
Operações de emergência que requerem a intervenção de um operador de elevador
As Operações de Emergência são procedimentos específicos a serem adotados para mover manual ou automaticamente a cabine e evacuar pessoas presas após um bloqueio do elevador fora da zona da porta. Os procedimentos diferem dependendo da tecnologia do sistema (elétrico ou hidráulico) e devem ser realizados por técnicos qualificados ou pessoal adequadamente treinado.
Operações de emergência para elevadores VVVF
OPERAÇÃO DE EMERGÊNCIA ELÉTRICA (EN81-20/50 – § 5.12.1.6)
A manobra de emergência está sempre presente nos elevadores elétricos de tração que cumprem as normas EN81-20 e EN81-1. É utilizada quando é necessário mover a cabina, tanto em situações de emergência como durante testes dinâmicos (testes de aderência, testes de pára-quedas, testes de amortecedores, etc.).
O procedimento para ativar esta manobra é o seguinte:
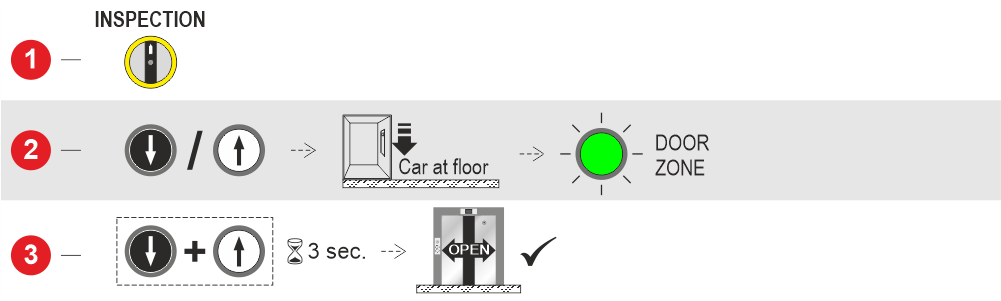
1 – Coloque o seletor de modo na posição «INSPECTION» (Inspeção).
2 – Pressione constantemente os botões «Up» (Subir) ou «Down» (Descer). A cabina move-se na direção desejada.
3 – Pressione os botões «Up» (Subir) e «Down» (Descer) simultaneamente durante 3 segundos para abrir as portas da cabina.
Para reiniciar o sistema, coloque o interruptor na posição «Normal».
Nota: quando no modo «INSPEÇÃO», todos os movimentos da cabina, exceto aqueles controlados por esta manobra, e todas as chamadas para os andares, incluindo dispositivos remotos, são excluídos.
No caso de o interruptor da caixa superior do carro ou da caixa de pit estar no modo «INSPEÇÃO», esta manobra elétrica é inibida (é dada prioridade aos painéis de botões de inspeção no poço).
OPERAÇÃO DE RESGATE MANUAL
A manobra de resgate manual, obrigatória para todos os sistemas EN81-20, permite que a cabina seja movida manualmente para o piso mais próximo, utilizando a diferença de peso entre o contrapeso e a cabina. Esta manobra é utilizada em todos os casos de bloqueio da cabina fora do piso, mesmo em caso de falha de energia do sistema, para evacuar rapidamente as pessoas presas. Todos os controladores Pitagora 4.0 MRL e Machine Room estão equipados com uma unidade UPS incorporada que reativa a placa-mãe em modo de emergência e permite que a cabina seja levada para cima/para baixo até ao andar mais favorável.
Nota: esta manobra de resgate deve ser realizada por técnicos qualificados e só é possível se não houver falhas de bloqueio ativas.
