

Emolevy
Pitagora 4.0 -järjestelmän ohjauslevy perustuu 32-bittiseen elektroniseen tekniikkaan ja käyttää kaikenlaisia sähkö- ja hydraulihissejä. Sarja- ja/tai rinnakkaisliitäntöjä voidaan lisätä painikepaneeleihin (matkustamo ja lattia). Se soveltuu erityisen hyvin VVVF:n sähköasennuksiin, myös hissiauton hallitsemattomaan liikejärjestelmään (tarkistus A3 tai EN81-20 / 50).
– Jopa 28 sarjaohjauslattiaa ja jopa 12 kerrosta rinnakkaisohjattavana
– CAN Bus -sarjalinja näytön ja sarjalaskun käyttöpaneelien liittämiseksi
– CAN Bus -sarjalinja sarjahissiauton viestintään
– etsintäkuulutin; Down Collective, Täysi kollektiivinen
– Multiplex (max 6) -järjestelmien ohjaus
– Vaihtoehtoinen tai valikoiva ovien ohjaus kulku- tai vierekkäisillä kulkujärjestelmillä
– Nostoasennon säätö magneettisilla koskettimilla, DMG-akselin inkooderi, moottori - enkooderi tai ELGO LIMAX 33 CP Absolute Positioning System
– Ohjelmointi-/diagnostiikkaliitäntä, aluksella ja/tai etänä.
– Tilan diagnostiikka, virheet, virheet ja I/O-tila
– VVVF-parametrit ja diagnostiikan käsittely (vain FUJI FRENIC LIFT LM2)
– VVVF:n edistyksellinen hallinta nopeuden, mukavuuden ja tarkan pysäytysohjauksen avulla
– Ohjelmistopäivitykset USB-laitteen kautta
– RS232-sarjajohto PC- ja GPRS-modeemiyhdyksille
– Yhteensopivuus kaikkien DMG-tuotteiden kanssa
– Yhteensopivuus kaikkien sähkö- ja hydraulijärjestelmien +A3-ratkaisujen kanssa
– Akselin käytön suojaaminen (luvaton pääsy akselille)
4.0-emolevy sisältää laitteiston ja ohjelmiston, joka mahdollistaa hissin ja kaikkien sen oheislaitteiden hallinnan. Integroitujen ja/tai etäohjelmointimoduulien kautta se mahdollistaa pääsyn kaikkiin käytettävissä oleviin ominaisuuksiin. Tulot ja lähdöt on kytketty kaikkiin elektronisiin ja sähkömekaanisiin laitteisiin ohjaimessa ja hississä.
Emolevyssä on irrotettava ohjelmointimoduuli, joka mahdollistaa kaikkien ohjauspaneelin hallinnan ja kokoonpanon perusparametrien tarkastelemisen ja muokkaamisen. VVVF:n versiossa voidaan tarkastella ja muokata myös FUJI:n perusparametrien (valikko VVVF BASE) ja edistyneen (VVVF ADVANCED menu) kokoonpanoa.
Lisätietoja ohjelmointimoduulin toiminnasta ja laajasta hallintajärjestelmän valikosta on kohdassa järjestelmän parametreja muuttavia kappaleita.
Etäohjelmointimoduuli
Vaihtoehtoinen tapa käyttää ohjaimen kokoonpanovalikkoa katselu-/muokkaustilassa on kytkeä DMG V3 Playboardin (PlayPad) irrotettava näppäimistö hissiohjauskorttiin asennettuun liittimeen PLP V3.
Tämä moduuli voidaan liittää eri tavoin:
– Kytketty suoraan
– Liitetty erillisellä jatkojohdolla suoraan levylle (konehuoneeseen)
– Kytketty hissiauton katolla (TOC) olevaan levyyn, jos hissit on kytketty DMG-esi wired-sarjalaitteisiin.
Vaihtoehtoinen tapa käyttää ohjainta perustuu Fusion Appiin.

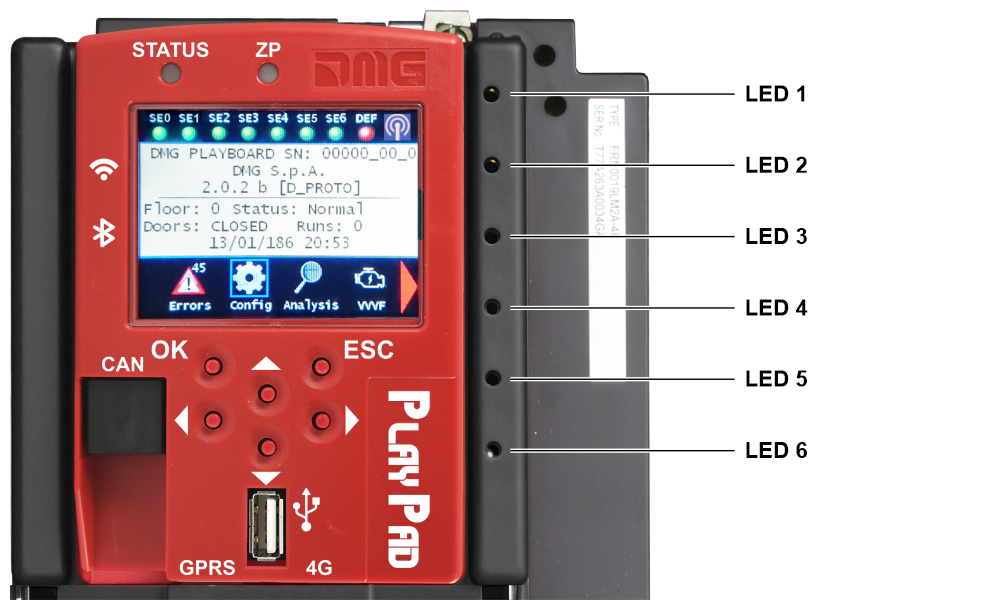
Emolevyllä on 6 lediä helppoa diagnostiikkaa varten:
LED1 (vihreä led)
CAN Multiplexin lopetus aktiivinen: led-kytkin pois päältä, kun MULX-levy on kytketty (lopetus siirtyy automaattisesti mulx-levylle ensimmäisestä ja viimeisestä multipleksiohjaimesta).
LED2 (vihreä led)
CAN Cabinen sulkeminen aktiivinen: led-kytkin pois päältä, kun valinnainen lauta (PIT8 / 16IO / 16RL) on kytketty ohjaimen sisäpuolelle (lopetus siirtyy automaattisesti viimeiselle valinnaiselle levylle).
LED3 (RGB-led)
Tämän ledin väri antaa tietoa hissin sisäisestä tilasta seuraavan taulukon mukaisesti:
| Väri | Tila |
|---|---|
| Johti pois päältä | Järjestelmä suorittaa nollausmenettelyn |
| Vihreä | Järjestelmä on normaalissa toimintatilassa |
| Keltainen | Järjestelmä on tarkastustilassa |
| Vaaleanpunainen | Järjestelmä on tilapäistoimintatilassa |
| Purppura | Järjestelmä on poissa käytöstä (hytin pysäköinti) |
| Syaani | Järjestelmä toimii prioriteettitilassa (LOP / CAR) |
| Punainen | Järjestelmä toimii palohävittäjätilassa |
| Valkoinen | Järjestelmä suorittaa hätämenettelyn |
| Sininen | Järjestelmä suorittaa hissiauton ajon ohjausmenettelyn |
LED4 (keltainen led)
Led vilkkuu, kun lauta on käynnissä.
LED5 (vihreä led)
Led-päällä antaa SE5-turvaketjun tilan
LED6 (punainen led)
| Led pois päältä | Ei vikaa aktiivinen |
| Led vilkkuu | Yksi (tai useampi) vika aktiivinen |
| Led päällä | Lukitusvika aktiivinen |

| Nimi | Kuvaus | |
|---|---|---|
| FJ1 | FUJI-liitäntä | Liitäntä vaihtosuuntaajan sisällä olevaan FUJI-liitäntään. |
| J4 | FUJI Analoginen / Sarja | Etäinvertterin yhteydessä käytettävä yhteys FUJI-kytkentään. |
| J6 | Rinnakkaiset signaalit | Yhteys APPO-hallitukseen. Se sisältää kaikki rinnakkaiset signaalit, jotka ovat käytettävissä ohjauspaneelin sisällä olevassa päätelohkossa. |
| J8 | UCM-piiri | Liitäntä piiriin UCM-ratkaisua varten. Pitagora 4.0:lla on omat sertifioidut ratkaisut UCM-ratkaisujen hallintaan hissiasennuksissa. UCM-järjestelmä koostuu kolmesta osasta: • Ilmaisin , joka havaitsee tahattoman mökkiliikkeen. • Toimilaite , miten jarrutus toteutetaan • Pysäytyslaite mikä pysäyttää matkustamon. Pysäytyslaitteen on oltava sertifioitu turvalaite, ja asentajan vastuulla on varmistaa UCM-järjestelmän eri osien yhteensopivuus. Koko järjestelmän toiminnallista todentamista sekä tilojen ja toiminta-aikojen mittaamista varten on järjestetty erityiset testit, jotka on suoritettava kokoonpanon lopussa (katso Testi ja mittaukset) Lisätietoja liitännöistä ja parametreista on UCM-piiriosiossa). Ei-tyhjentävä luettelo eniten käytetyistä UCM-järjestelmien ja -ratkaisujen tyypeistä on esitetty seuraavassa taulukossa, jossa on korostettu erilaisia soveltuvia ratkaisuja, joista jokaisella on oma käyttöliittymä ja ohjelmointipiiri. Liitäntä lueteltujen laitteiden kanssa suoritetaan asianomaisten valmistajien käsikirjoissa esitettyjen eritelmien mukaisesti. Kun absoluuttinen paikannusjärjestelmä ELGO LIMAX 33CP toimitetaan (linkki), käytetään sen sertifioitua UCM-toimintoa. Katso alla oleva "UCM-järjestelmä" -taulukko |
| J9 | Uudelleentasoitteleva piiri | Piiri, joka tekee ovien turvakoskettimen ohituksen: - Avaaminen ja/tai - Uudelleentasaus Jos kyseessä on Absoluuttisen enkooderin paikannusjärjestelmä, tätä liitintä ei käytetä. Uudelleentasaustoiminnon piirinhallinta koostuu turvamoduulista ja turvarelistä. Tämä piiri mahdollistaa ovien turvakoskettimien ohituksen, mikä mahdollistaa ohjaamon liikkumisen ovien ollessa auki pienemmällä nopeudella sallitulla alueella (ovien avaaminen) hissiauton tason alentamisen, ei tarkan hissiauton pysähtymisen tai ovien avaamisen estämiseksi. ISO-lähtö sulkeutuu GND:hen. - ISO-lähtö (turvareleen kosketusovet) avoin keräin Max 24V 100mA - Tulo CCISO (Monitor ISO-turvareleen) sulkeminen GND:hen (NC) I = 5mA - Syöttö TISO (Monitor Safty -moduuli) sulkeminen GND:hen (NC) I = 5mA - S11-S12 (vapaa kosketus) sulkeutuu ISO1:n ollessa suljettuna Turvamoduulin toinen käyttöönottosignaali tulee suoraan toisesta anturista (ISO2) ja sen on oltava lähellä GND:n kautta. |
| J10 | Light Curtain / >|< | Käytä vain täysin rinnakkaisessa kokoonpanossa. Liitäntä kaapin ruuviliittimeen. |
| J11 | Turvaketju | Yhteys SECU-tauluun. Se sisältää 7 pisteen lukeman turvaketjusta. Järjestelmä perustuu maahan liitettyyn opto-eristettyyn piiriin (SEC-levyn sisällä): - Tulo SE0 <-> SE6 opto eristetty 48 Vdc Turvapiirin yläpuolella on oltava sopivan kokoinen magneettinen katkaisija (Imax = 0,5 A). - SE0 on turvaketjun lähtökohta (ohjaimen sisällä olevan DIS-suojauksen jälkeen) - SE1 ohjaa SHAFT STOP -aluetta ja VARIKKOTARKASTUSLAATIKKOA - SE2-ohjaimet Hissiauton STOP- ja TOC-tarkastuslaatikon yläosa - SE3-ohjaimet Limit-kytkimet, turvavarusteet, ylisytetty kuvernööri - SE4 ohjaa LATTIAN ALUSTAVIA LUKKOJA - SE5 ohjaa LATTIALUKKOJA - SE6 ohjaa CAR:n ovia ja esikäynnistettyjä kosketusjärjestelmiä Jos rajakytkin tai ylispeitetty säädin tai turvavaruste on aktivoitu (turvaketjupiste SE3 avautuu), järjestelmä on poissa käytöstä. Jos haluat palauttaa sen käyttöön, sinun on palautettava SE3-virhe ohjelmointimoduulin kautta. On selvää, että yliajon lopullisen rajakytkimen turvakosketus on ensin nollattava. |
| J12 | Multiplex CAN | Liitäntä MULX-tauluun. Se sisältää CAN-linjan Multiplex-asennuksia varten. Lisätietoja liitännöistä ja parametreista on liitteessä I. |
| J13 | Auto lattialla | Signaalilähtö ovialueen anturista valosignaalia varten kaapissa. |
| J14 | Hydro-komento | Liitäntä COIL-levyyn. Se sisältää vesilaitosten liikkuvat komennot. Sitä voidaan käyttää myös etäinvertteriasennuksissa. |
| J15 | EN81-21-piiri | Liitäntä piiriin suojauksen hallitsemiseksi, jos asennus on pienempää pit: ssä. Se sisältää Bistable-piirin hallinnan ovissa ja suojalaitteissa (esikäynnistetty järjestelmä tai manuaalinen suojaus kuopassa). Lisätietoja liitännöistä ja parametreista on liitteessä IX. |
| J16 | Enkooderin sijainti | Inkrementaaliseen enkooderiin perustuva paikannusjärjestelmä: - DMG-akselin enkooderi tai Moottorin enkooderi (vain VVVF Gearless Motor Lift) Jos kyseessä on Absoluuttisen enkooderin paikannusjärjestelmä, tätä liitintä ei käytetä. |
| J18 | Ympäristön lämpötila | Liitäntä ympäristön lämpötila-anturiin. Ympäristön lämpötilansäätötoiminnon käyttämiseksi DMG-lämpötila-anturimoduuli (Cod. Q40. SND). Tämä toiminto pysäyttää järjestelmän, kun konehuoneen lämpötila laskee alle minimin tai nousee asetetun enimmäiskynnyksen yläpuolelle. |
| J19 | PME-paneeli | Liitäntä ohjauspaneeliin kaapin sisällä. |
| J20 | Ulostulon varaosa | Yleinen tuloste, jota käytetään erikoistoimintoihin. |
| J21 | Hätäpiiri | Piiri täydelliseen hätätilanteeseen tai evakuointiin jarrun avauksella. |
| J22 | Moottorin rele | Liitäntä moottorin kontaktorien releeseen (tai ota signaalit käyttöön kontaktorttoman asennuksen yhteydessä). Se sisältää myös pääyhteyshenkilöiden näytön syötteen. |
| J23 | Jarrurele | Liitäntä jarrukontaktien releeseen (tai venttiileihin hydro-asennuksen yhteydessä). Se sisältää myös jarrukontaktin näytön tuloa. |
| J25 | Paristojen testi | Yhteys CHAR-tauluun. Se sisältää signaalit: - Paristojen tyhjeneminen - Vaihesekvenssi (vain Hydro) - Varmuuskopiointitila |
| J26 | Valinnaiset taulut | DMG Valinnainen levy: - Rinnakkaiset esivaivat painikkeet (PIT8) - 16 releen lähtölevy (16RL): Laajennuskortti on välttämätön erityisesti rinnakkaisten näyttöjen ajamiseen (1 johto / lattia, 1 johto / segmentti, harmaa koodi, binääri) suorina lähtöinä - 16 tulo-/lähtökortti (16IO) |
| M1 | Virtalähde | Virtalähteen kaupalliselta vakiintuneilta sähköntoimittajalta. Virtapiirien ja akkulaturin negatiivinen napa on kytkettävä maahan. Sisäinen kellon virtalähde: Super Kondensaattori (autonomia 5 päivää ilman virtalähdettä). |
| UCM-järjestelmä | |||
|---|---|---|---|
| Järjestelmän tyyppi | Ilmaisin | Toimilaite | Pysäytyslaite |
| Sähköinen hissi. Ei liikkeitä avoimilla ovilla. | Ei vaadita. (vain jarrujen monitori) | ||
| Sähköinen hissi. Liikkeet avoimilla ovilla. | Pitagora 4.0 | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Jarrut (*) |
| Sähköinen hissi. Liikkeet avoimilla ovilla ELGO LIMAX 33CP: llä | ELGO LIMAX 33KP | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Jarrut (*) |
| Sähköinen hissi. Over Speed Governor ja ajelehtimisenestolaite (**) | Pitagora 4.0 | Tapin virtakatkos. | Turvavarusteet |
| Sähköinen hissi. Over Speed Governor ja ajelehtimisenestolaite (**) ja ELGO LIMAX 33CP | ELGO LIMAX 33KP | Tapin virtakatkos. | Turvavarusteet |
| Hydraulinen nostin kaksoislaskuventtiilillä | Pitagora 4.0 | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Venttiilit (***) |
| Hydraulinen nostolaite kaksoislaskuventtiilillä ja ELGO LIMAX 33CP | ELGO LIMAX 33KP | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Venttiilit (***) |
| Hydraulinen hissi elektronisella venttiilinhallinnalla (sertifioitu ohjausyksikkö) | Pitagora 4.0 | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Venttiilit (***) |
| Hydraulinen nostin elektronisella venttiilinhallinnalla (sertifioitu ohjausyksikkö) ELGO LIMAX 33CP:llä | ELGO LIMAX 33KP | Jarrujen hallintalaitteiden keskeytys (turvaketju auki) | Venttiilit (***) |
(*) ratkaisu, jota voidaan soveltaa yksinomaan kaksoisjarruihin, jotka on sertifioitu UCM-pysäytyselementiksi standardien EN81-20 5.6.7.3 ja 5.6.7.4 mukaisesti (vaihteettomat moottorit tai moottorit, joissa on vaihteisto ja hidasakseliset jarrut).
