(v 1.9)
Os codificadores DEUM.M15SER e DEUM.M15CAN permitem ligar os visores programáveis DMG CAN ou seriais e o sintetizador de voz CARUSO a qualquer tipo de controlador.
As principais especificações são as seguintes:
- Fonte de alimentação: 12/24 V CC;
- Até 15 entradas;
- Possibilidade de gerir automaticamente um kit de deteção de piso independente do painel de controlo (controlador). O codificador pode, assim, fornecer detalhes sobre a posição da cabina do elevador, a sua direção e enviar mensagens de piso.
Precauções de segurança e utilização
Antes de instalar os nossos produtos, recomendamos que consulte a secção sobre precauções de segurança e utilização no link abaixo.

Principais características
- Protocolos de entrada: 1 fio por andar • 1 fio por segmento •Gray bits • Serial MEA / AUTINOR / TKE
- Sensor de posição independente
- Autodiagnóstico: LED interno + mensagem no indicador de posição
- Os controlos de sinalização e luzes de emergência estão presentes na caixa de visualização da cabina do elevador.
- Controlo de mensagens deslizantes de posição e serviço para ecrãs matriciais
- Controlo diferenciado das setas de rolagem (sim/não) com base no movimento da cabina do elevador.
- O codificador pode ser programado de forma serial pela DMG, mediante solicitação no pedido, ou diretamente no local, através dos dois botões ADV e PRG.
- Modo de «economia de energia» para reduzir o consumo de energia quando o sistema está inativo
Layout geral
– Saída serial CAN
– Saída serial de 3 fios
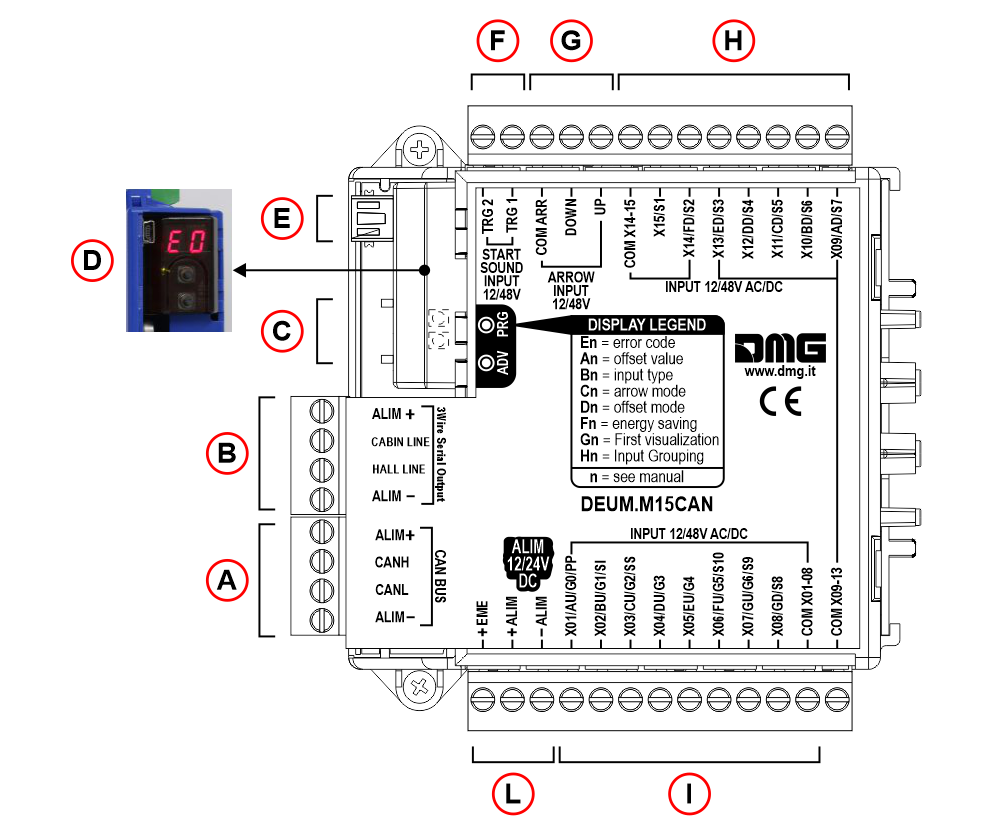 A) – Terminais para ligar o ecrã e o sintetizador de voz (saída serial CAN)
