveaux | Nombre de niveaux de l'installation | ▲▼ (Augmentation/Diminution) | 2 <-> 16 (std.) 2 <-> 32 (BDU uniquement) | 2 |
| Remise à niveau | Non présent : Pas de remise à niveau Type 1 : (porte ouverte ou fermée). Ce réglage est indiqué pour les installations de traction pour une bonne précision d'arrêt. La remise à niveau est déclenchée lorsque la cabine d'ascenseur quitte sa position "parfaitement à niveau", c'est-à-dire lorsqu'un des deux faisceaux s'est interrompu. Le re-nivellement se termine lorsque les deux faisceaux sont libres. ATTENTION : ce réglage ne convient pas aux installations hydrauliques en raison du risque d'effet de "pompage" (la cabine d'ascenseur dérive vers le bas après l'arrêt). Type 2 : (ouvrir ou fermer la porte). Ce réglage est indiqué pour les installations hydrauliques et fonctionne comme le type 1, sauf que les deux poutres doivent être interrompues avant le début de la remise à niveau. La remise à niveau se termine lorsque les deux poutres sont libres. ATTENTION : il est conseillé d'utiliser des capteurs avec une distance réduite entre les faisceaux (TMS03 = 20 mm). Type 3 : Mise à niveau 1 poutre porte ouverte 2 poutre porte fermée. Ce réglage permet la mise à niveau de 1 faisceau, niveau porte ouverte (lumière de la cabine d'ascenseur allumée) et la mise à niveau de 2 faisceaux, niveau porte fermée (lumière de la cabine d'ascenseur éteinte). AVERTISSEMENT : pour faire fonctionner la porte niveleuse ouverte, quelle que soit l'option choisie, il est nécessaire de shunter la sécurité de la porte, en utilisant un système approuvé. Note : avec le système de positionnement Encoder, la distance d'activation de la mise à niveau est affichée. | ◄► (Choix) | Non présent Type 1 Type 2 Type 3 | Non présent |
| Principal niveau | Position du principal niveau (tous les appels en dessous de ce niveau sont servis uniquement vers le haut (uniquement vers le bas collectif)) | ▲▼ (Augmentation/Diminution) | 0 <-> Niveau Non. | 0 |
| Temps de défaut de vitesse faible | Temps avant l'activation du défaut de basse vitesse (basse vitesse trop longue) | ▲▼ (Augmentation/Diminution) | 7 s <-> 40 s | 7 s |
| Temps de fonctionnement | Temps avant l'activation du défaut de temps de fonctionnement | ▲▼ (Augmentation/Diminution) | 20 s <-> 45 s | 20 s |
| Type d'installation | Type d'installation (Simplex / Multiplex / Multiplex LIGHT) Multiplex LIGHT dispose d'une seule ligne BDU partagée pour deux ascenseurs avec un câblage de sinalization dédié. | ◄► (Choix) | Simplex ; Multiplex ; Multiplex LIGHT | Simplex |
| Configuration du multiplex | Configuration du multiplex : N° d'ascenseur (LN) ; boutons Ligne (PBL) ; Niveaux en multiplex ; Décalage. Pour la description, se référer aux solutions multiplex. | ◄► (Sélectionner le paramètre) ▲▼ (Modifier la valeur) | - N° de l'ascenseur (LN) : 1<->4 - PushButtons Line (PBL) : 0(1 ligne)<->3(4 Lignes) | (LN).(PBL) : 1.0 |
| - Niveaux: 2 <-> 16 [32] - Ofst 0 <-> N° niveaux | Flrs. : 2 Ofst : 0 |
|||
| Multiplex Appel | Dans les installations multiplex, on peut différencier un appel niveau d'un appel à pression longue (plus de 3 secondes) bouton : a) L'installation dont le paramètre "Lift No (LN)" est inférieur (par exemple, s'il s'agit d'une installation en duplex avec une grande cabine pour handicapés et une plus petite, la plus grande doit être réglée sur "1" et l'autre sur "2" ; b) Dans un système de "distribution asymétrique niveau ", l'installation qui peut atteindre le niveau le plus bas/haut. | ◄► (Choix) | Non (0, 1, 2, 3) Oui (0, 1, 2, 3) | Non |
"Menu "Portes
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Portes > |
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Rampe de retour sur | Temps avant l'activation de la rampe de retrait | ▲▼ (Augmentation/Diminution) | 0,1 s <-> 9,9 s | 0,1 s |
| Rampe de recul désactivée | Temps avant la désactivation de la rampe de retrait | ▲▼ (Augmentation/Diminution) | 0,1 s <-> 9,9 s | 0,1 s |
| Temps de défaut de verrouillage | Temps avant l'activation du défaut de la serrure | ▲▼ (Augmentation/Diminution) | 2 s <-> 60 s | 15 s |
| Retard d'ouverture de la porte | Temps avant l'ouverture de la porte - pour les portes automatiques | ▲▼ (Augmentation/Diminution) | 0,1 s <-> 9,9 s | 0,5 s |
| Temps de stationnement avec porte ouverte | Temps de stationnement de la cabine de l'ascenseur avec porte ouverte (en sec.) | ▲▼ (Augmentation/Diminution) | 1 s <-> 30 s | 7 s |
| Temps de fermeture avec appels | Temps (en sec.) avant la fermeture de la porte en cas d'appels enregistrés | ▲▼ (Augmentation/Diminution) | 1 s <-> 60 s | 2 s |
| Portes Nb. | Nombre et type de portes | ◄► (Sélection) | 1 porte -2 portes simult. -2 portes sel. 2 portes sel+travers | 1 accès |
| Type Porte A | Sélection du type de porte pour l'entrée A : 1) Manuelle / Non présente : portes manuelles sur niveaux, portes de cabine d'ascenseur manuelles ou non présentes ; 2) Cabine indépendante : portes manuelles sur niveaux, portes de cabine d'ascenseur indépendantes ; 3) Cabine automatique : portes manuelles sur niveaux, portes de cabine d'ascenseur automatiques ; 4) Combiné auto : portes automatiques dans la cabine d'ascenseur et à l'adresse suivante niveaux | ◄► (Sélection) | Manuel / non présent ; Cabine indépendant ; Cabine automatique ; Combiné Auto | Combined Auto |
| Porte A avec interrupteur de fin de course | Présence d'un interrupteur de fin de course pour la porte A (non présent pour les portes manuelles et indépendantes) | ◄► (Sélection) | Non ; Oui (NO) Oui (NC) | Non |
| Sélectionnez la porte A à niveau | Configuration de la porte A pour chaque niveau: paramétrer l'accès à chaque niveau et ouvrir ou fermer le parking de la porte à niveau (pour les portes automatiques) | ◄► (Sélection) ▲▼ (Changement niveau) | Non ; Pkg. Fermeture de porte ; Paquet. Porte ouverte | Pkg. Fermeture de la porte ; |
| Temps d'ouverture/fermeture de la porte A | Porte A sans interrupteur de fin de course : temps d'ouverture/fermeture de la porte | ▲▼ (Augmentation/Diminution) | 1 s <-> 60 s | 10 s |
| Retard de démarrage de la porte A | Manuel de la porte A : temps avant le démarrage | ▲▼ (Augmentation/Diminution) | 0,1 s <-> 9,9 s | 2,0 s |
| Porte A glissante | Porte A avec interrupteur de fin de course : temps avant défaut de glissement | ▲▼ (Augmentation/Diminution) | 1 s <-> 60 s | 10 s |
| Porte A alimentée | Porte A alimentée pendant la course. Non pris en compte pour les portes manuelles ou indépendantes | ◄► (Sélection) | Non Oui Oui AT40 | Non |
| Type Porte B | Sélection du type de porte pour l'entrée B (voir Type Porte A) : | ◄► (Sélection) | Manuel / non présent ; Cabine indépendant ; Cabine automatique ; Combiné Auto | Combined Auto |
| Porte B avec interrupteur de fin de course | Présence d'un interrupteur de fin de course pour la porte A (non présent pour les portes manuelles et indépendantes) | ◄► (Sélection) | Non ; Oui | Non |
| Sélectionnez la porte B à niveau | Configuration de la porte A pour chaque niveau: paramétrer l'accès à chaque niveau et ouvrir ou fermer le parking de la porte à niveau (pour les portes automatiques) | ◄► (Sélection) ▲▼ (Changement niveau) | Non ; Pkg. Fermeture de porte ; Paquet. Porte ouverte | Pkg. Fermeture de la porte |
| Temps d'ouverture/fermeture de la porte B | Porte B sans interrupteur de fin de course : temps d'ouverture/fermeture de la porte | ▲▼ (Augmentation/Diminution) | 1 s <-> 60 s | 10 s |
| Retard de démarrage de la porte B | Manuel de la porte B : temps avant le démarrage | ▲▼ (Augmentation/Diminution) | 0,1 s <-> 9,9 s | 2,0 s |
| Porte B qui glisse | Porte B avec interrupteur de fin de course : temps avant défaut de glissement | ▲▼ (Augmentation/Diminution) | 1 s <-> 60 s | 10 s |
| Porte B alimentée | La porte B est alimentée pendant la course. Non pris en compte pour les portes manuelles ou indépendantes | ◄► (Sélection) | Non Oui Oui AT40 | Non |
| Ouverture avancée | Paramètre d'ouverture avancée de la porte (l'ouverture commence avant l'arrêt de la cabine d'ascenseur). | ◄► (Sélection) | Non ; Oui | Non |
| Type de cellule photoélectrique | Paramètre permettant de sélectionner le type de photocellule : Photocellule NO : le contact s'ouvre si le faisceau est libre. Le contact se ferme si le faisceau est interrompu. Les contacts du choc, de la photocellule et de la porte ouverte doivent être câblés en parallèle. Photocellule NC : opposé de la photocellule NO. Les contacts de la cellule photoélectrique et de la porte ouverte doivent être câblés en série. REMARQUE : les contacts de la cellule de choc, de la cellule photoélectrique et de la porte ouverte doivent tous être du même type (NO ou NC). | ◄► (Sélection) | NO ; NC | Non |