(**) UCM-sertifioidut rajoittimet, joissa on ajautumisenestotappi (esimerkiksi Montanari RQxxx-A, PFB LKxxx LSP-kelalla tai vastaavat laitteet).
(***) Sarjan venttiilit, jotka on sertifioitu pysäytyselementiksi UCM standardien EN81-20 5.6.7.3 ja 5.6.7.4 mukaisesti
Ohjelmointivalikko ja Järjestelmäparametrien muuttaminen
V3-näytön valikkokartta
| NOSTON OHJAUSKORTTI DMG S.p.A. | Kieli? Ranska, Englanti, Portugali, Italia, Venäjä, Saksa, Hollanti ENTER: vahvista / ESC: poistu |
|
| ▲ ▼ | ▲ | |
| Koodi? ** Salasana ** | ENTER----- ----> | Järjestelmän tila |
| ▲ ▼ | ||
| Viat | ||
| ▲ ▼ | ||
| I/O-tila | ||
| ▲ ▼ | ||
| Konfiguraatio | ||
| ▲ ▼ | ||
| Ovet | ||
| ▲ ▼ | ||
| Signaaleja | ||
| ▲ ▼ | ||
| Erikoistoiminnot | ||
| ▲ ▼ | ||
| Asemointi | ||
| ▲ ▼ | ||
| VVVF | ||
| ▲ ▼ | ||
| Rec.Parameters | ||
| ▲ ▼ | ||
| Kello |
"Järjestelmän tila" -valikko
Siihen pääsee helposti PlayPadin pääikkunasta painamalla ENTER-näppäintä kerran.
| Järjestelmän tila | Kuvaus | Visualisointi Sarjanäyttö |
|---|---|---|
| Nollaus | Järjestelmä suorittaa nollausmenettelyn | O - |
| Käytössä | Järjestelmä on normaalissa toimintatilassa | |
| Tarkastus | Järjestelmä on tarkastustilassa | TAI |
| Temp. Operat | Järjestelmä on tilapäistoimintatilassa | P |
| Poissa käytöstä | Järjestelmä on poissa käytöstä | |
| Auton prioriteetti | Järjestelmä toimii hissiauton prioriteettitilassa (prioriteettinäppäinkytkin aktivoitu) | |
| Palomiehet | Järjestelmä toimii palohävittäjätilassa (erilaisia toimintoja) | |
| Hätä | Järjestelmä suorittaa hätämenettelyn | E |
| Drift-ohjaus | Järjestelmä suorittaa hissiauton ajon ohjausmenettelyn | |
| Ylöspäin suuntautuva toiminta | Järjestelmä toimii ylöspäin | |
| Alaspäin suuntautuva toiminta | Järjestelmä toimii alaspäin | |
| Uudelleentasaus | Hissiauto on lattiatasolla ja tasaantyy | |
| Yhä lattialla | Hissiauto on lattiatasolla ilman rekisteröityjä puheluita | |
| Nopea | Järjestelmä toimii suurnopeustilassa | |
| Alhainen nopeus | Järjestelmä toimii alhaisen nopeuden tilassa | |
| Oven sulkeminen | Ovi on täysin kiinni | |
| Ovi auki | Ovi avataan (tai avataan/suljetaan) | |
| Auton täysi kuorma | Hissiauto on ladattu täyteen | |
| Valokenno A | Valokennon sisäänkäynnin A kannalta merkityksellinen tulo on aktiivinen | |
| Valokenno B | Valokennon sisäänkäynnin B kannalta merkityksellinen tulo on aktiivinen | |
| BRA-painike | Sisäänkäynnin A avoimen oven painikkeen tulo on aktiivinen | |
| BRB-painike | Sisäänkäynnin B avoimen oven painikkeen kannalta merkityksellinen tulo on aktiivinen |
"Viat" -valikko
Tässä valikossa luetellaan ohjaimen sisäiseen muistiin tallennetut 60 viimeistä vikaa. Kaikki viat on kuvattu Vianmääritys -osassa.
VAROITUS: Jos muisti pimentyy, sisäinen muisti tallennetaan vain, jos akku on kytketty.
| Kerros 0 12:30:56 < Faults > | ENTER----- ----> | Kerros 0 < Faults > Ei vikoja | ||
| ENTER----- ----> | Kerros 0 < Faults > Viat: 4 Näyttö? | ENTER----- ----> | < Faults > 3/4 43 = Tarkastus Pos.: 0 # 1 Turska. 0 17/03/09 10:10 * (katso lisätietoja alla) |
|
| ▲ ▼ | ||||
| Nollaa kaikki tallennetut viat (vahvista painamalla ENTER-näppäintä) HUOMAUTUS: viat poistetaan kun hissihytti pysähtyy | Kerros 0 < Faults > Viat: 4 Nollata? | |||
| ▲ ▼ | ||||
| Poista rajakytkimessä havaittu virhe (vahvista painamalla ENTER-näppäintä) HUOMAUTUS: varsinainen peruutus tapahtuu vain muistijärjestelmässä on pysäytetty | Kerros 0 < Faults > Viat: 4 Nollataanko XXX? (katso alla oleva taulukko) | |||
| Vika | Kuvaus |
|---|---|
| Nollaa SE3 | Rajakytkimen vika; voit tyhjentää sen vasta turvaketjun sulkemisen jälkeen. |
| Nollaa 82212 | Drift-ohjaus |
| Nollaa RSP | RSP-vika; pienempään kuoppaan ja päätilaan. |
| Nollaa UCM | UCM-vika; A3-muutos |
| Nollaa ISO | ISO-vika; ongelmien havaitseminen turvamoduulin toiminnan seurannassa oven edistyneeseen avaamiseen / uudelleentasaustasaus. |
| Nollaa SCS | SCS-vika; asennus 81-20. |
| Palauta miehittämättömän ilma-alusjärjestelmän | Ammattikorkeakoulun vika; Erityinen toiminto. |
I/O-tila-valikko
 | ----->>>>> |  | ----->>>>> | Kerros 0 - 12:30:56 < I/O Status > |
| Pelto | Kuvaus | Navigointi | Arvot (12 ryhmän ryhmä) | ||||
|---|---|---|---|---|---|---|---|
| Autopuhelu | Hissiautopuhelun simulointi | ▲▼ (Valitse lattia) ENTER (vahvista) ESC (poistuminen) | |||||
 Playboard IN-OUT | Järjestelmän tulot/lähtö □ = Avaa yhteystieto ■ = Suljettu kosketin | ▲▼ (Muutosryhmä) ENTER (poistu) ESC (poistuminen) | RYHMÄT | ||||
| 1/9 | REM VHS SUR | PUNAINEN TH1 COM | LISÄTÄ KIERROKSIA TH2 LE | REV1 REV2 LTMP |
|||
| 2/9 | RMO BRK RDE | RGV RMV RPV | MTR YBRK CCF | CCO CCOB |
|||
| 3/9 | RINTALIIVIT FOA ROA | CEA FFA RFA | BRB KELLONPERÄT RYÖSTÄÄ | CEB FFB RFB |
|||
| 4/9 | HS BFR OTM | PCA | POM RPH J20 | CPOM IEME OEME |
|||
| 5/9 | FLM FLD | Pyörä GNGM GNGD | 511B 511L | DSA 212B E511 |
|||
| 6/9 | PWR ENAB | IN_A IN_D | BR1 BYPL | BR2 BYPC |
|||
| 7/9 | FAI ZP | FAS TISO | CAM ISO | AGH AGB CISO |
|||
| 8/9 | REM REM1 REM2 | PUNAINEN PUNAINEN 1 PUNAINEN 2 | PME OVS | LISÄTÄ KIERROKSIA REV1 REV2 |
|||
| 9/9 | L-PUNAINEN L-VIHREÄ SUMMERI | GPIO1 GPIO2 GPIO3 |
|||||
 VVVF SISÄÄN-ULOS | VVVF-tulot/lähtö □ = Avaa yhteystieto ■ = Suljettu kosketin | ▲▼ (Muutosryhmä) ENTER (poistu) ESC (poistuminen) | RYHMÄT | ||||
| 1/8 | EN FWD LISÄTÄ KIERROKSIA | X1 X2 X3 | X4 X5 X6 | X7 X8 0,0 V |
|||
| 2/8 | Y1 Y5A/C | Y2 RST | Y3 30 A/B/C | Y4 | |||
| 3/8 | VARATTU ACC JOULUKUU | ALM INT BRK | EXT NUV RL | TALLIUM VL IL |
|||
| 4/8 | Fout = 0,00 Hz Uout = 0,00 A Vout = 0,00 V |
||||||
| 5/8 | Fref = 0,00 Hz EDC ---V NST---- | Fref = 0,00 Hz Trq --% NST ---h |
|||||
| 6/8 | Imax = 0,00 A Enkooderi 0 P/s --- kW MAIN = |
||||||
| 7/8 | Vika VVVF 0 = --- 2 = --- | Vika VVVF 1 = --- 3 = --- |
|||||
| 8/8 | I-bal = 0,00 A I-com = 0,00 A I-sur = 0,00 A |
||||||
 Painikkeet | Puhelupainikkeiden tila □ = Painiketta ei ole aktivoitu ■ = Painike aktivoitu | ▲▼ (Muutosryhmä) ◄► (Ohjaamo/alas/ylös) ENTER (poistu) ESC (poistuminen) | RYHMÄT | ||||
| Hytin puoli A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Hytin puoli B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Painike alapuoli A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Painike alapuoli B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Ylöspäin sivu A | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Ylöspäin puoli B | 7 3 | 6 2 | 5 1 | 4 0 |
|||
| Kortit AUX | Kortit AUX-tulot/lähtö □ = avoin kosketus ■ = Suljettu kosketin | ▲▼ (Vaihda sivua) ENTER (Poistu) ESC (Poistu) | KORTIT 16 IO IN | ||||
| 1/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 2/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 3/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 4/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| KORTIT 16 IO OUT | |||||||
| 5/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 6/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 7/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 8/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| KORTIT 16 IO RL | |||||||
| 9/12 | 1.08 | 1.07 | 1.06 | 1.05 | |||
| 1.04 | 1.03 | 1.02 | 1.01 | ||||
| 10/12 | 1.16 | 1.15 | 1.14 | 1.13 | |||
| 1.12 | 1.11 | 1.10 | 1.09 | ||||
| 11/12 | 2.08 | 2.07 | 2.06 | 2.05 | |||
| 2.04 | 2.03 | 2.02 | 2.01 | ||||
| 12/12 | 2.16 | 2.15 | 2.14 | 2.13 | |||
| 2.12 | 2.11 | 2.10 | 2.09 | ||||
| BDU-tulot | BDU-tulot □ = avoin kosketus ■ = Suljettu kosketin | ▲▼ (Vaihda sivua) ◄► (Muuta ryhmää) ENTER (Poistu) ESC (Poistu) | Ryhmä: Avain 1, Avain 2, Avain 3, Avain 4. Kunkin ryhmän osalta näytetään yhteyshenkilön tila kunkin suunnitelman osalta. |
||||
 Soiton rekisteröintiluettelo | Soiton rekisteröintiluettelo □ = Puhelua ei ole rekisteröity ■ = Puhelu rekisteröity | ▲▼ (Muutosryhmä) ◄► (Ohjaamo/alas/ylös) ENTER (poistu) ESC (poistuminen) | Samat ryhmät kuin PAINIKKEELLA | ||||
| [0] Alku = ... [1] Alku = ... [2] Alku = ... | Suorita laskurit [0] Osittainen (nollattava) [1] Yhteensä [2] Tuleva käyttö | ◄► (Muutos) ENTER (nollaa ja lopeta) ESC (poistuminen) | Esitetty päivämäärä viitataan osittaisen laskurin viimeiseen nollaukseen [0] | ||||
| Analoginen | Analogiset toimenpiteet | ▲▼ (Muuta sivua) ESC (poistuminen) | 24 V = Virtalähde VCAB = Kaapin ja hytin absorptiot VMR = BDU-absorptiot 24VT = Paristot Jännite +5,0 V = Levyn sisäinen virtalähde TAMB = Ympäristön lämpötila-anturi PWM = Analoginen nopeuslähtö |
||||
| TOC-toimenpiteet | Analogiset toimenpiteet | ▲▼ (Muuta sivua) ESC (poistuminen) | T_SHA = Akselin lämpötila PÄÄ = TOC-virtalähde COP_A = COP-puolen A absorptiot COP_B = COP-puolen B absorptiot |
||||
| COP-toimenpiteet | Analogiset toimenpiteet | ▲▼ (Muuta sivua) ESC (poistuminen) | MAIN_A = COP A -virtalähde MAIN_B = COP B -virtalähde T_CAR = Cabinen lämpötila |
||||
| FLOORS-linja | BDU Viestintälinja | ENTER (nollaus) ESC (poistuminen) | Virhe: Tietoliikennevirheen numero FER: Kehyksen virhenopeus Viimeisimmän nollauksen päivämäärä ja tunti |
||||
| CAR-linja | TOC / POLIISI Viestintälinja | ENTER (nollaus) ESC (poistuminen) | Virhe: Tietoliikennevirheen numero FER: Kehyksen virhenopeus Viimeisimmän nollauksen päivämäärä ja tunti |
||||
| MTPX-linja | MULTIPLEX Viestintälinja | ▲▼ (Muuta sivua) ENTER (nollaus) ESC (poistuminen) | Virhe: Tietoliikennevirheen numero FER: Kehyksen virhenopeus Viimeisimmän nollauksen päivämäärä ja tunti |
||||
| ELGO-malli: | ELGO: n diagnostiikka | ||||||
PLAYBOARD IN-OUT -taulukon kuvausparametrit
| Tulo | Kuvaus |
|---|---|
| SE0 | Turvaketjun alku |
| SE1 | Turvaketjun kuopan turvakoskettimet |
| SE2 | Hissiauton katsastuksen turvaketjun yläosa Laatikko/Pysäytys |
| SE3 | Turvaketjun lopullinen rajakytkin, turvavarusteet, nopeudensäädin |
| SE4 | Turvaketjuhallin ovet alustavat koskettimet |
| SE5 | Turvaketjuhallin ovien sisälukon sisälukon |
| SE6 | Turvaketjun hissi auton ovien koskettimet ja esikäynnistinlaite (81-21) |
| CCO CCOB | tehokontaktin ohjaus |
| CISO | Monitori ISO-rele |
| TISO | Turvallisuusmoduulin SM1-ohjaus |
| LE | Hätävalo (hissiauton valon virtalähde) |
| BFR | oven sulkemispainike |
| PCA | Hissiauton prioriteettitoiminto |
| POM | Palomiesten toiminta (Hallin avainkytkin) |
| CPOM | Palomiesten toiminta (autonavaimen kytkin) |
| SUR | Ylikuormituksen hallinta |
| COM | Täysi kuormituksen hallinta |
| HS | palvelun ulkopuolelle -toiminto |
| ZP | ovivyöhykkeen signaali |
| RPH | Vaihesarjan ohjaus |
| LISÄTÄ KIERROKSIA REV1 REV2 | Tarkastustoiminto (konehuone) Tarkastustoiminto (auton yläosa) Tarkastustoiminto (PIT) |