O procedimento para ativar a manobra de resgate por desequilíbrio é diferente para elevadores sem engrenagem 81.20 e com engrenagem 81.1/81.20:
Acionamento sem engrenagens (elevadores de tração MR e MRL)
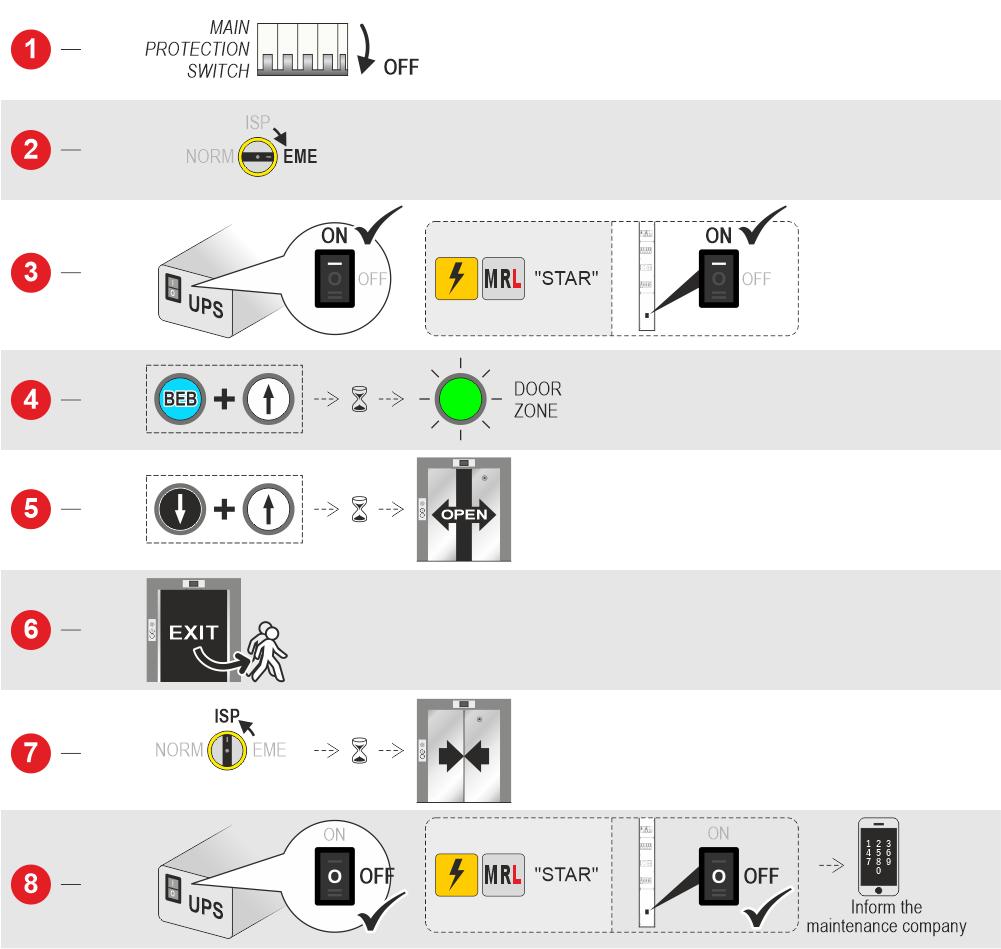
1 – Coloque o interruptor principal na posição «OFF»
2 – Coloque o interruptor de modo na posição «EME»
3 – Ligue a unidade UPS dentro do painel
4 – Pressione os botões «Enable» e «Up» constantemente. A cabine move-se desequilibrando-se a uma velocidade controlada. O indicador «Door Zone» acende para indicar que a cabina chegou ao piso
5 – Pressione os botões «Up» e «Down» constantemente para abrir as portas da cabina
6 – Liberte quaisquer pessoas presas, destrancando as portas do piso
7 – Coloque o interruptor de modo na posição «Inspection»
8 – Desligue a UPS
Transmissão por engrenagens (elevadores de tração MR)
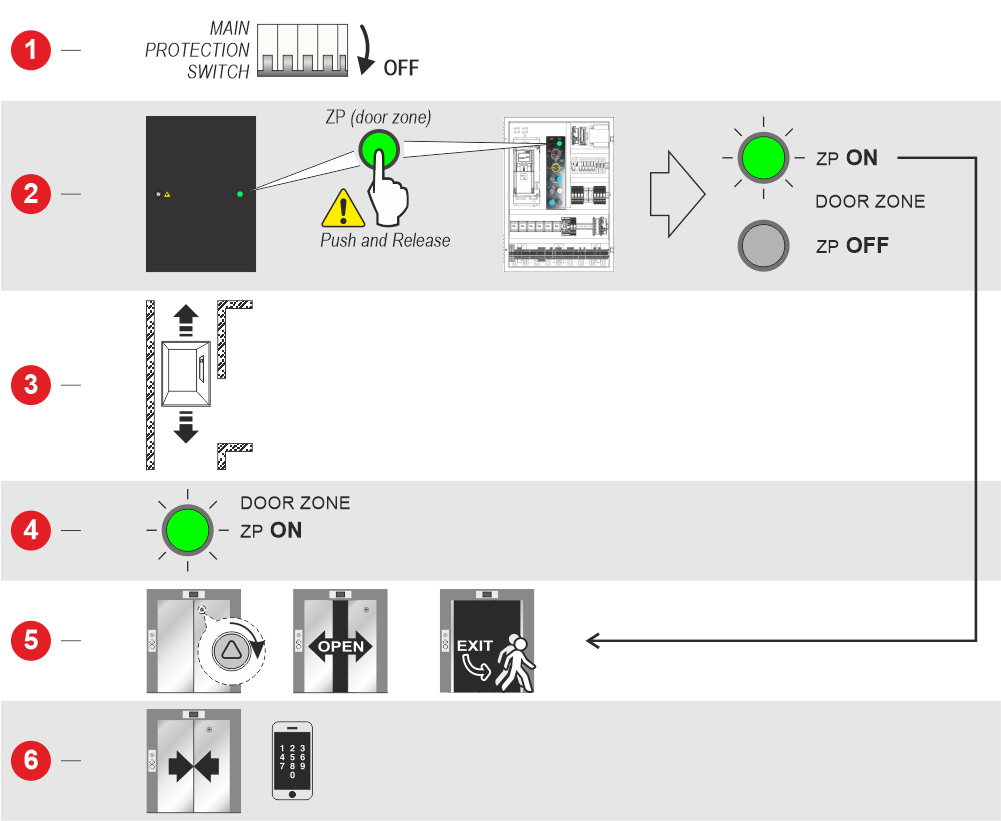
1 – Coloque o interruptor principal na posição «OFF»
2 – Verifique o indicador da zona da porta (na porta do armário para elevadores EN81-1, no painel de inspeção para elevadores EN81-20). Se a luz estiver acesa (cabina na zona da porta), vá para o ponto 5. Caso contrário, vá para o ponto 3.
Atenção: Após pressionar o botão ZP, tem 1 hora (padrão) para realizar a manobra. Se o procedimento demorar mais tempo, pressione-o novamente.
3 – Abra o travão usando a alavanca apropriada na transmissão por engrenagens e, ao mesmo tempo, gire o volante na direção do movimento mais fácil ou do menor esforço. Mova a cabina até que ela alcance o piso mais próximo (luz verde acesa)
4 – Interrompa o movimento quando a luz verde «Zona da porta» acender
5 – Desbloqueie as portas da cabina
6 – Durante e após a manobra manual, certifique-se de que todas as portas de patamar estejam fechadas e
trancadas e informe a empresa de manutenção. Se o sistema permanecer fora de serviço por mais de
14 horas, mova o carro para o piso mais baixo.