A) – Terminais para ligar o ecrã e o sintetizador de voz (saída serial CAN)B) – Terminais para ligar o visor e o sintetizador de voz (saída serial de 3 fios)
C) – Teclas de programação + LED de autodiagnóstico
D) – Visor de 2 dígitos
E) – Conector de programação (USB Mini-B)
F) – Gatilho do sintetizador / gongo
G) – Setas
H) – Entradas de posição (9 – 15)
I) – Entradas de posição (1 – 8)
L) – Alimentação 12/24 V CC
– Saída serial de 3 fios
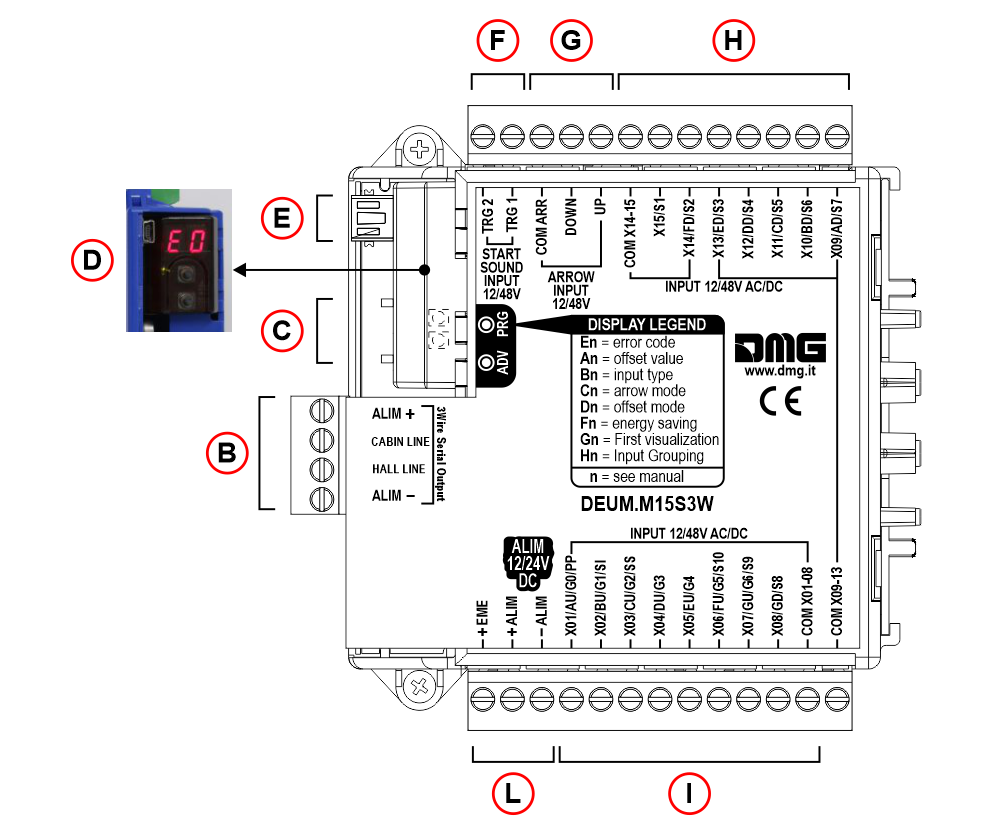 B) – Terminais para ligar o visor e o sintetizador de voz (saída serial de 3 fios)
B) – Terminais para ligar o visor e o sintetizador de voz (saída serial de 3 fios)C) – Teclas de programação + LED de autodiagnóstico
D) – Visor de 2 dígitos
E) – Conector de programação (USB Mini-B)
F) – Gatilho do sintetizador / gongo
G) – Setas
H) – Entradas de posição (9 – 15)
I) – Entradas de posição (1 – 8)
L) – Alimentação 12/24 V CC
– Saída serial RS485
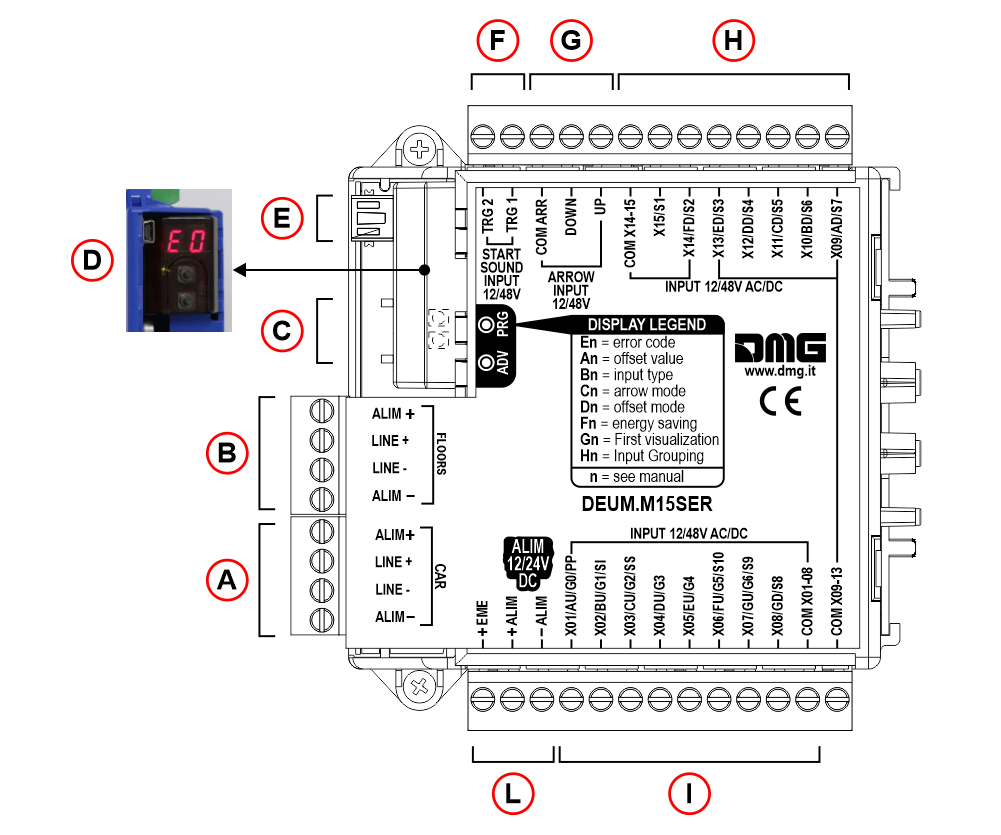 A) – Terminais para ligar o visor e o sintetizador de voz (cabine)
A) – Terminais para ligar o visor e o sintetizador de voz (cabine)B) – Terminais para ligar o ecrã e o sintetizador de voz (pisos)
C) – Teclas de programação + LED de autodiagnóstico
D) – Visor de 2 dígitos
E) – Conector de programação (USB Mini-B)
F) – Gatilho do sintetizador / gongo
G) – Setas
H) – Entradas de posição (9 – 15)
I) – Entradas de posição (1 – 8)
L) – Alimentação 12/24 V CC
Instruções para transferência bancária
Entradas
Entradas de posição
– 15 andares no máximo
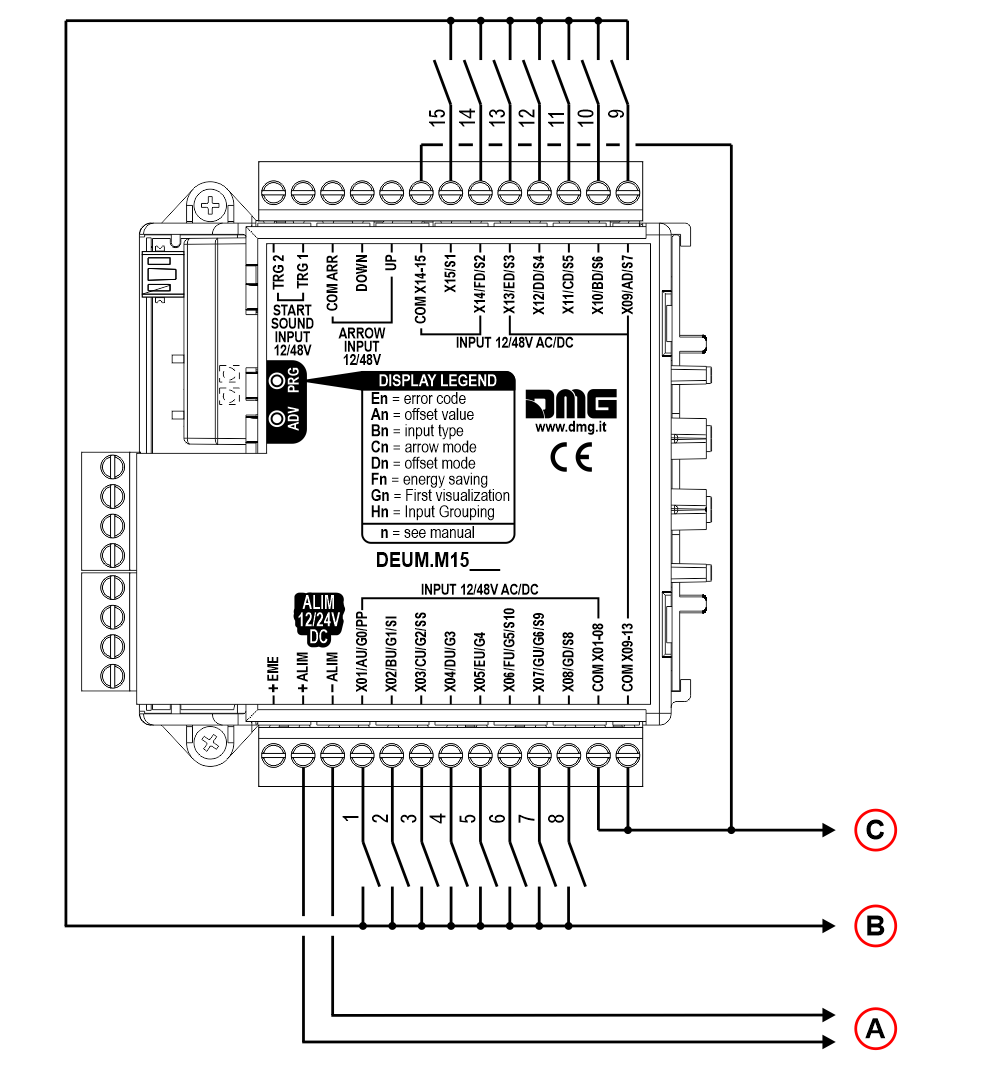 A) – Alimentação 12/24 V CC
A) – Alimentação 12/24 V CCB) – Entrada de alimentação 12/48 V CA/CC (A entrada «X01» corresponde ao piso mais baixo.)
C) – Entrada comum