| REM REM1 REM2 | Tarkastus (konehuone) Tarkastus ylös (auton yläosa) Tarkastus ylös (PIT) |
| PUNAINEN PUNAINEN 1 PUNAINEN 2 | Tarkastus alas (konehuone) Tarkastus alas (auton yläosa) Tarkastus alaspäin (PIT) |
| TH1 TH2 | Moottorin (öljy) lämpötila-anturin ohjaus |
| IEME | Hätätilanne (virransyöttövika) |
| PME | PME-valitsin (hätäevakuointi) |
| AGH AGB | Ylin hidastuskytkin Pohja hidastuskytkin |
| FAS FAI | Paikannusanturit (ei koodarin paikannusjärjestelmää) |
| E511 | Valinnainen tulo akselin pääsyyn |
| BYPL BYPC | Oven turva Ohitusvalitsin |
| RINTALIIVIT | Oven avoin painike (sisäänkäynti A) |
| CEA | Valokennon sisäänkäynti A |
| FOA | Oven avoin rajakytkimen sisäänkäynti A |
| FFA | Oven sulkemisrajakytkimen sisäänkäynti A |
| BRB | Oven avoin painike (sisäänkäynti B) |
| CEB | Photocellin sisäänkäynti B |
| KELLONPERÄT | Oven avoin rajakytkimen sisäänkäynti B |
| FFB | Hieno corsa chiusura (Porta B) |
| BR1 | Jarru 1 näytön kytkin |
| BR2 | Jarrun 2 näytön kytkin |
| IN_A IN_D | Seuraa UCM-piiriä |
| Tuotos | Kuvaus |
|---|---|
| VHS | Lähtö - järjestyksen vastainen valaistus |
| RMV | Lähtö – keskitason nopeuskomento |
| BRK | Lähtö - Jarrukomento |
| MTR | Lähtö - Moottorin komento |
| YBRK | Lähtö - jarrukomento (VVVF) |
| ISO | Tuloste - Uudelleentasauskomento |
| RGV | Lähtö - nopea komento |
| RPV | Lähtö - hidas nopeuskomento |
| RMO | Output - ylös matkakomento |
| RDE | Lähtö - alas matkakomento |
| LTMP | Lähtö - aikarajoitettu hissiauton valokomento |
| CAM | Output - lennokekomento jää eläkkeelle |
| OEM | Lähtö - hätäkomento |
| CCF | Lähtö - Moottorin vaiheen oikosulku |
| J20 | Lähtö - ohjelmoitava (liitin J20) |
| DSA | Lähtö - hälytykset deaktivointi |
| 511B | Lähtö - Norm 511 Summeri |
| 511L | Lähtö - Norm 511 Light |
| 212B | Lähtö - Norm 212 Summeri |
| FLD | Tuloste - alanuolit-komento |
| FLM | Tuloste - ylänuolet-komento |
| GNGD | Lähtö - ylöspäin suuntautuva gong-komento |
| GNGM | Lähtö - alaspäin suuntautuva gong-komento |
| PYÖRÄ | Lähtö – BIP-signalointi matkustamossa |
| PWR | UCM-moduulin virtakomento |
| ENAB | UCM-moduuli ottaa komennon käyttöön |
| ROA | Lähtö - oven avoin komento (sisäänkäynti A) |
| RFA | Lähtö - oven sulkemiskomento (sisäänkäynti A) |
| RYÖSTÄÄ | Lähtö - oven avoin komento (sisäänkäynti B) |
| RFB | Lähtö - oven sulkemiskomento (sisäänkäynti B) |
| L-PUNAINEN | Liikennevalon merkkivalo 81-20/21 |
| L-VIHREÄ | Liikennevalon merkkivalo 81-20/21 |
| SUMMERI | Summerisignaali ohitus 81-20 |
VVVF IN-OUT -taulukon kuvausparametrit
| Signaali | Kuvaus |
|---|---|
| EN | Ota digitaalinen tulo käyttöön (ruuviliitin FI) |
| FWD | Ylöspäin digitaalinen tulo (ruuviliitin FWD) |
| LISÄTÄ KIERROKSIA | Alaspäin digitaalinen tulo (ruuviliitin REV) |
| X1 | Nopea digitaalinen tulo (ruuviliitin X1) |
| X2 | REV-nopeuden digitaalinen tulo (ruuviliitin X2) |
| X3 | Hidas digitaalinen tulo (ruuviliitin X3) |
| X4 | Ingresso digitale (morsetto X4) |
| X5 | digitaalinen tulo (ruuviliitin X4) |
| X6 | Ingresso digitale (morsetto X6) |
| X7 | Ingresso digitale (morsetto X7) |
| X8 | Digitaalinen hätätulo (ruuviliitin X8) |
| 0,0 V | Analoginen VVVF-tulo (liittimet 11-12) |
| Enkooderi | Enkooderin VVVF-tulo (suljettu silmukka) |
| PÄÄ | VVVF-laiteohjelmistoversio |
| Y1 | Digitaalinen lähtö (pääte Y1) |
| Y2 | Digitaalinen lähtö (pääte Y2) |
| Y3 | Digitaalinen lähtö (pääte Y3) |
| Y4 | Digitaalinen lähtö (pääte Y4) |
| Y5A/C | Jarrujen komentoreleet (liitin Y5) |
| 30 A/B/C | Relè (terminaali 30 A/B/C) |
| ALM | Hälytyksen VVVF-signalointi |
| RST | Nollaa VVVF |
| ACC | Kiihtyvyys |
| JOULUKUU | Hidastus |
| Fout | Lähtötaajuus |
| Vout | Lähtöjännite |
| Iout | Tulostusvirta |
| Imax | Suurin lähtövirta |
"Kokoonpano" -valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Configuration > |
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Väliaikaiset toiminnot | Järjestelmän väliaikainen toimintatapa | ◄► (Valinta) | Ei; Kyllä | Ei |
| Testi | Tarkastusten ja asennuksen käynnistämisen helpottamiseksi. Katso kuvaus liitteestä II. | |||
| Koodi? | Salasanasuojaus ohjelmoinnin käyttämiseen | ◄► (Merkkien vaihtaminen) ▲▼ (Valitse merkit) | 8 merkkiä (0 - 9; A - Z; a - z ) | ei salasanaa |
| Konfiguraatio | Johdotuksen kokoonpanon tyyppi: -) Vakiolankaliittimet (auto ja lattiat); -) Sarjaliikenne hissiautossa, 1 linja-/lattialiittimet lattiassa; -) Hissiauton johtoliittimet, sarjaviestintä lattioissa (BDU-moduulit); -) Sarjaviestintä hissiautoille ja lattioille | ◄► (Valinta) | Auto & fl. sukupuolitauti; Auto SER. / Fl. RJ45; Auton STD. / Fl. BDU; Auto SER. / Fl. BDU | Auto SER / Fl. RJ45 |
| Ohjausobjektin tyyppi | Hissin hallintatyyppi | ◄► (Valinta) | -SAPB; -SAPB-tietue -SAPB vakiopaine -Down kollektiivi; -Täysi kollektiivi; | SAPB; |
| Ajaa | Pidon tyyppi: -) Veto VVVF -) Hydraulinen - Motor Direct (Dir): Voidaan käyttää myös silloin, kun VVF on aktivoitu vain UP-suunnassa. -) Hydraulinen - moottorin pehmeä käynnistin (S-S): -) Hydraulinen - Moottoritähti Delta (Y-D): -) Hydraulinen - Moottori invertterillä (VVF): Moottorin kontaktorit aktivoituvat YLÖS- ja ALAS-suunnassa. | ◄► (Valinta) | Veto Hydraulinen Dir Hydraulinen S-S Hydraulinen Y-D Hydraulinen VVF | Veto |
| Ei. lattiat | Laitoksen kerrosten lukumäärä | ▲▼ (lisäys/vähennys) | 2 <-> 16 (std.) 2 <-> 32 (vain BDU) | 2 |
| Uudelleentasaus | Ei ole läsnä: Ei tasausta Tyyppi 1: (avaa tai sulje ovi). Tämä asetus on tarkoitettu vetoasennuksille, jotka ovat hyvä pysäytystarkkuus. Uudelleentasaus käynnistyy, kun hissiauto lähtee paikaltaan "täydellisesti lattialla", toisin sanoen, kun toinen kahdesta palkista keskeytyi. Uudelleentasaus päättyy, kun molemmat palkit ovat vapaita. VAROITUS: tämä asetus ei sovellu hydraulisiin asennuksiin pumppausvaikutuksen riskin vuoksi (hissiauto ajautuu alas pysähtymisen jälkeen) Tyyppi 2: (avaa tai sulje ovi). Tämä asetus on tarkoitettu hydrauliasennuksille ja toimii tyypin 1 mukaisesti, paitsi että nämä kaksi palkkia on keskeytettävä ennen uudelleentasaus alkaa. Uudelleentasaus päättyy, kun molemmat palkit ovat vapaita. VAROITUS: suositellaan sellaisten anturien käyttöä, joiden palkkien välinen etäisyys on pienempi (TMS03 = 20 mm). Tyyppi 3: 1 palkin palkki avoin ovi 2 palkkia suljettu ovi. Tämä asetus mahdollistaa vaaitus 1 säteen, lattiaoven auki (hissiauton valo päällä) ja vaaitus 2 palkkia, lattiaovi suljettu (hissiauton valo pois päältä). VAROITUS: jos haluat käyttää tasausluukkua auki riippumatta siitä, minkä vaihtoehdon olet valinnut, on tarpeen siirtää ovien turvallisuutta hyväksytyllä järjestelmällä. Huomautus: Encoderin paikannusjärjestelmässä näytetään uudelleentasausetäisyyden | ◄► (Valinta) | Ei läsnä Tyyppi 1 Tyyppi 2 Tyyppi 3 | Ei läsnä |
| Pääkerros | Pääkerroksen sijainti (kaikki tämän kerroksen alla olevat puhelut tarjoillaan vain ylöspäin (vain alaspäin kollektiivisesti) | ▲▼ (lisäys/vähennys) | 0 <-> Kerroksen nro | 0 |
| Alhaisen nopeuden vika-aika | Aika ennen alhaisen nopeuden vian aktivointia (hidas nopeus liian pitkä) | ▲▼ (lisäys/vähennys) | 7 s <-> 40 s | 7 s |
| Käyttöaika | Aika ennen ajoaikavikojen aktivointia | ▲▼ (lisäys/vähennys) | 20 s <-> 45 s | 20 s |
| Asennuksen tyyppi | Asennustyyppi (Simplex / Multiplex / Multiplex LIGHT) Multiplex LIGHT: lla on jaettu yksi BDU-linja kahdelle hissille, joissa on oma sinalisaation johdotus. | ◄► (Valinta) | Simplex; Multipleksi; MULTIPLEKSI LIGHT | Simpleksi |
| Multiplex-kokoonpano | Multipleksikokoonpano: Noston numero(LN); Painikelinja (PBL); Kerrokset multipleksinä; Alku. Katso kuvaus Multiplex-ratkaisuista. | ◄► (Valitse parametri) ▲▼ (Muuta arvoa) | - Hissin nro (LN).: 1<->4 Painikelinja (PBL): 0(1 rivi)<->3(4 riviä) | (LN). (PBL): 1.0 |
| - Kerrokset: 2 <-> 16 [32] - Ofst 0 <-> Ei° kerrokset | Flrs. : 2 Ofst : 0 |
|||
| Multiplex Kutsua | Multipleksiasennuksissa lattiakutsu voidaan erottaa pitkällä painikepaineella (yli 3 sekuntia) soittamalla: a) Asennus, jossa on alempi "Lift No (LN)" -parametri (esimerkiksi jos on kaksipuolinen asennus, jossa on suuri hytti vammaisille matkustajille ja pienempi, suurempi on asetettava "1" ja toinen "2"; b) Epäsymmetrisessä lattianjakojärjestelmässä asennus, joka voi saavuttaa alimman/korkeimman tason. | ◄► (Valinta) | Ei (0, 1, 2, 3) Kyllä (0, 1, 2, 3) | Ei |
"Ovet" -valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Doors > |
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Ret. ramppi päällä | Aika ennen eläkkeelle jäävän rampin aktivointia | ▲▼ (lisäys/vähennys) | 0,1 s <-> 9,9 s | 0,1 s |
| Ret. ramp off | Aika ennen eläkkeelle jäävän rampin deaktivointia | ▲▼ (lisäys/vähennys) | 0,1 s <-> 9,9 s | 0,1 s |
| Lukitse vika-aika | Aika ennen lukitusvirheen aktivointia | ▲▼ (lisäys/vähennys) | 2 s <-> 60 s | 15 s |
| Oven avaamisen viive | Aika ennen oven avaamista – automaattiselle ovelle | ▲▼ (lisäys/vähennys) | 0,1 s <-> 9,9 s | 0,5 s |
| Pysäköintiaika avoimella ovella | Hissin pysäköintiaika avoimella ovella (sekunnissa) | ▲▼ (lisäys/vähennys) | 1 s <-> 30 s | 7 s |
| Puhelujen sulkemisaika | Aika (sekunnissa) ennen oven sulkeutumista rekisteröityjen puhelujen tapauksessa | ▲▼ (lisäys/vähennys) | 1 s <-> 60 s | 2 s |
| Ovet Nb. | Ovien lukumäärä ja tyyppi | ◄► (Valinta) | -1 ovi -2 ovea simult. -2 ovea sel. -2 ovea sel+through | 1 pääsy |
| Tyyppi Ovi A | Sisäänkäynnin A ovityypin valinta: 1) Manuaalinen / Ei läsnä: manuaaliset ovet lattioissa, hissiauton ovien käsikirja tai ei; 2) Autoriippumaton: manuaaliset ovet lattioissa, hissiauton ovet itsenäiset; 3) Auto automaattinen: manuaaliset ovet lattioissa, hissiauton ovet automaattiset; 4) Yhdistetty auto: automaattiset ovet hissiautossa ja lattioissa | ◄► (Valinta) | Manuaalinen / ei läsnä; Auto riippumaton; Auto automaattinen; Yhdistetty automaattinen | Yhdistetty automaattinen |
| Ovi A rajakytkimellä | Oven A rajakytkin (ei ole manuaalisissa ja erillisissä ovissa) | ◄► (Valinta) | Ei; Kyllä (EI) Kyllä (NC) | Ei |
| Valitse ovi A lattiasta | Oven A kokoonpano jokaiselle kerrokseen: aseta pääsy jokaiseen kerrokseen ja avoin tai sulje ovipysäköinti lattialla (automaattisia ovia varten) | ◄► (Valinta) ▲▼ (Vaihda lattia) | Ei; Pkg. Ovi kiinni; Pkg. Ovi auki | Pkg. Ovi kiinni; |
| Ovi A Avaa/Sulje aika | Ovi A ilman rajakytkintä: oven avaamis- / sulkemisaika | ▲▼ (lisäys/vähennys) | 1 s <-> 60 s | 10 s |
| Ovi A käynnistysviive | Ovi Käsikirja: aika ennen käynnistystä | ▲▼ (lisäys/vähennys) | 0,1 s <-> 9,9 s | 2,0 s |