| Temps de contact de la porte | Temps d'attente avant de commencer un voyage (pour le contact de sécurité de l'ancienne porte) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,1 s |
"Signalisations" Menu
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Signalisations > |
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Cabine priorité | Temps de la cabine de l'ascenseur à niveau sans direction avant de prendre les appels d'atterrissage. En cas de portes automatiques combinées, le chronométrage commence lorsque les portes sont fermées et que les contacts de choc, de photocellule et de réouverture ne sont pas activés. | ▲▼ (Augmentation/Diminution) | 2 s <-> 30 s | 10 s |
| Niveau enregistrement des appels | Définir le clignotement des boutons niveau lors de l'enregistrement | ◄► (Sélection) | Permanent ; Clignotant à niveaux | Permanent |
| Sortie AUX | Sélection du type de sortie sur les cartes 16 relais. NOTE : les configurations 1 fil/niveau et 1 fil/niveau HYD sont disponibles uniquement sur la première carte 16RL. Après la configuration des deux cartes AUX, il est possible de régler les sorties sur les BDU (OUT-1 et OUT-2). | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1 fil par niveau; Cabine à niveau; Niveau lumière ; Indicateur gris ; Indicateur 9 segm ; L'ascenseur arrive ; 1 fil par niveau HYD | 1 fil par niveau |
| Entrées des EDR Type 0 = Cabine à niveau et hors service Type 1 = Flèches Type 2 = Cabine à niveau et Cabine arrive Type 3 = Afficheur à 3 fils | Type 0 Type 1 Type 2 Type 3 | Type 0 | ||
| Désignation automatique de niveau | Réglage automatique des caractères numériques pour les indicateurs de position en série. La valeur augmente/diminue automatiquement à chaque niveau à partir de Lowest niveau | ▲▼ (Augmentation/Diminution) | -9 <-> 30 | Niveau le plus bas : 0 |
| Manuel niveau désignation | Réglage manuel des caractères alphanumériques pour les indicateurs de position en série. Le réglage doit être effectué pour chaque niveau | ◄► (Sélection) ▲▼ (Modification de la valeur) | - ; 0 <-> 9 ; A <-> Z | |
| Déclenchement sur PV | Il est possible de démarrer le déclenchement (synthétiseur vocal / flèces de prochain départ) au point de décélération (Oui) ou à l'arrivée de niveau (Non). | ◄► (Sélection) | Non oui | Non |
| flèces de prochain départ | En cas d'activation du paramètre, les sorties de la flèche ne sont activées que lorsque l'ascenseur s'arrête sur niveau (ou lors du ralentissement si le paramètre de déclenchement sur PV est actif). | ◄► (Choix) | Non oui | Non |
| Retard du LTMP | Cette fonction gère le délai entre l'appel d'une cabine d'ascenseur ( niveau) et l'allumage de la lumière. La sortie est désactivée XX secondes après que l'appel ait été servi. 0 sec signifie qu'aucune temporisation n'est active (lumière allumée) | ▲▼ (Augmentation/Diminution) | 0 s <-> 240 s | 1 sec. |
| Retard de l'EME | Cette fonction gère le délai entre le black out signalisation (IEME) et la commande de sortie (OEME) avant la commutation du système en procédure d'urgence automatique. | ▲▼ (Augmentation/Diminution) | 0 s <-> 30 s | 0 sec. |
| Buzzer 81-21 | Pour l'installation du 81-21 : utilisez le buzzer acoustique du 81-20 (porte de dérivation) sur le dessus de la cabine d'ascenseur comme alarme acoustique lorsque les protections ne sont pas en position active. | ◄► (Choix) | Non oui | Non |
"Menu "Caractéristiques spéciales
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Caractéristiques spéciales > |
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Remise à zéro | Sens de la marche pendant la procédure de réinitialisation | ◄► (Sélection) | 2 s <-> 30 s | 10 s |
| Limites de déplacement en inspection | Valable uniquement pour le système de positionnement FAI/FAS. Paramètres des limites de déplacement en mode inspection. Si le déplacement est programmé au-delà des limites, le site armoire de manœuvre ne permet aucun mouvement au-delà du haut/bas niveaux. | ◄► (Sélection) | Jusqu'à AGB/AGH ; Au-delà de l'AGB/AGH | Jusqu'à AGB/AGH |
| Pompiers | (Se référer à la procédure de programmation des opérations incendie) Type d'opérations des pompiers (si présentes) et paramètres pertinents (niveau et côté d'accès des pompiers, type de contact des clés POM et CPOM) ; choix de la norme applicable pertinente : -) Norme NF P82-207 (France) ; -) EN 81-72 (a) : pas d'interrupteur à clé FF de cabine d'ascenseur ; -) EN 81-72 (b) : avec interrupteur à clé FF de cabine d'ascenseur ; | ◄► (Sélectionner le champ) ▲▼ (Modifier la valeur) | Absent ; NF P82-207 ; EN 81-72 (a) ; EN 81-72 (b) EN 81-73 DM 15/09/2005 (IT) | Non présent |
| Détection d'incendie | Paramètre de détection d'incendie sur niveaux. Lorsqu'un incendie est détecté : - si l'ascenseur se trouve sur un autre site niveau que celui où l'incendie a été détecté, tous les appels enregistrés depuis/vers ce site niveau sont annulés ; - si l'ascenseur se trouve sur au niveau où l'incendie a été détecté, le armoire de manœuvre bloque l'ouverture des portes, ferme les portes (si elles sont ouvertes lors de la détection de l'incendie) et envoie la cabine de l'ascenseur dans un endroit sûr. niveau | ◄► (Sélection) | Non ; Oui | Non |
| Enregistrement du bouton d'arrêt | Le système enregistre le mode hors service (pression sur le bouton STOP). Il est également possible de régler le délai pour éviter un mouvement simultané dans les installations alimentées par un générateur. | ◄► (Sélection) | Non ; Oui | Non |
| EN 81-20 | Réglage du système selon la norme EN 81-20 | ◄► (Sélection) | Non ; Oui | Non |
| Défaut d'anti-nuisance | Paramètre de détection du défaut anti-nuisance (nombre d'arrêts sans activation de la photocellule après lesquels tous les appels de cabine d'ascenseur sont annulés). | ◄► (Sélection) ▲▼ (Pas d'appels) | Non ; Oui 2 <-> 10 | Non 3 |
| Hors service niveau | Niveau pour la mise hors service. Parking niveau lorsque l'entrée HS est activée. | ▲▼ (Augmentation/Diminution) | 0 <-> Niveau Non : | 0 |
| Retour automatique | Paramètres pour le retour automatique de la cabine d'ascenseur sur niveau: Retour niveau et Temps d'attente minimum avant le retour automatique | ◄► (Sélectionner le paramètre) ▲▼ (Modifier la valeur) | Non 0 <-> Niveau Non : 1 min <-> 60 minutes | Non 0 15 min. |
| Zones de retour | Paramètres avancés pour le retour sur niveau aux heures/jours prévus : -) Jour (0 = tous les jours, 1 = lundi ... 7 = dimanche) ; -) Intervalle de temps sélectionné (4 intervalles par jour) ; -) Retour niveau; -) Heure de début ; -) Heure de fin (durée maximale : 7h 45 min) ; | ◄► (Sélectionner le paramètre) ▲▼ (Modifier la valeur) | ||
| Chronométrage de la zone R. | Timing pour les zones de retour sélectionnées | ◄► (Sélection) ▲▼ (Modification de la valeur) | Non ; Oui 1 s <-> 120 s | Non 60 s |
| Appeler l'effacement à niveau | Effacement de tous les appels sur niveau où la cabine d'ascenseur s'arrête, sans contrôle de la direction (seulement pour les installations collectives complètes) | ◄► (Sélection) | Non ; Oui | Non |
| Contrôle de la dérive (FR) | Contrôle de la dérive (France) | ◄► (Sélection) | Absent ; Entraînement de traction ; Machine à tambour | Aucun |
| bouton code | Il permet de programmer un code à 4 chiffres pour les appels de cabine d'ascenseur. Un code à 4 chiffres peut être attribué à chaque entrée de bouton de cabine d'ascenseur BCx, correspondant aux entrées des boutons poussoirs de cabine d'ascenseur. Exemple : si le bouton poussoir BC0 est associé au code 0123, pour réserver niveau 0 de la cabine vous pouvez : a) maintenir le bouton poussoir niveau 0 enfoncé pendant 3 secondes. b) Tous les boutons poussoirs COP clignoteront. c) Appuyer en séquence sur les boutons poussoirs correspondant aux BC0, BC1, BC2, BC3 ; Note : Entrez un code entre 0 et 9 correspondant aux entrées BC0 ÷ BC9. Le code de programmation "0" activera la fonction spéciale Pent House. | ◄► (Sélectionner le champ) ▲▼ (Modifier la valeur) | ||
| Contrôle de la température ambiante | Vérifier la température dans la salle des machines par le biais du capteur (si présent). Si la température dépasse les seuils fixés pendant plus de 30 secondes, le système s'arrête au niveau et l'erreur est enregistrée. Le contrôle n'est actif qu'en fonctionnement normal ou en priorité cabine. Après avoir réglé les deux seuils, en appuyant sur Enter, vous pouvez effectuer l'étalonnage du capteur (appuyez immédiatement sur Enter pour conserver l'étalonnage actuel, sinon réglez la valeur de la température ambiante et appuyez ensuite sur Enter). Le premier seuil peut être réglé entre -10 ° C et +5 ° C tandis que le deuxième seuil peut être réglé entre +40 ° C et +75 ° C. | ◄► (Sélectionner le champ) ▲▼ (Modifier la valeur) | Without; +5°C <=> +40°C | Sans |