– 109 visualizações no máximo (-9, 0, 99)
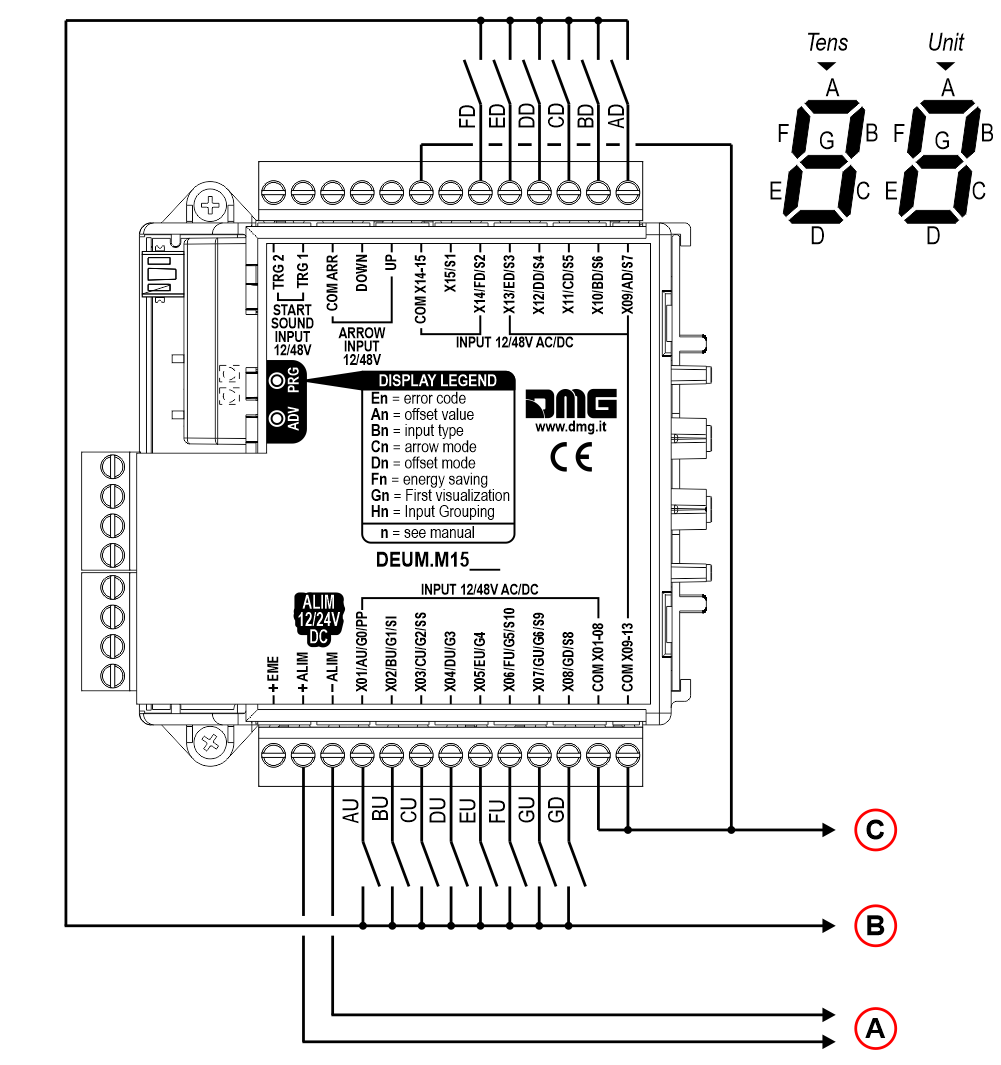 A) – Alimentação 12/24 V CC
A) – Alimentação 12/24 V CCB) – Entrada de alimentação 12/48 V CA/CC
C) – Entrada comum
– 100 visualizações no máximo (-9, 0, 90)
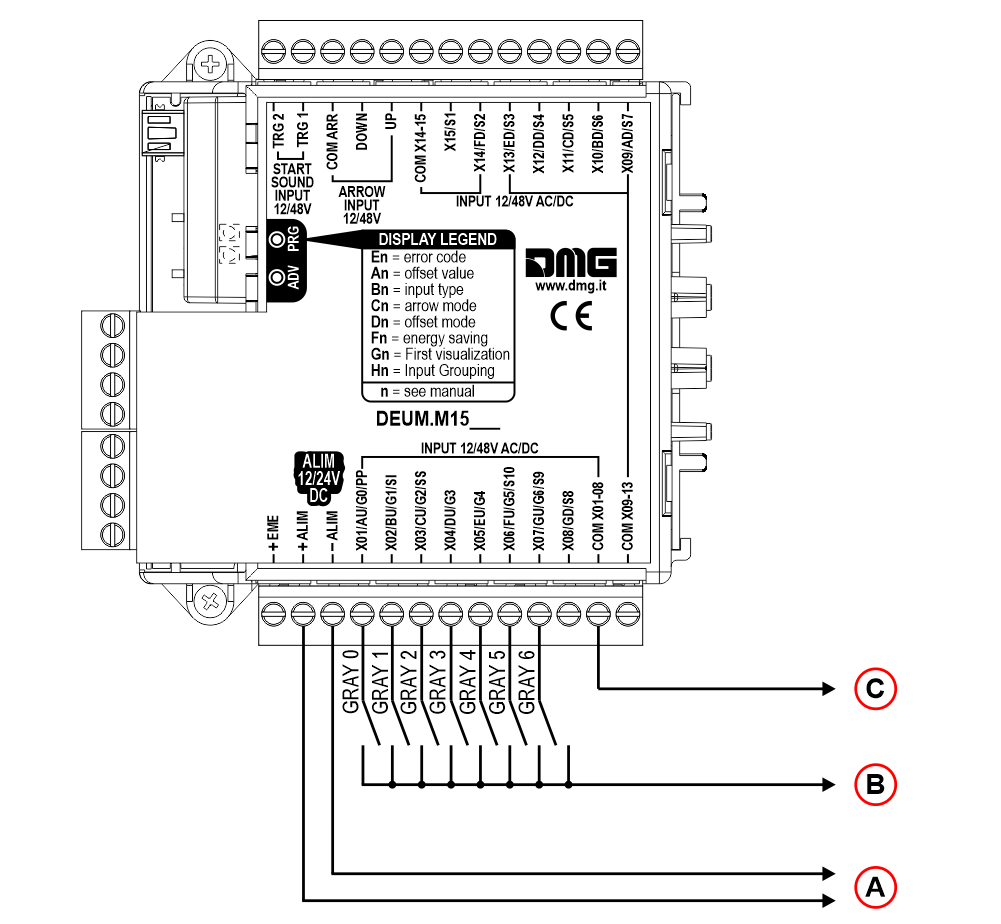 A) – Alimentação 12/24 V CC
A) – Alimentação 12/24 V CCB) – Entrada de alimentação 12/48 V CA/CC
C) – Entrada comum
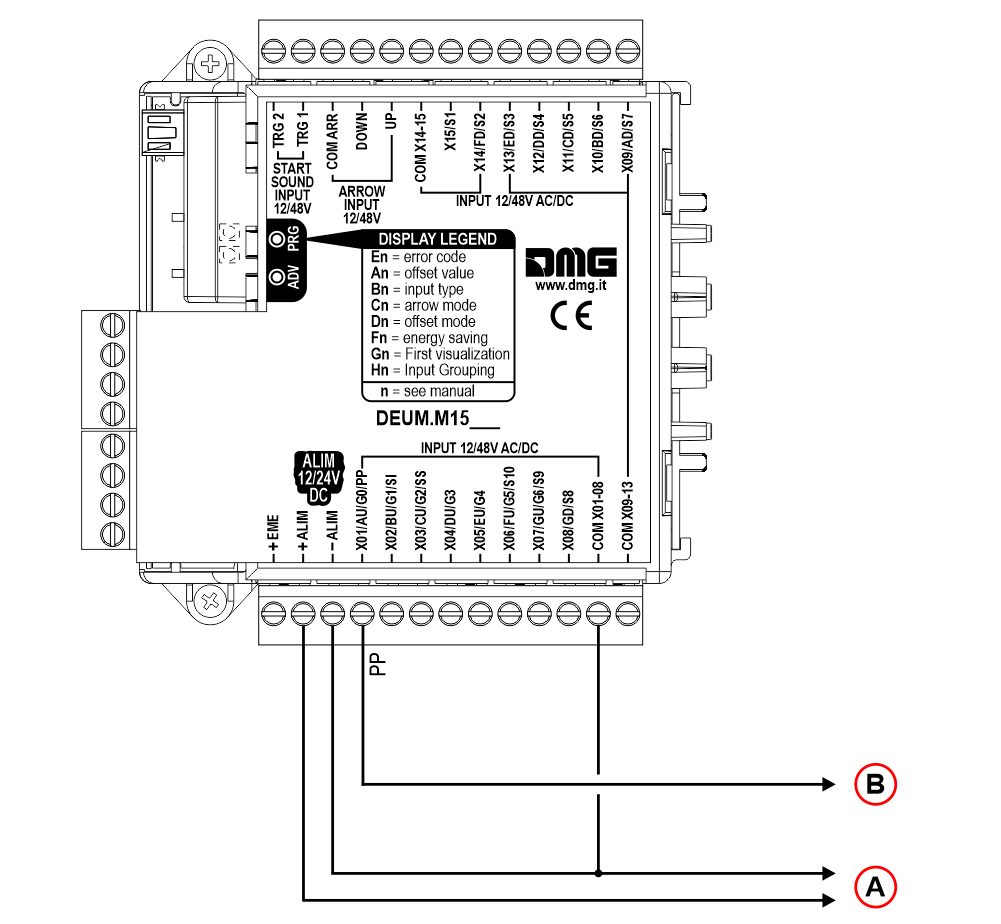 A) – Alimentação 12/24 V CC
A) – Alimentação 12/24 V CCB) – Saída do visor do painel de controlo (controlador)
Se o painel de controlo (controlador) não fornecer sinais de posição, direção e mensagens de voz, um kit de deteção automática de piso pode ser conectado ao codificador.
Instalação:
1) – Ligue os dois sensores magnéticos NC ao DEUM.
2) – Coloque dois ímanes nas guias correspondentes para cada piso (ambos os impulsores são desativados com a cabina no piso).
3) – Adicione um terceiro íman ao piso principal para que ambos os sensores sejam ativados quando a cabina estiver no piso (reinicialização do sistema após falta de energia ou erros na contagem de pisos).
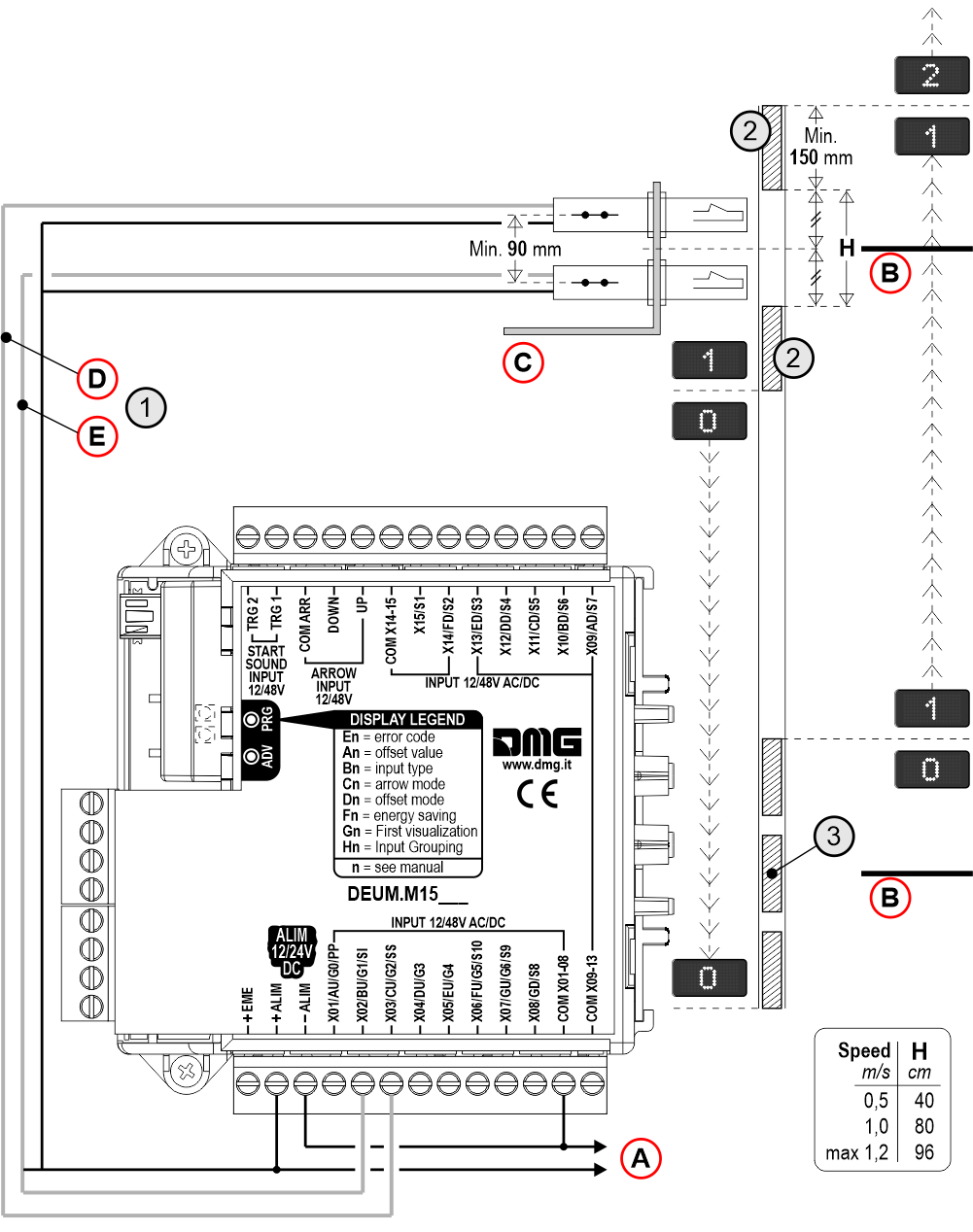
A) – Alimentação 12/24 V CC
B) – Piso / piso principal
C) – Suporte fixado na parte superior da cabina do elevador
D) – Sensor superior
E) – Sensor inferior
Nota: Kit de sensor pré-cablado + íman e suporte disponíveis mediante pedido.
Indicadores e entradas para luzes de emergência
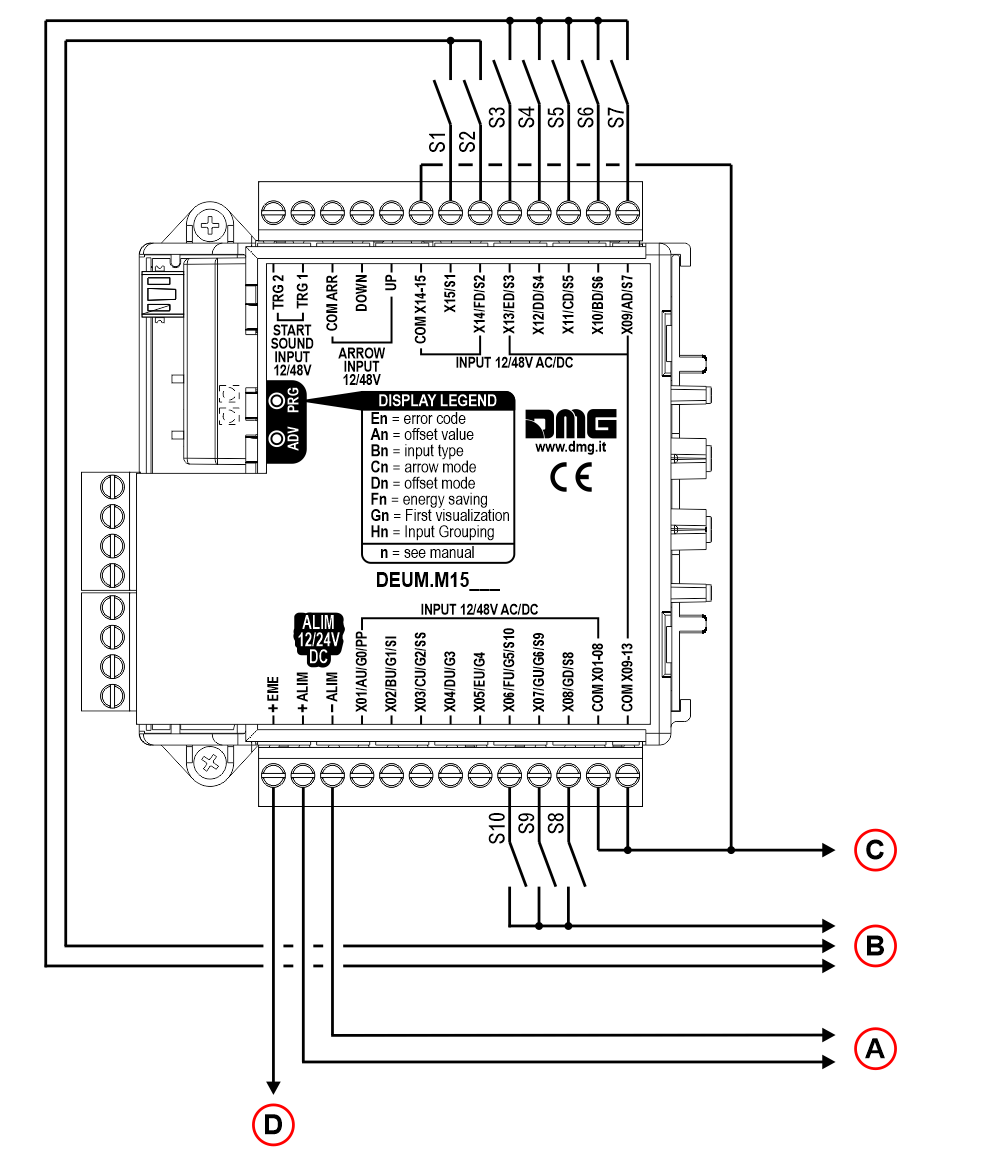
A) – Alimentação 12/24 V CC
B) – Entrada de alimentação 12/48 V CA/CC
C) – Entrada comum
D) – Ao ligar a entrada EME+ (alimentação de emergência de 12/24 V), a lâmpada de emergência é ativada.