| Liukastumisovi A | Ovi A rajakytkimellä: aika ennen liukastumisvirhettä | ▲▼ (lisäys/vähennys) | 1 s <-> 60 s | 10 s |
| Ovi A toimiva | Ovi A toimii juoksun aikana. Ei oteta huomioon manuaalisissa tai itsenäisissä ovissa | ◄► (Valinta) | Ei Kyllä Kyllä AT40 | Ei |
| Tyyppi Ovi B | Sisäänkäynnin B ovityypin valinta (katso tyyppi ovi A): | ◄► (Valinta) | Manuaalinen / ei läsnä; Auto riippumaton; Auto automaattinen; Yhdistetty automaattinen | Yhdistetty automaattinen |
| Ovi B rajakytkimellä | Oven A rajakytkin (ei ole manuaalisissa ja erillisissä ovissa) | ◄► (Valinta) | Ei; Kyllä | Ei |
| Valitse ovi B lattiasta | Oven A kokoonpano jokaiselle kerrokseen: aseta pääsy jokaiseen kerrokseen ja avoin tai sulje ovipysäköinti lattialla (automaattisia ovia varten) | ◄► (Valinta) ▲▼ (Vaihda lattia) | Ei; Pkg. Ovi kiinni; Pkg. Ovi auki | Oven sulkeminen |
| Ovi B Avaa/Sulje aika | Ovi B ilman rajakytkintä: oven avaamis- / sulkemisaika | ▲▼ (lisäys/vähennys) | 1 s <-> 60 s | 10 s |
| Oven B käynnistysviive | Oven B käsikirja: aika ennen käynnistystä | ▲▼ (lisäys/vähennys) | 0,1 s <-> 9,9 s | 2,0 s |
| Liukuovi B | Ovi B rajakytkimellä: aika ennen liukastumisvirhettä | ▲▼ (lisäys/vähennys) | 1 s <-> 60 s | 10 s |
| Ovi B toimiva | Ovi B toimii juoksun aikana. Ei oteta huomioon manuaalisissa tai itsenäisissä ovissa | ◄► (Valinta) | Ei Kyllä Kyllä AT40 | Ei |
| Lisäavaus | Parametri oven edistyneelle avaajalle (avaaminen alkaa ennen hissiauton pysähtymistä). | ◄► (Valinta) | Ei; Kyllä | Ei |
| Valokennon tyyppi | Parametri valokennon tyypin valitsemiseksi: NO valokenno: kosketus avautuu, jos palkki on vapaa. Kosketin sulkeutuu, jos palkki katkeaa. Isku-, valokenno- ja avoimen oven koskettimet on kytkettävä rinnakkain. NC-valokenno: NO-valokennon vastakohta. Isku-, valokenno- ja avoovikoskettimet on kytkettävä sarjaan. HUOMAUTUS: Isku-, valokenno- ja avoimien ovien koskettimien on oltava samanlaisia (NO tai NC) | ◄► (Valinta) | EI; NC | Ei |
| Oven kosketusaika | Odotusaika ennen matkan aloittamista (vanhan oven turvakontaktia varten) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,1 s |
"Signaalit"-valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Signals > |
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Auton prioriteetti | Hissiauton aika lattialla ilman suuntaa ennen laskeutumispuhelujen vastaanomista. Yhdistettyjen automaattisten ovien tapauksessa ajoitus alkaa, kun ovet ovat sulkeutuneet ja iskun, valokennon ja uudelleenavauskoskettimien ei aktivoidu | ▲▼ (lisäys/vähennys) | 2 s <-> 30 s | 10 s |
| Lattiapuhelun rekisteröinti | Aseta lattiapainikkeiden vilkkuminen rekisteröinnin yhteydessä | ◄► (Valinta) | Pysyvä; Lattioiden räystäslistat | Vakituinen |
| AUX-lähtö | Lähtötyypin valinta 16 relelevyllä. HUOMAUTUS: 1 lanka/lattia ja 1 lanka/lattia HYD-kokoonpanot ovat saatavilla vain ensimmäiselle 16RL-levylle. Kun kaksi AUX-levyn kokoonpanoa voidaan asettaa BDU: n (OUT-1 ja OUT-2) lähdöt. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1 lanka lattiaa kohti; Auto lattialla; Lattian valo; Harmaa ilmaisin; 9 segm. indikaattori; Hissi on tulossa; 1 lanka lattiaa kohti HYD | 1 lanka lattiaa kohti |
| BDU-tulot Tyyppi 0 = Auto lattialla ja poissa käytöstä Tyyppi 1 = Nuolet Tyyppi 2 = Auto lattialla ja Auto on tulossa Tyyppi 3 = 3-johdinnäyttö | Tyyppi 0 Tyyppi 1 Tyyppi 2 Tyyppi 3 | Tyyppi 0 | ||
| Automaattinen lattiamerkintä | Sarja-paikannusilmaisimien numeeristen merkkien automaattinen asetus. Arvo kasvaa/laskee automaattisesti jokaisessa kerroksessa alkaen alimmasta kerroksesta | ▲▼ (lisäys/vähennys) | -9 <-> 30 | Alin fl.: 0 |
| Manuaalinen lattiamerkintä | Sarja-paikannusilmaisimien aakkosnumeeristen merkkien manuaalinen asetus. Asetus on tehtävä jokaiselle kerroksesta | ◄► (Valinta) ▲▼ (Muuta arvoa) | - ; 0 <-> 9 ; A <-> Z | |
| Käynnistin PV:ssä | Liipaisin (puhesyntetisaattori / seuraavan suunnan nuolet) on mahdollista käynnistää hidastuspisteessä (Kyllä) tai lattian saapumisessa (Ei). | ◄► (Valinta) | Ei Kyllä | Ei |
| Seuraavan suunnan nuolet | Parametrin aktivoinnin tapauksessa nuolilähdöt aktivoituvat vain, kun nosto pysähtyy lattialle (tai hidastuu, jos PV: n triggerparametri on aktiivinen). | ◄► (Valinta) | Ei Kyllä | Ei |
| LTMP-viive | Tämä toiminto käsittelee viivettä lattia-/hissiautopuhelun ja valon syttymisen välillä. Lähtö poistetaan käytöstä XX sekuntia puhelun jälkeen. 0 sekuntia tarkoittaa, että ajastinta ei ole aktiivinen (valo PÄÄLLÄ) | ▲▼ (lisäys/vähennys) | 0 s <-> 240 s | 1 sekunti. |
| EME-viive | Tämä toiminto käsittelee IEME(Black out signal) -toiminnon ja lähtökomennon (OEME) välisen viiveen ennen järjestelmän vaihtamista automaattisessa hätämenettelyssä. | ▲▼ (lisäys/vähennys) | 0 s <-> 30 s | 0 sekuntia. |
| Summeri klo 81-21 | 81-21-asennukseen: käytä hissiauton päällä olevaa 81-20-luvun akustista summeria (ohitusovi) akustisena hälytyksenä, kun suojaukset eivät ole aktiivisessa asennossa. | ◄► (Valinta) | Ei Kyllä | Ei |
"Erikoisominaisuudet" -valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Special Features > |
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Nollaa sisään | Ajosuunta nollausmenettelyn aikana | ◄► (Valinta) | 2 s <-> 30 s | 10 s |
| Matkustusrajat tarkastuksessa | Koskee vain FAI/FAS-paikannusjärjestelmää. Matkustusrajoitusten asetukset tarkastustilan aikana. Jos matkustaminen on ohjelmoitu rajojen ulkopuolelle, ohjain ei salli liikkumista ylimmän/alimman kerroksen ulkopuolelle. | ◄► (Valinta) | Enintään AGB/AGH; Yli AGB/AGH | Enintään AGB/AGH |
| Palomiehet | (Katso palo-operaation ohjelmointimenettely ) Palomiesten toiminnan tyyppi (jos sellainen on) ja asiaankuuluvat parametrit (palokunnan liityntätaso ja sivu, POM- ja CPOM-avainkontaktityyppi); sovellettavan normin valinta: -) Normi NF P82-207 (Ranska); -) EN 81-72 (a): ei hissiauton FF-avainkytkintä; -) EN 81-72 (b): hissiauton FF-avainkytkimellä; | ◄► (Valitse kenttä) ▲▼ (Muuta arvoa) | Ei paikalla; NF P82-207; EN 81-72 (a); FI 81-72 b) FI 81-73 DM 15/09/2005 (IT) | Ei läsnä |
| Palonhavaitseminen | Lattiapalojen havaitsemisen parametri. Kun tulipalo havaitaan: - jos hissi on eri kerroksessa kuin siinä, jossa tulipalo havaittiin, kaikki tähän kerrokseen kutsutut puhelut peruutetaan; - jos hissi on lattialla, jossa tulipalo havaittiin, ohjain estää oven avaamisen, sulkee ovet (jos se on auki palon havaitsemisen yhteydessä) ja lähettää hissiauton turvalliseen lattiaan | ◄► (Valinta) | Ei; Kyllä | Ei |
| Pysäytä-painikkeen rekisteröinti | Järjestelmä rekisteröi käyttötilan (STOP-painikkeen paine). On myös mahdollista asettaa viive, jotta vältetään samanaikainen liikkuminen generaattorilla varustettuihin laitoksiin. | ◄► (Valinta) | Ei; Kyllä | Ei |
| EN 81-20 | EN 81-20:n mukainen järjestelmäasetus | ◄► (Valinta) | Ei; Kyllä | Ei |
| Häiriönestovirhe | Parametri haitanestovirheen havaitsemiseksi (niiden pysähdysten lukumäärä ilman valokennon aktivointia, minkä jälkeen kaikki hissiautopuhelut peruutetaan) | ◄► (Valinta) ▲▼ (Ei puheluita) | Ei; Kyllä 2 <-> 10 | Ei 3 |
| Palveluskerroksen loppu | Lattia pois käytöstä. Pysäköintilattia, kun HS-tulo on käytössä. | ▲▼ (lisäys/vähennys) | 0 <-> Kerroksen numero: | 0 |
| Automaattinen palautus | Hissihissiauton automaattisen paluun parametrit lattialla: Paluukerros ja Pienin odotusaika ennen automaattista paluuta | ◄► (Valitse parametri) ▲▼ (Muuta arvoa) | Ei 0 <-> Kerroksen numero: 1 min <-> 60 min. | Ei 0 15 min. |
| Palautusalueet | Lisäasetukset palauttamiseksi lattialle suunniteltuina tunteina / päivinä: -) Päivä (0 = joka päivä, 1 = maanantai ... 7 = sunnuntai); -) Valittu aikaväli (4 välipäivää päivässä); -) Paluukerros; -) Aloitusaika; -) Päättymisaika (enimmäisaika: 7 t 45 min); | ◄► (Valitse parametri) ▲▼ (Muuta arvoa) | ||
| R. vyöhykkeen ajoitus | Valittujen palautusalueiden ajoitus | ◄► (Valinta) ▲▼ (Muuta arvoa) | Ei; Kyllä 1 s <-> 120 s | Ei 60 s |
| Soiton poistaminen lattialta | Kaikkien puhelujen poistaminen lattialla, jossa hissiauto pysähtyy, ilman suunnan hallintaa (vain täydet kollektiiviset asennukset) | ◄► (Valinta) | Ei; Kyllä | Ei |
| Ajon hallinta (FR) | Ajon hallinta (Ranska) | ◄► (Valinta) | Ei paikalla; Vetovoimansiirto; Rumpukone | Ei lainkaan |
| Painikkeen koodi | Sen avulla voit ohjelmoida 4-numeroisen koodin hissiautopuheluille. Jokaiselle BCx-hissiauton napin tulolle voidaan antaa nelinumeroinen koodi, joka vastaa hissiauton painikkeiden tuloja. Esimerkki: jos BC0-painike on liitetty 0123-koodiin, voit varata kerroksen 0 Cabinista: a) paina lattiaa 0 3 sekunnin ajan. b) Kaikki COP-painikkeet vilkkuvat c) Paina peräkkäin BC0-, BC1-, BC2- ja BC3-painikkeita vastaavia painikkeita; Huomautus: Syötä koodi väliltä 0-9, joka vastaa BC0 ÷ BC9:n tuloja Ohjelmointikoodi "0 " mahdollistaa erityistoiminnon Pent House | ◄► (Valitse kenttä) ▲▼ (Muuta arvoa) | ||
| Hallitse lämpötilan ympäristö | Tarkista konehuoneen lämpötila anturin kautta (jos sellainen on). Jos lämpötila ylittää asetetut kynnysarvot yli 30 sekunnin ajan, järjestelmä pysähtyy lattialle ja virhe kirjataan. Ohjaus on aktiivinen vain normaalin käytön tai matkustamon prioriteetin aikana. Kun olet asettanut kaksi raja-arvoa, paina Enter voit suorittaa anturin kalibroinnin (paina välittömästi Enter säilyttääksesi nykyisen kalibroinnin, aseta muuten huoneen lämpötila-arvo ja paina sitten Enter). Ensimmäinen kynnys voidaan asettaa välille -10 ° C ja +5 ° C, kun taas toinen kynnys voidaan asettaa välillä +40 ° C - +75 ° C. | ◄► (Valitse kenttä) ▲▼ (Muuta arvoa) | Without; +5°C <=> +40°C | Ilman |
| Automaattinen Puhelut | Kun nosto on normaalitilassa, "Automaattiset puhelut" voidaan aktivoida suorittamaan tietty puhelunumero (enintään 120 puhelua tai rajoittamaton) yhden minuutin vaiheissa. Ovitoiminnot on kuitenkin mahdollista ottaa käyttöön tai olla ottamatta käyttöön (järjestelmä hyväksyy edelleen myös ohjelmoidut puhelut simuloivat lattiapuhelut, jos se on käytössä). Toiminto päättyy automaattisesti, kun koneet sammutetaan tai jos järjestelmä asetetaan tarkastustilaan. | ▲▼ (lisäys/vähennys ◄► (Valitse ovet) | 0 <-> 120 ∞ 10 <-> 60 s Kyllä - Ei | 0 60s Kyllä |
| Seuraa UCM:ää | A3 muutos. Määritä näytön tyyppi. Katso kuvaus UCM-piiristä. | ▲▼ (lisäys/vähennys ◄► (Valinta) | ||
| UCM | Asennustyyppi 81-1 / 81-20 / 81-21 Akselin kulkumenettely ja suojaukset. Katso kuvaus UCM-piiristä. | ▲▼ (lisäys/vähennys ◄► (Valinta) | ||
| Pakotettu pysäytys | Ohjelmoituna asennus pysähtyy tiettyyn kerrokseen jokaisessa risteyksessä (jotkut hotellit käyttävät tätä toimintoa). | ▲▼ (lisäys/vähennys ◄► (Valinta) | ||