Operações de emergência para elevadores hidráulicos
OPERAÇÃO DE RESGATE MANUAL
Nos elevadores hidráulicos, a manobra de resgate manual está sempre presente, independentemente dos regulamentos. O procedimento para ativar a manobra manual de emergência é o seguinte:
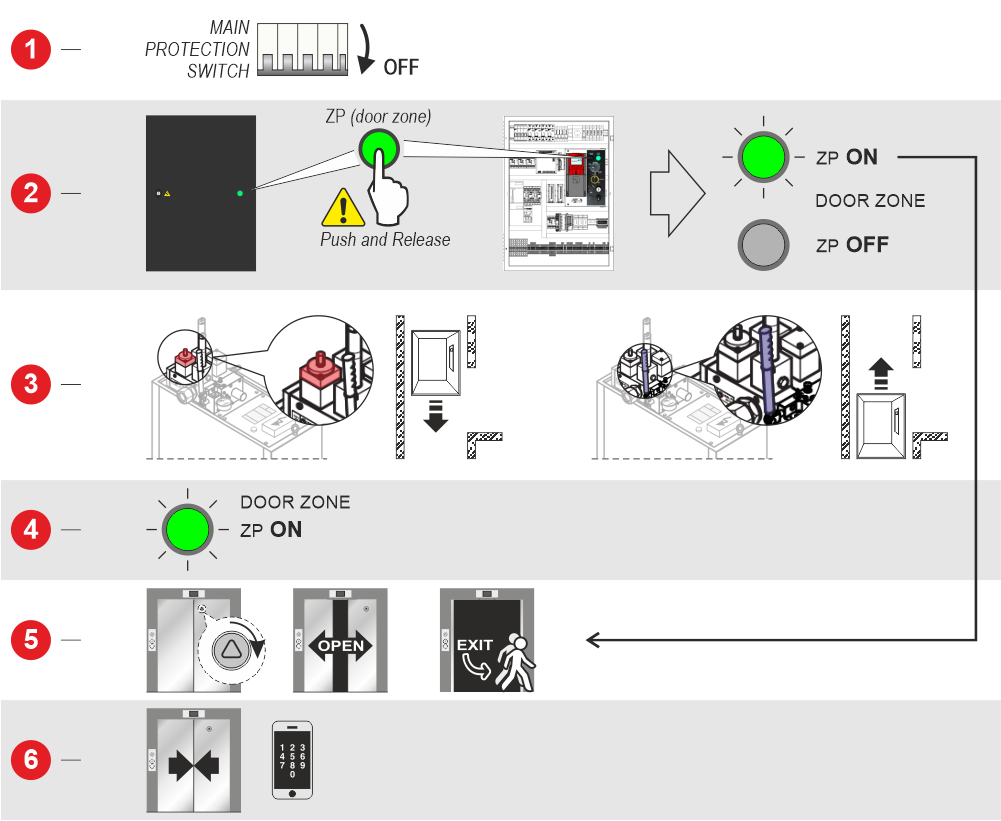
1 – Coloque o interruptor principal na posição «OFF»
2 – Verifique o indicador da zona da porta (na porta do armário para elevadores EN81-1, no painel de inspeção para elevadores EN81-20). Se a luz estiver acesa (cabina na zona da porta), vá para o ponto 5. Caso contrário, vá para o ponto 3.
Atenção: Após pressionar o botão ZP, tem 1 hora (padrão) para realizar a manobra. Se o procedimento demorar mais tempo, pressione-o novamente.
3 – Pressione e mantenha pressionado o botão na unidade hidráulica para mover a cabina para baixo. Use a alavanca da bomba manual para mover a cabine para cima.
4 – Interrompa o movimento quando a luz verde “Zona da porta” acender
5 – Destranque as portas da cabine
6 – Durante e após a manobra manual, certifique-se de que todas as portas do patamar estejam fechadas e
trancadas e informe a empresa de manutenção. Se o sistema permanecer fora de serviço por mais de
14 horas, mova o carro para o andar mais baixo.
Sistemas de retorno automático ao piso
O segundo valor do parâmetro EME Delay no menu Signals indica o atraso no início da manobra de emergência, ou seja, o atraso entre o sinal de falha da rede elétrica (IEME) e a ativação da saída (OEME) antes que o sistema mude para o modo de emergência automático.
Elevadores VVVF
Tipo A – Retorno automático ao andar mais próximo – Emergência automática VVVF EN81-20/81-1 com UPS externo
O sistema de retorno automático (emergência automática) para o andar mais próximo exige que o painel de controlo, após um apagão ou breve ausência de energia, retorne automaticamente a cabina para o andar mais próximo, sem intervenção de terceiros.