| S1 | Alarme enviado |
| S2 | Comunicação estabelecida |
| S3 | Sobrecarga |
| S4 | Bombeiros |
| S5 | Prioridade para carros |
| S6 | Abertura das portas |
| S7 | Portas a fechar |
| S8 | Poupança de energia |
| S9 | Fora de serviço |
| S10 | Inspeção |
Entrada da seta de direção
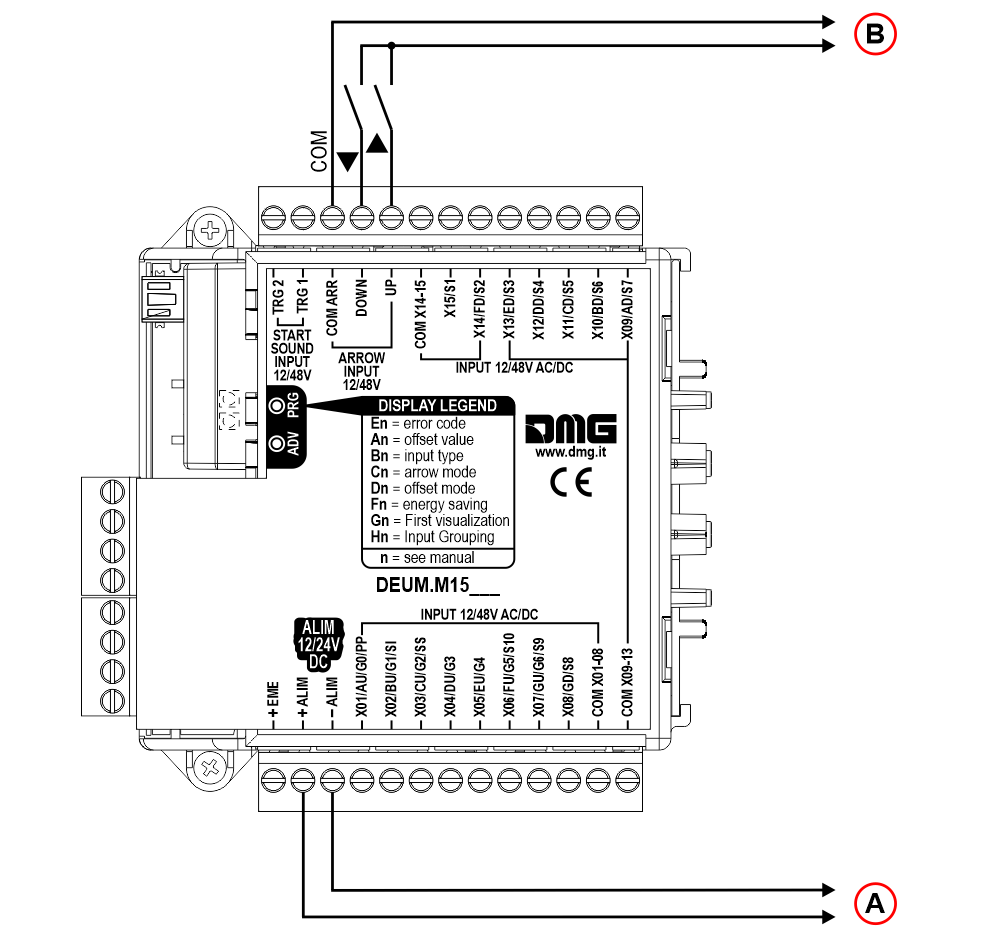
A) – Alimentação 12/24 V CC
B) – Setas para cima/para baixo 12/48 V CA/CC
Nota: O «sensor automático de piso» («Programação > Configurações personalizadas > Configurações de codificação > B6») para sensores de posição pode ser ativado sem utilizar os terminais de setas.
No caso dos sensores de posição, é possível ativar a opção «sensor automático de piso», sem utilizar entrada de setas.
Entrada de disparo (gongo/sintetizador de voz)
Esta entrada aciona as mensagens de voz no sintetizador de voz DMG Caruso e o gongo.

A) – Alimentação 12/24 V CC
B) – Sintetizador de voz/disparador de gongo (12/48 V CA/CC)
Nota: No caso dos sensores de posição, é possível ativar a opção «sensor automático de piso» sem utilizar as entradas de disparo (TRG1/2).