| Suojaa lattia | Jos suojattu lattia on ohjelmoitu, kun hissiauto saavuttaa lattian, ovi ei avaudu, vaan näyttö näyttää kamerasta tulevat kuvat, jotka vastaavat kyseistä lattiaa. Ovet voidaan avata vain painamalla OPEN DOOR -painiketta; jos näin ei tapahdu, hissi siirtyy edelliseen kerrokseen ja pysäyttää suojatun lattiatilan (tämä toimintatila on mahdollista vain DMG: n valvontajärjestelmällä). | ▲▼ (lisäys/vähennys ◄► (Valinta) | ||
| Lop-prioriteetti | Otetaan käyttöön ensisijainen kutsutoiminto. pariliitos 16 IN-kortin kanssa (tai BDU:n tärkeimmät tulot) | ◄► (Valinta) | Ei; Kyllä | Ei |
| Ota lattia käyttöön | Puhelun käyttöönottotoiminnon (esim. KORTINlukija) ottaminen käyttöön. Yhdessä 16 IN-kortin kanssa. Tyyppi 1: LOP enable: puhelujen ottamiseksi 16 IN -kortin vastaava tulo on suljettava. Tyyppi 2: COP-ottaminen käyttöön Puhelujen ottaminen käyttöön edellyttää, että 16 IN -kortin vastaava tulo on suljettava Tyyppi 3: Ota COP + LOP käyttöön: puhelujen ottamiseksi käyttöön 16 IN -kortin vastaava tulo on suljettava (lattian poistaminen käytöstä) | ▲▼ (lisäys/vähennys ◄► (Valinta) | Ei Tyyppi 1 Tyyppi 2 Tyyppi 3 | Ei |
| Akselin suojaus | Osastojen ja ovien suojaus. Katso kuvaus kohdasta Akselin suojaus. | ▲▼ (lisäys/vähennys | Ei Tyyppi 1 Tyyppi 2 Tyyppi 3 Tyyppi 4 | Ei |
| Integroitu kuorman punnitus | Ota käyttöön integroidun kuorman punnitsemisen toiminto. Kalibrointimenettely on pakollinen (testi 22) | ◄► (Valitse kenttä) | Ei; Kyllä | Ei |
"Järjestelmän paikannus" -valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Positioning > |
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Paikannusjärjestelmä | Paikannusjärjestelmän tyyppi: Encoderilla tai perinteisellä. Voidaan muokata vain väliaikaisessa käyttötoimintossa. Moodi Huomautus: jos absoluuttinen kooderi ja akselin pituus ovat yli 65 metriä, muuta Kooderin tarkkuutta = 2 automaattisessa nollausvalikossa ennen manuaalisen opetusmenettelyn aloittamista. | ◄► (Valinta) | FAI/FAS; Kooderi myötäpäivään; Kooderi vastapäivään Kooderi ELGO | FAI/FAS |
| Ylin PV | Hidastuvuuden sijainti (kulkuväylä alhaisessa nopeudessa) ja sisäänkäyntien lukumäärä | ▲▼ (lisäys/vähennys) | 2 <-> 6 | 5 |
| Aurinkosähkö kerroksissa | Spesifisen hidastuvuuden sijainti kussakin kerroksessa | ◄► (ylin aurinkosähkö) ▲▼ (Lattian valinta) | Lyhyt kerros tai 2<->6 0 <-> Ei. Lattia | 5 kaikki kerrokset |
| Lyhyen tason viive | Aika ennen lyhyen tason hidastumista (vain jos lyhyt taso on ohjelmoitu) | ▲▼ (lisäys/vähennys) | 0,00 s <-> 2,50 s | 0,00s |
| Suosituin PV 2 -viive | Viive ennen siirtymistä väliopeuteen | ▲▼ (lisäys/vähennys) | 0,00 s <-> 2,50 s | 0,00s |
| Viive Dir.-BRK | VVVF: Viive ajosuunnan aktivoinnin ja ajokomennon (BRK) välillä | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Muut |
| OLEO: Tähti / Delta-viive | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,5 s – VVVF 0,5 s – Tähti/Delta 0,0 s - Muut |
|
| Viive BRK-S | Viive BRK-komennon aktivoinnin ja nopeuskomennon välillä | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,00 s |
| Viive BRK-Dir. | Viive ajo-komennon deaktivoinnin ja kulkusuunnan deaktivoinnin välillä (saapuva al piano) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Muut |
| Tarkastuksen nopeus | Määrittää matkan nopeuden tarkastuksessa | ◄► (Valinta) | Alhainen nopeus; Nopea | Alhainen nopeus |
| Hätätila BRK päällä | Hätäkatkomodulaatioparametri (muokkaa vain, jos EME-levyä ei ole) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 5,0 s | 0,0s |
| Hätä BRK pois päältä | Hätäkatkomodulaatioparametri (muokkaa vain, jos EME-levyä ei ole) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 5,0 s | 0,0s |
Parametritaulukko: (Enkooderin paikannusjärjestelmä):
| Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|
| Paikannusjärjestelmä | Paikannusjärjestelmän tyyppi: Encoderilla tai perinteisellä. Huomautus: Voidaan muokata vain temporary oper -toiminnossa. moodi | ◄► (Valinta) | Encoder myötäpäivään; Encoder vastapäivään Kooderi ELGO | Enkooderi myötäpäivään |
| Automaattinen nollaus | Lattia-asennon itseoppimismenettelyn aloittaminen. Voidaan muokata vain tilapäisen toiminnon tilassa. | ◄► (Valinta) | Ei; Kyllä | Ei |
| Lattian sijainti | Kunkin kerroksen sijaintiarvo | ▲▼ (lisäys/vähennys) ◄► (Valinta) | ||
| Aika | Kiihtyvyyden aika. Aika, joka tarvitaan siirtymiseen käynnistysnopeudesta ajonopeuteen. | ▲▼ (lisäys/vähennys) | 1,0 s <-> 5,0 s | 3,0 s |
| Käynnistyksen aloittaminen | Käynnistysnopeus | ▲▼ (lisäys/vähennys) | 0 s <-> 10 s | 3 % |
| Tehostin pysäyttäminen | Lopullinen (pysäytys) nopeus | ▲▼ (lisäys/vähennys) | 0 s <-> 10 s | 4 % |
| Suurin nopeus | Suurin nopeus matkan aikana | ▲▼ (lisäys/vähennys) | 5 s <-> 100 s | 100 % |
| Tarkastuksen nopeus | Ajonopeus tarkastustilassa | ▲▼ (lisäys/vähennys) | 5 s <-> 100 s | 50 % |
| AGB/AGH nopeus | Matkanopeus AGB/AGH-rajapisteissä. Sama nopeus hätäoperaatioiden aikana | ▲▼ (lisäys/vähennys) | 1 s <-> 15 s | 10 % |
| Viive Dir.-BRK | VVVF: Viive ajosuunnan aktivoinnin ja BRK-komennon välillä (käynnistys) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,5 s - VVVF 0,0 s - Muut |
| OLEO: Tähti / Delta-viive | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,5 s – VVVF 0,5 s – Tähti/Delta 0,0 s - Muut |
|
| Viive BRK-S | Viive BRK-komennon aktivoinnin ja analogisen nopeusrampin alkamisen välillä | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 0,3 s - VVVF 0,0 s - Muut |
| Viive BRK-Dir. | Viive ajo-komennon deaktivoinnin ja kulkusuunnan deaktivoinnin välillä (pysähdy lattialle) | ▲▼ (lisäys/vähennys) | 0,0 s <-> 3,0 s | 1,5 s - VVVF 0,0 s - Muut |
| Hätätila BRK päällä | Hätäkatkon modulaatioparametri | ▲▼ (lisäys/vähennys) | 0,0 s <-> 5,0 s | 0,0s |
| Hätä BRK pois päältä | Hätäkatkon modulaatioparametri | ▲▼ (lisäys/vähennys) | 0,0 s <-> 5,0 s | 0,0s |
| Näytön kooderi | Sisältää tietoja: Enkooderin ominaisuudet, hidastuskorkeuksien (R1D / R1S) lukeminen, uudelleentasaus (RRIPD / RRIPS) ja matkustamon pysäytys (RLD / RLS), jossa D osoittaa alas, kun S tarkoittaa ylöspäin; lopuksi se sisältää tietoa AGB / AGH- ja ZP-korkeuksien lukemisesta. Huomautus: R1D- ja R1S-korkeuksia voidaan muokata painamalla Enter-näppäintä toistamatta itseoppimismenettelyä (jotta hidastuva etäisyys olisi yhtä suuri nousussa ja laskussa). | |||
| Oven alue | Ovialueen ZP pituus millimetreinä |
HUOMAUTUS: Katso tämän käyttöohjeen lopussa olevasta aikakaaviosta, jotta ymmärrät paremmin joitakin parametrien merkityksiä.
"VVVF" -valikko
Tämä valikko on käytettävissä vain, kun FUJI FRENIC LIFT VVVF on liitetty ohjausnostinkorttiin.
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < VVVF > |
| Turska. | Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|---|
| F03 | Enimmäisnopeus | Moottorin suurin nopeus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 150-3600 KIERROSTA/MIN | 1500 RPM |
| F05 | Nimellisjännite | Vaihtosuuntaajan ohjaaman moottorin nimellisjännite | ◄► (Valinta) ▲▼ (Muuta arvoa) | 80-240 V (200V-luokan sarjalle) | 230 V |
| 160-500 V (400V luokan sarjalle) | 380 V | ||||
| F07 | 1. | Kiihdytysramppi (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-99,9 s | 1,8 s |
| F08 | Joulu T2 | Kiihdytysramppi (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-99,9 s | 1,8 s |
| F42 | Ohjaustila | Ohjaustila | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-1-2 | 0 (Vaihteistot, suljettu silmukka) 1 (Vaihteettomat asemat, suljettu silmukka) 2 (Vaihteistot, avoin silmukka) |
| E12 | Acc/dec T5 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 – 99,9 | 1,8 s | |
| C07 | Creep-nopeus | Hiipivä nopeus (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 4,0 Hz (Vaihteistot, avoin silmukka) 2,5 Hz (Vaihteistot, suljettu silmukka) 1,5 Hz (Vaihteettomat asemat, suljettu silmukka) |
|
| C10 | Keskinopeus | Järjestelmän nopeus tarkastustilassa (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 Hz (Vaihdelliset asemat) 10 Hz (Vaihteettomat asemat) |
|
| C11 | Nopea | Suuri nopeus monivaiheiseen nopeuden muutokseen (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 50 Hz (Vaihdelliset asemat) 20 Hz (Vaihteettomat asemat) |
|
| P01 | Moottorin pylväät | Moottorin napojen lukumäärä | ◄► (Valinta) ▲▼ (Muuta arvoa) | Katso moottorilevy | 4 (Vaihdelliset asemat) 20 (Vaihteettomat asemat) |
| P02 | Moottorin nimellinen korkki | Moottorin nimellisteho | ◄► (Valinta) ▲▼ (Muuta arvoa) | Katso moottorilevy | Invertterin koon funktio |
| P03 | Moottorin luokiteltu cur | Moottorin nimellisvirtavoimakkuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | Katso moottorilevy | Invertterin koon funktio |
| P04 | Moottorin automaattinen viritys | Moottorin parametrien automaattinen viritys (vain vaihdetut asemat) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 (2 käynnistää automaattinen viritys vaihdetuille asemille) | |
| P06 | M-No-Load Curr. | Moottorin kuormittavuusvirta | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin automaattisen virityksen setti (Vaihdelliset asemat) 0 A (Vaihteettomat asemat) |
|
| P12 | M-luokiteltu liukumäki | Moottorin nimellinen liukutaajuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-15 Hz | Moottorin automaattisen virityksen setti |
| L01 (*) | PG valitse | Katso VVVF Frenic -hissiasetus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-5 | 0 (Vaihdelliset asemat) 4 (Vaihteettomat asemat, joissa on EnDat Encoder) 5 (Vaihteettomat asemat sin-cos Encoderilla) |
| L02 (*) | PG-tarkkuus | Pulssikooderin resoluutio (pulssi/ käännös) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 360-60000 PUH. | 1024 (Vaihdelliset asemat) 2048 (Vaihteettomat asemat) |
| L19 | S-käyrä 1 | S-käyrä – 1 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L24 | S-käyrä 6 | S-käyrä – 6 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L25 | S-käyrä 7 | S-käyrä – 7 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L26 | S-käyrä 8 | S-käyrä – 8 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L27 | S-käyrä 9 | S-käyrä – 9 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L82 | Jarru viiveellä | BRKS-lähdön aktivoinnin viivästyminen | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10,00 S | 0,20 s |
| L83 | Jarrun pois päältä -viive | BRKS-tuotoksen deaktivoinnin viivästyminen | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10,00 S | 0,10 s |
(*) – Ei saatavilla LM2C Inverters -mallissa.