| Automatique Appels | Lorsque l'ascenseur est en mode normal, la fonction "Appels automatiques" peut être activée pour effectuer un numéro d'appel spécifique (jusqu'à 120 appels ou illimité) par paliers d'une minute. Il est toutefois possible d'activer ou non la fonctionnalité des portes (le système continuera également à accepter les appels niveau simulant des appels programmés, s'ils sont activés). La fonction se termine automatiquement lorsque les machines sont éteintes ou si le système est mis en mode inspection. | ▲▼ (Augmenter/Diminuer) ◄► (Sélectionner les portes) | 0 <-> 120 ∞ 10 <-> 60 s Oui - Non | 0 60s Oui |
| Moniteur UCM | Modification A3. Configurer le type de moniteur. Pour la description, se référer au circuit UCM. | ▲▼ (Augmenter/Diminuer) ◄► (Choix) | ||
| UCM | Installation de type 81-1 / 81-20 / 81-21 gaine procédure d'accès et protections. Pour la description, se reporter au circuit UCM. | ▲▼ (Augmenter/Diminuer) ◄► (Choix) | ||
| Arrêt forcé | Si elle est programmée, l'installation s'arrêtera à un niveau spécifique à chaque croisement (certains hôtels utilisent cette fonction). | ▲▼ (Augmenter/Diminuer) ◄► (Choix) | ||
| Protéger niveau | Si une protection niveau est programmée, lorsque la cabine de l'ascenseur atteint le niveau, la porte ne s'ouvre pas, mais le moniteur montre les images provenant de la caméra correspondant à ce niveau. Les portes ne peuvent être ouvertes qu'en appuyant sur le bouton OUVRIR LA PORTE ; si cela ne se produit pas, l'ascenseur se déplace vers le niveau précédent et arrête ensuite le mode protégé niveau (ce mode de fonctionnement n'est possible qu'avec le système de surveillance de DMG). | ▲▼ (Augmenter/Diminuer) ◄► (Choix) | ||
| Priorité au lop | Activation de la fonction d'appel prioritaire niveau . jumelage avec la carte 16 IN (ou les entrées clés du BDU) | ◄► (Choix) | Non ; Oui | Non |
| Activer niveau | Activation de la fonction de validation de l'appel (ex. : lecteur de carte). En combinaison avec la carte 16 IN. Type 1 : Validation LOP : pour valider les appels, l'entrée correspondante de la carte 16 IN doit être fermée. Type 2 : Validation COP : pour permettre les appels, l'entrée correspondante de la carte 16 IN doit être fermée. Type 3 : Activation COP + LOP : pour activer les appels, l'entrée correspondante de la carte 16 IN doit être fermée (désactivation du niveau) | ▲▼ (Augmenter/Diminuer) ◄► (Choix) | Non Type 1 Type 2 Type 3 | Non |
| gaine Protection | Protection du compartiment et des portes. Pour une description, reportez-vous à gaine protection. | ▲▼ (augmentation/diminution) | Non Type 1 Type 2 Type 3 Type 4 | Non |
| Pesée de charge intégrée | Activer la fonction de pesage intégré de la charge. Une procédure d'étalonnage est obligatoire(Test 22). | ◄► (Sélectionnez un champ) | Non ; Oui | Non |
"Menu "Positionnement du système
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Positionnement > |
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Système de positionnement | Type de système de positionnement : avec encodeur ou traditionnel. Ne peut être modifié qu'en mode Temporaire. Mode temporaire Note : en cas de codeur absolu et de longueur de gaine supérieure à 65 mètres, changez la résolution du codeur = 2 dans le menu de réglage automatique avant de lancer la procédure d'apprentissage manuel. | ◄► (Sélection) | FAI/FAS ; Codeur dans le sens des aiguilles d'une montre ; Encodeur sens inverse des aiguilles d'une montre Codeur ELGO | FAI/FAS |
| Top PV | Position de la décélération (passage en Petite Vitesse) et nombre d'entrées | ▲▼ (Augmentation/Diminution) | 2 <-> 6 | 5 |
| PV à niveaux | Position de la décélération spécifique pour chaque niveau | ◄► (Top PV) ▲▼ (Niveau choix ) | Short niveau ou 2<->6 0 <-> Non. Niveau | 5 tous niveaux |
| Retard de niveau court | Temps avant la décélération du niveau court (seulement si un niveau court est programmé) | ▲▼ (Augmentation/Diminution) | 0,00 s <-> 2,50 s | 0,00s |
| Top PV 2 Retard | Délai avant le passage à la vitesse intermédiaire | ▲▼ (Augmentation/Diminution) | 0,00 s <-> 2,50 s | 0,00s |
| Direction du retard -BRK | VVVF : Retard entre l'activation du sens de marche et l'ordre de marche (BRK) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Autres |
| OLEO : retard de Star / Delta | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Star/Delta 0,0 s - Autres |
|
| Délai BRK-S | Délai entre l'activation de la commande BRK et la commande de vitesse | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,00 s |
| Retard BRK-Dir. | Délai entre la désactivation de l'ordre de marche et la désactivation du sens de marche (arrivée au piano) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Autres |
| Vitesse d'inspection | Définit la vitesse de déplacement en inspection | ◄► (Sélection) | Basse vitesse ; Vitesse élevée | Basse vitesse |
| Emergency BRK On | Paramètre de modulation de la coupure d'urgence (à modifier uniquement si la carte EME n'est pas présente) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 5,0 s | 0,0s |
| Urgence BRK Off | Paramètre de modulation de la coupure d'urgence (à modifier uniquement si la carte EME n'est pas présente) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 5,0 s | 0,0s |
Tableau des paramètres : (Système de positionnement par codeur) :
| Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|
| Système de positionnement | Type de système de positionnement : avec encodeur ou traditionnel. Remarque : ne peut être modifié qu'en mode Temporary Oper. | ◄► (Sélection) | Codeur dans le sens des aiguilles d'une montre ; Codeur dans le sens inverse des aiguilles d'une montre Codeur ELGO | Encoder Clockwise |
| Autodurcissement | Début de la procédure d'auto-apprentissage de la position niveau . Ne peut être modifié qu'en mode de fonctionnement temporaire. | ◄► (Sélection) | Non ; Oui | Non |
| Niveau Position | Valeur de la position pour chaque niveau | ▲▼ (Augmentation/Diminution) ◄► (Sélection) | ||
| Accel. Temps | Temps d'accélération. Temps nécessaire pour passer de la vitesse de départ à la vitesse de déplacement. | ▲▼ (Augmentation/Diminution) | 1,0 s <-> 5,0 s | 3,0 s |
| Boost de départ | Vitesse de démarrage | ▲▼ (Augmentation/Diminution) | 0 s <-> 10 s | 3 % |
| Coup d'arrêt | Vitesse finale (d'arrêt) | ▲▼ (Augmentation/Diminution) | 0 s <-> 10 s | 4 % |
| Vitesse maximale | Vitesse maximale pendant le trajet | ▲▼ (Augmentation/Diminution) | 5 s <-> 100 s | 100 % |
| Vitesse d'inspection | Vitesse de déplacement en mode inspection | ▲▼ (Augmentation/Diminution) | 5 s <-> 100 s | 50 % |
| Vitesse AGB/AGH | Vitesse de circulation sur les points limites AGB/AGH. Même vitesse adoptée lors des opérations d'urgence | ▲▼ (Augmentation/Diminution) | 1 s <-> 15 s | 10 % |
| Direction du retard -BRK | VVVF : Retard entre l'activation du sens de marche et la commande BRK (départ) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Autres |
| OLEO : retard de Star / Delta | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,5 s - Star/Delta 0,0 s - Autres |
|
| Délai BRK-S | Délai entre l'activation de la commande BRK et le début de la rampe de vitesse analogique. | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Autres |
| Retard BRK-Dir. | Délai entre la désactivation de l'ordre de marche et la désactivation du sens de marche (arrêt sur niveau) | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Autres |
| Emergency BRK On | Paramètre de modulation de la coupure d'urgence | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 5,0 s | 0,0s |
| Urgence BRK Off | Paramètre de modulation de la coupure d'urgence | ▲▼ (Augmentation/Diminution) | 0,0 s <-> 5,0 s | 0,0s |
| Moniteur Encoder | Contient des informations sur : Caractéristiques de l'encodeur, lecture des hauteurs de ralentissement (R1D / R1S), remise à niveau (RRIPD / RRIPS) et arrêt de la cabine (RLD / RLS) où D signifie descente et S signifie montée ; enfin, il contient des informations sur la lecture des hauteurs AGB / AGH et ZP. Note : les hauteurs R1D et R1S peuvent être modifiées en poussant Enter sans répéter la procédure d'auto-apprentissage (pour que la distance de ralentissement soit égale en montée et en descente). | |||
| Zone de la porte | Longueur de la zone de porte ZP en mm |
NOTE : Veuillez consulter le diagramme temporel au à la fin de ce manuel, pour mieux comprendre la signification de certains paramètres.
"Menu "VVVF
Ce menu n'est disponible que lorsqu'un FUJI FRENIC LIFT VVVF est connecté à un tableau de contrôle de l'ascenseur.