“Programação > Definições personalizadas > Definição de codificação > B6”
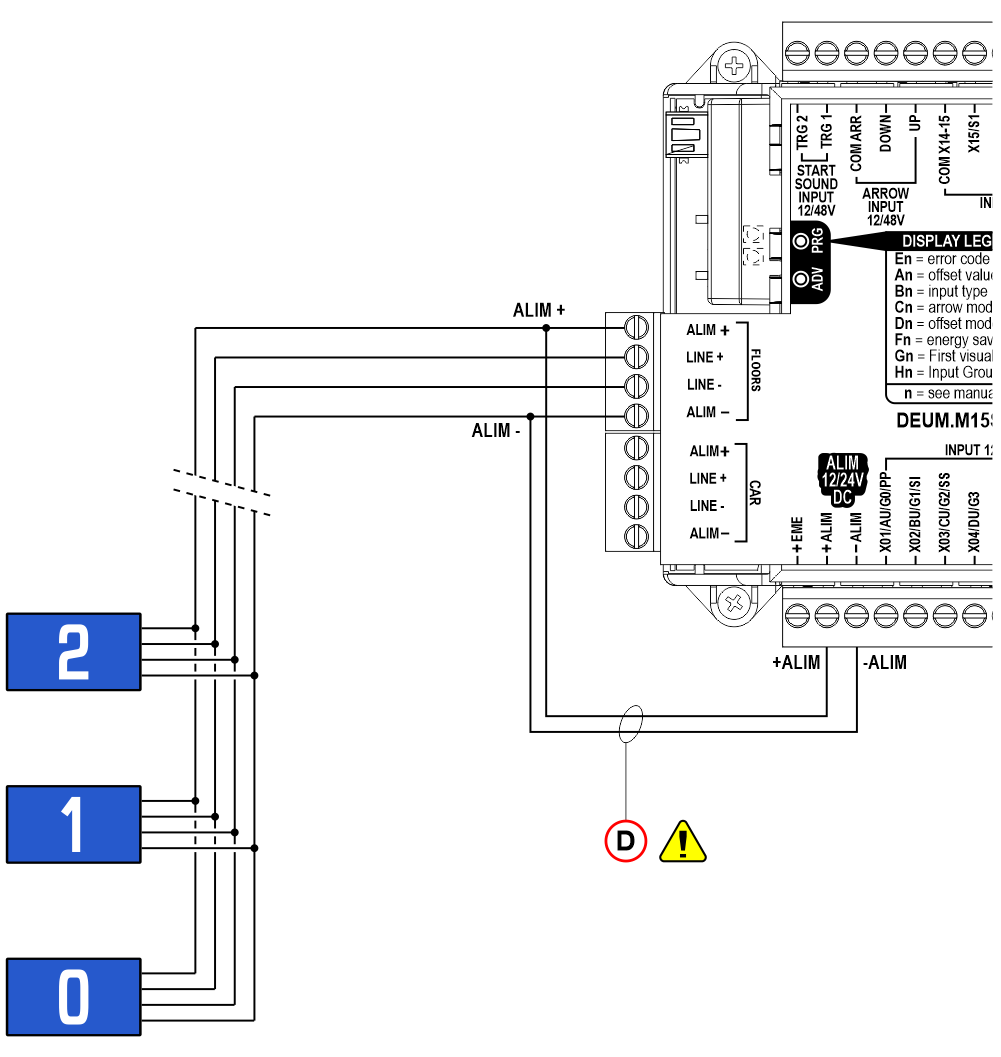
Saídas em série
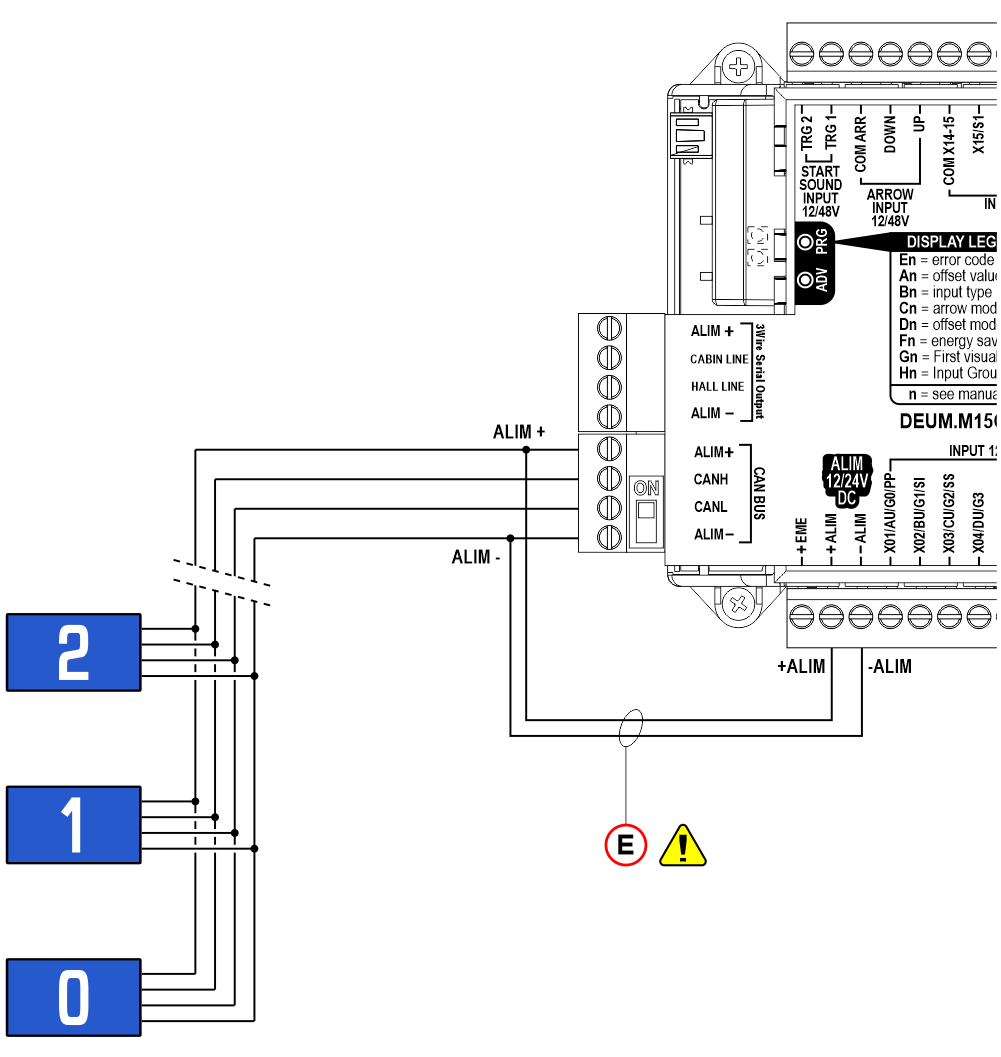
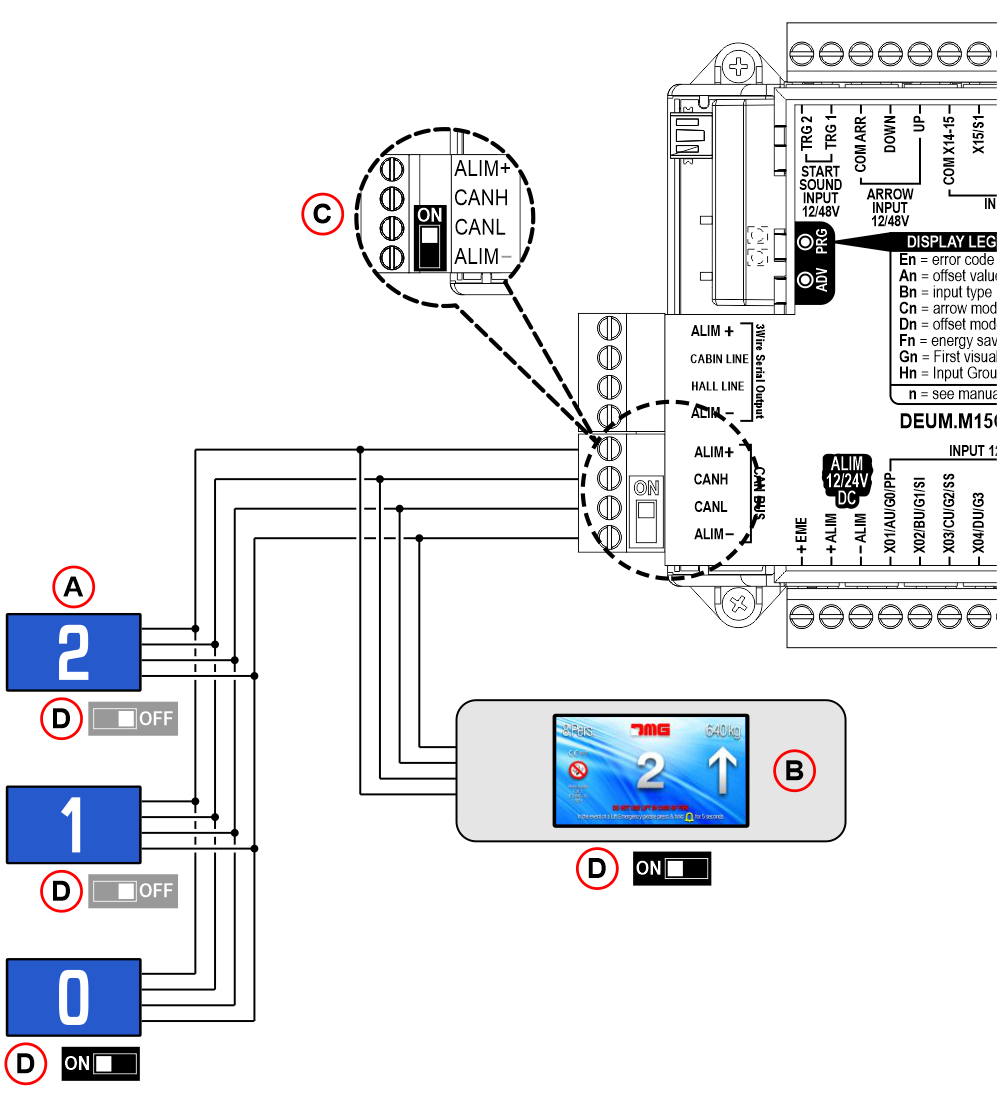 A) – Indicador de posição serial CAN (piso)
A) – Indicador de posição serial CAN (piso)B) – Indicador de posição serial CAN (Carro)
C) – RESISTOR DE TERMINAÇÃO. Se estiver presente APENAS o indicador de posição da cabina do elevador ou APENAS os indicadores de piso, a terminação da linha CAN deve ser ativada no DEUM.M15CAN, conforme mostrado no diagrama.
D) – Comutar TERM.CAN. Ativar a terminação da linha CAN no visor da cabina do elevador e no último visor no piso.
E) – Cablagem adicional com absorção > 2A (cerca de 16 indicadores de posição)
Estado do Dip-Switch |
|||
|---|---|---|---|
| No codificador DEUM | No indicador de posição (Carro) | No indicador de posição (Piso - o último) |
|
| Apenas o indicador de posição da cabine está presente | - | ||