O painel de controlo Pitagora 4.0, se equipado com esta opção, é configurado com uma UPS externa dimensionada de acordo com o tamanho do inversor. O painel de controlo, uma vez que entrou em modo de emergência e antes de começar a mover a cabina em direção ao piso, realiza uma verificação para compreender a direção favorável (ou seja, identifica a direção em que o inversor fornece menos corrente ao motor e, portanto, onde há menos absorção em direção à UPS).
Isto porque a UPS é dimensionada para um curto período de funcionamento e, portanto, tem autonomia limitada. Assim que chegar ao piso, o painel de controlo abrirá as portas para deixar sair as pessoas presas e fechá-las novamente. Assim que a manobra estiver concluída, o painel de controlo e a UPS desligar-se-ão após um tempo pré-definido de 5 minutos.
O painel e a UPS retomarão o funcionamento normal assim que a energia for restaurada.
Tipo B – Retorno automático ao andar mais próximo – Emergência integrada GEARLESS EN81-20
O painel de controlo Pitagora 4.0 EN81-20, se combinado com um motor sem engrenagens, proporciona uma manobra integrada em caso de falha de energia, utilizando o dispositivo que permite a manobra manual devido ao desequilíbrio já presente no painel de controlo. O sistema de retorno automático (emergência automática) para o piso mais próximo prevê que o painel de controlo, após uma falha de energia ou uma breve ausência de energia, traga autonomamente a cabina de volta ao piso mais próximo na direção favorável (dependendo da carga presente na cabina), apenas com a abertura dos travões e o controlo de velocidade. O binário de travagem dos motores deste tipo deve garantir uma velocidade de movimento limitada, caso contrário, o painel mantém-no sob controlo com uma modulação dos travões até que o piso mais próximo seja alcançado. Uma vez alcançado o piso, o painel abrirá as portas para deixar sair as pessoas presas e fechá-las novamente. O painel retomará o funcionamento normal assim que a energia for restaurada.
Tipo C – Retorno automático ao piso predefinido – VVVF de emergência automático EN81-20/81-1 com UPS externo
A manobra automática de emergência para um piso pré-estabelecido requer que o painel de controlo, após um apagão ou uma breve ausência de energia, retorne a cabina a um piso pré-estabelecido. O painel de controlo está equipado com um UPS externo dimensionado de acordo com o sistema, uma vez que é necessário levar em consideração variantes que podem variar de sistema para sistema (potência do motor, comprimento do eixo, velocidade de emergência, peso da cabina, capacidade da cabina, etc.). O painel de controlo, uma vez que tenha entrado em modo de emergência, irá direcionar a cabina para o piso pré-estabelecido. Uma vez que tenha chegado ao piso pré-estabelecido, o painel de controlo irá abrir as portas para permitir que as pessoas presas saiam e fechá-las novamente. Uma vez que a manobra esteja concluída, o painel de controlo e o UPS irão desligar-se após um tempo pré-estabelecido de 5 minutos. O painel de controlo e o UPS irão retomar o funcionamento normal uma vez que a energia tenha sido restaurada.
Tipo D – Manobra de evacuação específica para elevadores em navios (RNO)
A evacuação ocorre no piso de evacuação em caso de incêndio (sem UPS externo). Para sistemas multiplex, um elevador é movido de cada vez.
Elevadores hidráulicos
A manobra automática de emergência no piso, no caso de elevadores hidráulicos, exige que o painel de controlo, após uma falha de energia ou uma breve ausência de energia, leve a cabina até ao piso mais baixo. O painel de controlo está equipado com um pequeno UPS para reiniciar os periféricos do painel de controlo. O painel de controlo deve estar sempre equipado com o circuito tampão de emergência.
O painel de controlo, uma vez que tenha entrado em modo de emergência, começa a mover a cabina em direção ao piso usando a válvula de descida até que ela alcance o piso. Quando a cabina chega ao piso, o painel de controlo abre as portas para permitir que as pessoas presas desembarquem e as fecha novamente. Quando a manobra é concluída, o painel de controlo e o UPS desligam-se. O painel de controlo retoma o funcionamento normal assim que a energia é restaurada.