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < VVVF > |
| Cod. | Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|---|
| F03 | Vitesse maximale | Vitesse maximale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 150-3600 RPM | 1500 RPM |
| F05 | Tension nominale | Tension nominale du moteur entraîné par le convertisseur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 80-240 V (pour les séries de classe 200V) | 230 V |
| 160-500 V (pour les séries de classe 400V) | 380 V | ||||
| F07 | Acc T1 | Rampe d'accélération (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-99,9 s | 1,8 s |
| F08 | Déc. T2 | Rampe d'accélération (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-99,9 s | 1,8 s |
| F42 | Mode de contrôle | Mode de contrôle | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-1-2 | 0 (Entraînements par engrenages, boucle fermée) 1 (Entraînements sans engrenages, boucle fermée) 2 (Entraînements par engrenages, boucle ouverte) |
| E12 | Acc/déc T5 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E13 | Acc/déc T6 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E15 | Acc/déc T8 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E16 | Acc/déc T9 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.00 - 99.9 s | 1,8 s | |
| C07 | Vitesse de fluage | Vitesse de reptation (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 4,0 Hz (Entraînements par engrenages, boucle ouverte) 2,5 Hz (Entraînements par engrenages, boucle fermée) 1,5 Hz (Variateurs gearless, boucle fermée) |
|
| C10 | Vitesse moyenne | Vitesse du système en mode inspection (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 Hz (Entraînements par engrenages) 10 Hz (Entraînements sans engrenage) |
|
| C11 | Haute vitesse | Haute vitesse pour changement de vitesse en plusieurs étapes (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 50 Hz (Entraînements par engrenages) 20 Hz (Entraînements sans engrenage) |
|
| P01 | Pôles moteurs | Nombre de pôles du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | Voir moteur boite à boutons | 4 (Entraînements par engrenages) 20 (Entraînements sans engrenage) |
| P02 | Capacité nominale du moteur | Puissance nominale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | Voir moteur boite à boutons | Fonction de la taille de l'onduleur |
| P03 | Courbe nominale du moteur | Intensité du courant nominal du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | Voir moteur boite à boutons | Fonction de la taille de l'onduleur |
| P04 | Autotuning du moteur | Réglage automatique des paramètres du moteur (entraînements par engrenages uniquement) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 (2 pour déclencher la procédure d'auto-réglage pour les entraînements par engrenages) | |
| P06 | M-No-Load Curr. | Courant à vide du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | Réglage par autotuning du moteur (Entraînements par engrenages) 0 A (Entraînements sans engrenage) |
|
| P12 | Slip M-Rated | Fréquence de glissement nominale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-15Hz | Réglage par Autotuning du moteur |
| L01 (*) | PG select | Voir le réglage de l'ascenseur VVVF Frenic | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-5 | 0 (Entraînements par engrenages) 4 (Entraînements Gearless avec EnDat Encoder) 5 (Réducteurs avec codeur sin-cos) |
| L02 (*) | Résolution PG | Résolution du codeur d'impulsions (Impulsion/ Tour) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 360-60000 P/R | 1024 (Entraînements par engrenages) 2048 (Entraînements sans engrenage) |
| L19 | Courbe en S 1 | Courbe en S - 1 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L24 | Courbe en S 6 | Courbe en S - 6 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L25 | Courbe en S 7 | Courbe en S - 7 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L26 | Courbe en S 8 | Courbe en S - 8 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L27 | Courbe en S 9 | Courbe en S - 9 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L82 | Retardement du freinage | Délai d'activation de la sortie BRKS | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10,00 S | 0,20 s |
| L83 | Délai d'arrêt du frein | Retard de la désactivation de la sortie BRKS | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10,00 S | 0,10 s |
(*) - Non disponible sur le modèle LM2C Inverters.
| Cod. | Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|---|
| F01 | Commande de vitesse | Sélection des commandes pour la variation de la vitesse | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0=MULTISPEED 1=NR Analogique (non polarisé) non disponible | 0 (avec système de positionnement FAI/FAS) 1 (avec les systèmes de positionnement Encoder) |
| F03 | Vitesse maximale | Vitesse maximale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 150-3600 RPM | 1500 RPM |
| F04 | Vitesse nominale | Vitesse nominale du moteur (Fréquence) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 50 Hz | |
| F05 | Tension nominale | Tension nominale du moteur entraîné par le convertisseur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 80-240 V (pour les séries de classe 200V) | 230 V |
| 160-500 V (pour les séries de classe 400V) | 380 V | ||||
| F07 | Acc T1 | Rampe d'accélération (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-99,9 s | 1,8 s |
| F08 | Déc. T2 | Rampe de décélération (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-99,9 s | 1,8 s |
| F09 | Boost TRQ | Augmentation du couple | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0-5,0 | 0,0 (jusqu'à 7,5 kW et à partir de 30 kW) 0,3 (de 11 kW à 22 kW) |
| F10 | OL électronique | Protection électrique contre les surcharges | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1 - 2 | 2 |
| F11 | Niveau de surcharge | Protection électronique contre la surcharge thermique du moteur (valeur en Ampère égale à la taille du variateur) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1 à 200% du courant nominal | 100 % |
| F12 | Temps de surcharge | Constante de temps thermique | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,5 - 75,0 min. | 0,5 |
| F20 | DC Vitesse du frein | Seuil de fréquence pour l'INJECTION en courant continu | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,2 Hz (Boucle ouverte) 0,0 Hz (Boucle fermée) |
|
| F21 | Niveau de freinage DC | Seuil d'intensité pour l'INJECTION en courant continu | ◄► (Sélection) ▲▼ (Modification de la valeur) | 50 % (boucle ouverte) 0 % (Boucle fermée) |
|
| F22 | Frein à courant continu T | Temps d'INJECTION DC | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,0 s (Boucle ouverte) 0,0 s (Boucle fermée) |
|
| F23 | Vitesse de démarrage | Vitesse de démarrage (en Hz) pour l'onduleur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-150 | 0,50 Hz (Boucle ouverte) 0,00 Hz (Boucle fermée) |
| F24 | Temps de maintien | Temps de maintien du fonctionnement à la vitesse de démarrage pour le convertisseur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10 s | 0,8 s (FAI/FAS) 0,2 s (Codeur) |
| F25 | Vitesse d'arrêt | Vitesse d'arrêt (en Hz) pour l'onduleur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0 Hz (FAI/FAS) 0,1 Hz (Encodeur) |
|
| F26 | Son du moteur | Fréquence de la porteuse | ◄► (Sélection) ▲▼ (Modification de la valeur) | 15 kHz | |
| F42 | Mode de contrôle | Mode de contrôle | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-1-2 | 0 (Entraînements par engrenages, boucle fermée) 1 (Entraînements sans engrenage, boucle fermée) 2 (Entraînements par engrenages, boucle ouverte) |
| F44 | Limiteur de courant | Niveau d'activation du limiteur de courant. % du courant nominal de l'onduleur. Si "Auto", la valeur signifie qu'il n'y a pas de limitation de courant. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 100% <-> 230% ou Auto | 200 % |
| E04 | Commandement X4 | Entrée X4 non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 | |
| E05 | Commandement X5 | Entrée X5 non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 | |
| E06 | Commandement X6 | Entrée X6 non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 | |
| E07 | Commande X7 | Entrée X7 non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 | |
| E08 | Commande X8 | Entrée X8 non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 63 | |
| E10 | Acc/déc T3 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E11 | Acc/déc T4 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E12 | Acc/déc T5 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E13 | Acc/déc T6 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E14 | Acc/déc T7 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E15 | Acc/déc T8 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,8 s | ||
| E16 | Acc/déc T9 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00 -99,9 s | 1,8 s | |
| E20 | Signalisations Y1 | Sortie Y1 (transistor) non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 27 | |
| E21 | Signalisations Y2 | Sortie Y2 (transistor) non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 27 | |
| E22 | Signalisations Y3 | Sortie Y3 (transistor) non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 27 | |
| E23 | Signalisations Y4 | Sortie Y4 (transistor) non utilisée | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 | |
| E30 | Vitesse Arr. Hyst | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,48 Hz (Motoréducteur) 0,1 Hz (Moteur sans engrenage) |
|
| E31 | Vitesse Det.Lev | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | 48,33Hz | |
| E32 | Speed Det Hyst | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,48 Hz (Motoréducteur) 0,1 Hz (Moteur sans engrenage) |
|
| E39 | Niveau RRD | Direction recommandée en cas d'urgence (Non utilisé) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0% | |
| E61 | Entrée analogique 12 | Fonction de l'entrée analogique 12 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-2 | 1 |
| E98 | Commandement FWD | Fonction pour la vis bornier FWD | ◄► (Sélection) ▲▼ (Modification de la valeur) | 98 | |
| E99 | Commande REV | Fonction pour la vis bornier REV | ◄► (Sélection) ▲▼ (Modification de la valeur) | 99 |
| Cod. | Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Limitation du couple en cas d'urgence. Si "OFF", la valeur signifie qu'il n'y a pas de limitation de courant. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0% <-> 100% ou OFF | 0 |
| C02 | BATRY TL T | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0 s | ||
| C03 | Vitesse de la batterie | Vitesse pendant la course d'urgence | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,50 Hz | |
| C07 | Vitesse de fluage | Vitesse de reptation (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 4,0 Hz (Entraînements par engrenages, boucle ouverte) 2,5 Hz (Entraînements par engrenages, boucle fermée) 1,5 Hz (Variateurs gearless, boucle fermée) |
|
| C10 | Vitesse moyenne | Vitesse du système en mode inspection (uniquement avec le système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 25 Hz (Entraînements par engrenages) 10 Hz (Entraînements sans engrenage) |
|