| Apenas os indicadores de posição nos andares estão presentes. | - | ||
| Todos os indicadores de posição estão presentes (Carro + Pisos) | |||
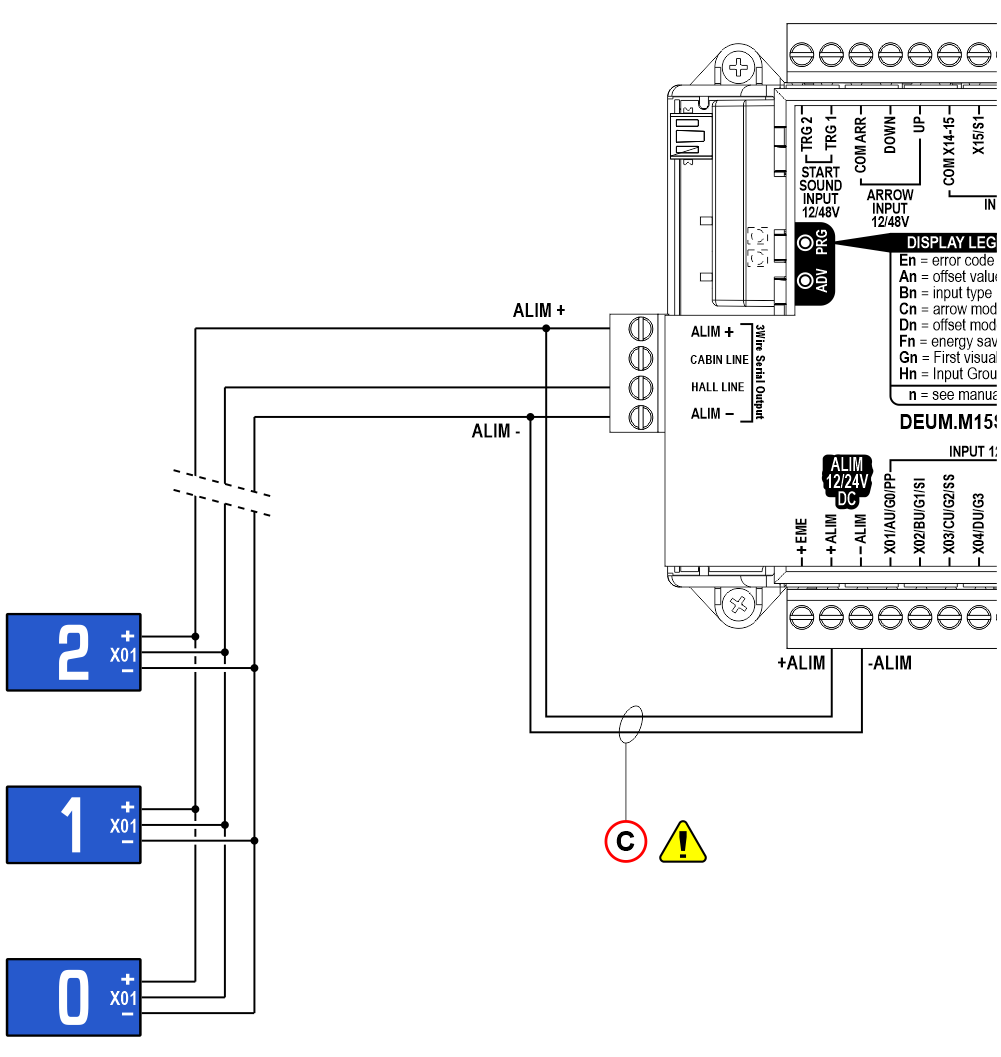
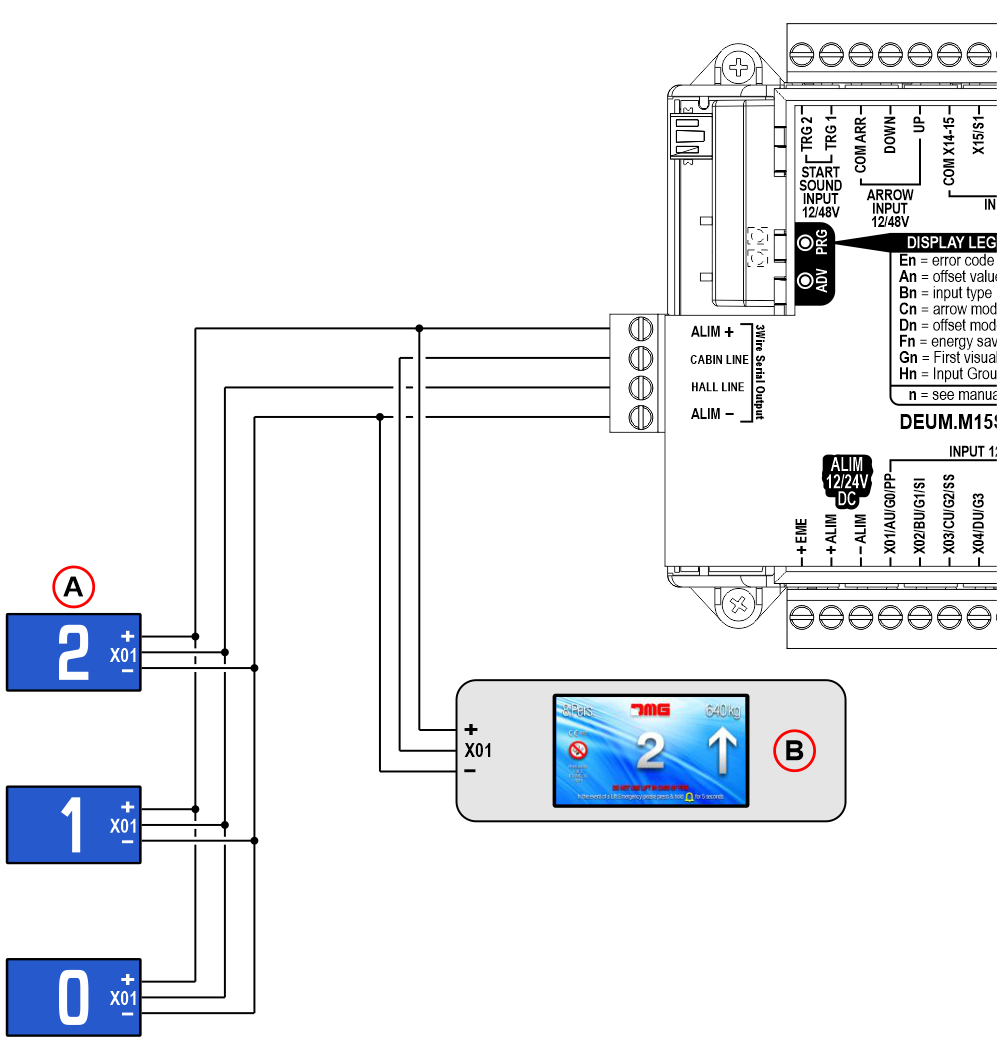 A) – Indicador de posição (piso)
A) – Indicador de posição (piso)B) – Indicador de posição (carro)
C) – Cablagem adicional com absorção > 2A (cerca de 16 indicadores de posição)
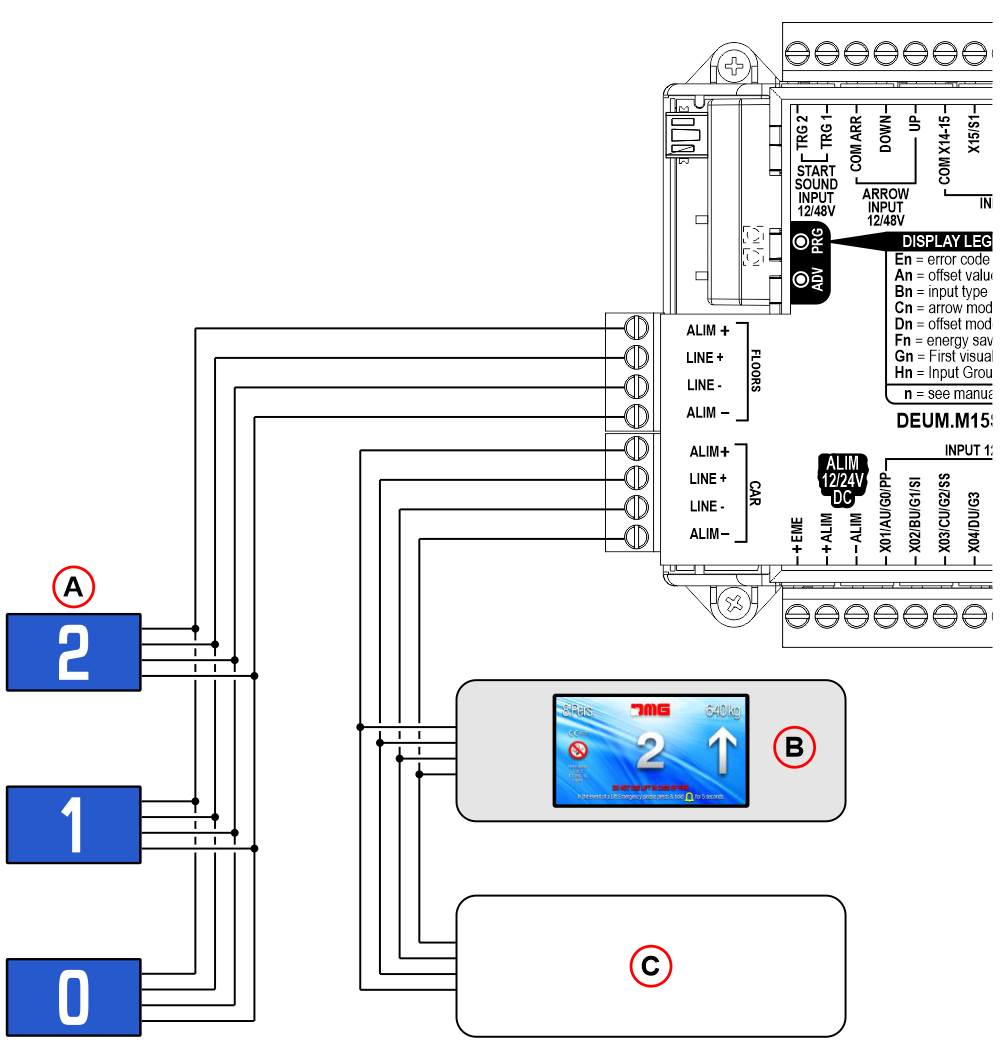 A) – Indicador de posição (piso)
A) – Indicador de posição (piso)B) – Indicador de posição (carro)
C) – Sintetizador de voz «Caruso»
D) – Cablagem adicional com absorção > 2A (cerca de 16 indicadores de posição)
Programação
 |  |  |  |
| Tecla do menu de navegação | Toque prolongado (> 3 segundos) Tecla de acesso ao menu Definição do valor | Chave de configuração | Versão do firmware |
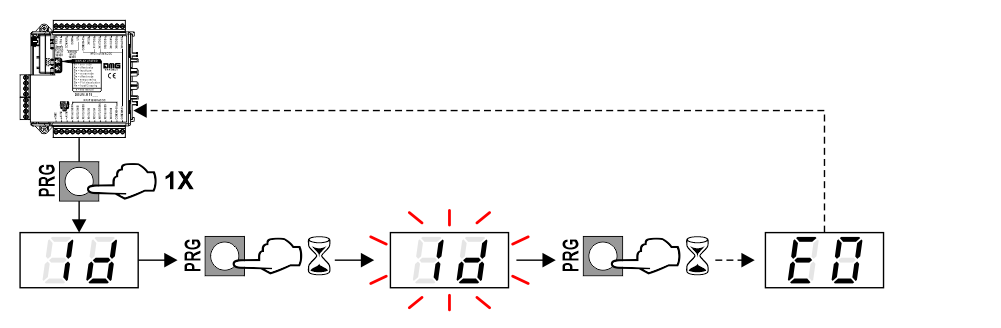
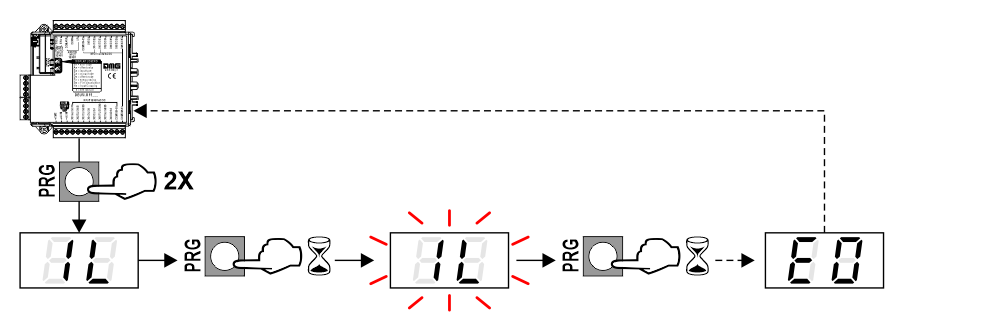
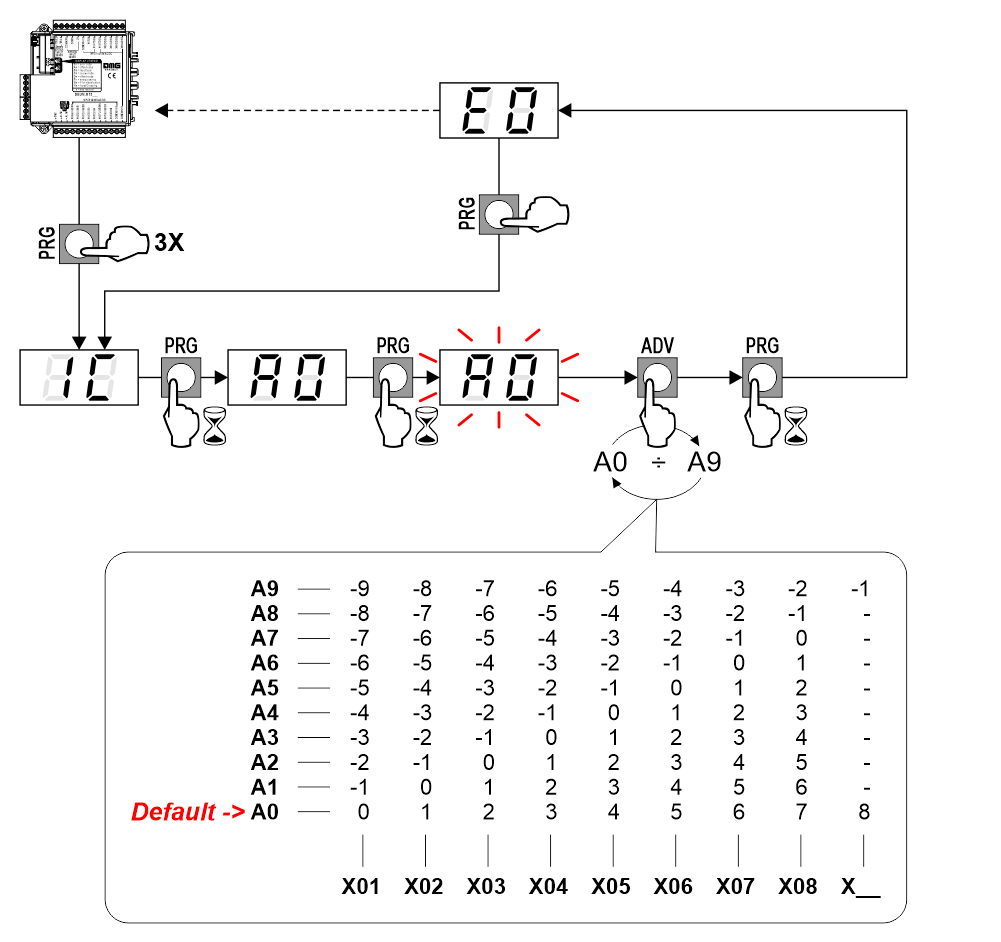
Configurações de visualização
Para configurar letras/números específicos, coloque o elevador no chão e siga o diagrama.