| Turska. | Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|---|
| F01 | Nopeus-komento | Nopeuden vaihtelun komentojen valinta | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0=MULTISPEED 1=NR Analoginen (ei polarisoitua) ei saatavilla | 0 (FAI/FAS-paikannusjärjestelmällä) 1 (Encoder-paikannusjärjestelmillä) |
| F03 | Enimmäisnopeus | Moottorin suurin nopeus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 150-3600 KIERROSTA/MIN | 1500 RPM |
| F04 | Nimellinen nopeus | Moottorin nimellisnopeus (taajuus) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 50 Hz | |
| F05 | Nimellisjännite | Vaihtosuuntaajan ohjaaman moottorin nimellisjännite | ◄► (Valinta) ▲▼ (Muuta arvoa) | 80-240 V (200V-luokan sarjalle) | 230 V |
| 160-500 V (400V luokan sarjalle) | 380 V | ||||
| F07 | 1. | Kiihdytysramppi (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-99,9 s | 1,8 s |
| F08 | Joulu T2 | Hidastusramppi (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-99,9 s | 1,8 s |
| F09 | TRQ Boost | Vääntömomentin lisäys | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0-5,0 | 0,0 (enintään 7,5 kW ja enintään 30 kW) 0,3 (11 kW - 22 kW) |
| F10 | Sähköinen OL | Ylikuormitus sähköinen suojaus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1 - 2 | 2 |
| F11 | Ylikuormitustaso | Elektroninen moottorin ylikuormitussuoja (ampeerin arvo on yhtä suuri kuin invertterin koko) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1–200 % nimellisvirrasta | 100 % |
| F12 | Ylikuormitusaika | Therminen aikavakio | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,5 – 75,0 min. | 0,5 |
| F20 | DC Jarrun nopeus | Tasavirtaruiskeen tiheyskynnys | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,2 Hz (Avoin silmukka) 0,0 Hz (Suljettu silmukka) |
|
| F21 | DC Jarrun taso | Tasavirtaruiskeen voimakkuuskynnys | ◄► (Valinta) ▲▼ (Muuta arvoa) | 50 % (Avoin silmukka) 0 % (Suljettu silmukka) |
|
| F22 | DC Jarru T | TASAVIRTA-INJEKTIOAIKA | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,0 sivua (Avoin silmukka) 0,0 sivua (Suljettu silmukka) |
|
| F23 | Käynnistysnopeus | Vaihtosuuntaajan käynnistysnopeus (Hz) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-150 | 0,50 Hz (Avoin silmukka) 0,00 Hz (Suljettu silmukka) |
| F24 | Odotusaika | Vaihtosuuntaajan ajoaika käynnistysnopeudella | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10 sekuntia | 0,8 sivua (FAI/FAS) 0,2 s (Enkooderi) |
| F25 | Nopeuden pysäyttäminen | Vaihtosuuntaajan pysäytysnopeus (Hz) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0 Hz (FAI/FAS) 0,1 Hz (enkooderi) |
|
| F26 | Moottorin ääni | Kantoaallon taajuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 15 kHz | |
| F42 | Ohjaustila | Ohjaustila | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-1-2 | 0 (Vaihteistot, suljettu silmukka) 1 (Vaihteettomat asemat, suljettu silmukka) 2 (Vaihteistot, avoin silmukka) |
| F44 | Nykyinen rajoitin | Virranrajoittimen aktivointitaso. % taajuusmuuttajan nimellisvirtaan. Jos "Auto", arvo tarkoittaa, että virranrajoitusta ei ole. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 100% <-> 230% tai Auto | 200 % |
| E04 | Komento X4 | Syöttö X4 ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 | |
| E05 | Komento X5 | Syöttö X5 ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 | |
| E06 | Komento X6 | Input X6 ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 | |
| E07 | Komento X7 | Input X7 ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 | |
| E08 | Komento X8 | Input X8 ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 63 | |
| E10 | Acc/dec T3 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E11 | Acc/dec T4 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E12 | Acc/dec T5 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E13 | Acc/dec T6 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E14 | Acc/dec T7 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E15 | Acc/dec T8 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,8 s | ||
| E16 | Acc/dec T9 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 -99,9 s | 1,8 s | |
| E20 | Signaali Y1 | Lähtö Y1 (transistori) ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 27 | |
| E21 | Signaali Y2 | Lähtö Y2 (transistori) ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 27 | |
| E22 | Signaali Y3 | Lähtö Y3 (transistori) ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 27 | |
| E23 | Signaali Y4 | Lähtö Y4 (transistori) ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 | |
| E30 | Nopeus Arr. Hyst | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,48 Hz (Vaihdemoottori) 0,1 Hz (Vaihteeton moottori) |
|
| E31 | Nopeus Det.Lev | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 48,33 Hz | |
| E32 | Speed Det Hyst | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,48 Hz (Vaihdemoottori) 0,1 Hz (Vaihteeton moottori) |
|
| E39 | RRD-taso | Suositeltu hätäsuunta (Ei käytössä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0% | |
| E61 | Analoginen tulo 12 | Analogisen tulon funktio 12 | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-2 | 1 |
| E98 | Komento FWD | Ruuviliittimen FWD toiminto | ◄► (Valinta) ▲▼ (Muuta arvoa) | 98 | |
| E99 | KOMENTO REV | Ruuviliittimen REV-toiminto | ◄► (Valinta) ▲▼ (Muuta arvoa) | 99 |
| Turska. | Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|---|
| C01 | BATRY TL I | Vääntömomentin rajoitus hätätilanteessa. Jos "OFF", arvo tarkoittaa, että virran rajoitusta ei ole. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0% <-> 100% tai OFF | 0 |
| C02 | BATRY TL T | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0 s | ||
| C03 | Akun nopeus | Nopeus hätäajon aikana | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,50 Hz | |
| C07 | Creep-nopeus | Hiipivä nopeus (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 4,0 Hz (Vaihteistot, avoin silmukka) 2,5 Hz (Vaihteistot, suljettu silmukka) 1,5 Hz (Vaihteettomat asemat, suljettu silmukka) |
|
| C10 | Keskinopeus | Järjestelmän nopeus tarkastustilassa (vain FAI/FAS-paikannusjärjestelmällä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 25 Hz (Vaihdelliset asemat) 10 Hz (Vaihteettomat asemat) |
|
| C11 | Nopea | Suuri nopeus monivaiheiseen nopeuden muutokseen (FAI/FAS-paikannusjärjestelmä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 50 Hz (Vaihdelliset asemat) 20 Hz (Vaihteettomat asemat) |
|
| P01 | Moottorin pylväät | Moottorin napojen lukumäärä | ◄► (Valinta) ▲▼ (Muuta arvoa) | (katso moottorikilpi) | 4 (Vaihdelliset asemat) 20 (Vaihteettomat asemat) |
| P02 | Moottorin nimellinen korkki | Moottorin nimellisteho | ◄► (Valinta) ▲▼ (Muuta arvoa) | (katso moottorikilpi) | Invertterin koon funktio |
| P03 | Moottorin luokiteltu cur | Moottorin nimellisvirtavoimakkuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | (katso moottorikilpi) | Invertterin koon funktio |
| P04 | Moottorin automaattinen viritys | Moottorin parametrien automaattinen viritys (vain vaihdetut asemat) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 (2 käynnistää automaattinen viritys vaihdetuille asemille) | |
| P06 | M-No-Load Curr. | Moottorin kuormittavuusvirta | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin automaattisen virityksen setti (Vaihdelliset asemat) 0 A (Vaihteettomat asemat) |
|
| P07 | M-%R1 | Moottori (%R1) | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin automaattisen virityksen setti (Vaihdelliset asemat) 5 % (Vaihteettomat asemat) |
|
| P08 | M-%X | Moottori (%X) | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin automaattisen virityksen setti (Vaihdelliset asemat) 10 % (Vaihteettomat asemat) |
|
| P09 | M-Slip-ajo | Liu'uta kompensaatiovoitto prosentteina ajopuolen nimelliseen luistuun (P12) | 0,0 - 200% | Moottorin automaattisen virityksen setti | |
| P10 | M-Slip jarrutus | Luiston kompensointivoitto prosentteina jarrutuspuolen nimelliseen luisumaan (P12) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0 - 200% | Moottorin automaattisen virityksen setti |
| P11 | M-Slip T | Liukastumiskompensoinnin aika-arvo (kiinteä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,2 s | |
| P12 | M-luokiteltu liukumäki | Moottorin nimellinen liukutaajuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-15 Hz | Moottorin automaattisen virityksen setti |
| P60 | Ankkurivastus - Rs | ◄► (Valinta) ▲▼ (Muuta arvoa) | Ohm | Moottorin MX*** taulukon mukaan | |
| P62 | Ankkurin q-akselin reaktanssi - Xs | ◄► (Valinta) ▲▼ (Muuta arvoa) | Ohm | Moottorin MX*** taulukon mukaan | |
| P63 | Vaiheiden välinen induktiivinen jännite - E | ◄► (Valinta) ▲▼ (Muuta arvoa) | V | Moottorin MX*** taulukon mukaan | |
| P65 | q-akselin induktanssin magneettisen kyllästymisen korjaus | ◄► (Valinta) ▲▼ (Muuta arvoa) | % | Moottorin MX*** taulukon mukaan | |
| H04 | Palauta ajat automaattisesti | Automaattinen nollaus (aikakertojen määrä) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 10 | |
| H05 | Palauta int automaattisesti | Automaattinen nollaus (palautusväli) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 5 s | |
| H06 | Jäähdytys tuuletin CTRL | Viive jäähdytystuulettimen sammumiselle (Automaattinen arvo tarkoittaa, että tuulettimen ohjausta ei ole rajoitettu; tuuletin on aina päällä). | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 min. <-> 100 min. tai Auto | 5 minuuttia |
| H57 | S-käyrä 11 | Käyrä S-11:een | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 - 50% | 20% |
| H58 | S-käyrä 12 | Käyrä S-12:een | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 - 50% | 20% |
| H64 | Ei pitoaikaa | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0 sivua (FAI/FAS-paikannusjärjestelmällä) 0,8 sivua (Enkooderin paikannusjärjestelmillä) |
||
| H65 | Pehmeä aloitusaika | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,0 sivua (FAI/FAS-paikannusjärjestelmällä) 0,0 sivua (Enkooderin paikannusjärjestelmillä) |
||
| H67 | Lopeta pitoaika | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 sivua (Avoin silmukka) 1,00 sivua (Suljettu silmukka) |
||
| H96 | Jarrumonitori | Ota jarrumonitori käyttöön | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-1 | 0 |
| H190 | Moottorin UVW-järjestys | Sequenza fasi uscita motore | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-1 | 1 |
| Turska. | Parametri | Kuvaus | Navigointi | Arvot | Oletusarvo |
|---|---|---|---|---|---|
| L01 (*) | PG valitse | Katso VVVF Frenic -hissiasetus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-5 | 0 (Vaihdelliset asemat) 4 (Vaihteettomat asemat, joissa on EnDat Encoder) 5 (Vaihteettomat asemat sin-cos Encoderilla) |
| L02 (*) | PG-tarkkuus | Pulssikooderin resoluutio (pulssi/ käännös) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 360-60000 PUH. | 1024 (Vaihdelliset asemat) 2048 (Vaihteettomat asemat) |
| L03 (*) | P.P.Viritys | Katso VVVF Frenic -hissiasetus | ◄► (Valinta) ▲▼ (Muuta arvoa) | ||
| L04 (*) | P.P.Siirtymä | Magneettinen pylvään poikkeama (siirtymäkulma) vaihteille | ◄► (Valinta) ▲▼ (Muuta arvoa) | Asetetaan automaattisesti paalupaikan virityksen aikana (L03) | |
| L05 (*) | ACR P -vahvistus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1,5 | ||
| L07 (*) | Automaattinen napojen virityksen valinta | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin MX*** taulukon mukaan | ||
| L19 | S-käyrä 1 | L19–L28 määrittävät S-käyrävyöhykkeet, joita käytetään monivaiheisten nopeuskomentojen ohjaamiin toimintoihin, joissa on S-käyrän kiihtyvyys/hidastuvuus. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|
| L20 | S-käyrä2 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L21 | S-käyrä 3 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L22 | S-käyrä 4 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L23 | S-käyrä 5 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L24 | S-käyrä 6 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L25 | S-käyrä 7 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L26 | S-käyrä 8 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L27 | S-käyrä 9 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L28 | S-käyrä 10 | 20 % (Vaihdelliset asemat) 25 % (Vaihteettomat asemat) |
|||
| L29 | SFO Pidä T | Lyhyt lattiakäyttö (pitoaika) Käytetään vain FAI-FAS-paikannustilassa. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00s. <-> 10,00s. tai OFF | POIS |
| L30 | SFO-nopeus | Lyhyt lattiakäyttö (sallittu nopeus) – EI KÄYTÖSSÄ | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 s | |
| L36 (*) | ASR P -vahvistus korkea | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 10,00 (Vaihdelliset asemat) 2,50 (Vaihteettomat asemat) |
|
| L37 (*) | ASR I Saa korkean | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,100 | |
| L38 (*) | ASR P -vahvistus matala | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 10,00 (Vaihdelliset asemat) 2,50 (Vaihteettomat asemat) |
|
| L39 (*) | ASR I Saan matalan | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,100 | |
| L40 (*) | Kytkimen nopeus 1 | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 5,00 (Vaihdelliset asemat) 1,00 (Vaihteettomat asemat) |
|
| L41 (*) | Kytkimen nopeus 2 | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | 10,00 (Vaihdelliset asemat) 2,00 (Vaihteettomat asemat) |
|
| L42 (*) | ASR-FF-voitto | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0.000 – 10.000 s | 0.000 s | |
| L55 (*) | TT:n alkamisaika | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 – 1,00 | 0.20 s | |
| L56 (*) | TB Päättymisaika | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00 – 20,00 | 0.20 s | |
| L64 (*) | TB Digitaalinen 3 | ◄► (Valinta) ▲▼ (Muuta arvoa) | -200 - +200 % | 0 % | |
| L65 (*) | ULC-toiminta | Epätasapainoinen kuormituksen korjaus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0-1 | 1 |
| L66 (*) | ULC-aktivointi | Epätasapainoinen kuormituksen kompensointi (aktivointiaika) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,01-2 sekuntia | 2,00 s |
| L68 (*) | ULC ASR P -vahvistus | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 10 (FAI/FAS) 10 (Enkooderi) |
|
| L69 (*) | ULC ASR I -voitto | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,01 (FAI/FAS) 0,01 (Enkooderi) |
|
| L73 (*) | APR P -vahvistus nolla | Katso Palautusohjaus ja ajomukavuus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 (FAI/FAS) 0 (Enkooderi) |
|
| L74 (*) | APR D Vahvistus | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0.0 | ||
| L75 (*) | Suodattimen aika | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0.000 s | ||
| L76 (*) | ACR P -vakio | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0.00 | ||
| L80 | Jarrutustila | Jarrunohjauksen (BRKS) lähtötila | ◄► (Valinta) ▲▼ (Muuta arvoa) | 1-2 | 1 |
| L81 | Jarru on taso | Lähtövirta, joka kytkee BRKS-signaalin päälle, kun L80 = 2. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,-200% moottorin kuormittamisesta | 100 % |
| L82 | Jarru viiveellä | BRKS-lähdön aktivoinnin viivästyminen | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10,00 sekuntia | 0,20 s |
| L83 | Jarrun pois päältä -viive | BRKS-tuotoksen deaktivoinnin viivästyminen | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-100 sekuntia | 0,10 s |
| L84 | BRKS-tarkistus t | BRKS-lähdön ja BRKE-syötteen välinen sallittu aika (Er6) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10 sekuntia | 0,00 s |
| L99 | TOIMI SEL | Ei käytössä | ◄► (Valinta) ▲▼ (Muuta arvoa) | ||
| L122 | Del. Op. tuloteho Det. taso | ◄► (Valinta) ▲▼ (Muuta arvoa) | % | ||
| L124 | Del. Op. Dir. Calc. Viive ajastin | ◄► (Valinta) ▲▼ (Muuta arvoa) | s. | ||
| L130 | kiekon halkaisija (Ds) | ◄► (Valinta) ▲▼ (Muuta arvoa) | mm | Moottorin MX*** taulukon mukaan | |
| L131 | Kooderin halkaisija (Ds) | ◄► (Valinta) ▲▼ (Muuta arvoa) | mm | Moottorin MX*** taulukon mukaan | |
| L132 | Theta-korvausalue | ◄► (Valinta) ▲▼ (Muuta arvoa) | deg | Moottorin MX*** taulukon mukaan | |
| L133 | Theta-kompensoinnin vahvistuksen alempi rajoitin | ◄► (Valinta) ▲▼ (Muuta arvoa) | Moottorin MX*** taulukon mukaan | ||
| L134 | Vastaiskun aika | Vastaiskun aika (Kun L65 = 2) | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0,00-10,00 s | 0 |
| L198 | Op. aseta kytkin 1 | BIT0 = Kantoaallon taajuus on mahdollista kiinnittää 16 kHz: iin koko nopeusalueella ajomelun vähentämiseksi. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 | |
| L199 | Op. set kytkin 2 | Varattu. | ◄► (Valinta) ▲▼ (Muuta arvoa) | 0 |
(*) – Ei saatavilla LM2C Inverters -mallissa.