| C11 | Haute vitesse | Haute vitesse pour le changement de vitesse en plusieurs étapes (système de positionnement FAI/FAS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 50 Hz (Entraînements par engrenages) 20 Hz (Entraînements sans engrenage) |
|
| P01 | Pôles moteurs | Nombre de pôles du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | (voir moteur boite à boutons) | 4 (Entraînements par engrenages) 20 (Entraînements sans engrenage) |
| P02 | Capacité nominale du moteur | Puissance nominale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | (voir moteur boite à boutons) | Fonction de la taille de l'onduleur |
| P03 | Courbe nominale du moteur | Intensité du courant nominal du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | (voir moteur boite à boutons) | Fonction de la taille de l'onduleur |
| P04 | Autotuning du moteur | Réglage automatique des paramètres du moteur (entraînements par engrenages uniquement) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 (2 pour déclencher la procédure d'auto-réglage pour les entraînements par engrenages) | |
| P06 | M-No-Load Curr. | Courant à vide du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | Réglage par autotuning du moteur (Entraînements par engrenages) 0 A (Entraînements sans engrenage) |
|
| P07 | M-%R1 | Moteur (%R1) | ◄► (Sélection) ▲▼ (Modification de la valeur) | Réglage par autotuning du moteur (Entraînements par engrenages) 5 % (Entraînements sans engrenage) |
|
| P08 | M-%X | Moteur (%X) | ◄► (Sélection) ▲▼ (Modification de la valeur) | Réglage par autotuning du moteur (Entraînements par engrenages) 10 % (Entraînements sans engrenage) |
|
| P09 | Conduite en M-Slip | Gain de compensation du glissement en pourcentage du glissement nominal (P12) au côtés d'entraînement | 0,0 - 200% | Réglage par Autotuning du moteur | |
| P10 | Freinage M-Slip | Gain de compensation du glissement en pourcentage du glissement nominal (P12) au côtés de freinage | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0 - 200% | Réglage par Autotuning du moteur |
| P11 | M-Slip T | Valeur du temps de compensation du glissement (fixe) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,2 s | |
| P12 | Slip M-Rated | Fréquence de glissement nominale du moteur | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 - 15 Hz | Réglage par Autotuning du moteur |
| P60 | Résistance de l'induit - Rs | ◄► (Sélection) ▲▼ (Modification de la valeur) | Ohm | Selon le tableau Motor MX*** | |
| P62 | Réactance de l'axe q de l'induit - Xs | ◄► (Sélection) ▲▼ (Modification de la valeur) | Ohm | Selon le tableau Motor MX*** | |
| P63 | Tension inductive interphase - E | ◄► (Sélection) ▲▼ (Modification de la valeur) | V | Selon le tableau Motor MX*** | |
| P65 | correction de la saturation magnétique de l'inductance de l'axe q | ◄► (Sélection) ▲▼ (Modification de la valeur) | % | Selon le tableau Motor MX*** | |
| H04 | Temps de réinitialisation automatique | Réinitialisation automatique (Nombre de fois) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 10 | |
| H05 | Réinitialisation automatique int | Réinitialisation automatique (intervalle de réinitialisation) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 5 s | |
| H06 | Ventilateur de refroidissement CTRL | Délai d'arrêt du ventilateur de refroidissement (La valeur Auto signifie qu'il n'y a pas de limite à la commande du ventilateur ; le ventilateur est toujours en marche) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 min. <-> 100 min. ou Auto | 5 min |
| H57 | Courbe en S 11 | Courbe vers S-11 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 - 50% | 20% |
| H58 | Courbe en S 12 | Courbe vers S-12 | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 - 50% | 20% |
| H64 | Temps de maintien du zéro | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0 s (avec le système de positionnement FAI/FAS) 0,8 s (avec les systèmes de positionnement Encoder) |
||
| H65 | Temps de démarrage progressif | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,0 s (avec le système de positionnement FAI/FAS) 0,0 s (avec les systèmes de positionnement Encoder) |
||
| H67 | Temps de maintien de l'arrêt | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00 s (Boucle ouverte) 1,00 s (Boucle fermée) |
||
| H96 | Moniteur de freinage | Activer la surveillance des freins | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-1 | 0 |
| H190 | Commande de moteur UVW | Sequenza fasi uscita motore | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-1 | 1 |
| Cod. | Paramètre | Description | Navigation | Valeurs | Valeur par défaut |
|---|---|---|---|---|---|
| L01 (*) | PG select | Voir le réglage de l'ascenseur VVVF Frenic | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-5 | 0 (Entraînements par engrenages) 4 (Entraînements Gearless avec EnDat Encoder) 5 (Réducteurs avec codeur sin-cos) |
| L02 (*) | Résolution PG | Résolution du codeur d'impulsions (Impulsion/ Tour) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 360-60000 P/R | 1024 (Entraînements par engrenages) 2048 (Entraînements sans engrenage) |
| L03 (*) | P.P.Tuning | Voir le réglage de l'ascenseur VVVF Frenic | ◄► (Sélection) ▲▼ (Modification de la valeur) | ||
| L04 (*) | P.P.Offset | Décalage de la position du pôle magnétique (angle de décalage) pour les entraînements sans engrenage | ◄► (Sélection) ▲▼ (Modification de la valeur) | Réglé automatiquement lors du réglage de la pole position (L03) | |
| L05 (*) | Gain ACR P | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1,5 | ||
| L07 (*) | Sélection automatique de l'accord des pôles | ◄► (Sélection) ▲▼ (Modification de la valeur) | Selon le tableau Motor MX*** | ||
| L19 | Courbe en S 1 | L19 à L28 spécifient les zones de courbe en S à appliquer aux opérations pilotées par des commandes de vitesse à plusieurs étapes avec accélération/décélération en S. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|
| L20 | Courbe en S2 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L21 | Courbe en S 3 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L22 | Courbe en S 4 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L23 | Courbe en S 5 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L24 | Courbe en S 6 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L25 | Courbe en S 7 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L26 | Courbe en S 8 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L27 | Courbe en S 9 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L28 | Courbe en S 10 | 20 % (Entraînements par engrenages) 25 % (Entraînements sans engrenage) |
|||
| L29 | SFO Hold T | Fonctionnement court Niveau (temps d'attente) Utilisé uniquement pour le mode de positionnement FAI-FAS | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00s. <-> 10,00s. ou OFF | OFF |
| L30 | Vitesse de SFO | Fonctionnement court Niveau (vitesse autorisée) - NON UTILISÉ | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00 s | |
| L36 (*) | Gain ASR P élevé | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 10,00 (Entraînements par engrenages) 2,50 (Entraînements sans engrenage) |
|
| L37 (*) | Gain ASR I élevé | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,100 | |
| L38 (*) | Gain ASR P Low | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 10,00 (Entraînements par engrenages) 2,50 (Entraînements sans engrenage) |
|
| L39 (*) | Gain ASR I Low | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,100 | |
| L40 (*) | Switch Speed 1 | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | 5,00 (Entraînements par engrenages) 1,00 (Entraînements sans engrenage) |
|
| L41 (*) | Switch Speed 2 | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | 10,00 (Entraînements par engrenages) 2,00 (Entraînements sans engrenage) |
|
| L42 (*) | Gain ASR-FF | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.000 - 10.000 s | 0.000 s | |
| L55 (*) | TB Heure de début | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.00 - 1.00 s | 0.20 s | |
| L56 (*) | TB Heure de fin | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.00 - 20.00 s | 0.20 s | |
| L64 (*) | TB Digital 3 | ◄► (Sélection) ▲▼ (Modification de la valeur) | -200 - +200 % | 0 % | |
| L65 (*) | Opération ULC | Charge déséquilibrée Compensation | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0-1 | 1 |
| L66 (*) | Activation d'ULC | Compensation de charge déséquilibrée (Temps d'activation) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,01-2 s | 2,00 s |
| L68 (*) | Gain ULC ASR P | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 10 (FAI/FAS) 10 (Encodeur) |
|
| L69 (*) | ULC ASR I gain | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,01 (FAI/FAS) 0,01 (Encodeur) |
|
| L73 (*) | APR P gain zéro | Voir Contrôle du recul et confort de conduite | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 (FAI/FAS) 0 (Encodeur) |
|
| L74 (*) | APR D Gain | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.0 | ||
| L75 (*) | Temps de filtrage | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.000 s | ||
| L76 (*) | ACR P constant | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0.00 | ||
| L80 | Mode de freinage | Mode de sortie de la commande de freinage (BRKS) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 1-2 | 1 |
| L81 | Niveau de freinage | Courant de sortie qui active le BRKS signalisation lorsque L80 = 2. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,-200% du courant à vide du moteur | 100 % |
| L82 | Délai d'activation du frein | Délai d'activation de la sortie BRKS | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10,00 Sec | 0,20 s |
| L83 | Délai d'arrêt du frein | Retard de la désactivation de la sortie BRKS | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-100 Sec | 0,10 s |
| L84 | BRKS vérifie t | Temps autorisé entre la sortie BRKS et l'entrée BRKE (Er6) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10 sec | 0,00 s |
| L99 | ACTION SEL | Non utilisé | ◄► (Sélection) ▲▼ (Modification de la valeur) | ||
| L122 | Del. Op. Puissance d'entrée Niveau de dét. | ◄► (Sélection) ▲▼ (Modification de la valeur) | % | ||
| L124 | Del. Op. Dir. Calc. Delay Timer | ◄► (Sélection) ▲▼ (Modification de la valeur) | s. | ||
| L130 | Diamètre du réa (Ds) | ◄► (Sélection) ▲▼ (Modification de la valeur) | mm | Selon le tableau Motor MX*** | |
| L131 | Diamètre du codeur (Ds) | ◄► (Sélection) ▲▼ (Modification de la valeur) | mm | Selon le tableau Motor MX*** | |
| L132 | Bande de compensation thêta | ◄► (Sélection) ▲▼ (Modification de la valeur) | deg | Selon le tableau Motor MX*** | |
| L133 | Limiteur inférieur du gain de compensation thêta | ◄► (Sélection) ▲▼ (Modification de la valeur) | Selon le tableau Motor MX*** | ||
| L134 | Temps de contrecoup | Temps de jeu (Lorsque L65 = 2) | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0,00-10,00 s | 0 |
| L198 | Interrupteur de réglage 1 | BIT0 = Il est possible de fixer la fréquence de la porteuse à 16 kHz pour toute la gamme de vitesse afin de réduire le bruit de fonctionnement. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 | |
| L199 | Interrupteur de réglage op. 2 | Réservé. | ◄► (Sélection) ▲▼ (Modification de la valeur) | 0 |
(*) - Non disponible sur le modèle LM2C Inverters.