Configuração padrão
Todos os parâmetros de fábrica do DEUM podem ser reiniciados utilizando o seguinte procedimento RESET:
Restaurar última configuração
Restaure a última configuração carregada com a ferramenta de software DEUM Coder.
Definições personalizadas
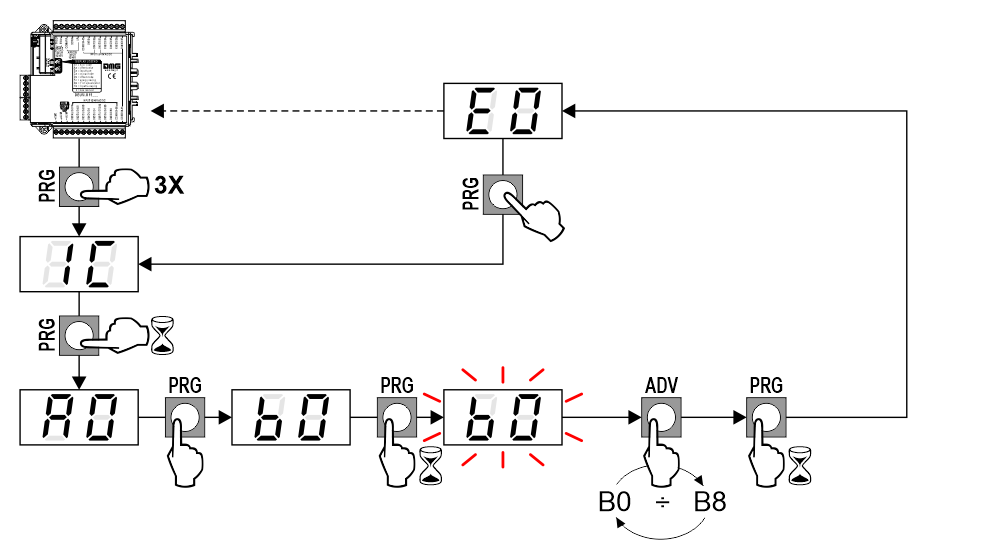
B0 = 1 fio/piso (padrão)
B1 = Gray
B2 = Mea
B3 = Autinor
B4 = Sensor manual (com setas e entrada de gatilho)
B5 = 1 fio/segmento
B6 = Sensor automático (com setas automáticas e disparo automático)
B7 = Código binário
B8 = TKE
C0 = Setas fixas (padrão)
C1 = Seta de rolagem
C2 = Dependente do gatilho: Acionador ligado = Setas fixas / Acionador desligado = Setas rolantes (ver também «Definição de codificação» e «Introdução da seta de direção»)
Para usar o gongo e as setas de direção seguinte, é necessário definir C2 e definir o indicador de posição para a «direção seguinte».
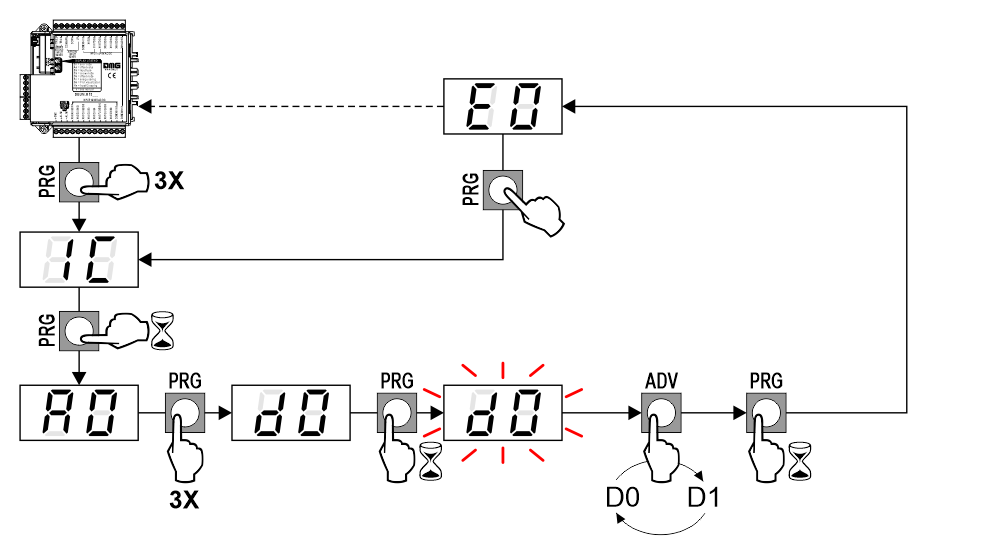
D0 = Desvio negativo (padrão)
D1 = Desvio positivo
Veja também “Definição do valor de compensação”.
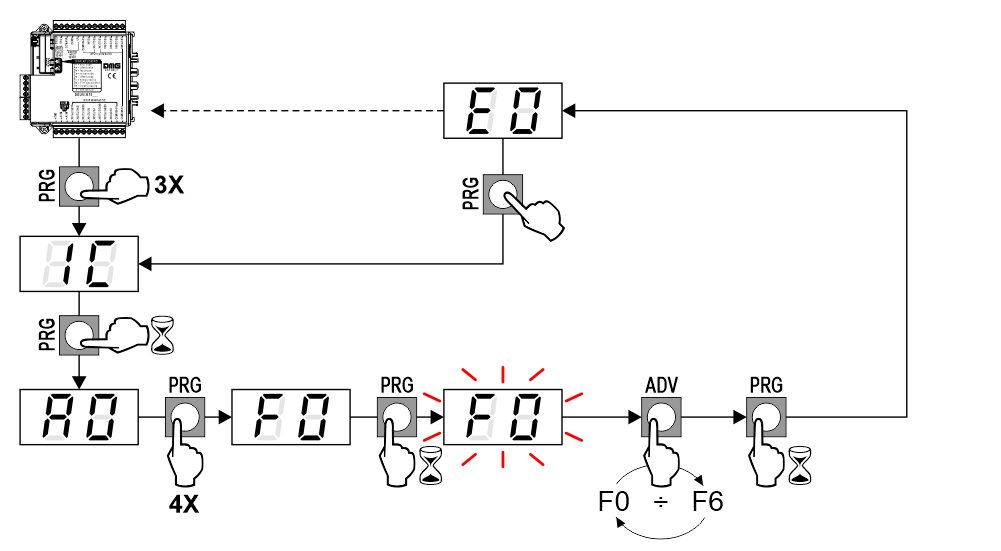
F0 (Padrão) = Função desativada: Forneça a entrada «S8» (consulte «Indicadores e entradas da lâmpada de emergência») para comandar a função a partir de outra unidade.
F1* = 10 minutos
F2* = 20 minutos
F3* = 30 minutos
F4* = 40 minutos
F5* = 50 minutos
F6* = 60 minutos
(*) = Entrada «S8» (ver «Indicadores e entradas para luzes de emergência”) NÃO deve ser ligado à fonte de alimentação.
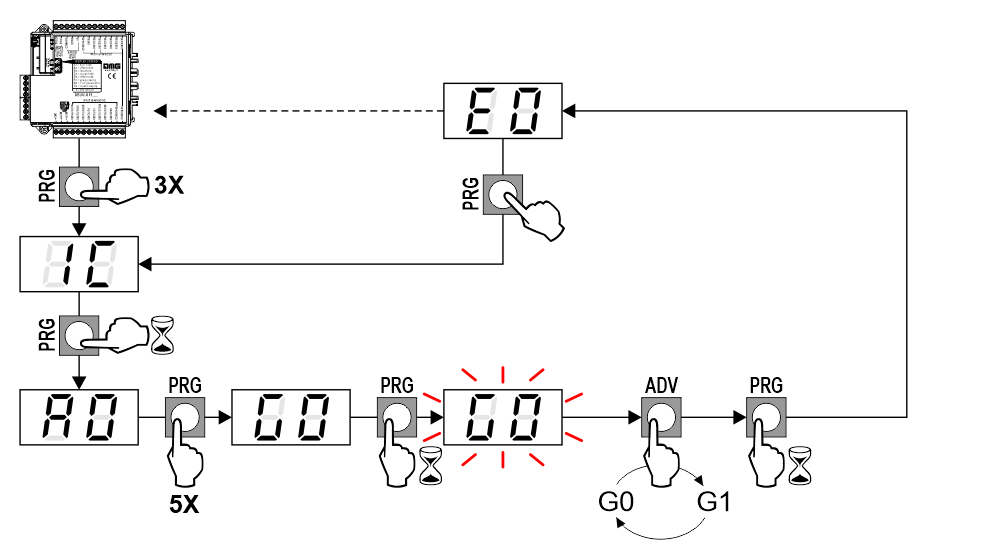
G0 = Em branco (padrão)
G1 = O mais baixo dos andares
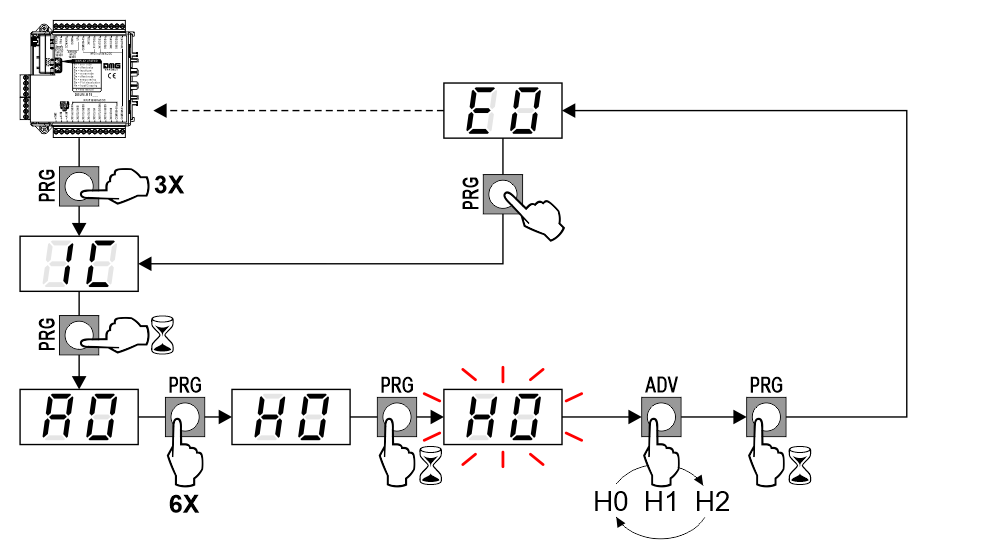
H0 = Entradas de posição: X01 ÷ X15 / Sinais: 0
H1 (padrão) = Entradas de posição: X01 ÷ X08 / Sinais: S1 ÷ S7
H2 = Entradas de posição: X01 ÷ X05 / Sinais: S1 ÷ S10
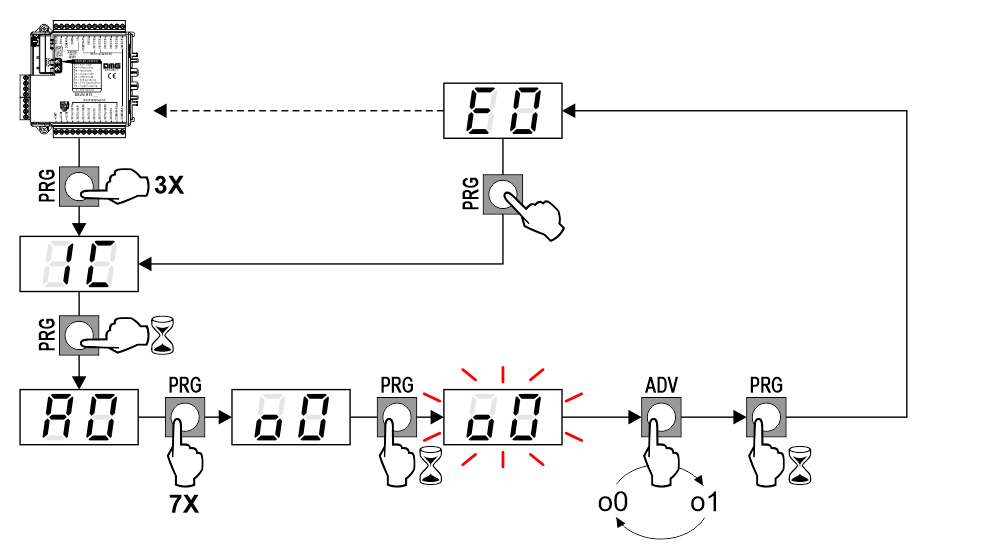
o0 (Padrão) = O codificador DEUM transmite todas as sinalizações ativas.