HUOMAUTUS: Tutustu aikakaavioon ymmärtääksesi paremmin joitain merkitysparametreja.
"Rec Parametrit" -valikko
Huomautus: tietojen tallentamista ei tarvita vain PBV3-ohjainten emulointiin.
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Rec Parameters > |
| Kerros 0 12:30:56 < Rec Parameters > | ENTER----- ----> | Kerros 0 12:30:56 < Rec Parameters > Tallenna parametrit | ----- ENTER ----> <----- ESC ------ | Kerros 0 12:30:56 < Rec Parameters > Tallenna parametrit Oletko varma? |
| ▲ ▼ | ASTUA ↓ |
|||
| Kerros 0 12:30:56 < Rec Parameters > Tallenna parametrit Lopeta reg. |
||||
| Kerros 0Lattia 0 12:30:56 < Rec Parameters > Palauta parametrit | ----- ENTER ----> <----- ESC ------ | Kerros 0Lattia 0 12:30:56 < Rec Parameters > Palauta parametrit Oletko varma? |
||
| ASTUA ↓ |
||||
| Kerros 0Lattia 0 12:30:56 < Rec Parameters > Palauta parametrit Lopeta reg. |
||||
"Kello" -valikko
| ----->>>>> | | ----->>>>> | Kerros 0 - 12:30:56 < Clock > |
- Da = Päivä
- Mo = Kuukausi
- Yr = Vuosi
- D = Arkipäivä (1=ma)
- Hr = Tunnit
- Mn = Minuutit

VAROITUS: Jos järjestelmä sammuu, aika tallennetaan Super-kondensaattorilla (enintään 5 päivän ajan ilman virtalähdettä).
VVVF Frenic Hissin asetus
– Viritysmenettely –
Valitse "Asennusvalikko"

Näytössä näkyy:

Vahvista painamalla OK ja valitse "Koneen / VVVF:n automaattinen viritys:
Aseta pyydetty parametri ja siirry seuraavaan painamalla oikeaa nuolta.
VVVF-parametrin luettelo on:
| Parametri | Kuvaus | Vaihdeton moottori | Vaihdettu moottori |
|---|---|---|---|
| P01 - Moottoripylväät | Aseta moottoripylvään numero | X | X |
| F03 – Suurin nopeus | Aseta moottorin suurin nopeus [RPM] (moottorilevy) | X | X |
| F04 – Nimellisvirta | Aseta moottorin nimellisnopeus [Hz] (Moottorilevy) | X | X |
| F05 – Nimellisjännite | Aseta moottorin nimellisjännite [V] (Moottorilevy) | X | X |
| P08 – M-%X | Lisää arvo 10 % | X | |
| P07 – M-%R1 | Lisää arvo 5 % | X | |
| P06 – M-No Load Curr. | Lisää arvo 0 [A] | X | |
| P03 – Moottorin nimellisvirta | Lisää nimellisvirta [A] (Moottorilevy) | X | |
| P02 – Moottorin nimelliskorkki | Aseta nimellisteho [kW] (Moottorilevy) | X | |
| C11 – Suuri nopeus | Aseta suuri nopeus [Hz] (Moottorilevy) | X | |
| C10 – Keskinopeus | Aseta keskinopeus [Hz] (Tarkastusnopeus) | X | |
| C07 – Creep-nopeus | Aseta pieni nopeus [Hz] (10 % C11:stä) | X | |
| L01 – PG-valinta | Aseta moottorin enkooderin tyyppi: (VVVF valinnaiset levyt) | X | X (*) |
| L02 – PG-resoluutio | Aseta moottorin enkooderin tarkkuus | X | X (*) |
(*) Vain suljettu silmukka
Viimeinen parametri on erilainen moottorityypin mukaan:
VAIHDETON moottori:
 Valitse 4 : Staattinen viritys
Valitse 4 : Staattinen viritysValitse 5 : Dynaaminen viritys (vain, jos ei ole köysiä)
VAIHDETTU moottori:
 Valitse 3
Valitse 3Jos ilmenee ongelmia, siirry Vika-valikkoon ongelman tunnistamiseksi (§ Moottorin viritysvirheet)
Paina toimenpiteen lopussa ylös/alas-painiketta ja tarkista oikea hissiauton liikesuunta; jos ne eivät pidä paikkaansa, parametrien E98 ja E99 käänteiset arvot.
For closed loop installations, in the <I/O Status>, VVVF IN/OUT menu, check that the VVVF motor encoder value (4/7) is positive (+) during upward movement and negative (-) during downward movement when the FWD (1/7) command is activated. If not, invert a channel in the motor encoder of the VVVF.
| L01 | Kooderin tekniset tiedot | Enkooderikortti | Moottori | |
| A/B-lähtökanava | Absoluuttinen signaali | |||
| 0 | Avaa keräin / Push-Pull | = | OPC-PG3 | IM |
| Linjaohjain | = | OPC-PMPG | ||
| 1 | Avaa keräin / Push-Pull | Z | OPC-PG3 | PIKAVIESTIT JA PMSM |
| 4 | Sini-ero (1Vpp) | EnDat2.1 (ECN1313) | OPC-PS tai OPC-PSH | PMSM |
| 5 | Sini-ero (1Vpp) | ERN1387 | OPC-LM1-PR | PMSM |
| 6 | Sini-ero (1Vpp) | BISS-C (Sendix 5873) | OPC-PS tai OPC-PSH | PMSM |
| 7 | Sini-ero (1Vpp) | SSI (ECN1313) | OPC-PS tai OPC-PSH | PMSM |
| 8 | Sini-ero (1Vpp) | Hiperface (SRS50) | OPC-PSH | PMSM |
| Koodi | Kuvaus | |
|---|---|---|
| OC1 | Ylivirta kiihtyvyyden aikana | Vaihtosuuntaajan hetkellinen lähtövirta ylitti ylivirtatasolla. |
| OC2 | Ylivirta hidastumisen aikana | |
| OC3 | Ylivirta tasaisella nopeudella ajamisen aikana | |
| EF | Maavirhe | Nollavaihevirta, joka johtuu lähtöpisteen maaviasta on ylittänyt sallitun rajan. (30 kW tai uudempi) |
| OV1 | Ylijännite kiihtyvyyden aikana | Tasavirtaväylän jännite ylitti ylijännitteen havaitsemisen taso. |
| OV2 | Ylijännite hidastumisen aikana | |
| OV3 | Ylijännite juoksun aikana tasaisella nopeudella | |
| LV | Alijännite | Tasavirtaväylän jännite putosi alivoltin tunnistustason alapuolelle. ikä |
| Lin * | Syöttövaiheen menetys | Syöttövaiheen menetys tai Interphase-jännite epätasapaino oli suuri. |
| OH1 | Jäähdytyselementin ylikuumeneminen | Lämpönielun lämpötila on noussut epänormaalisti. |
| OH2 | Ulkoinen hälytys | Ulkoinen hälytys THR syötettiin. (kun THR "Ota ulkoinen hälytysmatka käyttöön" on mille tahansa digitaaliselle tulopäätteen) |
| OH3 | Invertterin sisäinen ylikuumeneminen | Vaihtosuuntaajan sisälämpötila on ylittänyt sallittu raja. |
| OH4 | Moottorin suojaus (PTC/NTC-välittäjä) | Moottorin lämpötila on noussut epänormaalisti. |
| DBH | Jarrurekisterin ylikuumeneminen | Jarruvastuksen lämpötila on ylittänyt sallitun rajan. |
| OL1 | Moottorin ylikuormitus 1 | Elektroninen lämpösuojaus moottorin ylikuormituksen havaitsemiseen aktivoitu. |
| OLU | Invertterin ylikuormitus | Lämpötila IGBT: n sisällä on noussut epänormaalisti. |
| OS | Ylinopeuden ehkäisy | Moottorin nopeus on suurempi kuin suurin nopeus * L32. |
| PG | Rikki johdotus PG: ssä | Moottorin nopeus on suurempi kuin suurin nopeus * L32. |
| nrb | NTC-langan katkeajavirhe | Havaitsi langanmurtuman NTC-välittäjän tunnistuspiirissä. |
| Er1 | Muistivirhe | Virhe kirjoitettaessa tietoja invertterille muisti. |
| Er2 | Näppäimistön tietoliikennevirhe | Avaimen ja invertterin välillä on tapahtunut tietoliikennevirhe. tyyny |
| Er3 | Suorittimen virhe | Suoritinvirhe tai LSI-virhe. |
| Er4 | Option tietoliikennevirhe | Yhdistetyn yhteyden välillä on tapahtunut tietoliikennevirhe vaihtoehtokorttiin ja vaihtosuuntaajaan. |
| Er5 | Vaihtoehdon virhe | Yhdistetty vaihtoehtokortti havaitsi virheen (ei vaihtosuuntaaja). |
| Er6 | Käytön suojaus | Yritettiin suorittaa väärin. |
| Er7 | Viritysvirhe | Automaattinen viritys tai magneettisen pylvään asennon siirtymän viritys epäonnistui, epänormaalit viritystulokset. |
| Er8 | RS-485-tietoliikennevirhe (portti 1) | RS-485:n aikana on tapahtunut tietoliikennevirhe viestintä. |
| Erp | RS-485-tietoliikennevirhe (portti 2) | |
| OPL | Tulostusvaiheen menetys | Tulostusvaiheen menetys. |
| Ennen | Nopeuden yhteensopimattomuuteen | Vertailunopeus ja tunnistusnopeus ovat erilaiset. |
| Erf | Tietojen tallennusvirhe alijännitettämisen aikana | Kun alijännitesuojaus aktivoitiin, vaihtosuuntaaja tietojen tallentaminen epäonnistui, mikä osoitti tämän virheen. |
| ErH | Laitteistovirhe | Virtapainetun piirilevyn LSI:ssä on toimintahäiriö melun vuoksi jne. |
| Ert | CAN avaa tietoliikennevirhe | CANopen-tietoliikenteen aikana on tapahtunut tietoliikennevirhe. |
| ECF | EN1, EN2-liittimien piirivirhe | EN1- EN2-päätepiirissä diagnosoitiin poikkeavuus. |
| Ot | Ylivääntömomenttivirta | Vertailumomenttivirta muuttui liialliseksi. |
| DBA | Jarruttava transistor rikki | Jarrutransistorin poikkeavuuden havaitseminen |
| bbE | Jarrun vahvistus | Vaihtosuuntaaja havaitsee ristiriidan jarrun ohjaussignaalin ja jarruntunnistussignaalin (takaisinpalautuksen) välillä. |
| Eo | EN1, EN2-päätelaitteet keskustelevat | Enoff-lähdön ja EN1/EN2-liittimien välillä havaittu törmäys. tulo |
| ECL | Mukautettava logiikkavirhe | Mukautettava logiikan määritysvirhe on aiheuttanut hälytyksen. |
| OH6 | Latausvastus ylikuumenee | Latausvastuksen lämpötila on ylittänyt sallitun rajan. invertteri |
| rbA | Pelastaminen jarruhälyttimellä | Jarrun ohjauksella ei havaittu liikettä pelastusoperaation aikana. |
| Tca | Matkan enimmäismäärien saavuttaminen laskuri | Matkan suunnan muutosten määrä on saavuttanut esiasetetun tason. |
| SCA | Oikosulun hallintavirhe | Vaihtosuuntaaja havaitsee ristiriidan oikosulun välillä ohjaussignaalin ja oikosulun tunnistussignaalin (takaisinkytkentä) signaalin. |
| LCO | Kuormituskennon ylikuormitus | Kuormituskennotoiminto on havainnut ylikuormitustilanteen esiasetetun tason tasolla. |
| Koodi | Hälytyksen nimi | Alikoodi | Kuvaus |
|---|---|---|---|
| OC1 | Ylivirta kiihtyvyyden aikana | 1 | Ylivirtasuojaus (MMA-keskeytys) - Normaali ylivirta |
| 2 | Ylivirtasuojaus (OCL-keskeytys) - Normaali ylivirta | ||
| OC2 | Ylivirta hidastumisen aikana | 3 | Oikosulkusuojaus - Ylivirta alussa |
| 4 | Maavajasuojaus - Ylivirta alussa | ||
| OC3 | Ylivirta vakionopeuden aikana | 5 | Tunnistussignaalin vika (VIKAsignaali) - Porttipiiri |
| 11 | Tunnistussignaalin vika (OCT-signaali) - Tunnistuspiiri (PPCB) | ||
| 12 | Tunnistussignaalin vika (OCL-signaali) - Tunnistuspiiri (PPCB) | ||
| OV1 | Ylijännite kiihtyvyyden aikana | 1 11 | Ylijännitesuojaus (OVT-signaali) Tunnistussignaalin vika (OVT-signaali) |
| OV2 | Ylijännite hidastumisen aikana | ||
| OV3 | Ylijännite vakionopeuden aikana | ||
| Lin | Syöttövaiheen menetys | 1 | Tasasuuntaajan diodisuojaustason tunnistus |
| 2 | Jatkuvan toiminnan toleranssitason tunnistus | ||
| OPL | Tulostusvaiheen menetys | 1 | |
| OH1 | Jäähdytysevän ylikuumeneminen | 1 | Jäähdytyseväen ylikuumeneminen (NTC2) |
| 3 | Muuntimen ylikuumeneminen (NTC4) | ||
| 11 | Thermistorin irrotus (NTC2) | ||
| OH2 | Ulkoinen vika | 0 | Suojaus THR:n kautta |
| OH3 | Ylikuumeneminen invertterin sisällä | 0 | Sisäinen ilman ylikuumeneminen (NTC1) |
| OH4 | Moottorin suojaus (PTC-välittäjä) | 1 | PTC-thermistori |
| 2 | NTS-thermistor | ||