NOTE : Veuillez consulter le diagramme temporel pour mieux comprendre certains paramètres de signification.
"Menu "Paramètres d'enregistrement
Note : la sauvegarde des données n'est pas nécessaire uniquement pour l'émulation de PBV3 armoires de manœuvre.
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Paramètres d'enregistrement > |
| Niveau 0 12:30:56 < Paramètres Rec > | ----- ENTER ----> | Niveau 0 12:30:56 < Rec Paramètres > Paramètres d'enregistrement | ----- ENTER ----> <----- ESC ------ | Niveau 0 12:30:56 < Rec Paramètres > Enregistrer les paramètres Vous êtes sûr ? |
| ▲ ▼ | ENTER ↓ |
|||
| Niveau 0 12:30:56 < Rec Paramètres > Enregistrer les paramètres Fin reg. |
||||
| Niveau 0Étage 0 12:30:56 < Paramètres d'enregistrement > Reset Parameters | ----- ENTER ----> <----- ESC ------ | Niveau 0Étage 0 12:30:56 < Paramètres d'enregistrement > Reset Parameters Vous êtes sûr ? |
||
| ENTER ↓ |
||||
| Niveau 0Étage 0 12:30:56 < Paramètres d'enregistrement > Paramètres de réinitialisation Fin reg. |
||||
"Menu "Horloge
| ----->>>>> | | ----->>>>> | Niveau 0 - 12:30:56 < Horloge > |
- Da = Jour
- Mo = Mois
- Yr = Année
- D = Jour de semaine (1=lundi)
- Hr = Heures
- Mn = Minutes

AVERTISSEMENT : En cas d'arrêt du système, le temps est sauvegardé au moyen d'un super condensateur (jusqu'à 5 jours sans alimentation).
VVVF Frenic Lift Setting
- Procédure de réglage -
Sélectionnez "Menu d'installation".

Dans l'écran apparaîtra :

Confirmez en appuyant sur OK et sélectionnez "Machine / Autotuning VVVF" :
Insérez le paramètre demandé et passez au suivant en appuyant sur la flèche droite.
La liste des paramètres du VVVF est la suivante :
| Paramètre | Description | Moteur sans engrenage | Motoréducteur |
|---|---|---|---|
| P01 - Pôles du moteur | Insérer le numéro du pôle moteur | X | X |
| F03 - Vitesse maximale | Insérer la vitesse maximale du moteur [RPM] (Moteur boite à boutons) | X | X |
| F04 - Courant nominal | Insert Vitesse nominale du moteur [Hz] (Moteur boite à boutons) | X | X |
| F05 - Tension nominale | Insérer la tension nominale du moteur [V]. (Moteur boite à boutons) | X | X |
| P08 - M-%X | Insérer la valeur 10 %. | X | |
| P07 - M-%R1 | Insérer la valeur 5 %. | X | |
| P06 - M-No Load Curr. | Insérer la valeur 0 [A] | X | |
| P03 - Courant nominal du moteur | Insérer le courant nominal [A] (Moteur boite à boutons) | X | |
| P02 - Capacité nominale du moteur | Insérer la puissance nominale [kW] (Moteur boite à boutons) | X | |
| C11 - Haute vitesse | Insérer la haute vitesse [Hz] (Moteur boite à boutons) | X | |
| C10 - Vitesse moyenne | Vitesse moyenne de l'insert [Hz] (Vitesse d'inspection) | X | |
| C07 - Vitesse de fluage | Insérer la basse vitesse [Hz] (10% de C11) | X | |
| L01 - Sélection PG | Définir le type de codeur du moteur : (Cartes en option VVVF) | X | X (*) |
| L02 - Résolution PG | Résolution du codeur du moteur d'insertion | X | X (*) |
(*) Boucle fermée uniquement
Le dernier paramètre est différent selon le type de moteur :
Moteur GEARLESS :
 Select 4 : Tuning statique
Select 4 : Tuning statiqueSelect 5 : Tuning dynamique (seulement si libre de cordes)
Moteur à engrenages :
 Sélectionnez 3
Sélectionnez 3En cas de problème, allez dans le menu Défaut pour identifier le problème (§ Erreurs de réglage du moteur).
au fin de la procédure, appuyez sur le bouton haut/bas et vérifiez la direction correcte du mouvement de la cabine d'ascenseur ; si elle n'est pas correcte, inversez les valeurs des paramètres E98 et E99.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Spécifications du codeur | Carte codeur | Moteur | |
| A/B Canal de sortie | Absolument Signalisations | |||
| 0 | Collecteur ouvert / Push-Pull | = | OPC-PG3 | IM |
| Conducteur de ligne | = | OPC-PMPG | ||
| 1 | Collecteur ouvert / Push-Pull | Z | OPC-PG3 | IM ET PMSM |
| 4 | Sine différentielle (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS ou OPC-PSH | PMSM |
| 5 | Sine différentielle (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Sine différentielle (1Vpp) | BISS-C (Sendix 5873) | OPC-PS ou OPC-PSH | PMSM |
| 7 | Sine différentielle (1Vpp) | SSI (ECN1313) | OPC-PS ou OPC-PSH | PMSM |
| 8 | Sine différentielle (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Code | Description | |
|---|---|---|
| OC1 | Surintensité pendant l'accélération | Le courant de sortie momentané du variateur a dépassé le niveau de surintensité. |
| OC2 | Surintensité pendant la décélération | |
| OC3 | Surintensité pendant le fonctionnement à vitesse constante | |
| EF | Défaut de terre | Le courant homopolaire causé par un défaut de terre dans le circuit de sortie a dépassé la limite autorisée. a dépassé la limite permise. (30kW ou plus) |
| OV1 | Surtension pendant l'accélération | La tension du bus de liaison CC a dépassé le niveau de détection de surtension. de détection de surtension. |
| OV2 | Surtension pendant la décélération | |
| OV3 | Surtension pendant le fonctionnement à vitesse constante | |
| LV | Sous-tension | La tension du bus de liaison CC a chuté en dessous du niveau de détection de sous-tension. age |
| Lin * | Perte de phase d'entrée | Une perte de phase d'entrée s'est produite ou le taux de déséquilibre de la tension interphase était important. était important. |
| OH1 | Surchauffe du dissipateur thermique | La température autour du dissipateur thermique a augmenté anormalement. |
| OH2 | Alarme externe | Le THR d'alarme externe a été saisi. (lorsque le THR "Activation du déclenchement de l'alarme externe" a été affectée à une entrée numérique quelconque bornier) |
| OH3 | Surchauffe interne de l'inverseur | La température à l'intérieur du variateur a dépassé la limite autorisée. |
| OH4 | Protection du moteur (thermistance PTC/NTC) | La température du moteur a augmenté de façon anormale. |
| DBH | Surchauffe du registre de freinage | La température de la résistance de freinage a dépassé la limite autorisée. |
| OL1 | Surcharge du moteur 1 | La protection thermique électronique pour la détection de la surcharge du moteur a été activée. |
| OLU | Surcharge de l'onduleur | La température à l'intérieur de l'IGBT a augmenté anormalement. |
| OS | Prévention des excès de vitesse | La vitesse du moteur est supérieure à la vitesse maximale * L32. |
| PG | Câblage cassé dans le PG | La vitesse du moteur est supérieure à la vitesse maximale * L32. |
| nrb | Erreur de rupture de fil NTC | Détection d'une rupture de fil dans le circuit de détection de la thermistance NTC. |
| Er1 | Erreur de mémoire | Une erreur s'est produite lors de l'écriture de données dans la mémoire du variateur. du variateur. |
| Er2 | Erreur de communication du clavier | Une erreur de communication s'est produite entre la clé et le variateur. pad |
| Er3 | Erreur de CPU | Une erreur du CPU ou une erreur LSI s'est produite. |
| Er4 | Erreur de communication de l'option | Une erreur de communication s'est produite entre la carte d'option connectée carte optionnelle connectée et l'onduleur. |
| Er5 | Erreur d'option | Une erreur a été détectée par la carte optionnelle connectée (pas par le l'onduleur). |
| Er6 | Protection des opérations | Une opération incorrecte a été tentée. |
| Er7 | Erreur de réglage | Le réglage automatique ou le réglage du décalage de la position du pôle magnétique a échoué, ce qui entraîne des résultats de réglage anormaux. |
| Er8 | Erreur de communication RS-485 (port 1) | Une erreur de communication s'est produite pendant la communication RS-485 communication. |
| ErP | Erreur de communication RS-485 (port 2) | |
| OPL | Perte de phase en sortie | Une perte de phase de sortie s'est produite. |
| ErE | Désadaptation de la vitesse | La vitesse de référence et la vitesse de détection sont différentes. |