o1 = O codificador DEUM transmite apenas a sinalização ativa com prioridade mais elevada. A prioridade da sinalização depende do terminal: S1 = prioridade mais elevada, S10 = prioridade mais baixa
– Sinais
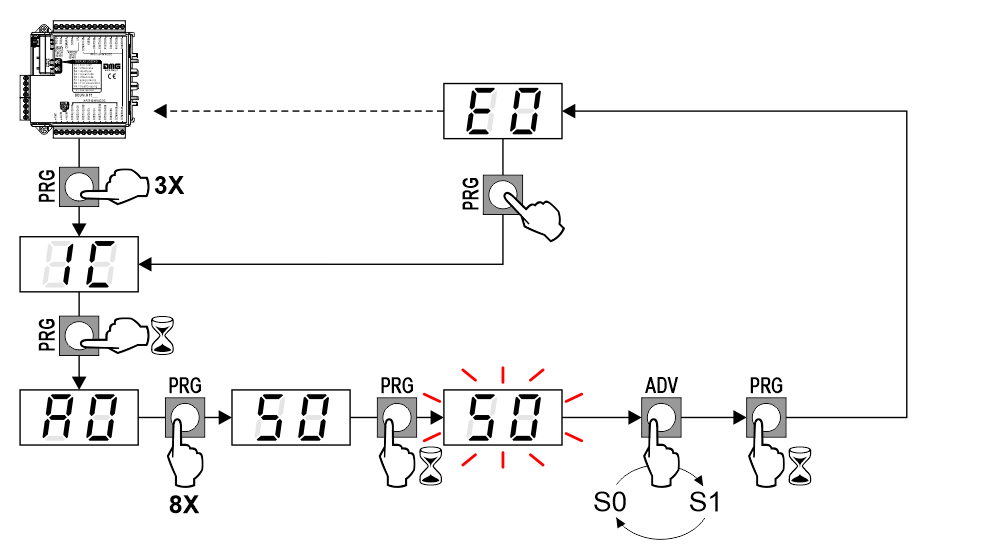
S0 = DESLIGADO (Padrão)
S1 = LIGADO (2500 ms)
– Mudança de piso
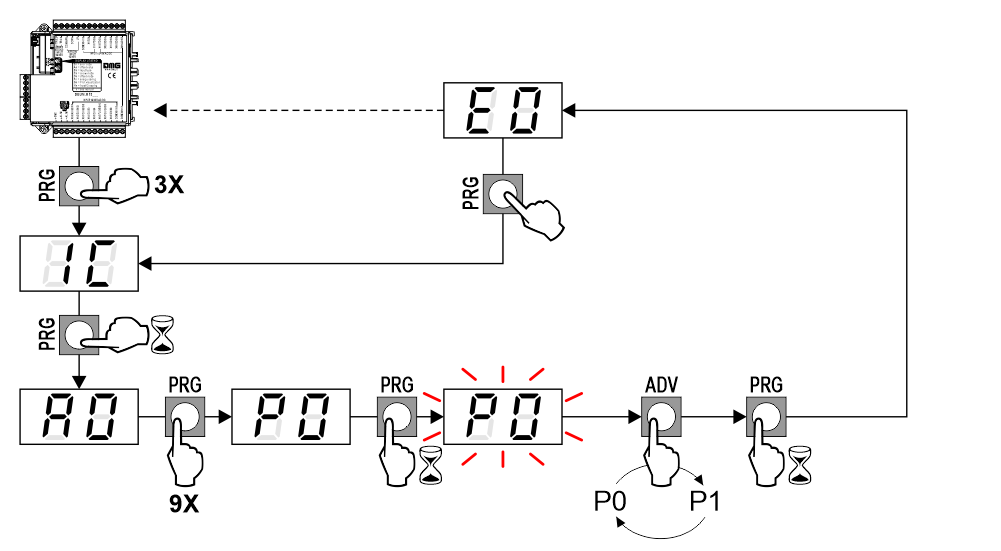
P0 = DESLIGADO (Padrão)
P1 = LIGADO (100 ms)
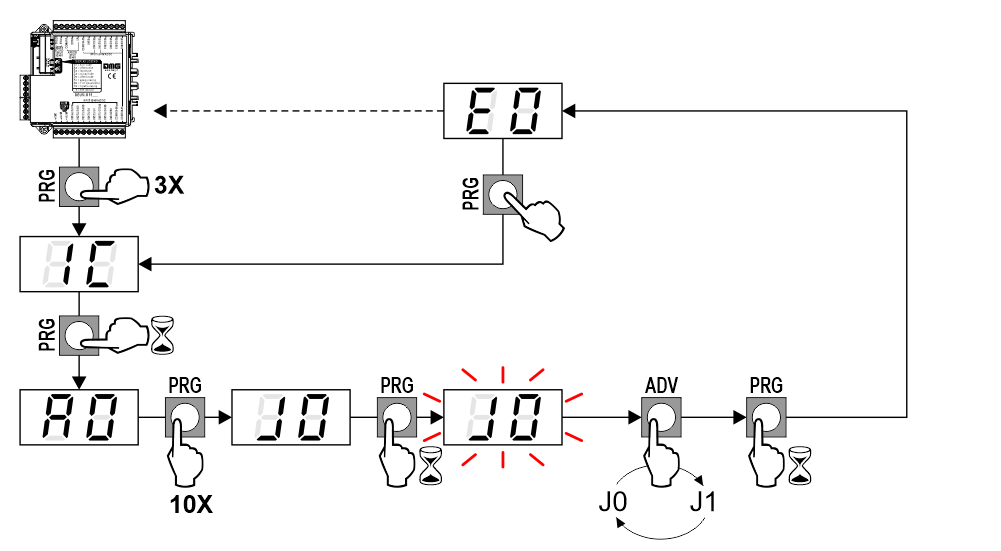
J0 = 10 kbps
J1 = 2 kbps
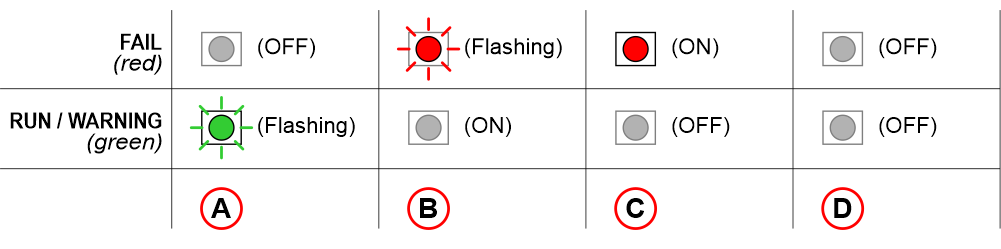
LED de autodiagnóstico e lista de erros
 O LED FAIL acende durante 1 segundo quando o codificador é ligado.
O LED FAIL acende durante 1 segundo quando o codificador é ligado.
A) – Funcionamento normal
B) – Falha detetada (consulte a «Lista deerros»abaixo)
C) – Codificador não funciona ou não está programado
D) – Encoder não funciona ou não há alimentação elétrica
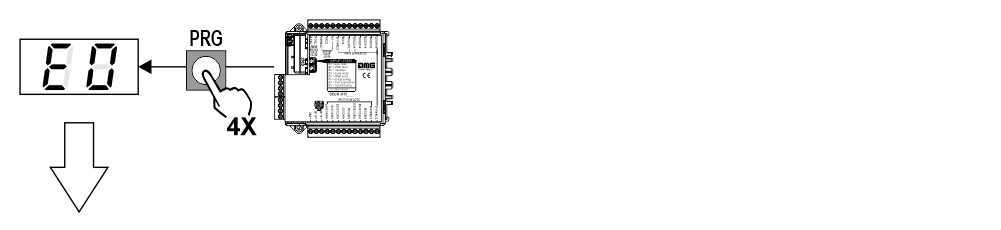
E0 = Sem erro.
E1 = Erro de protocolo de entrada desconhecido (por exemplo, Gray 7 segmentos não reconhecidos).
E2 = O resultado da verificação dos dados está incorreto: introduza novamente as configurações padrão.
E3 = Erro de entrada MEA/AUTINOR inválido (características de sinalização não reconhecidas)
E4 = Erro MEA/AUTINOR, código não recebido (passaram 3 segundos sem reconhecer qualquer sinal).
E5 = Erro na leitura do sensor
E6 = Sensor de posição à espera de reinicialização (posição não estabilizada).
E7 = O piso atual não pode ser associado a uma visualização.
E9 = Erro genérico não identificado
LE = A entrada «EME +» está ativa no codificador.
A eliminação do código ocorre automaticamente quando o erro é corrigido.
Tutorial em vídeo
| Inglês | italiano |
Download
| Referência | Versão | Link |
|---|---|---|
| 1.8 | Download (Inglês) | |
| Velocidade de transmissão do protocolo CAN BUS | 1.9 (versão atual) | Download (Inglês) |