| OH6 | Latausvastus ylikuumenee | 1 | Latausvastus ylikuumenee Lukuun ottamatta FRN0039LM2A-4 / FRN0045LM2A-4 |
| 11 | Thermistorin irrotus (NTC3) | ||
| OL1 | Moottorin ylikuormitus | 0 | Virrantunnistus elektroninen lämpö |
| LV | Alijännite | 1 | Alijännite tapahtuu portin ON aikana |
| 11 | Akun vähimmäiskäyttöaste | ||
| dbH | DB-vastin ylikuumeneminen | 0 | DB-vastin ylikuumeneminen (F50 <-> F52) |
| 1 | DB-transistor 2sec_ON jatkuvasti (Väärät ovat liian korkeat) | ||
| DBA | DB-transistorivirheen havaitseminen | 0 | DB-transistorivirheen havaitseminen |
| Er1 | Muistivirhe | 0x0001 | Hälytyshistorian tuhoaminen |
| 0x0002 | Vakiofunktion koodi | ||
| 0x0004 | Käyttäjän funktion koodi | ||
| 0x0008 | Piilotettu funktiokoodi | ||
| 0x0010 | Ohjelma-alueen virhe | ||
| 0x0040 | Lukuristiriita (yritä uudelleen) | ||
| 0x0080 | Kirjoitusristiriita (yritä uudelleen) | ||
| 0x0100 | Laajennettu alue | ||
| 0x1000 | Säädön arvoalue | ||
| Er2 | Näppäimistöpaneelin tietoliikennevirhe | 1 | Yhteyden katkaisun tunnistus |
| Er3 | Suorittimen virhe | 1 | Suorittimen käsittely käynnistyy uudelleen |
| 1000 | Funktiokoodin tarkistussummavirhe (RAM-virhe) | ||
| 0x0001 | Vakiofunktion koodivirhe | ||
| 0x0002 | Piilotettu funktiokoodi (u koodi) -virhe | ||
| 0x0004 | Piilotettu funktiokoodi (n koodi) -virhe | ||
| 0x0008 | Säätöventtiilin toimintokoodivirhe | ||
| 0x0010 | Laajennettu alue | ||
| 2000 | Kiinteän syklin virhe | ||
| 0x0001 | L1-syklin virhe | ||
| 0x0004 | L3-syklin virhe | ||
| 0x0008 | L4-syklin virhe | ||
| 0x0020 | L6-syklin virhe | ||
| 0x0080 | LP-syklin virhe | ||
| 3000 | Epäoikeudenmukainen leikkaus | ||
| 5001 | RST-syötteen ulkopuolella | ||
| 7001 | Pinoalueen tuhoaminen | ||
| 9000 | Ohjelmistovirheiden havaitseminen | ||
| 0x0200 | Hälytys QUE yli | ||
| Er4 | Option tietoliikennevirhe | 1 | Portti Tietoliikennevirhe Vaihtoehtoa ei ole |
| 3 | Portin C tietoliikennevirhe | ||
| 10 | Asennuksen ylimäärä Vaihtoehtoa ei ole |
||
| Er5 | Vaihtoehdon virhe | 0 | Vaihtoehto vastaavuuden aikana |
| 1 | Valmistumissignaali PÄÄLLÄ (Vaihtoehtoa ei ole) | ||
| 10 | AIO PT EEPROM -virhe (Vaihtoehtoa ei ole) | ||
| 26 | PR-PP-sijaintitietojen virhe (vain OPC-PMPG+L01=2) | ||
| 27 | PP-toimen tietojen aloitusvirhe | ||
| 50 | Ei tallennusaluetta | ||
| 51 | Tietoliikennekomentovirhe | ||
| 52 | Erottelukoodin virhe | ||
| 53 | Tarkistussummavirhe | ||
| 54 | Kirjoitusvirhe | ||
| Er6 | Toimintosarjan virhe | 2 | Aloita tarkistus |
| 7 | Moninopeuksinen määritetty virhe | ||
| 8 | Jarrun tarkistus (odotusajan aikakatkaisu) | ||
| 9 | |||
| 10 | Ei kokeile magneettista napa-asennon viritystä | ||
| 11 | Tulostuspuolen kontaktorin vahvistusvirhe | ||
| 12 | Luokitusnopeuden puute | ||
| 14 | Jarrun kaao (määritetty virhe) | ||
| 15 | Oikosulku (SCC:lle määritetty virhe) | ||
| 16 | Pelastusvirhe |
| Koodi | Hälytyksen nimi | Alikoodi | Kuvaus |
|---|---|---|---|
| Er7 | Induktiomoottorin virityksellä | 1 | Moninopeuksinen määritetty virhe |
| 2 | R1-vaiheen virhe | ||
| 3 | %X -virhe | ||
| 6 | Tulostus nykyinen virhe | ||
| 7 | Aseman komento POIS PÄÄLTÄ | ||
| 9 | BX-pääte ON | ||
| 11 | Alijännite (LV) -tunnistus | ||
| 15 | Hälytys tapahtuu | ||
| 16 | Aseman muutoskomento | ||
| 19 | Toiset | ||
| 21 | I0 -virhe | ||
| 24 | EN-pääte | ||
| 25 | DRS-pääte | ||
| Er7 | Nykyisellä tunnistuksella hanki viritys | 32 | EEPROM-kirjoitusvirhe |
| 37 | STOP key_ON | ||
| Er7 | Magneettisella napa-asennosta offset-viritys | 51 | Viritys ilman moottoria |
| 52 | Magneettisen napa-asennon viritystulosvirhe | ||
| 53 | F42-asetus ei osu | ||
| 54 | L04-ristiriita | ||
| Er7 | Nykyisellä tunnistuksen siirtymäviritys | 61 | EEPROM-kirjoitusvirhe |
| 62 | STOP key_ON | ||
| Er7 | Synkronisen moottorin viritysvirhe | 5058 | Amature-vastusvirhe (alaraja) |
| 5059 | Amature-vastusvirhe (yläraja) | ||
| 5060 | Ld-virhe (alaraja) | ||
| 5061 | Ld-virhe (yläraja) | ||
| 5062 | Pq-virhe (alaraja) | ||
| 5063 | Pq-virhe (yläraja) | ||
| 5080 | ACR-vahvistusvirhe (yläraja) | ||
| 5081 | ACR-vahvistusvirhe (alaraja) | ||
| Er8 | RS485-tiedonsiirtovirhe | 0 | CH1 RS485 -tiedonsiirtovirhe |
| nrb | NTC-välittäjän irrotuksen tunnistus | 0 | NTC-välittäjän irrotuksen tunnistus |
| OS | Ylinopeus | 0 | Ylisytetty suojaus |
| Pg | PG-virhe | 1 | Laitteiston suorittama yhteyden katkaisun havaitseminen |
| 2 | Z-vaiheen katkaisun havaitseminen ohjelmistolla | ||
| 50 | Vaihtoehto – A/B-vaiheen (synnin) irrotuksen tunnistus | ||
| 51 | Vaihtoehto – C/D-vaiheen (Sin) irrotuksen tunnistus | ||
| 52 | Vaihtoehto – R-vaiheen (Sin) irrotuksen tunnistus | ||
| 53 | Vaihtoehto – A/B-vaiheen (pulssin) irrotuksen tunnistus | ||
| 54 | Vaihtoehto – Z-vaiheen (pulssin) irrotuksen tunnistus | ||
| 55 | Vaihtoehto – U/V/W-vaiheen (pulssin) irrotuksen tunnistus | ||
| 60 | Vaihtoehto - watchdog aikakatkos | ||
| 61 | Vaihtoehto – sarjakooderin vasteen aikakatkos | ||
| 62 | Vaihtoehto - CPU communiction CRC -virhe | ||
| 63 | Vaihtoehto – Cpu ulos kommunikaatiovirhe | ||
| 70 | Vaihtoehto - ABZ-tulostusvirhe | ||
| 71 | Vaihtoehto - sarjakooderi jokainen hälytys | ||
| 72 | Vaihtoehto - muistin käyttövirhe | ||
| 73 | Vaihtoehto – kulkuraatiovirhe | ||
| 80 | Vaihtoehto – PG-kortin asetusvirhe | ||
| Ennen | Nopeuden ristiriita (nopeuspoikkeaman ylimäärä) | 1 | Nopeuden hallinnan ja nopeudentunnistuksen merkit eroavat toisistaan |
| 3 | Nopeuspoikkeamat (nopeuden tunnistus > nopeuskomento) | ||
| 5 | Nopeuden tunnistus on edelleen 0 | ||
| 7 | Nopeuspoikkeamat (nopeuden tunnistus < speed command) | ||
| Erf | Alijännitetietojen tallennusvirhe | 0 | Alijännitetietojen tallennusvirhe |
| Erp | RS485 2 t tietoliikennevirhe | 0 | CH2 RS485 -tiedonsiirtovirhe |
| Ert | CAN-tietoliikennevirhe | 1 | Bussin lähtö |
| 2 | Aikakatkaisun tunnistuksen vartiointi | ||
| OLU | Invertterin ylikuormitus | 1 | IGBT-suojaus |
| 2 | Invertterin lämpö Vain FRN0060LM2A-4 <-> FRN0091LM2A-4 |
||
| 10 | ΔTj-c ≥ 60 °C | ||
| ECF | EN-piirivirhe | 10 | EN-syöttövirhe (_EN1A=L, EN2A=L) |
| 11 | EN-syöttövirhe (_EN1A=H, EN2A=H) | ||
| 5000 | Diagnoosipiirin virhe | ||
| 5010 | P5S-virransyötön vika | ||
| 5020 | Suorittimen diagnoosi: Portin asetusdiagnoosi | ||
| 5030 | Suorittimen diagnoosi: ROM-diagnoosi | ||
| 5040 | Suorittimen diagnoosi: RAM-diagnoosi | ||
| 5050 | Suorittimen diagnoosi: sekvenssimonitori | ||
| ECL | Mukautuslogiikan toimintahäiriö | 0 | Mukautuslogiikkavirhe |
| Erehtyä | Simuloitu virhe | 9998 | Simuloitu virhe |
| Ot | Vääntömomentin liiallinen virhe | 0 | Vääntömomentin liiallinen virhe |
| bbE | Mekaaninen jarruvirhe | 11 | BRAKE 1 -virhe |
| 12 | BRAKE 2 -virhe | ||
| Eo | EN-päätevirhe | 0 | EN-päätevirhe |
| rbA | Pelastusnopeuden tunnistusvirhe | 0 | Pelastusnopeuden tunnistusvirhe |
| Tca | Suuntakytkimen raja-arvon saapuminen | 0 | Suuntakytkimen raja-arvon saapuminen |
| SCA | Oikosulkuvirhe | 0 | Oikosulkuvirhe |
| Lco | Lataa soluvirhe | 0 | Lataa soluvirhe |
| EF | Maasuojaus | 0 | Kolmivaiheinen virta Vain FRN0060LM2A-4 <-> FRN0091LM2A-4 |
Vanhoissa moottoreissa automaattinen viritys voi epäonnistua: näissä tapauksissa automaattinen viritys tyyppi 1 (kohdassa 10, valitse P04 = 1), mutta tässä tapauksessa arvot P06 ja P12 on syötettävä manuaalisesti.

Tyypilliset P06-arvot ovat 30–70 % P03:sta.
 F.r. = Taajuusluokiteltu
F.r. = TaajuusluokiteltuS.s. = Nopeus synkroninen
S.r. = Nopeusluokiteltu
P12:n hyväksyttävät arvot ovat välillä 0,5–5 Hz.
Esimerkiksi 4-napaisessa moottorissa nimellistaajuus on 50 Hz, synkroninen nopeus on 1500 rpm ja nimellisnopeus on moottorin tyyppikilvessä (aina kierrosta minuutissa).
VAIHDETON moottori
Jos ongelma ilmenee, valikkovirheissä näkyy virhe 52 = er7 Error VVVF. Tarkista tässä tapauksessa moottorin kooderin liitännät, tyhjennä virheet "Virheet" -valikosta ja toista poletunointi 14 kohdasta.
Poletunointimenettelyn jälkeen yritä siirtää hissiä huollossa ylös ja alas joidenkin moottoripyörysten ajan. Jos menettely liikkuu oikein, toimenpide on ohi, muuten VVVF: n (ere tai Ocx tai Os) virheen sattuessa käännä kaksi moottorin vaihetta muuttamalla VVVF: n H190-parametria, tyhjennä "Vika" -valikon virheet ja toista poletunointimenettely.
Ohjelmistopäivityksen ohjeet
Tiedostonimi.PP2 tai .PP4
Aseta USB-laite korttipaikkaan odottamaan viestiä kuvan 1 tapaan.
 (Kuva 1)
(Kuva 1)Valitse "Aseta tiedosto PlayPadiin" (oletus), paina OK-painiketta. Ikkuna muuttuu kuvaksi 2.
 (Kuva 2)
(Kuva 2)Seuraa näytön ohjeita ja valitse .PP2/4-tiedosto (esimerkissä PLP2_2.PP2) ja paina OK. Ikkuna muuttuu kuvaksi 3
 (Kuva 3)
(Kuva 3)Vahvista päivitysprosessi painamalla OK. Ikkunan muutokset kuvaksi 4
 (Kuva 4)
(Kuva 4)Menettelyn lopussa usb on poistettava (kuva 5 tai kuva 6 tulee näkyviin).
 (Kuva 5)
(Kuva 5) (Kuva 6)
(Kuva 6) (Kuva 7)
(Kuva 7)Ikkuna muuttuu kuvaksi 8.
 (Kuva 8)
(Kuva 8)Noudata näyttöön tulevia ohjeita ja valitse *.bin tiedosto ja paina OK. Ikkunan muutokset kuvaan 9.
 (Kuva 9)
(Kuva 9)Vahvista päivitysprosessi painamalla OK. Ikkuna muuttuu kuvaksi 10, odota hetki.
 (Kuva 10)
(Kuva 10)Valitse laite (tai laiteryhmä) päivittääksesi ja paina OK (kuva 11)
 (Kuva 11)
(Kuva 11)Ikkuna muuttuu kuvaksi 12: odota, kunnes prosessi on valmis. Jos sinun on painettava mitä tahansa nuolipainiketta taustavalon kytkemiseksi päälle.
 (Kuva 12)
(Kuva 12)Kun prosessi päättyy (kuva 13), paina Esc-painiketta, kunnes ikkunoissa on "Poista USB-laite" (kuva 14).
 (Kuva 13)
(Kuva 13) (Kuva 14)
(Kuva 14)| Laite | SW:n päivittämiseen tarvittava aika |
|---|---|
| Emolevy (Playboard-ohjain) | 3 minuuttia |
| PlayPad 4.0 | 1 minuutti |
| TOC-lauta (Auton TOP-liitäntä) | 1 minuutti |
| DMCPIT-lauta (auton COP-liitäntä) | 1 minuutti |
| Sarjapainikkeiden liitännät (BDU-laitteet) | 30 sekuntia |
| Paisuntalevyt (PIT8 / 16RL / 16IO) | 30 sekuntia |
(Taulukko III.1 – Sw-päivityksen ajoitus)