| ErF | Erreur de sauvegarde des données en cas de sous-tension | Lorsque la protection contre les sous-tensions a été activée, l'onduleur n'a pas réussi à sauvegarder les données. n'a pas réussi à sauvegarder les données, affichant cette erreur. |
| ErH | Erreur matérielle | Le LSI de la carte de circuit imprimé d'alimentation a mal fonctionné à cause du bruit, etc. |
| Ert | Erreur de communication CAN ouverte | Une erreur de communication s'est produite pendant la communication CANopen. |
| ECF | EN1, EN2 borniers erreur de circuit | Une anomalie a été diagnostiquée dans le circuit EN1, EN2 borniers . |
| Ot | Courant de surcouple | Le courant du couple de référence est devenu excessif. |
| DBA | Transistor de freinage cassé | Détection d'une anomalie dans le transistor de freinage |
| bbE | Confirmation des freins | Le convertisseur détecte un décalage entre la commande de frein signalisation et la détection de frein (retour) signalisation. |
| Eo | EN1, EN2 borniers bavardage | Collision détectée entre la sortie ENOFF et l'entrée EN1/EN2 borniers. |
| ECL | Erreur logique personnalisable | Une erreur de configuration de la logique personnalisable a provoqué une alarme. |
| OH6 | Surchauffe de la résistance de charge | La température de la résistance de charge à l'intérieur de l'onduleur a dépassé la limite autorisée. onduleur |
| rbA | Sauvetage par alarme de freinage | Aucun mouvement n'a été détecté pendant l'opération de sauvetage par la commande de frein. |
| tCA | Atteindre le nombre maximal de compteur | Le nombre de changements de sens de marche a atteint le niveau prédéfini. |
| SCA | Erreur de contrôle de court-circuit | Le variateur détecte le décalage entre la commande de court-circuit commande de court-circuit signalisation et la détection de court-circuit (retour) signalisation. |
| LCO | Surcharge du capteur de charge | La fonction de cellule de charge a détecté une situation de surcharge au moyen de d'un niveau prédéfini. |
| Code | Nom de l'alarme | Sous-code | Description |
|---|---|---|---|
| OC1 | Surintensité pendant l'accélération | 1 | Protection contre les surintensités (interruption OCT) - Surintensité normale |
| 2 | Protection contre les surintensités (interruption OCL) - Surintensité normale | ||
| OC2 | Surintensité pendant la décélération | 3 | Protection contre les courts-circuits - Surintensité au démarrage |
| 4 | Protection contre les défauts à la terre - Surintensité au démarrage | ||
| OC3 | Surintensité pendant la vitesse constante | 5 | Détection signalisation panne (FAULT signalisation) - Circuit de porte |
| 11 | Détection signalisation panne (OCT signalisation) - Circuit de détection (PPCB) | ||
| 12 | Détection signalisation panne (OCL signalisation) - Circuit de détection (PPCB) | ||
| OV1 | Surtension pendant l'accélération | 1 11 | Protection contre les surtensions (OVT signalisation) Détection de la défaillance de signalisation (OVT signalisation) |
| OV2 | Surtension pendant la décélération | ||
| OV3 | Surtension pendant la vitesse constante | ||
| Lin | Perte de phase d'entrée | 1 | Détection du niveau de protection de la diode redresseuse |
| 2 | Détection du niveau de tolérance en fonctionnement continu | ||
| OPL | Perte de phase en sortie | 1 | |
| OH1 | Surchauffe des ailettes de refroidissement | 1 | Surchauffe des ailettes de refroidissement (NTC2) |
| 3 | Surchauffe du convertisseur (NTC4) | ||
| 11 | Déconnexion de la thermistance (NTC2) | ||
| OH2 | Défaut externe | 0 | Protection par la THR |
| OH3 | Surchauffe à l'intérieur de l'onduleur | 0 | Surchauffe de l'air interne (NTC1) |
| OH4 | Protection du moteur (thermistance CTP) | 1 | Thermistance CTP |
| 2 | Thermistance NTS | ||
| OH6 | Surchauffe de la résistance de charge | 1 | Surchauffe de la résistance de charge Sauf pour FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Déconnexion de la thermistance (NTC3) | ||
| OL1 | Surcharge du moteur | 0 | Détection de courant électronique thermique |
| LV | Sous-tension | 1 | Une sous-tension se produit pendant l'activation de la porte |
| 11 | Niveau minimum de fonctionnement de la batterie | ||
| dbH | Surchauffe de la résistance DB | 0 | Surchauffe de la résistance DB (F50 <-> F52) |
| 1 | Transistor DB 2sec_ON en continu (R erroné trop élevé) | ||
| dbA | Détection de la défaillance du transistor DB | 0 | Détection de la défaillance du transistor DB |
| Er1 | Erreur de mémoire | 0x0001 | Destruction de l'historique des alarmes |
| 0x0002 | Code de fonction standard | ||
| 0x0004 | Code de la fonction utilisateur | ||
| 0x0008 | Code de fonction caché | ||
| 0x0010 | Erreur de zone de programme | ||
| 0x0040 | Erreur de lecture (nouvelle tentative) | ||
| 0x0080 | Erreur d'écriture (nouvelle tentative) | ||
| 0x0100 | Zone étendue | ||
| 0x1000 | Zone de valeur de réglage | ||
| Er2 | Erreur de communication du panneau du clavier | 1 | Détection de déconnexion |
| Er3 | Erreur de CPU | 1 | Redémarrage du traitement par le CPU |
| 1000 | Erreur de somme de contrôle du code de fonction (erreur de RAM) | ||
| 0x0001 | Erreur de code de fonction standard | ||
| 0x0002 | Erreur de code de fonction cachée (code u) | ||
| 0x0004 | Erreur de code de fonction cachée (code n) | ||
| 0x0008 | Erreur de code de fonction de la vanne de réglage | ||
| 0x0010 | Zone étendue | ||
| 2000 | Erreur de cycle fixe | ||
| 0x0001 | Erreur de cycle L1 | ||
| 0x0004 | Erreur de cycle L3 | ||
| 0x0008 | Erreur de cycle L4 | ||
| 0x0020 | Erreur de cycle L6 | ||
| 0x0080 | Erreur de cycle LP | ||
| 3000 | Coupure injuste | ||
| 5001 | Entrée RST extérieure | ||
| 7001 | Destruction de la surface de la pile | ||
| 9000 | Détection des défaillances logicielles | ||
| 0x0200 | Alarme QUE sur | ||
| Er4 | Erreur de communication de l'option | 1 | Erreur de communication du port A Il n'y a pas d'option |
| 3 | Erreur de communication Port C | ||
| 10 | Un excès d'option installée Il n'y a pas d'option |
||
| Er5 | Erreur d'option | 0 | Option in-match |
| 1 | Achèvement signalisation ON (Il n'y a pas d'option) | ||
| 10 | Erreur EEPROM AIO PT (Il n'y a pas d'option) | ||
| 26 | Erreur d'information de position PR-PP (uniquement OPC-PMPG+L01=2) | ||
| 27 | Erreur de démarrage de l'information sur la position du PP | ||
| 50 | Pas de zone de sauvegarde | ||
| 51 | Erreur de commande de communication | ||
| 52 | Erreur de code de distinction | ||
| 53 | Erreur de somme de contrôle | ||
| 54 | Erreur d'écriture | ||
| Er6 | Erreur dans la procédure d'opération | 2 | Contrôle de départ |
| 7 | Erreur d'affectation des vitesses multiples | ||
| 8 | Contrôle des freins (temps d'attente dépassé) | ||
| 9 | |||
| 10 | Pas d'essai de réglage de la position du pôle magnétique | ||
| 11 | Erreur de confirmation du contacteur côté sortie | ||
| 12 | Manque de vitesse d'évaluation | ||
| 14 | Défaut de freinage (erreur assignée) | ||
| 15 | Court-circuit (erreur attribuée par le SCC) | ||
| 16 | Erreur de sauvetage |
| Code | Nom de l'alarme | Sous-code | Description |
|---|---|---|---|
| Er7 | Réglage du moteur à induction | 1 | Erreur d'affectation des vitesses multiples |
| 2 | Erreur de phase R1 | ||
| 3 | Erreur %X | ||
| 6 | Erreur de courant de sortie | ||
| 7 | Commande d'entraînement OFF | ||
| 9 | BX bornier ON | ||
| 11 | Détection de sous-tension (LV) | ||
| 15 | Une alarme se produit | ||
| 16 | Changement de commande de l'entraînement | ||
| 19 | Autres | ||
| 21 | Erreur I0 | ||
| 24 | FR bornier | ||
| 25 | DRS bornier | ||
| Er7 | Au réglage du gain de détection actuel | 32 | Er erreur d'écriture de l'EEPROM |
| 37 | Touche STOP_ON | ||
| Er7 | Réglage du décalage de la position du pôle magnétique | 51 | Tuning sans moteur |
| 52 | Erreur dans le résultat du réglage de la position du pôle magnétique | ||
| 53 | F42 manque de réglage | ||
| 54 | L04 non conforme | ||
| Er7 | Réglage de l'offset de détection du courant | 61 | Er erreur d'écriture de l'EEPROM |
| 62 | Touche STOP_ON | ||
| Er7 | Erreur de réglage du moteur synchrone | 5058 | Erreur de résistance d'amorçage (limite inférieure) |
| 5059 | Erreur de résistance d'amorçage (limite supérieure) | ||
| 5060 | Erreur Ld (limite inférieure) | ||
| 5061 | Erreur Ld (limite supérieure) | ||
| 5062 | Erreur Lq (limite inférieure) | ||
| 5063 | Erreur Lq (limite supérieure) | ||
| 5080 | Erreur de gain ACR (limite supérieure) | ||
| 5081 | Erreur de gain ACR (limite inférieure) | ||
| Er8 | Erreur de communication RS485 | 0 | CH1 Erreur de communication RS485 |
| nrb | Détection de déconnexion par thermistance NTC | 0 | Détection de déconnexion par thermistance NTC |
| OS | Survitesse | 0 | Protection contre la survitesse |
| pg | Erreur de PG | 1 | Détection de déconnexion par le matériel |
| 2 | Détection de la déconnexion de la phase Z par logiciel | ||
| 50 | Option - Détection de déconnexion de la phase A/B (Sin) | ||
| 51 | Option - Détection de déconnexion de la phase C/D (Sin) | ||
| 52 | Option - Détection de déconnexion de la phase R (Sin) | ||
| 53 | Option - Détection de la déconnexion de la phase A/B (impulsion) | ||
| 54 | Option - Détection de déconnexion de la phase Z (impulsion) | ||
| 55 | Option - Détection de la déconnexion des phases (impulsions) U/V/W | ||
| 60 | Option - délai d'attente pour le chien de garde | ||
| 61 | Option - temps de réponse du codeur série | ||
| 62 | Option - Erreur CRC de communication de l'unité centrale | ||
| 63 | Option - Erreur de communication de l'unité centrale | ||
| 70 | Option - Erreur de sortie ABZ | ||
| 71 | Option - codeur sériel chaque alarme | ||
| 72 | Option - erreur d'accès à la mémoire | ||
| 73 | Option - erreur de culpabilisation | ||
| 80 | Option - Erreur de paramétrage de la carte PG | ||
| ErE | Inadéquation de la vitesse (excès d'écart de vitesse) | 1 | Les marques de commande de vitesse et de détection de vitesse diffèrent |
| 3 | Ecart de vitesse excessif (détection de la vitesse > commande de la vitesse) | ||
| 5 | La détection de la vitesse continue d'être 0 | ||
| 7 | Ecart de vitesse excessif (détection de vitesse < commande de vitesse) | ||
| ErF | Erreur de sauvegarde des données en cas de sous-tension | 0 | Erreur de sauvegarde des données en cas de sous-tension |
| ErP | RS485 2ch erreur de communication | 0 | CH2 Erreur de communication RS485 |
| Ert | Erreur de communication CAN | 1 | Bus-off |
| 2 | Détection du délai de garde | ||
| OLU | Surcharge de l'onduleur | 1 | Protection des IGBT |
| 2 | Thermique de l'onduleur Seulement FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | Erreur de circuit EN | 10 | Erreur d'entrée EN (_EN1A=L, EN2A=L) |
| 11 | Erreur d'entrée EN (_EN1A=H, EN2A=H) | ||
| 5000 | Erreur du circuit de diagnostic | ||
| 5010 | Panne d'alimentation du P5S | ||
| 5020 | Diagnostic de l'unité centrale : Diagnostic du réglage du port | ||
| 5030 | Diagnostic de l'unité centrale : Diagnostic de la ROM | ||
| 5040 | Diagnostic du CPU : Diagnostic de la RAM | ||
| 5050 | Diagnostic de l'unité centrale : moniteur de séquence | ||
| ECL | Dysfonctionnement de la logique de personnalisation | 0 | Erreur de logique de personnalisation |
| Err | Défaillance simulée | 9998 | Défaillance simulée |
| Ot | Erreur de couple excessif | 0 | Erreur de couple excessif |
| bbE | Erreur de frein mécanique | 11 | Erreur du frein 1 |
| 12 | Erreur BRAKE 2 | ||
| Eo | FR bornier erreur | 0 | FR bornier erreur |
| rbA | Erreur de détection de la vitesse de sauvetage | 0 | Erreur de détection de la vitesse de sauvetage |
| tCA | Arrivée de la limite du commutateur de direction | 0 | Arrivée de la limite du commutateur de direction |
| SCA | Erreur de court-circuit | 0 | Erreur de court-circuit |
| Lco | Erreur de cellule de charge | 0 | Erreur de cellule de charge |
| EF | Protection du sol | 0 | Courant triphasé Seulement FRN0060LM2A-4 <-> FRN0091LM2A-4 |
Dans les vieux moteurs, l'autocalibrage peut échouer : dans ces cas, l'autocalibrage de type 1 (au point 10, sélectionnez P04 = 1) peut être exécuté, mais dans ce cas, les valeurs P06 et P12 doivent être entrées manuellement.

Les valeurs typiques de P06 se situent entre 30% et 70% de P03.
 F.r. = Fréquence nominale
F.r. = Fréquence nominaleS.s. = Vitesse synchrone
S.r. = Vitesse nominale
Les valeurs acceptables de P12 sont comprises entre 0,5 et 5 Hz.
Par exemple, pour un moteur à 4 pôles, la fréquence nominale est de 50 Hz, la vitesse synchrone est de 1500 tr/min et la vitesse nominale figure sur la plaque signalétique du moteur (toujours en tours par minute).
moteur GEARLESS
En cas de problème, le MENU ERREURS affiche "Error 52 = er7 Error VVVF". Dans ce cas, veuillez vérifier les connexions de l'encodeur du moteur, effacer les erreurs dans le menu "Erreurs" et répéter la procédure de réglage à partir du point 14.
Après la procédure de réglage, essayez de déplacer l'ascenseur en maintenance de haut en bas pendant quelques tours de moteur. S'il se déplace correctement, la procédure est terminée, sinon, en cas d'erreur du VVVF (ere ou Ocx ou Os), inverser les deux phases du moteur en modifiant le paramètre H190 du VVVF, effacer les erreurs dans le menu "Fault" et répéter la procédure de poletuning.
Instructions pour la mise à jour du logiciel
Nom du fichier .PP2 ou .PP4
Insérez le périphérique USB dans la fente, en attendant le message comme dans la Figure 1.
 (Figure 1)
(Figure 1)Sélectionnez "Put a file into PlayPad" (par défaut), appuyez sur le bouton OK. La fenêtre se transforme en Figure 2.
 (Figure 2)
(Figure 2)Suivez les instructions à l'écran et sélectionnez le fichier .PP2/4 (dans l'exemple PLP2_2.PP2) et appuyez sur OK. La fenêtre se transforme en Figure 3
 (Figure 3)
(Figure 3)Appuyez sur OK pour confirmer le processus de mise à jour. La fenêtre se transforme en Figure 4
 (Figure 4)
(Figure 4)au fin de la procédure, vous devez retirer la clé USB (la figure 5 ou la figure 6 apparaîtra).
 (Figure 5)
(Figure 5) (Figure 6)
(Figure 6) (Figure 7)
(Figure 7)La fenêtre se transforme en Figure 8.
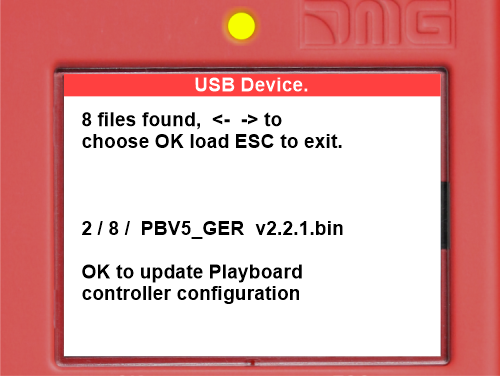 (Figure 8)
(Figure 8)Suivez les instructions à l'écran, sélectionnez le fichier *.bin et appuyez sur OK. La fenêtre se transforme en Figure 9.
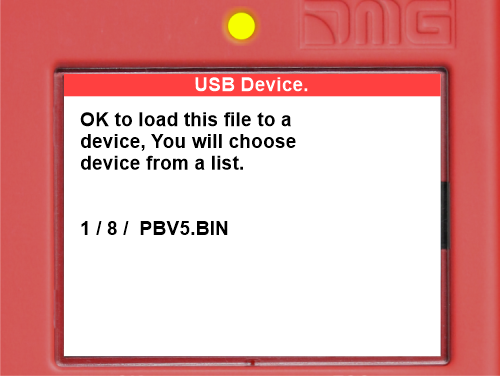 (Figure 9)
(Figure 9)Appuyez sur OK pour confirmer le processus de mise à jour. La fenêtre se transforme en Figure 10, attendez un moment.
 (Figure 10)
(Figure 10)Sélectionnez le dispositif (ou le groupe de dispositifs) à mettre à jour et appuyez sur OK (Figure 11).
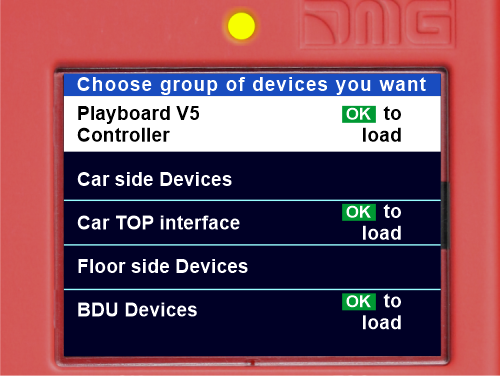 (Figure 11)
(Figure 11)La fenêtre se transforme en figure 12 : attendez que le processus soit terminé. Si vous devez appuyer sur une touche fléchée pour allumer le rétroéclairage.
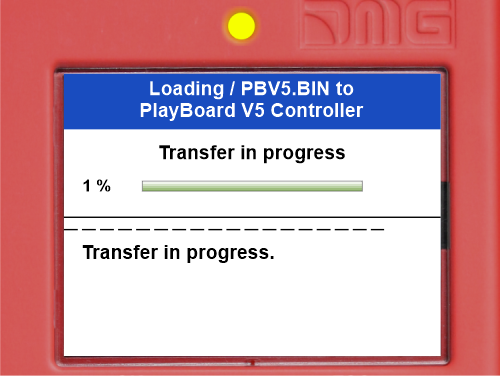 (Figure 12)
(Figure 12)Lorsque le processus se termine (Figure 13), appuyez sur le bouton Esc jusqu'à ce que la fenêtre affiche "Please remove USB Device" (Figure 14).
 (Figure 13)
(Figure 13) (Figure 14)
(Figure 14)| Dispositif | Temps nécessaire à la mise à jour du logiciel |
|---|---|
| Carte mère (Playboard armoire de manœuvre) | 3 minutes |
| PlayPad 4.0 | 1 minute |
| Carte TOC (Cabine TOP Interface) | 1 minute |
| Carte DMCPIT (Cabine COP Interface) | 1 minute |
| Interfaces de boutons-poussoirs en série (dispositifs BDU) | 30 secondes |
| Cartes d'extension (PIT8 / 16RL / 16IO) | 30 secondes |
(Tableau III.1 - Calendrier de la mise à jour du logiciel)






